- Пр4_Мод_Сист_Монга

Содержание
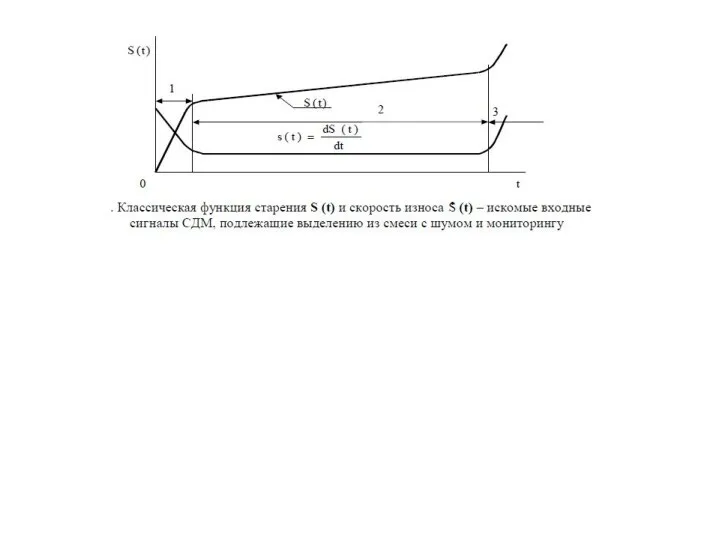
- 2. Обобщенная математическая модель системы мониторинга Математическая модель детерминированного процесса единого закона динамики старения Входным сигналом системы
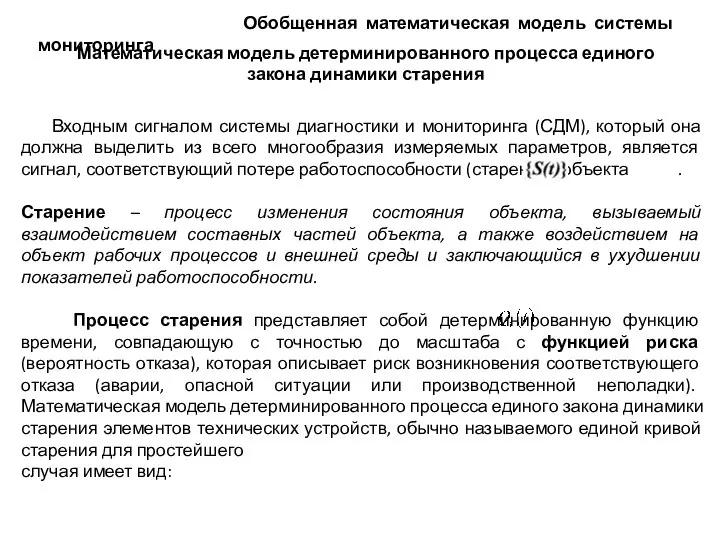
- 3. Обобщенная математическая модель системы мониторинга Математическая модель детерминированного процесса единого закона динамики старения Входным сигналом системы
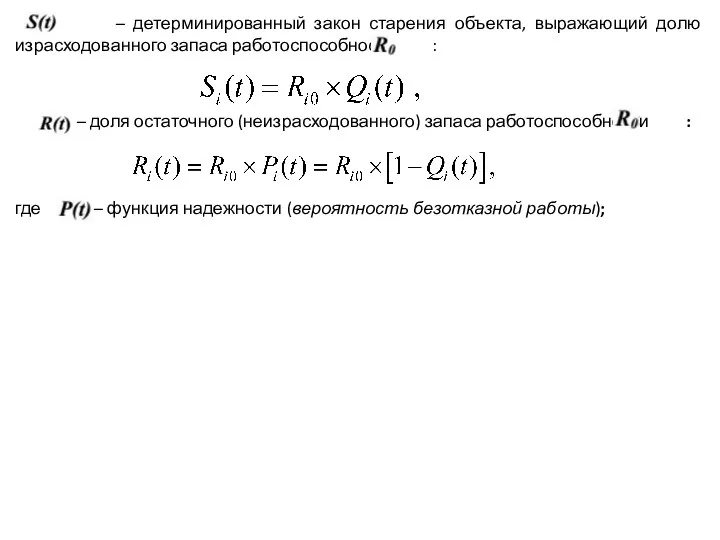
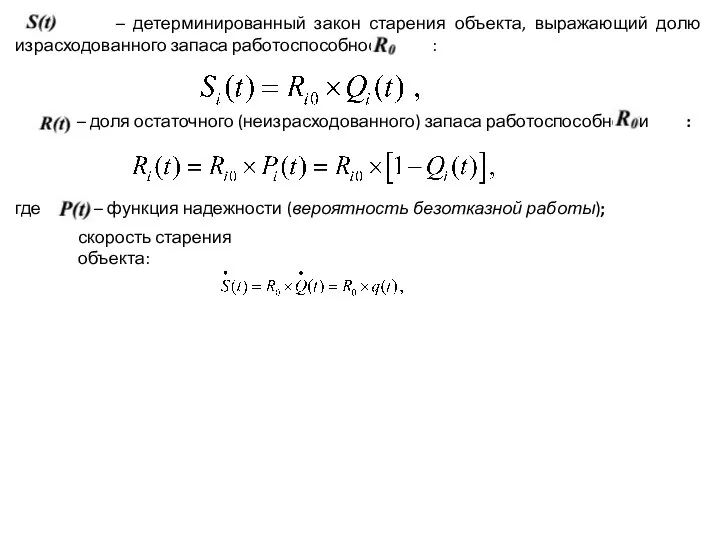
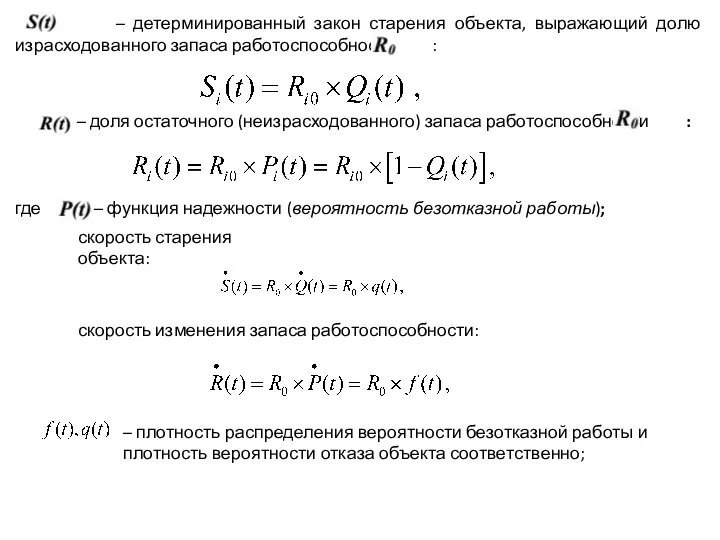
- 5. – детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности : – доля остаточного (неизрасходованного) запаса
- 6. – детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности : – доля остаточного (неизрасходованного) запаса
- 7. – детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности : – доля остаточного (неизрасходованного) запаса
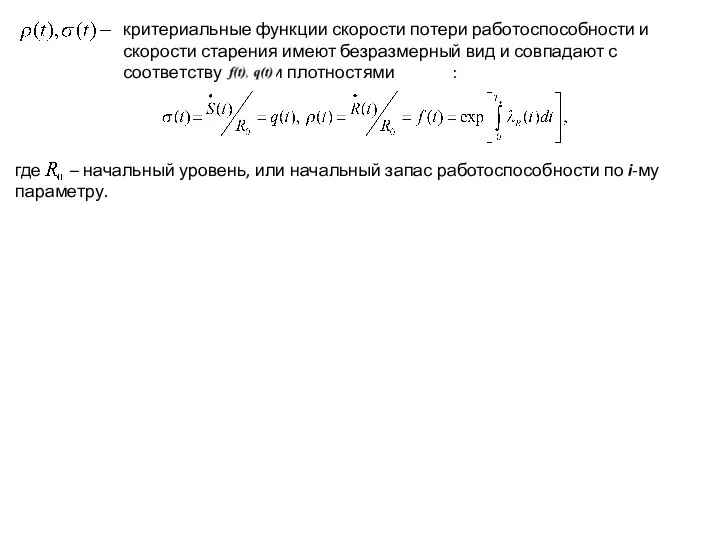
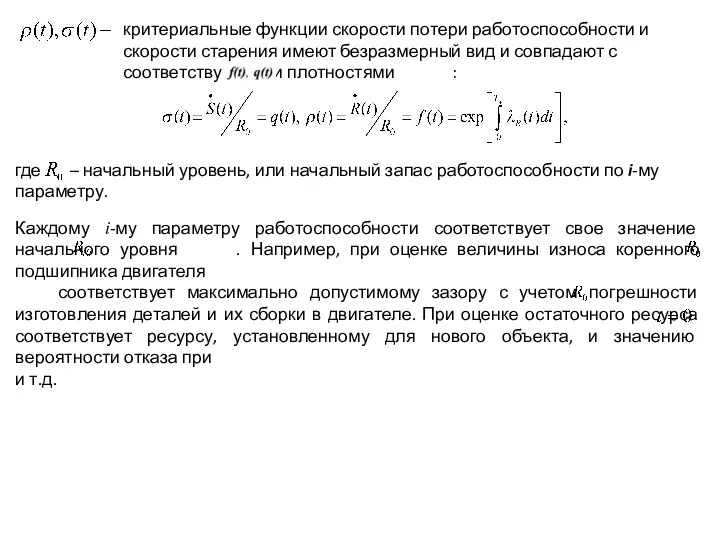
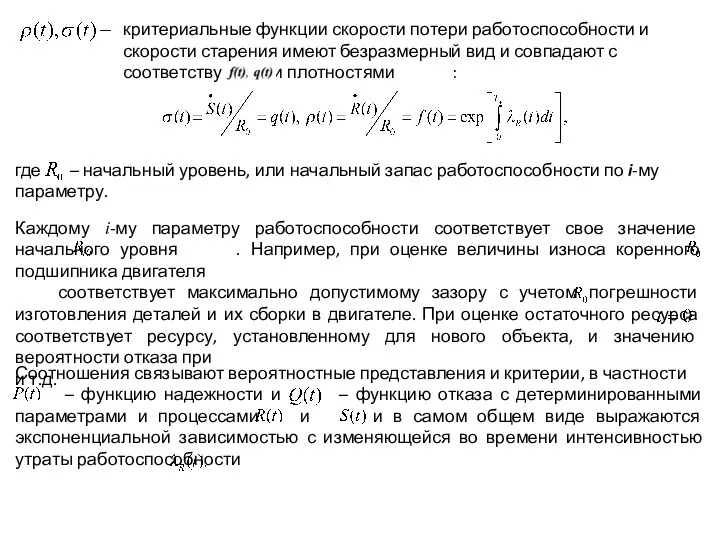
- 8. где – начальный уровень, или начальный запас работоспособности по i-му параметру. критериальные функции скорости потери работоспособности
- 9. где – начальный уровень, или начальный запас работоспособности по i-му параметру. критериальные функции скорости потери работоспособности
- 10. где – начальный уровень, или начальный запас работоспособности по i-му параметру. критериальные функции скорости потери работоспособности
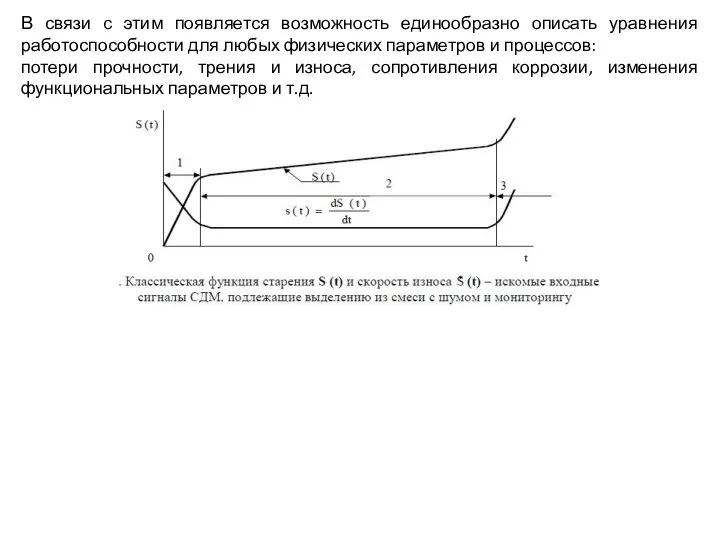
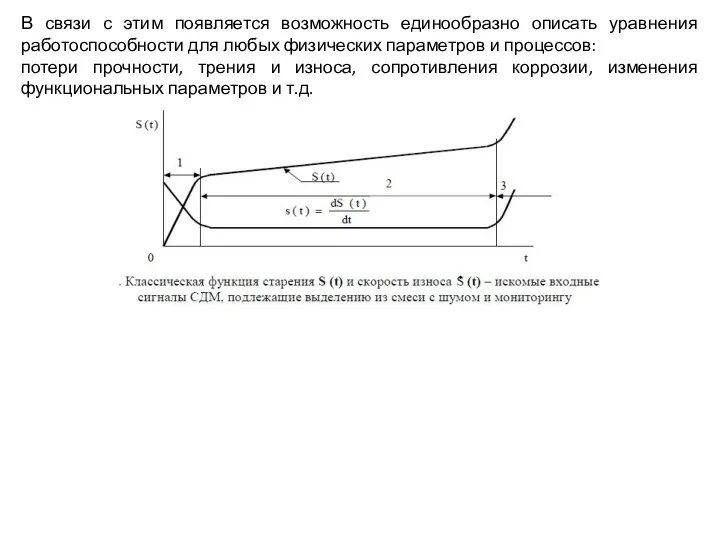
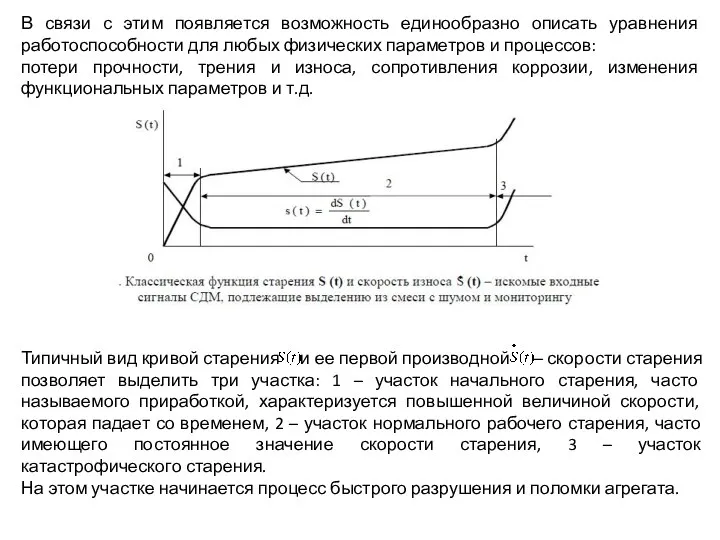
- 11. В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых физических параметров и процессов:
- 12. В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых физических параметров и процессов:
- 13. В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых физических параметров и процессов:
- 14. В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых физических параметров и процессов:
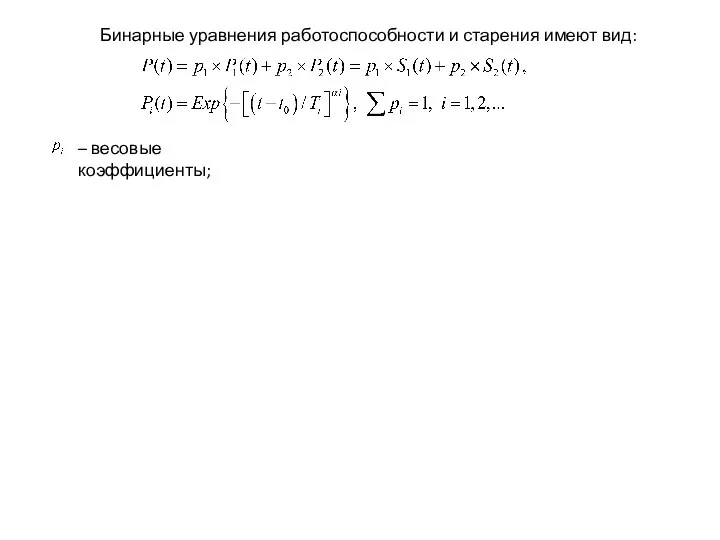
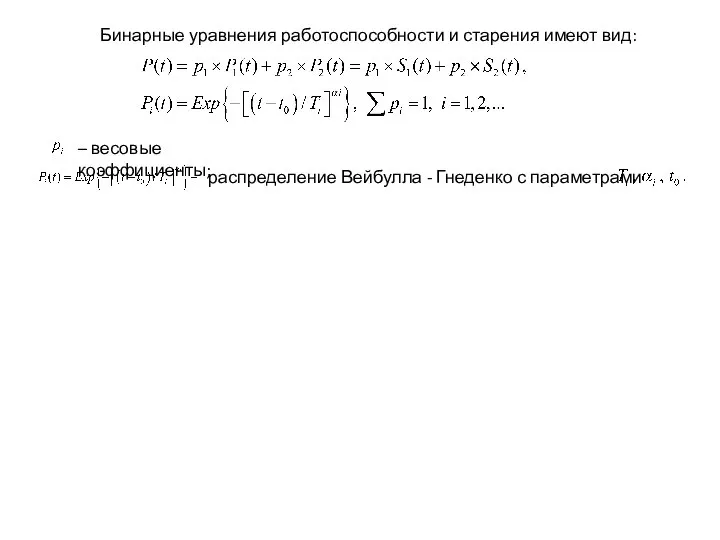
- 15. Бинарные уравнения работоспособности и старения имеют вид: – весовые коэффициенты;
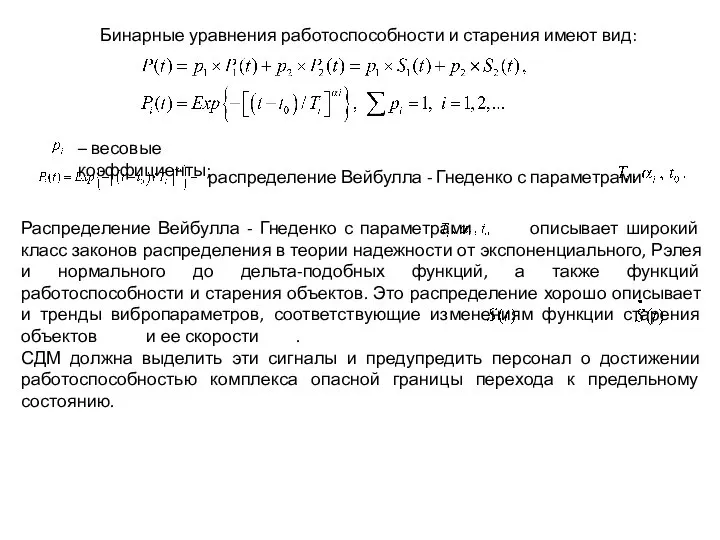
- 16. Бинарные уравнения работоспособности и старения имеют вид: – весовые коэффициенты; распределение Вейбулла - Гнеденко с параметрами
- 17. Бинарные уравнения работоспособности и старения имеют вид: – весовые коэффициенты; распределение Вейбулла - Гнеденко с параметрами
- 18. Блок-схема обобщенной модели системы мониторинга состояния агрегатов Диагностика, как единовременный акт, оценивает остаточную работоспособность агрегатов в
