- Prezentatsia_SARU_lektsia_TAU__1

Содержание
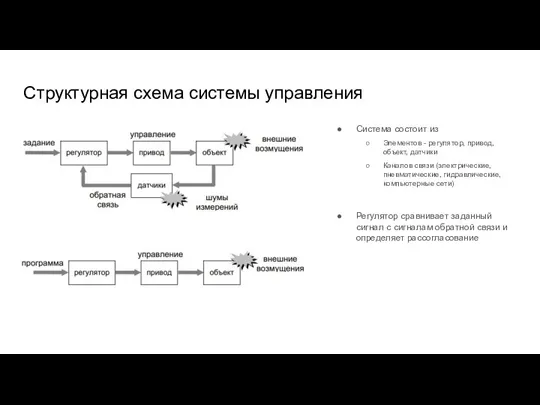
- 2. Структурная схема системы управления Система состоит из Элементов - регулятор, привод, объект, датчики Каналов связи (электрические,
- 3. Задачи управления Автоматические системы управления применяются для решения трех типов задач: стабилизация, то есть поддержание заданного
- 4. Классификация систем управления По количеству входов и выходов: одномерные системы (имеющие один вход и один выход)
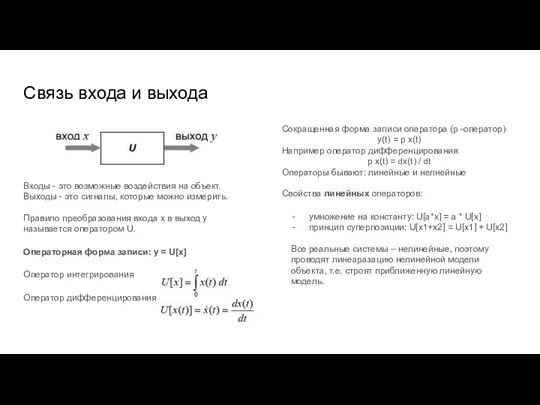
- 5. Связь входа и выхода Входы - это возможные воздействия на объект. Выходы - это сигналы, которые
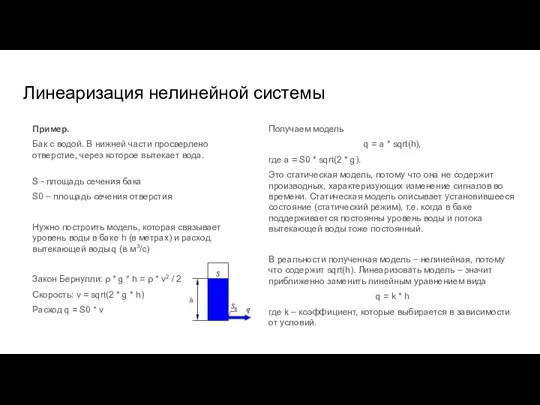
- 6. Линеаризация нелинейной системы Пример. Бак с водой. В нижней части просверлено отверстие, через которое вытекает вода.
