- Плоское движение твердого тела

Содержание
- 2. 2 Лоуренс Хаусмен, 1865-1959, Bromsgrove
- 3. 2 Bromsgrove
- 4. 3 На предыдущей лекции Сформулирован способ задания движения ТТ Введено понятие степеней свободы Определено поступательное движение
- 5. Цель лекции Изучить плоское движение ТТ 9.1. Задание плоского движения ТТ 9.2. Скорости точек при плоском
- 6. 9.1. Задание плоского движения твердого тела 5
- 7. 9.1.1. Определение и мотивация 2.1. ОПРЕДЕЛЕНИЕ ССС 9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 6 Двигатель внутреннего
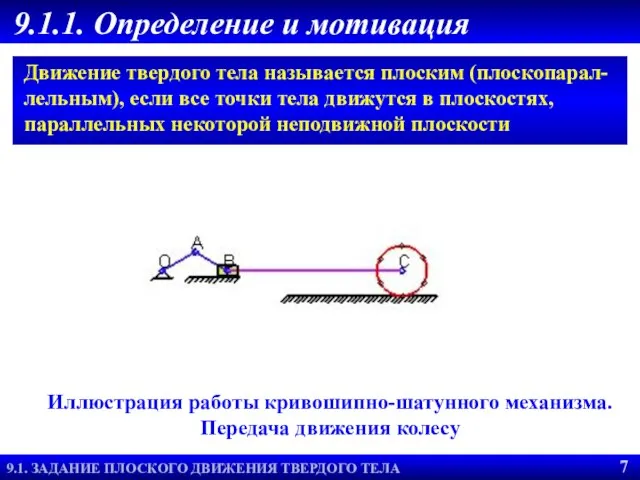
- 8. 9.1.1. Определение и мотивация 2.1. ОПРЕДЕЛЕНИЕ ССС 9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 7 Иллюстрация работы
- 9. 9.1.1. Определение и мотивация 2.1. ОПРЕДЕЛЕНИЕ ССС 9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 8 Иллюстрация работы