- 19. Блок-схема обобщенной модели системы мониторинга состояния агрегатов Диагностика, как единовременный акт, оценивает остаточную работоспособность агрегатов в
- 20. Блок-схема обобщенной модели системы мониторинга состояния агрегатов Диагностика, как единовременный акт, оценивает остаточную работоспособность агрегатов в
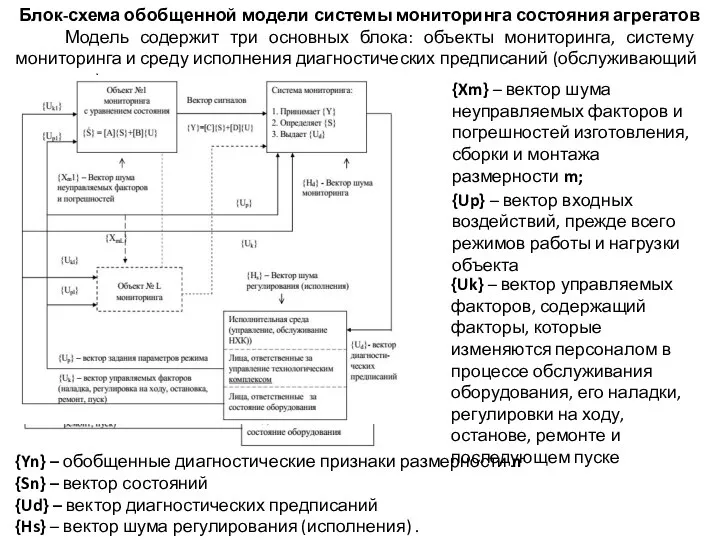
- 21. Блок-схема обобщенной модели системы мониторинга состояния агрегатов Модель содержит три основных блока: объекты мониторинга, систему мониторинга
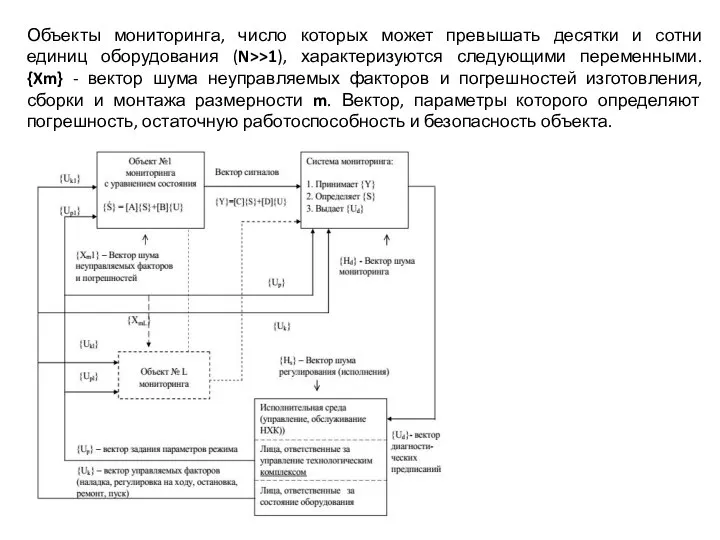
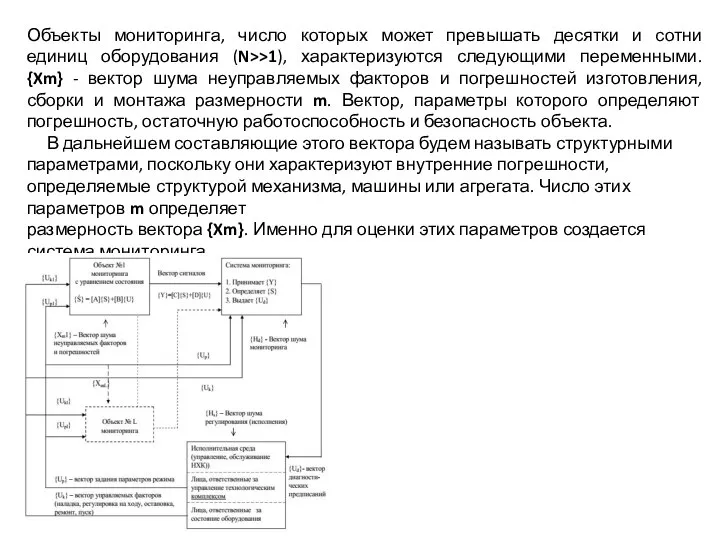
- 22. Объекты мониторинга, число которых может превышать десятки и сотни единиц оборудования (N>>1), характеризуются следующими переменными. {Xm}
- 23. Объекты мониторинга, число которых может превышать десятки и сотни единиц оборудования (N>>1), характеризуются следующими переменными. {Xm}
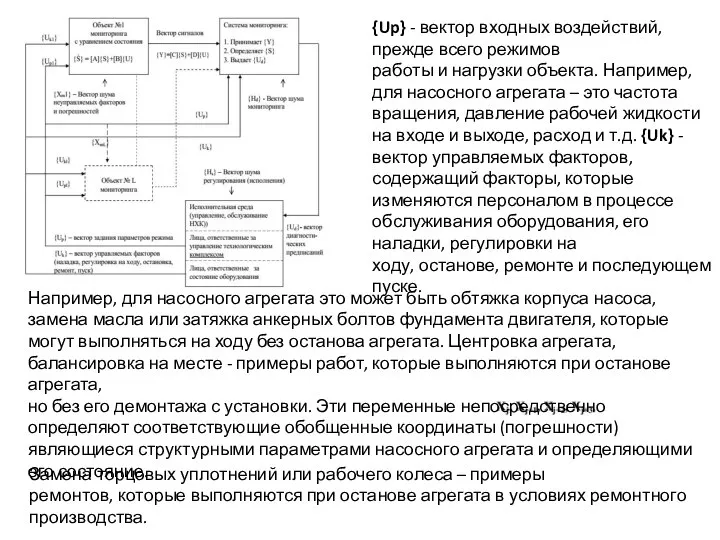
- 24. {Up} - вектор входных воздействий, прежде всего режимов работы и нагрузки объекта. Например, для насосного агрегата
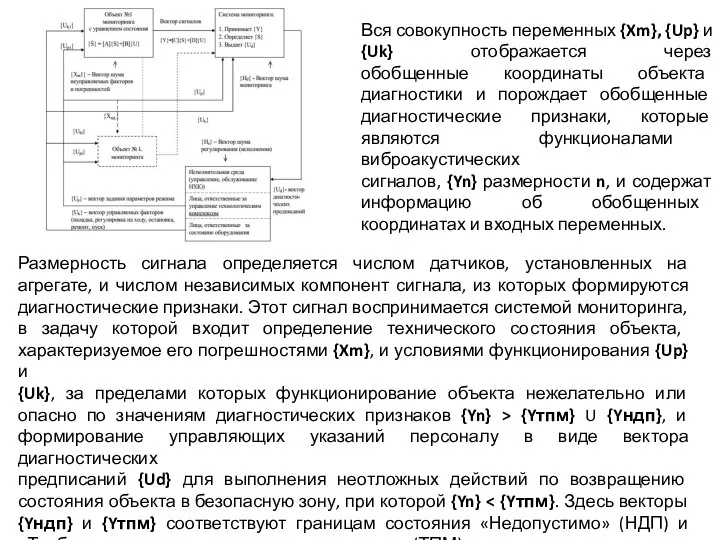
- 25. Вся совокупность переменных {Xm}, {Up} и {Uk} отображается через обобщенные координаты объекта диагностики и порождает обобщенные
- 26. На качество функционирования системы мониторинга существенное влияние оказывает шум мониторинга {Hd}, который определяется погрешностями измерения параметров
- 27. Ясно, что решение о соответствующих работах с объектом мониторинга, находящимся в критическом состоянии и требующим внимания,
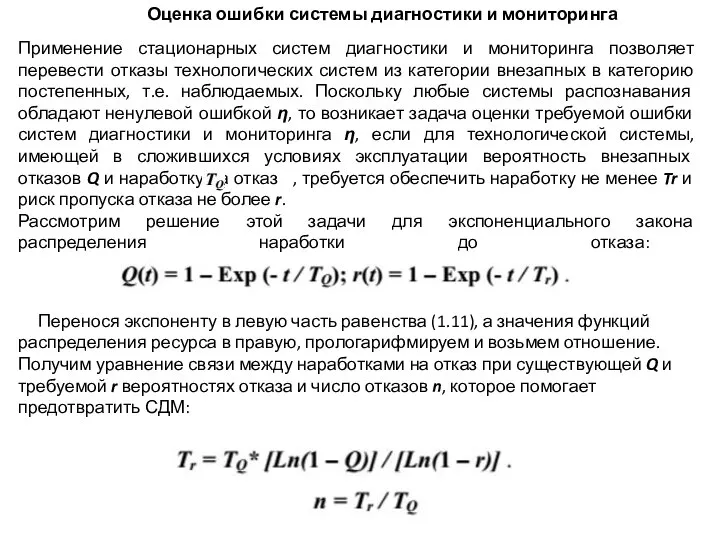
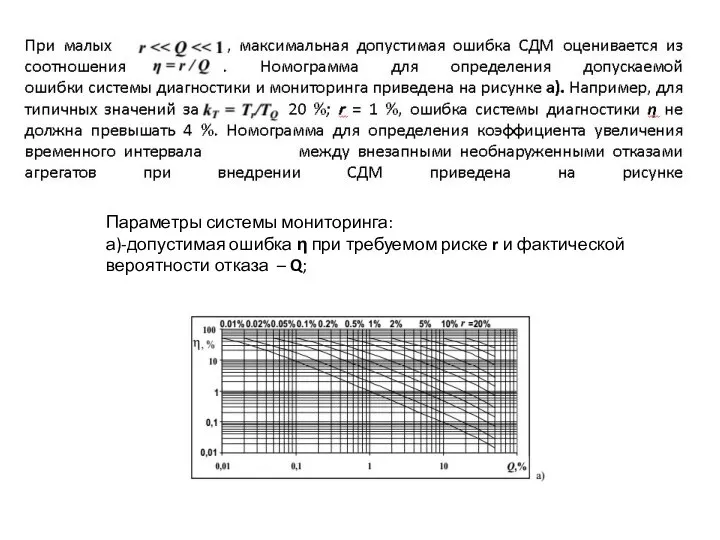
- 28. Оценка ошибки системы диагностики и мониторинга Применение стационарных систем диагностики и мониторинга позволяет перевести отказы технологических
- 29. Оценка ошибки системы диагностики и мониторинга Применение стационарных систем диагностики и мониторинга позволяет перевести отказы технологических
- 30. Оценка ошибки системы диагностики и мониторинга Применение стационарных систем диагностики и мониторинга позволяет перевести отказы технологических
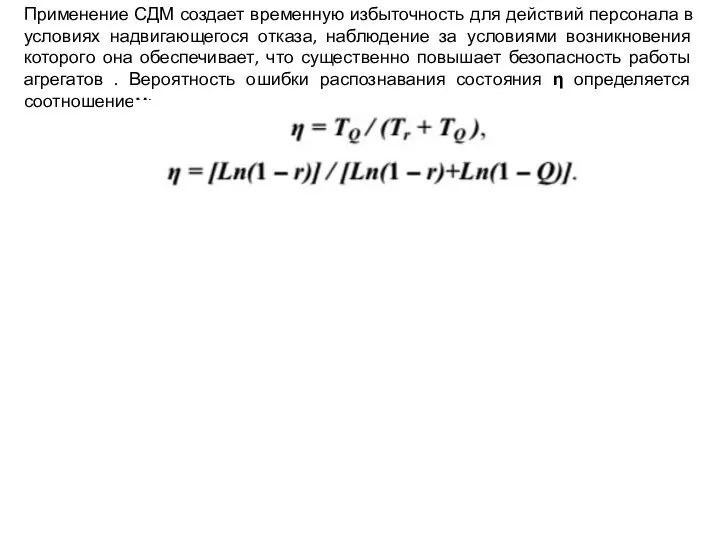
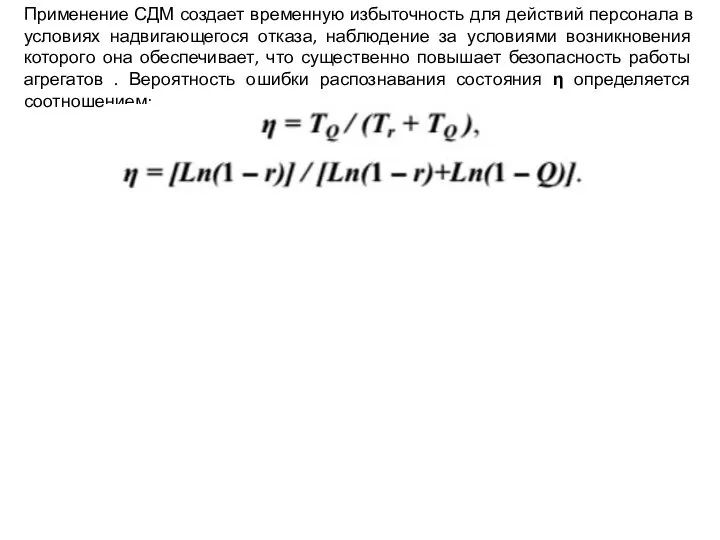
- 31. Применение СДМ создает временную избыточность для действий персонала в условиях надвигающегося отказа, наблюдение за условиями возникновения
- 32. Применение СДМ создает временную избыточность для действий персонала в условиях надвигающегося отказа, наблюдение за условиями возникновения
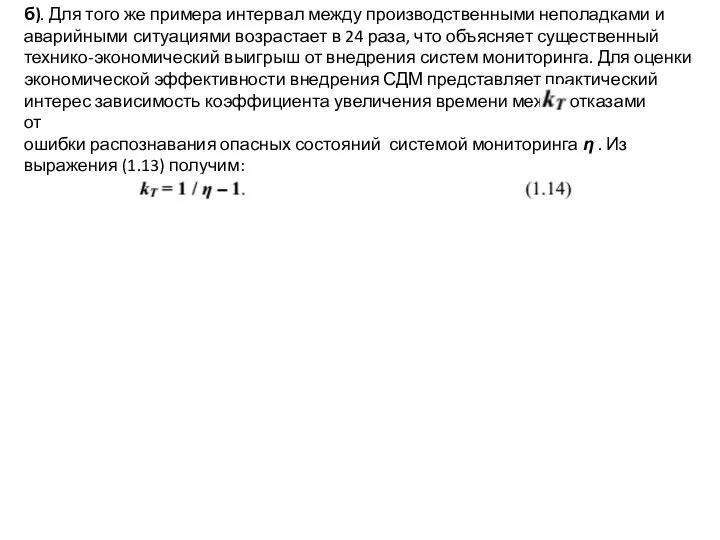
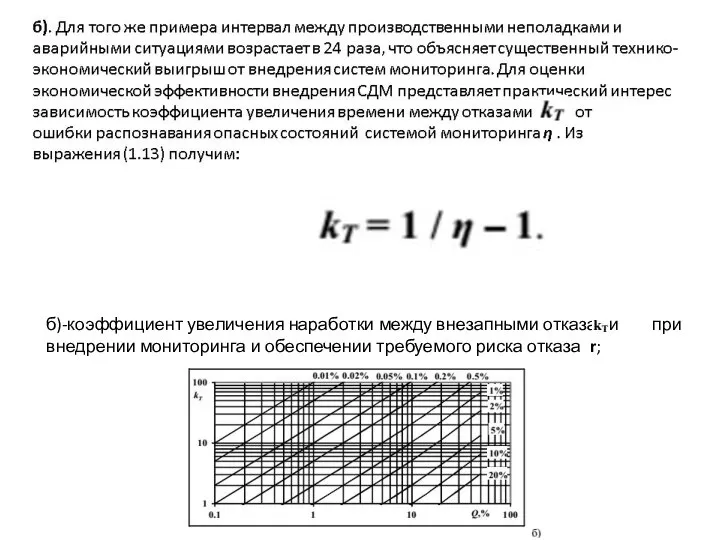