- 7. … продолжение примера
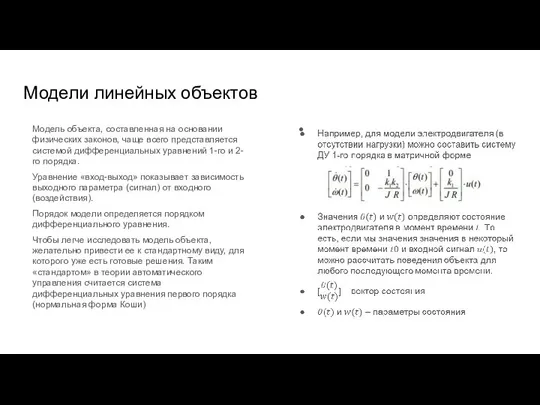
- 8. Модели линейных объектов Модель объекта, составленная на основании физических законов, чаще всего представляется системой дифференциальных уравнений
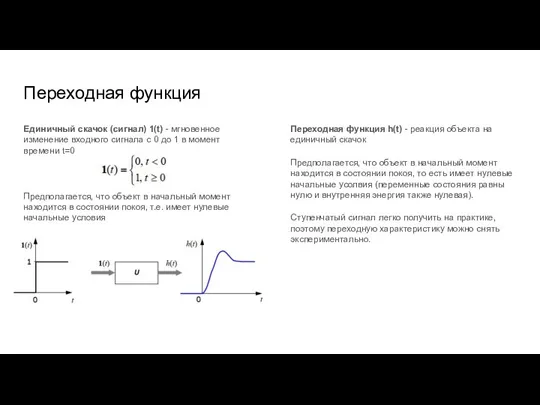
- 10. Переходная функция Единичный скачок (сигнал) 1(t) - мгновенное изменение входного сигнала с 0 до 1 в
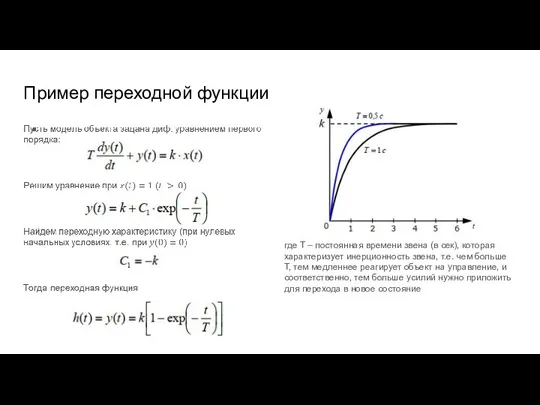
- 11. Пример переходной функции где Т – постоянная времени звена (в сек), которая характеризует инерционность звена, т.е.
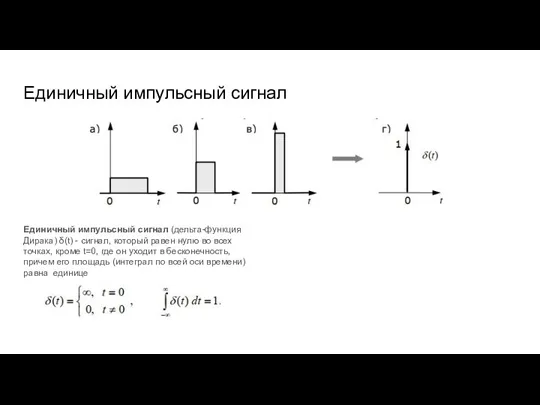
- 12. Единичный импульсный сигнал Единичный импульсный сигнал (дельта-функция Дирака) δ(t) - сигнал, который равен нулю во всех
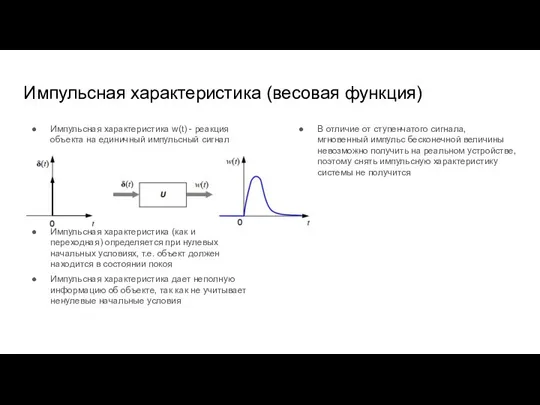
- 13. Импульсная характеристика (весовая функция) Импульсная характеристика w(t) - реакция объекта на единичный импульсный сигнал Импульсная характеристика
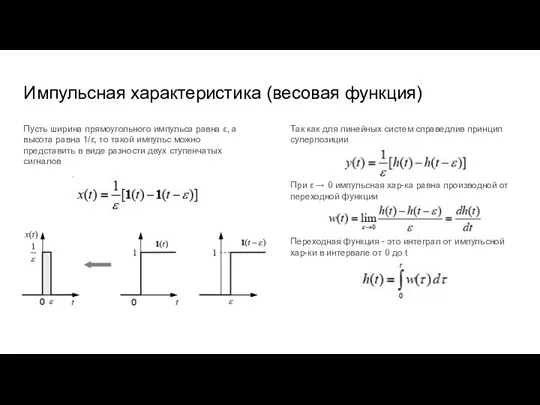
- 14. Импульсная характеристика (весовая функция) Пусть ширина прямоугольного импульса равна ε, а высота равна 1/ε, то такой