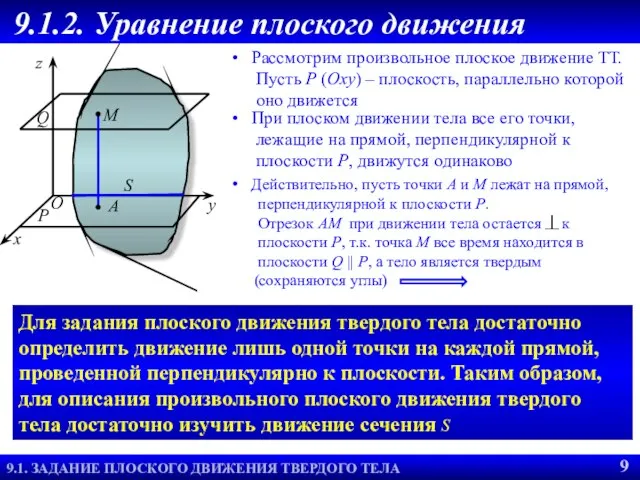
- 10. Рассмотрим произвольное плоское движение ТТ. Пусть Р (Оху) – плоскость, параллельно которой оно движется Q Р
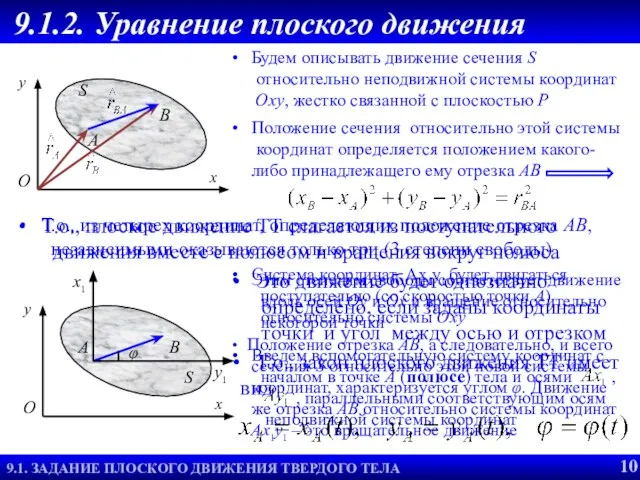
- 11. Введем вспомогательную систему координат с началом в точке А (полюсе) тела и осями , , параллельными
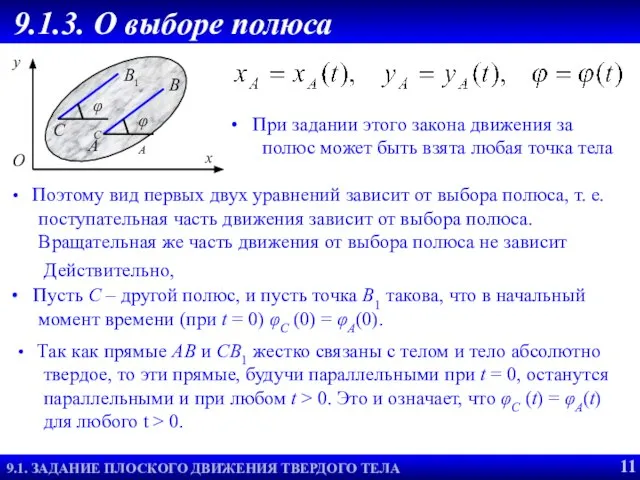
- 12. При задании этого закона движения за полюс может быть взята любая точка тела B 9.1.3. О
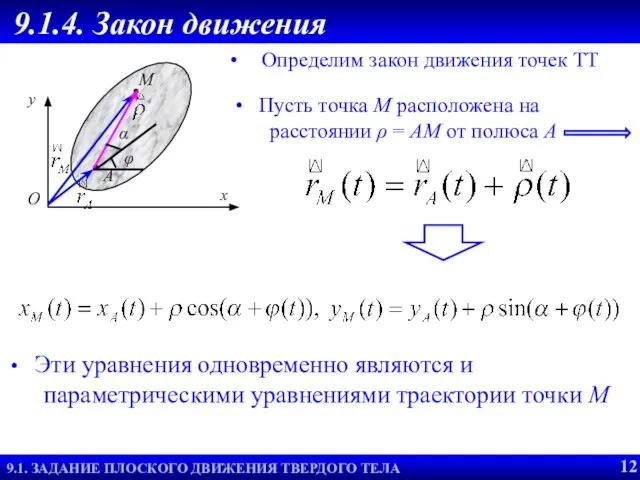
- 13. Эти уравнения одновременно являются и параметрическими уравнениями траектории точки М Определим закон движения точек ТТ 9.1.4.
- 14. 9.2. Скорости точек ТТ при плоском движении 13
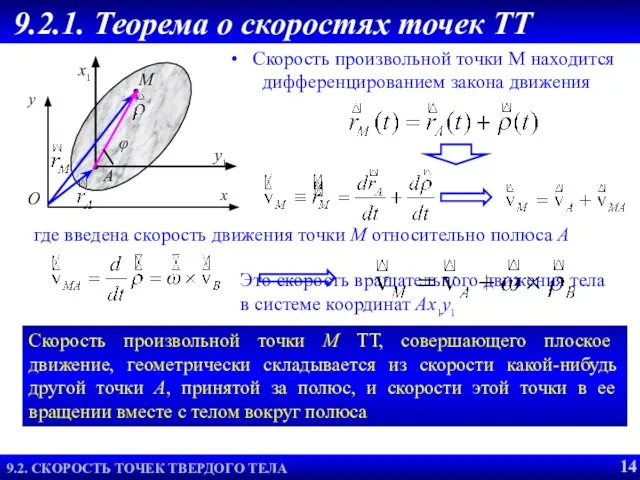
- 15. Это скорость вращательного движения тела в системе координат Ах1у1 Скорость произвольной точки М ТТ, совершающего плоское