- 33. б). Для того же примера интервал между производственными неполадками и аварийными ситуациями возрастает в 24 раза,
- 34. Параметры системы мониторинга: а)-допустимая ошибка η при требуемом риске r и фактической вероятности отказа – Q;
- 35. б)-коэффициент увеличения наработки между внезапными отказами при внедрении мониторинга и обеспечении требуемого риска отказа r;
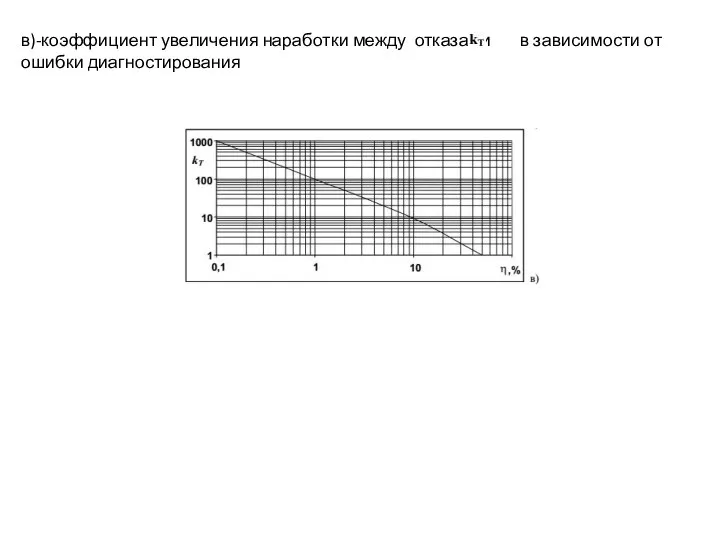
- 36. в)-коэффициент увеличения наработки между отказами в зависимости от ошибки диагностирования
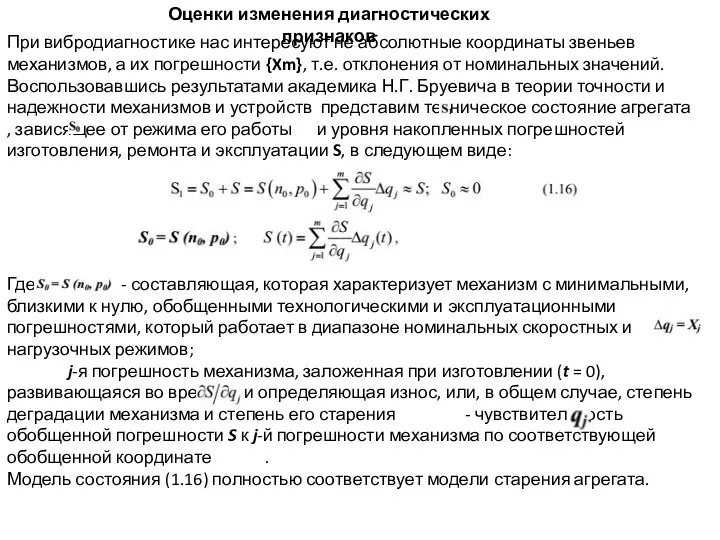
- 37. Оценки изменения диагностических признаков При вибродиагностике нас интересуют не абсолютные координаты звеньев механизмов, а их погрешности
- 38. Оценки изменения диагностических признаков При вибродиагностике нас интересуют не абсолютные координаты звеньев механизмов, а их погрешности
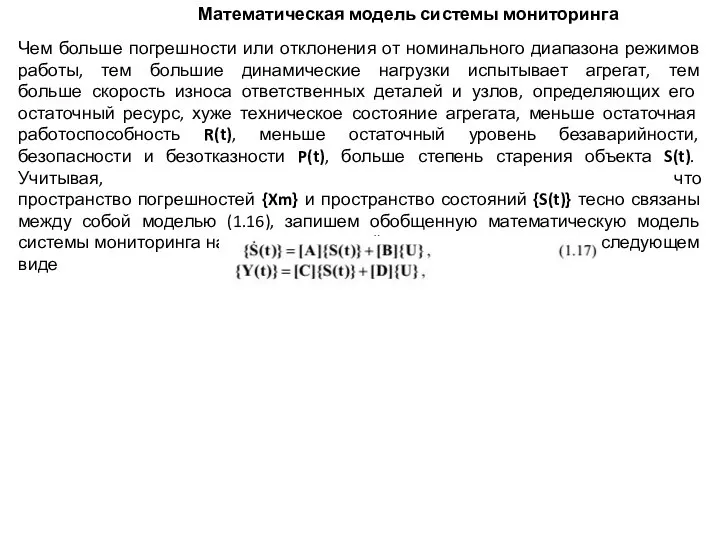
- 39. Математическая модель системы мониторинга Чем больше погрешности или отклонения от номинального диапазона режимов работы, тем большие
- 40. где {Sm(t)} – вектор функций старения агрегата размерности m, каждая составляющая которого характеризует его обобщенный (совокупный)
- 41. где {Sm(t)} – вектор функций старения агрегата размерности m, каждая составляющая которого характеризует его обобщенный (совокупный)
- 42. Матрицы [А], [В], [С], [D] определяются следующим образом: [m, m] – квадратная матрица системы , которая
- 43. Для вибродиагностики матрица D определяет влияние на параметры вибрации агрегата действий персонала – изменения режима работы
- 44. Составляющие , как правило, недоступны для непосредственного наблюдения, что заставляет использовать методы косвенных измерений и диагностики.
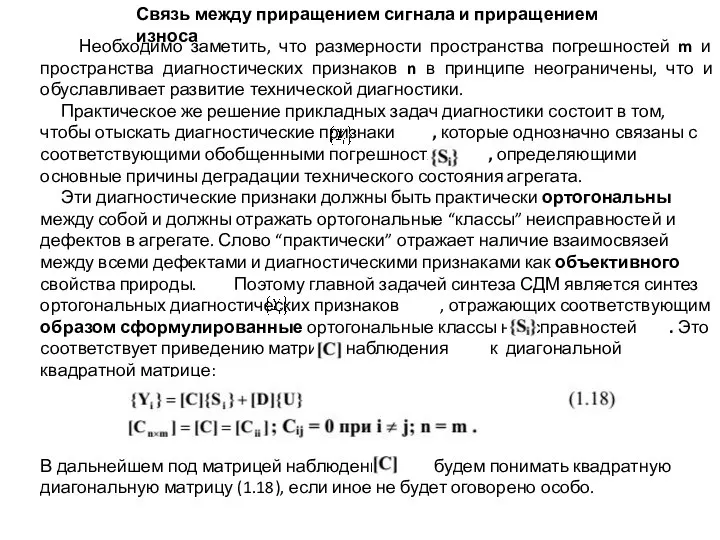
- 45. Связь между приращением сигнала и приращением износа Необходимо заметить, что размерности пространства погрешностей m и пространства
- 46. Связь между приращением сигнала и приращением износа Необходимо заметить, что размерности пространства погрешностей m и пространства
- 47. Связь между приращением сигнала и приращением износа Необходимо заметить, что размерности пространства погрешностей m и пространства
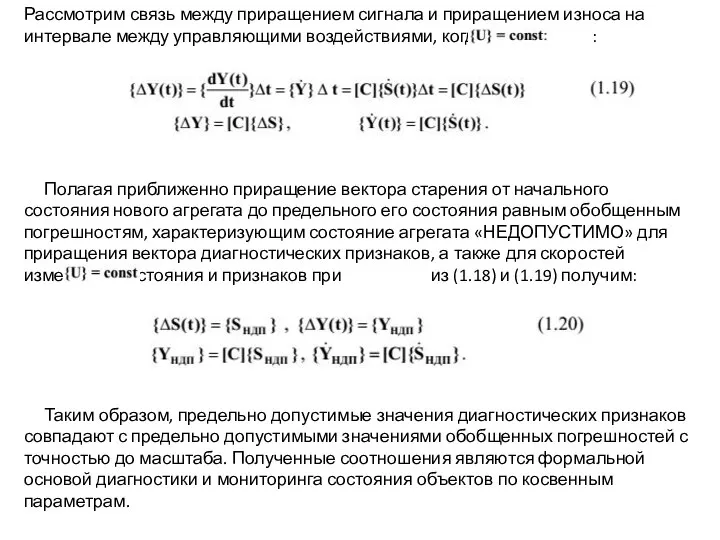
- 48. Рассмотрим связь между приращением сигнала и приращением износа на интервале между управляющими воздействиями, когда : Полагая
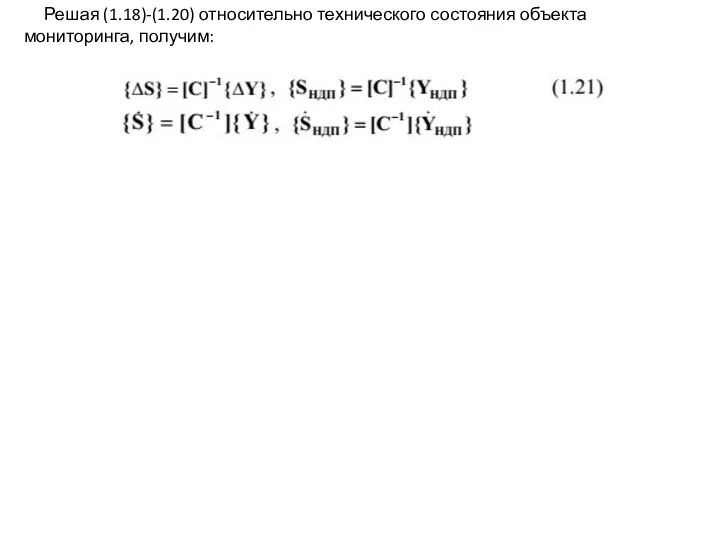
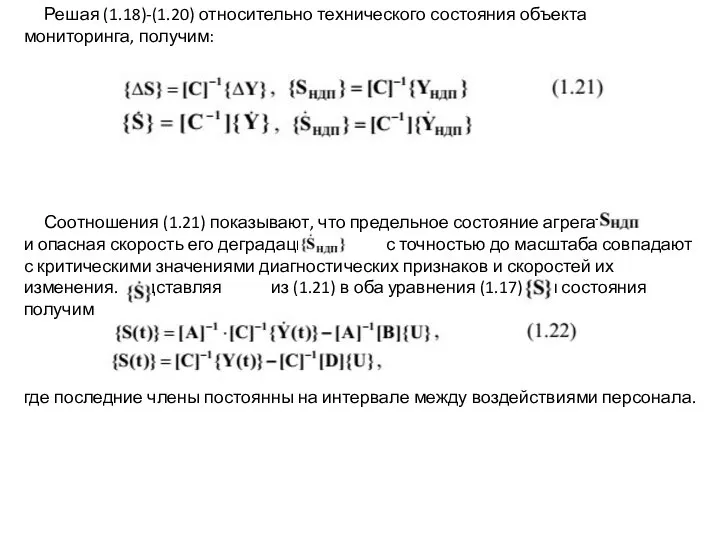
- 49. Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
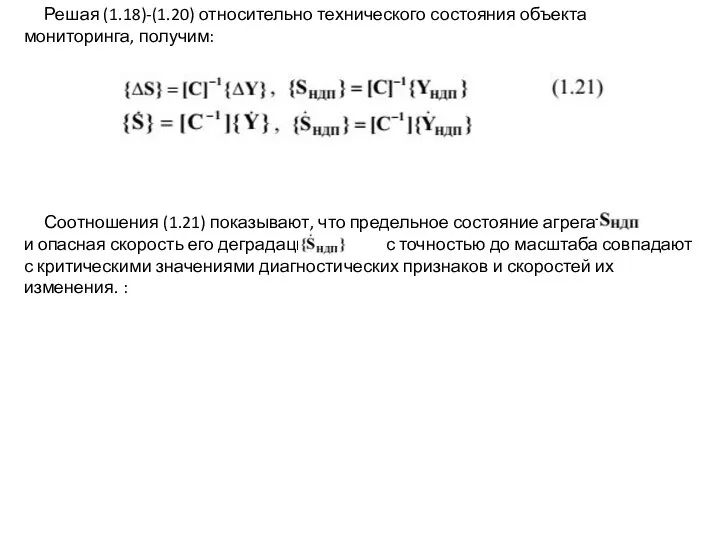
- 50. Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим: Соотношения (1.21) показывают, что предельное состояние агрегата и