- 15. Пример. Импульсная характеристика Ранее рассмотренная переходная функция для модели, заданной диф. уравнением 1 порядка Дифференцируя переходную
- 16. Передаточная функция Пусть модель задана линейным диф. уравнением 2-го порядка Введем оператор дифференцирования С учетом оператора
- 17. Правильная передаточная функция - если степень ее числителя не больше, чем степень знаменателя. Строго правильная передаточная
- 18. Преобразование Лапласа Результатом обратного преобразования Лапласа является оригинал функции Например
- 19. Свойства преобразования Лапласа 1. Принцип суперпозиции выполняется как для прямого, так и для обратного преобразования Лапласа
- 20. Передаточная функция после преобразования Лапласа
- 21. Пример
- 22. Пример (продолжение)
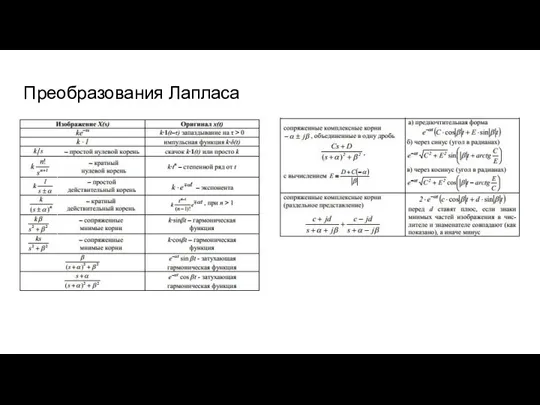
- 23. Преобразования Лапласа
- 25. Пример Исходные данные: Объект управления описывается уравнением: На вход поступает сигнал x(t) = 1(t) Найти: выходной
- 26. Начальное и конечное значения функции y(t) При ступенчатом входном сигнале 1(t) X(s) = 1 / s
- 27. Частотные характеристики Еще один эталонный сигнал - гармонический x(t) = sin(ω*t) При таком входе на выходе
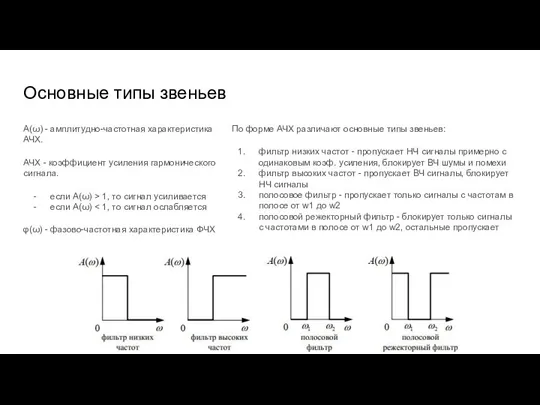