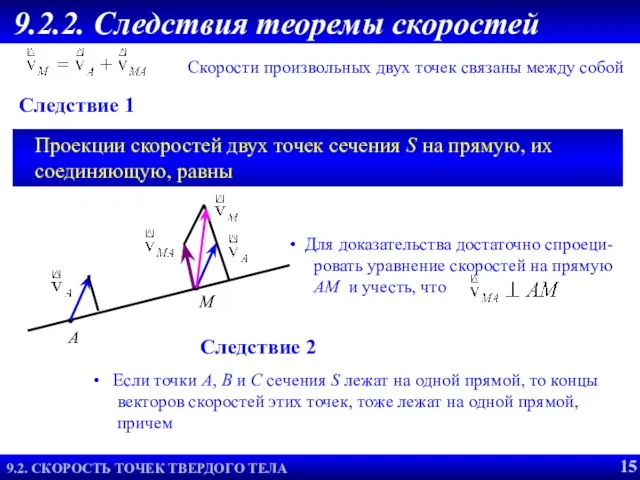
- 16. Проекции скоростей двух точек сечения S на прямую, их соединяющую, равны Следствие 1 9.2.2. Следствия теоремы
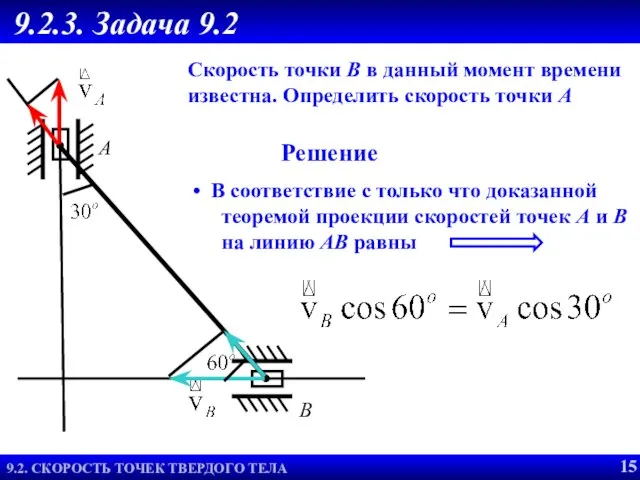
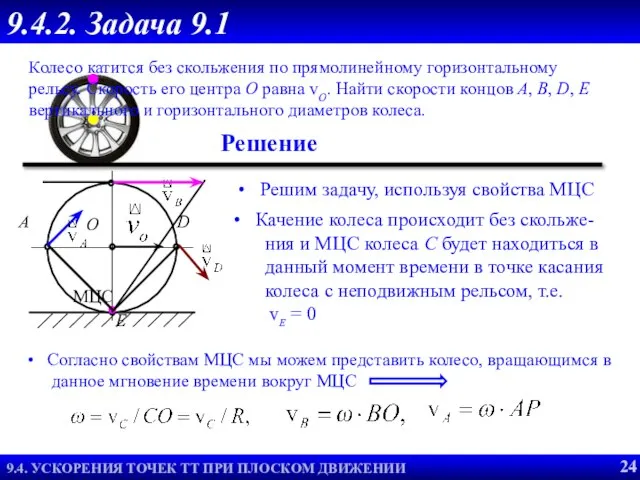
- 17. 9.2.3. Задача 9.2 9.2. СКОРОСТЬ ТОЧЕК ТВЕРДОГО ТЕЛА Решение 15 Скорость точки В в данный момент
- 18. 9.3. Мгновенный центр скоростей 16
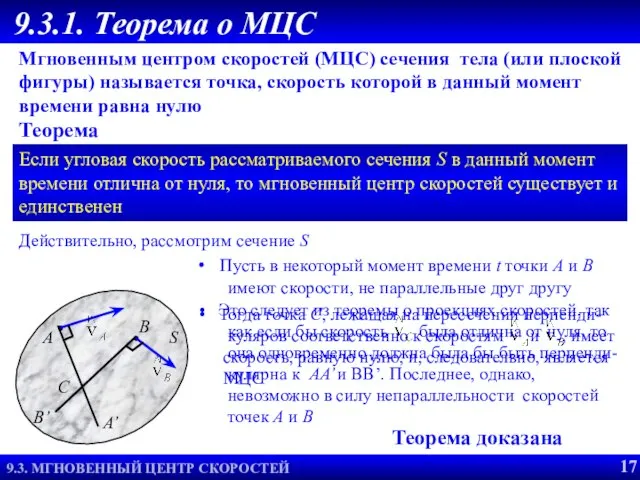
- 19. Это следует из теоремы о проекциях скоростей, так как если бы скорость была отлична от нуля,
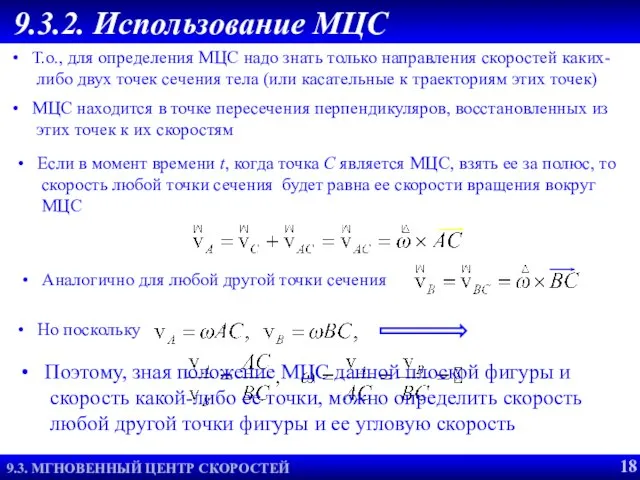
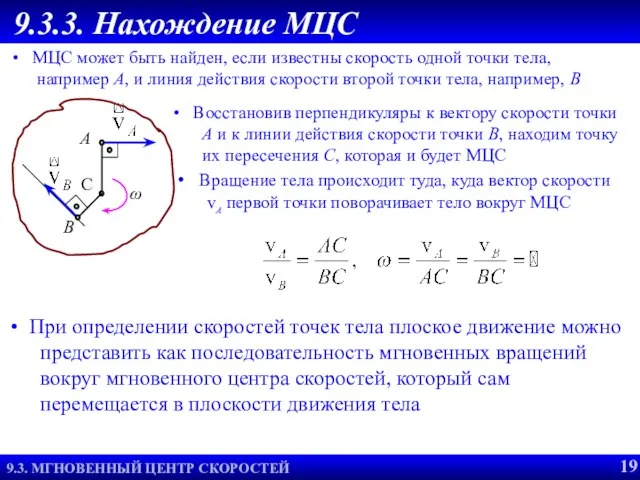
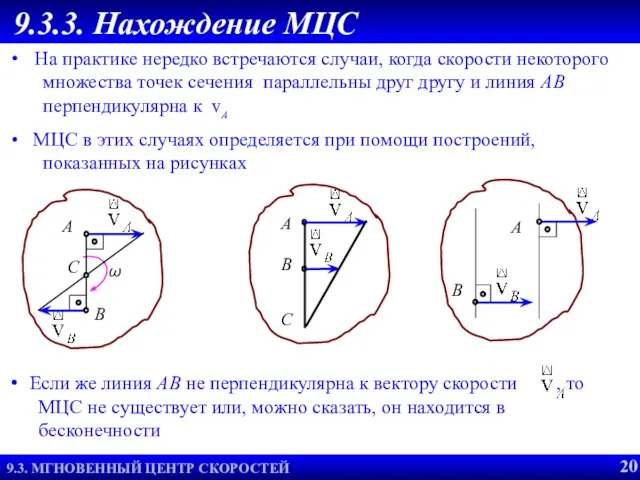
- 20. Но поскольку Т.о., для определения МЦС надо знать только направления скоростей каких- либо двух точек сечения