- 51. Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим: Соотношения (1.21) показывают, что предельное состояние агрегата и
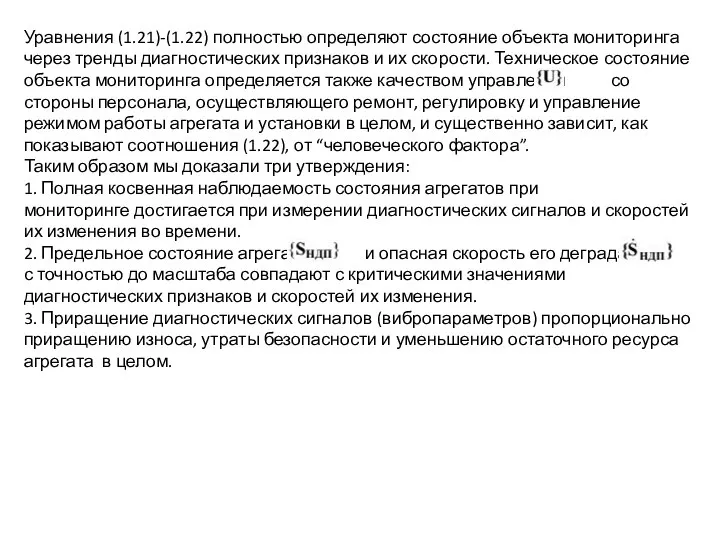
- 52. Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их скорости. Техническое состояние
- 53. Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их скорости. Техническое состояние
- 54. Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их скорости. Техническое состояние
- 55. Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их скорости. Техническое состояние
- 57. Скачать презентацию
Слайд 2 Обобщенная математическая модель системы мониторинга
Математическая модель детерминированного процесса единого
закона динамики старения
Обобщенная математическая модель системы мониторинга
Математическая модель детерминированного процесса единого
закона динамики старения
Слайд 3 Обобщенная математическая модель системы мониторинга
Математическая модель детерминированного процесса единого
закона динамики старения
Обобщенная математическая модель системы мониторинга
Математическая модель детерминированного процесса единого
закона динамики старения
Слайд 5 – детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности :
– детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности :
Слайд 6 – детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности :
– детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности :
Слайд 7 – детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности :
– детерминированный закон старения объекта, выражающий долю израсходованного запаса работоспособности :
Слайд 8где – начальный уровень, или начальный запас работоспособности по i-му параметру.
критериальные функции
где – начальный уровень, или начальный запас работоспособности по i-му параметру.
критериальные функции
Слайд 9где – начальный уровень, или начальный запас работоспособности по i-му параметру.
критериальные функции
где – начальный уровень, или начальный запас работоспособности по i-му параметру.
критериальные функции
Слайд 10где – начальный уровень, или начальный запас работоспособности по i-му параметру.
критериальные функции
где – начальный уровень, или начальный запас работоспособности по i-му параметру.
критериальные функции
Слайд 11В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
Слайд 12В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
Слайд 13В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
Слайд 14В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
В связи с этим появляется возможность единообразно описать уравнения работоспособности для любых