- 28. Основные типы звеньев A(ω) - амплитудно-частотная характеристика АЧХ. АЧХ - коэффициент усиления гармонического сигнала. если A(ω)
- 29. Логарифмические частотные характеристики Вместо A(ω) было предложено использовать логарифмическую амплитудную частотную характеристику (ЛАЧХ): график, на котором
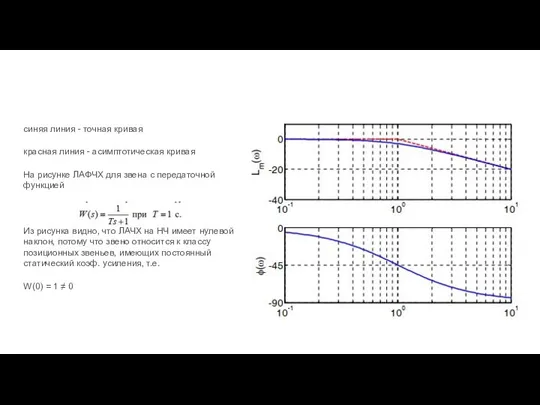
- 30. синяя линия - точная кривая красная линия - асимптотическая кривая На рисунке ЛАФЧХ для звена с
- 31. Если W(0) = 0, передаточная функция содержит множитель s^k (k > 0). В это случае наклон
- 32. Типовые динамические звенья. Усилитель Звенья, имеющие конечный коэф. усиления постоянного сигнала, т.е. W(0) = k ≠
- 33. Апериодическое звено Самое часто встречающееся звено - апериодическое, описывается диф. уравнением Передаточная функция k - безразмерный
- 34. Апериодическое звено (продолжение) Частотная характеристика На комплексной плоскости при изменении частоты ω от 0 до ∞
- 35. Неустойчивое апериодическое звено Такое звено задается уравнением При T > 0 выражения exp(t/T) бесконечно возрастает с
- 36. Колебательное звено Звено имеет передаточную функцию при условии, что знаменатель имеет комплексно-сопряженные корни, т.е. Передаточная функция