- 21. При определении скоростей точек тела плоское движение можно представить как последовательность мгновенных вращений вокруг мгновенного центра
- 22. Если же линия АВ не перпендикулярна к вектору скорости , то МЦС не существует или, можно
- 23. 9.4. Ускорение точек ТТ при плоском движении 21
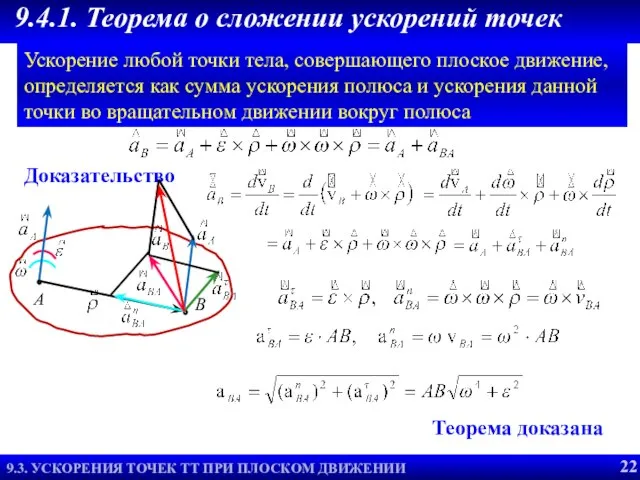
- 24. Теорема о сложении ускорений Ускорение любой точки тела, совершающего плоское движение, определяется как сумма ускорения полюса
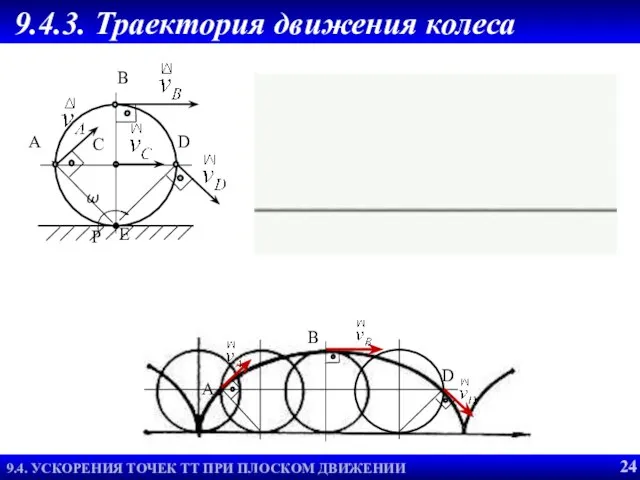
- 25. Согласно свойствам МЦС мы можем представить колесо, вращающимся в данное мгновение времени вокруг МЦС 9.4.2. Задача
- 26. Вместо проверки
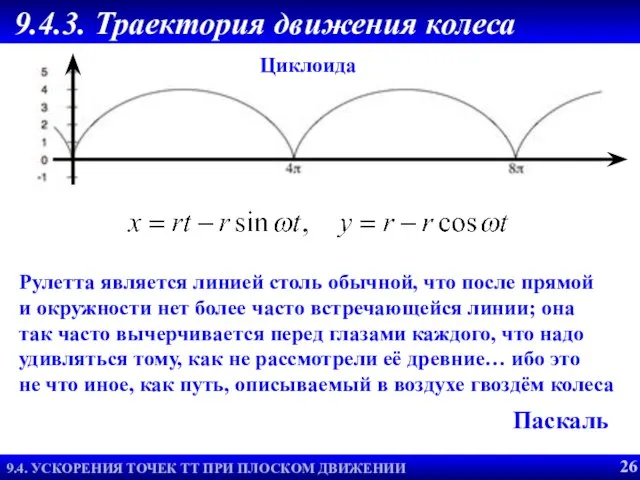
- 27. Циклоида Рулетта является линией столь обычной, что после прямой и окружности нет более часто встречающейся линии;
- 28. 9.5. Расчет плоского механизма 27