Слайд 15Бинарные уравнения работоспособности и старения имеют вид:
– весовые коэффициенты;
Бинарные уравнения работоспособности и старения имеют вид:
– весовые коэффициенты;
Слайд 16Бинарные уравнения работоспособности и старения имеют вид:
– весовые коэффициенты;
распределение Вейбулла - Гнеденко
Бинарные уравнения работоспособности и старения имеют вид:
– весовые коэффициенты;
распределение Вейбулла - Гнеденко
Слайд 17Бинарные уравнения работоспособности и старения имеют вид:
– весовые коэффициенты;
распределение Вейбулла - Гнеденко
Бинарные уравнения работоспособности и старения имеют вид:
– весовые коэффициенты;
распределение Вейбулла - Гнеденко
Слайд 18Блок-схема обобщенной модели системы мониторинга состояния
агрегатов
Диагностика, как единовременный акт, оценивает
Блок-схема обобщенной модели системы мониторинга состояния
агрегатов
Диагностика, как единовременный акт, оценивает
Слайд 19Блок-схема обобщенной модели системы мониторинга состояния
агрегатов
Диагностика, как единовременный акт, оценивает
Блок-схема обобщенной модели системы мониторинга состояния
агрегатов
Диагностика, как единовременный акт, оценивает
Слайд 20Блок-схема обобщенной модели системы мониторинга состояния
агрегатов
Диагностика, как единовременный акт, оценивает
Блок-схема обобщенной модели системы мониторинга состояния
агрегатов
Диагностика, как единовременный акт, оценивает
Слайд 21Блок-схема обобщенной модели системы мониторинга состояния агрегатов
Модель содержит три основных блока:
Блок-схема обобщенной модели системы мониторинга состояния агрегатов
Модель содержит три основных блока:
Слайд 22Объекты мониторинга, число которых может превышать десятки и сотни
единиц оборудования (N>>1), характеризуются
Объекты мониторинга, число которых может превышать десятки и сотни единиц оборудования (N>>1), характеризуются
Слайд 23Объекты мониторинга, число которых может превышать десятки и сотни
единиц оборудования (N>>1), характеризуются
Объекты мониторинга, число которых может превышать десятки и сотни единиц оборудования (N>>1), характеризуются
Слайд 24{Up} - вектор входных воздействий, прежде всего режимов
работы и нагрузки объекта. Например,
{Up} - вектор входных воздействий, прежде всего режимов работы и нагрузки объекта. Например,
Слайд 25
Вся совокупность переменных {Xm}, {Up} и {Uk} отображается через
обобщенные координаты объекта
Вся совокупность переменных {Xm}, {Up} и {Uk} отображается через обобщенные координаты объекта
Слайд 26 На качество функционирования системы мониторинга существенное
влияние оказывает шум мониторинга {Hd}, который