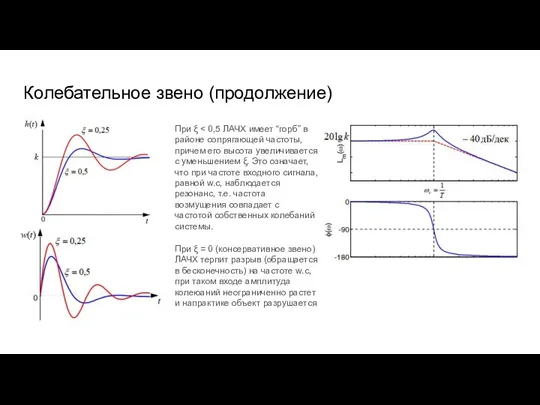
- 37. Колебательное звено (продолжение) При ξ При ξ = 0 (консервативное звено) ЛАЧХ терпит разрыв (обращается в
- 38. Интегрирующее звено Звено описывается уравнением которому соответствует передаточная функция Решение уравнения звена дает На НЧ усиление
- 39. Дифференцирующие звенья Дифференцирующее звено дает на выходе производную входного сигнала. Уравнение идеального дифференцирующего звена Операторная форма
- 40. Инерционное дифференцирующее звено Звено описывается уравнением Имеет передаточную функцию Фактические это последовательное соединение идеального дифференцирующего и
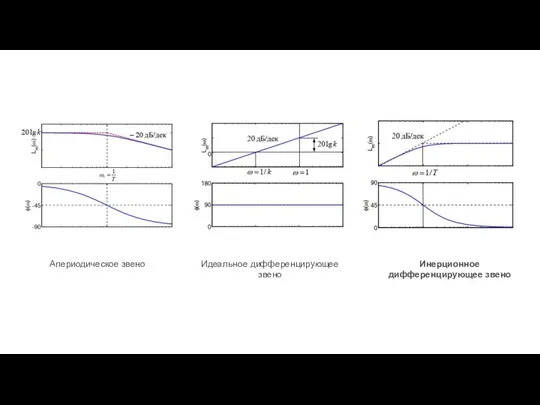
- 41. Апериодическое звено Идеальное дифференцирующее звено Инерционное дифференцирующее звено
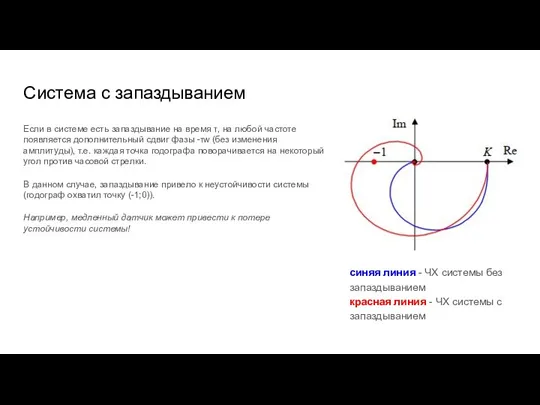
- 42. Звено запаздывания В системе есть транспортное запаздывание на величину ? (например, на рисунке ? = L
- 43. Обратные звенья Звено называется обратным W(s) (или инверсией звена), если задано передаточной функцией Найдем ЛАФЧХ обратного