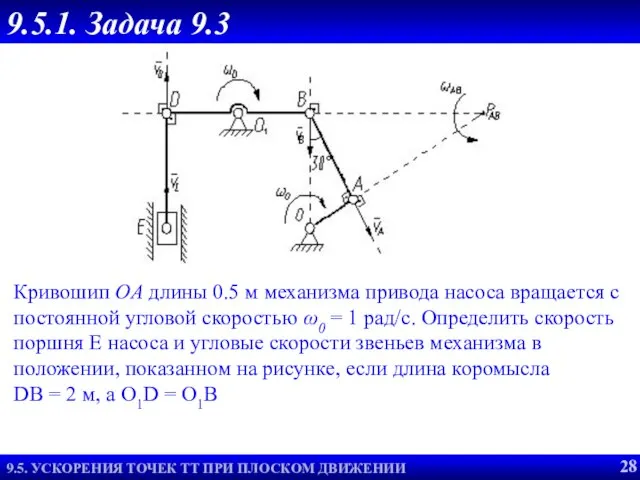
- 29. Пример 2. Кривошип OA длины 0.5 м механизма привода насоса вращается с постоянной угловой скоростью ω0
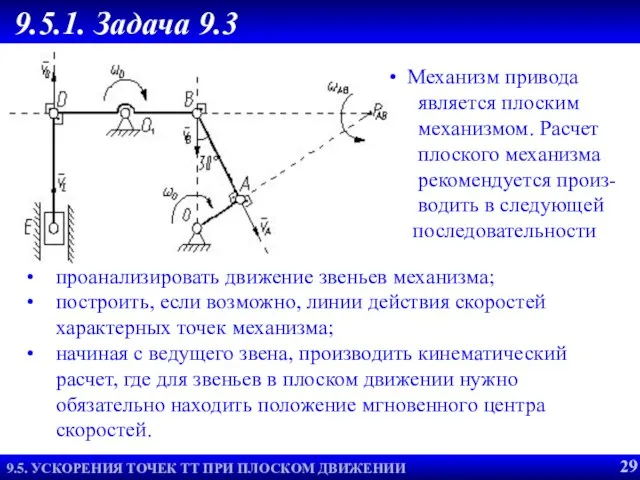
- 30. Пример 2. Механизм привода является плоским механизмом. Расчет плоского механизма рекомендуется произ- водить в следующей последовательности
- 31. 9.6.1. Основные выводы ЗАКЛЮЧЕНИЕ Введено понятие плоского движения ТТ Показано, что при плоском движении скорости точек
- 33. Скачать презентацию
Слайд 32
Bromsgrove
2
Bromsgrove

Слайд 43
На предыдущей лекции
Сформулирован способ задания движения ТТ
Введено понятие степеней свободы
3
На предыдущей лекции
Сформулирован способ задания движения ТТ
Введено понятие степеней свободы
Слайд 5
Цель лекции
Изучить плоское движение ТТ
9.1. Задание плоского движения ТТ
9.2.