На качество функционирования системы мониторинга существенное влияние оказывает шум мониторинга {Hd}, который
Слайд 27Ясно, что решение о соответствующих работах с объектом мониторинга, находящимся в критическом
Ясно, что решение о соответствующих работах с объектом мониторинга, находящимся в критическом
Слайд 28Оценка ошибки системы диагностики и мониторинга
Применение стационарных систем диагностики и мониторинга
Оценка ошибки системы диагностики и мониторинга
Применение стационарных систем диагностики и мониторинга
Слайд 29Оценка ошибки системы диагностики и мониторинга
Применение стационарных систем диагностики и мониторинга
Оценка ошибки системы диагностики и мониторинга
Применение стационарных систем диагностики и мониторинга
Слайд 30Оценка ошибки системы диагностики и мониторинга
Применение стационарных систем диагностики и мониторинга
Оценка ошибки системы диагностики и мониторинга
Применение стационарных систем диагностики и мониторинга
Слайд 31Применение СДМ создает временную избыточность для действий персонала в условиях надвигающегося отказа,
Применение СДМ создает временную избыточность для действий персонала в условиях надвигающегося отказа,
Слайд 32Применение СДМ создает временную избыточность для действий персонала в условиях надвигающегося отказа,
Применение СДМ создает временную избыточность для действий персонала в условиях надвигающегося отказа,
Слайд 33б). Для того же примера интервал между производственными неполадками и аварийными ситуациями
б). Для того же примера интервал между производственными неполадками и аварийными ситуациями
Слайд 34Параметры системы мониторинга:
а)-допустимая ошибка η при требуемом риске r и фактической вероятности
Параметры системы мониторинга: а)-допустимая ошибка η при требуемом риске r и фактической вероятности
Слайд 35б)-коэффициент увеличения наработки между внезапными отказами при внедрении мониторинга и обеспечении требуемого
б)-коэффициент увеличения наработки между внезапными отказами при внедрении мониторинга и обеспечении требуемого
Слайд 36в)-коэффициент увеличения наработки между отказами в зависимости от ошибки диагностирования
в)-коэффициент увеличения наработки между отказами в зависимости от ошибки диагностирования
Слайд 37Оценки изменения диагностических признаков
При вибродиагностике нас интересуют не абсолютные координаты звеньев
Оценки изменения диагностических признаков
При вибродиагностике нас интересуют не абсолютные координаты звеньев
Слайд 38Оценки изменения диагностических признаков
При вибродиагностике нас интересуют не абсолютные координаты звеньев
Оценки изменения диагностических признаков