Цель лекции
Изучить плоское движение ТТ
9.1. Задание плоского движения ТТ
9.2.
Слайд 69.1. Задание плоского движения твердого тела
5
9.1. Задание плоского движения твердого тела
5
Слайд 79.1.1. Определение и мотивация
2.1. ОПРЕДЕЛЕНИЕ ССС
9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
6
Двигатель
9.1.1. Определение и мотивация
2.1. ОПРЕДЕЛЕНИЕ ССС
9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
6
Двигатель

Слайд 89.1.1. Определение и мотивация
2.1. ОПРЕДЕЛЕНИЕ ССС
9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
7
Иллюстрация
9.1.1. Определение и мотивация
2.1. ОПРЕДЕЛЕНИЕ ССС
9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
7
Иллюстрация
Слайд 99.1.1. Определение и мотивация
2.1. ОПРЕДЕЛЕНИЕ ССС
9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
8
Иллюстрация
9.1.1. Определение и мотивация
2.1. ОПРЕДЕЛЕНИЕ ССС
9.1. ЗАДАНИЕ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
8
Иллюстрация

Слайд 10 Рассмотрим произвольное плоское движение ТТ.
Пусть Р (Оху) – плоскость,
Рассмотрим произвольное плоское движение ТТ.
Пусть Р (Оху) – плоскость,
Слайд 11 Введем вспомогательную систему координат с
началом в точке А (полюсе)
Введем вспомогательную систему координат с
началом в точке А (полюсе)
Слайд 12 При задании этого закона движения за
полюс может быть взята
При задании этого закона движения за
полюс может быть взята
Слайд 13 Эти уравнения одновременно являются и
параметрическими уравнениями траектории точки М
Определим
Эти уравнения одновременно являются и
параметрическими уравнениями траектории точки М
Определим
Слайд 149.2. Скорости точек ТТ при плоском движении
13
9.2. Скорости точек ТТ при плоском движении
13
Слайд 15Это скорость вращательного движения тела
в системе координат Ах1у1
Скорость произвольной точки М
Это скорость вращательного движения тела
в системе координат Ах1у1
Скорость произвольной точки М
Слайд 16 Проекции скоростей двух точек сечения S на прямую, их
соединяющую, равны
Проекции скоростей двух точек сечения S на прямую, их
соединяющую, равны
Слайд 179.2.3. Задача 9.2
9.2. СКОРОСТЬ ТОЧЕК ТВЕРДОГО ТЕЛА
Решение
15
Скорость точки В в данный момент
9.2.3. Задача 9.2
9.2. СКОРОСТЬ ТОЧЕК ТВЕРДОГО ТЕЛА
Решение
15
Скорость точки В в данный момент
Слайд 189.3. Мгновенный центр скоростей
16
9.3. Мгновенный центр скоростей
16
Слайд 19 Это следует из теоремы о проекциях скоростей, так
как если бы
Это следует из теоремы о проекциях скоростей, так
как если бы
Слайд 20 Но поскольку
Т.о., для определения МЦС надо знать только направления
Но поскольку
Т.о., для определения МЦС надо знать только направления
Слайд 21 При определении скоростей точек тела плоское движение можно
представить как последовательность
При определении скоростей точек тела плоское движение можно
представить как последовательность
Слайд 22 Если же линия АВ не перпендикулярна к вектору скорости , то
Если же линия АВ не перпендикулярна к вектору скорости , то
Слайд 239.4. Ускорение точек ТТ при плоском движении
21
9.4. Ускорение точек ТТ при плоском движении
21
Слайд 24Теорема о сложении ускорений
Ускорение любой точки тела, совершающего плоское движение, определяется как
Теорема о сложении ускорений
Ускорение любой точки тела, совершающего плоское движение, определяется как
Слайд 25 Согласно свойствам МЦС мы можем представить колесо, вращающимся в
данное
Согласно свойствам МЦС мы можем представить колесо, вращающимся в
данное
Слайд 26Вместо проверки
Вместо проверки
Слайд 27Циклоида
Рулетта является линией столь обычной, что после прямой
и окружности нет более
Циклоида
Рулетта является линией столь обычной, что после прямой
и окружности нет более
Слайд 289.5. Расчет плоского механизма
27
9.5. Расчет плоского механизма
27
Слайд 29Пример 2.