При вибродиагностике нас интересуют не абсолютные координаты звеньев
Слайд 39Математическая модель системы мониторинга
Чем больше погрешности или отклонения от номинального диапазона
Математическая модель системы мониторинга
Чем больше погрешности или отклонения от номинального диапазона
Слайд 40где {Sm(t)} – вектор функций старения агрегата размерности m, каждая составляющая которого
где {Sm(t)} – вектор функций старения агрегата размерности m, каждая составляющая которого
Слайд 41где {Sm(t)} – вектор функций старения агрегата размерности m, каждая составляющая которого
где {Sm(t)} – вектор функций старения агрегата размерности m, каждая составляющая которого
Слайд 42Матрицы [А], [В], [С], [D] определяются следующим образом: [m, m] –
квадратная матрица
Матрицы [А], [В], [С], [D] определяются следующим образом: [m, m] – квадратная матрица
![Матрицы [А], [В], [С], [D] определяются следующим образом: [m, m] – квадратная](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1111640/slide-41.jpg)
Слайд 43Для вибродиагностики матрица D определяет влияние на параметры вибрации
агрегата действий персонала –
Для вибродиагностики матрица D определяет влияние на параметры вибрации агрегата действий персонала –
Слайд 44Составляющие , как правило, недоступны для непосредственного наблюдения, что заставляет использовать методы
Составляющие , как правило, недоступны для непосредственного наблюдения, что заставляет использовать методы
Слайд 45Связь между приращением сигнала и приращением износа
Необходимо заметить, что размерности пространства
Связь между приращением сигнала и приращением износа
Необходимо заметить, что размерности пространства
Слайд 46Связь между приращением сигнала и приращением износа
Необходимо заметить, что размерности
Связь между приращением сигнала и приращением износа
Необходимо заметить, что размерности
Слайд 47Связь между приращением сигнала и приращением износа
Необходимо заметить, что размерности
Связь между приращением сигнала и приращением износа
Необходимо заметить, что размерности
Слайд 48Рассмотрим связь между приращением сигнала и приращением износа на
интервале между управляющими воздействиями,
Рассмотрим связь между приращением сигнала и приращением износа на интервале между управляющими воздействиями,
Слайд 49 Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
Слайд 50 Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
Соотношения (1.21)
Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
Соотношения (1.21)
Слайд 51 Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
Соотношения (1.21)