Кривошип OA длины 0.5 м механизма привода насоса вращается с постоянной
Пример 2.
Кривошип OA длины 0.5 м механизма привода насоса вращается с постоянной
Слайд 30Пример 2.
Механизм привода
является плоским
механизмом. Расчет
плоского механизма
Пример 2.
Механизм привода
является плоским
механизмом. Расчет
плоского механизма
Слайд 319.6.1. Основные выводы
ЗАКЛЮЧЕНИЕ
Введено понятие плоского движения ТТ
Показано, что при плоском
9.6.1. Основные выводы
ЗАКЛЮЧЕНИЕ
Введено понятие плоского движения ТТ
Показано, что при плоском
 Все про Акваріуми
Все про Акваріуми Гемодинамика
Гемодинамика Повышение мотивации
Повышение мотивации Притча о лягушках
Притча о лягушках РЫНОЧНЫЙ СПРОС Условия формирования спроса доступность
РЫНОЧНЫЙ СПРОС Условия формирования спроса доступность БАМ
БАМ Кращі Інтернет-кампанії в середовищі NGO Україна, Київ, 30 січня 2010 р. Сергій Даниленко. - презентация
Кращі Інтернет-кампанії в середовищі NGO Україна, Київ, 30 січня 2010 р. Сергій Даниленко. - презентация Толстой Севастопольские рассказы
Толстой Севастопольские рассказы Сударыня-Масленица
Сударыня-Масленица Таланты Забайкалья
Таланты Забайкалья Организация горячего питания в МОУ-СОШ №10
Организация горячего питания в МОУ-СОШ №10 КАМЕРЫ ЗАДНЕГО ВИДА PARKCITY 1 Назначение, принцип работы, критерии выбора 2 Технология, характеристики 34 Инсталляция, подключение 5 При
КАМЕРЫ ЗАДНЕГО ВИДА PARKCITY 1 Назначение, принцип работы, критерии выбора 2 Технология, характеристики 34 Инсталляция, подключение 5 При Блок обучения. Для сотрудников Компании “Шин Line”
Блок обучения. Для сотрудников Компании “Шин Line” Мед-Биз. 3 кейса успешных клиник + подарок для участников
Мед-Биз. 3 кейса успешных клиник + подарок для участников Экология на предприятии "Маяк"
Экология на предприятии "Маяк" Флаги Военных подразделений Российской Федерации
Флаги Военных подразделений Российской Федерации Как рассчитать нагрузку преподавателей при работе в режиме онлайн? Тихомирова Е. В. 18 ноября 2010
Как рассчитать нагрузку преподавателей при работе в режиме онлайн? Тихомирова Е. В. 18 ноября 2010 Антикризисная альтернатива*
Антикризисная альтернатива* о шиханах Тратау и Юрактау
о шиханах Тратау и Юрактау Преимущества Альфа-Банка
Преимущества Альфа-Банка Оздоровительные технологии
Оздоровительные технологии Японский кадастр
Японский кадастр Викторина по русскому языку
Викторина по русскому языку Презентация на Игрища
Презентация на Игрища Лексика
Лексика Case one
Case one Джазовый пароход
Джазовый пароход Запрос котировок 2022
Запрос котировок 2022