Решая (1.18)-(1.20) относительно технического состояния объекта мониторинга, получим:
Соотношения (1.21)
Слайд 52 Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга
через тренды диагностических признаков и
Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и
Слайд 53Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга
через тренды диагностических признаков и их
Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их
Слайд 54Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга
через тренды диагностических признаков и их
Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их
Слайд 55Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга
через тренды диагностических признаков и их
Уравнения (1.21)-(1.22) полностью определяют состояние объекта мониторинга через тренды диагностических признаков и их
 Праздничная линейка, посвященная Дню Знаний
Праздничная линейка, посвященная Дню Знаний Новые подходы к организации повышения педагогического мастерства учителей округа
Новые подходы к организации повышения педагогического мастерства учителей округа The future perfect
The future perfect  Презентация на тему СПЕКТР ЭЛЕКТРОМАГНИТНЫХ ВОЛН
Презентация на тему СПЕКТР ЭЛЕКТРОМАГНИТНЫХ ВОЛН  Le Petit Prince
Le Petit Prince НИРС. Портфолио
НИРС. Портфолио АнтиВирус. Серия средств для рук с антибактериальным эффектом
АнтиВирус. Серия средств для рук с антибактериальным эффектом Браслет Летнее настроение
Браслет Летнее настроение Презентация о презентации
Презентация о презентации Казахстан без насилия в семье
Казахстан без насилия в семье Дисперсия света (11 класс)
Дисперсия света (11 класс) Евгений Онегин и Анна Снегина
Евгений Онегин и Анна Снегина Группа компаний «МАГНОЛИЯ»
Группа компаний «МАГНОЛИЯ» Дмитрий Николаевич Ушаков
Дмитрий Николаевич Ушаков Театральный занавес
Театральный занавес Презентация на тему Пульсары
Презентация на тему Пульсары 1
1 Фехтование. Спортивное фехтование
Фехтование. Спортивное фехтование ЭКОВАТА ЖИВОЕ ТЕПЛО ВАШЕГО ДОМА
ЭКОВАТА ЖИВОЕ ТЕПЛО ВАШЕГО ДОМА Опалубка. Технология производства опалубочных работ. (Лекция 7)
Опалубка. Технология производства опалубочных работ. (Лекция 7) Feedback
Feedback Релейная защита
Релейная защита Живая оболочка Земли
Живая оболочка Земли Факторы территориальной организации хозяйства
Факторы территориальной организации хозяйства Река Амазонка
Река Амазонка Яркие представители архитектуры стиля Ампир
Яркие представители архитектуры стиля Ампир Архитектура Андроид-приложения
Архитектура Андроид-приложения Вставка изображения (из коллекции и из файла) в документ Word
Вставка изображения (из коллекции и из файла) в документ Word