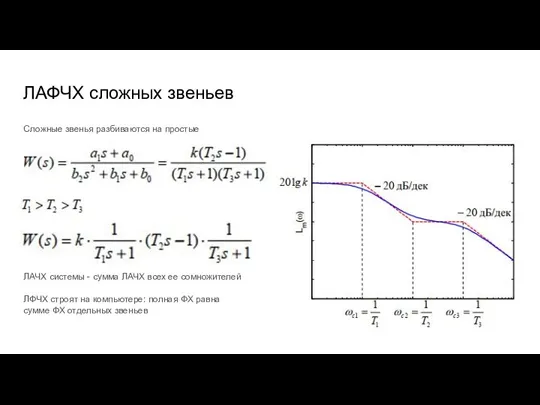
- 44. ЛАФЧХ сложных звеньев Сложные звенья разбиваются на простые ЛАЧХ системы - сумма ЛАЧХ всех ее сомножителей
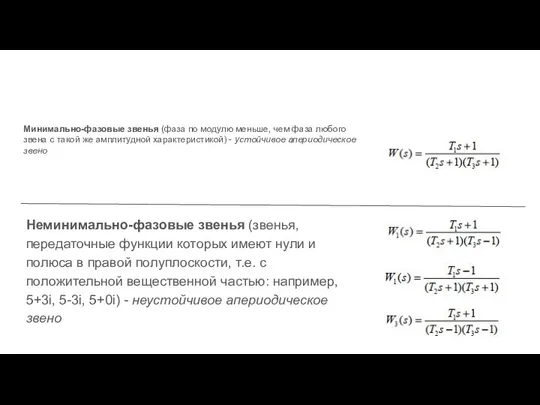
- 45. Минимально-фазовые звенья (фаза по модулю меньше, чем фаза любого звена с такой же амплитудной характеристикой) -
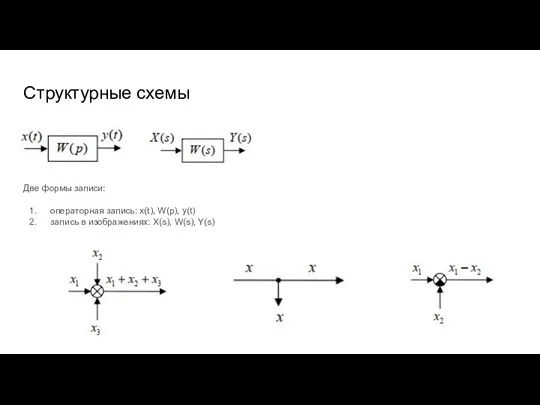
- 46. Структурные схемы Две формы записи: операторная запись: x(t), W(p), y(t) запись в изображениях: X(s), W(s), Y(s)
- 47. Типичная схема системы управления x - заданное значение y - текущее значение e=x-y - ошибка регулирования
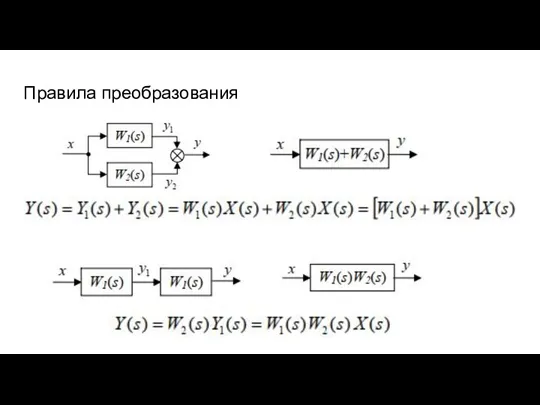
- 48. Правила преобразования
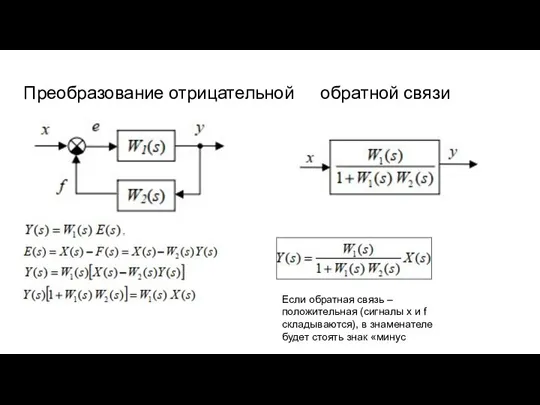
- 49. Преобразование отрицательной обратной связи Если обратная связь – положительная (сигналы x и f складываются), в знаменателе
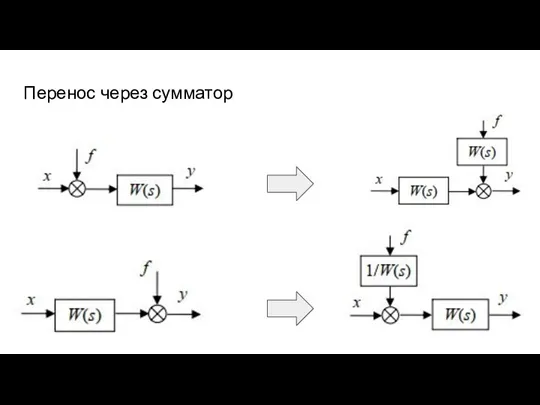
- 50. Перенос через сумматор
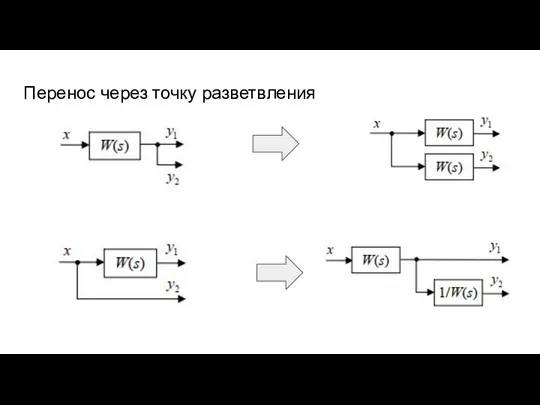
- 51. Перенос через точку разветвления
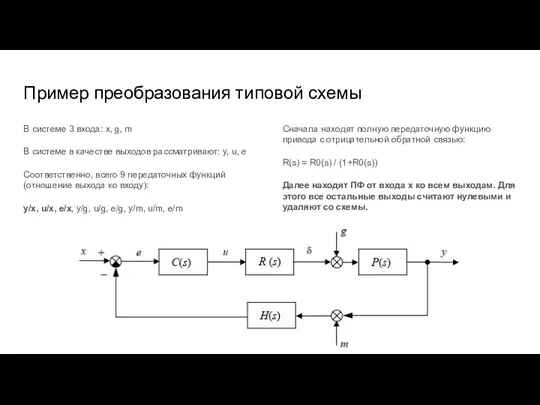
- 52. Пример преобразования типовой схемы Сначала находят полную передаточную функцию привода с отрицательной обратной связью: R(s) =
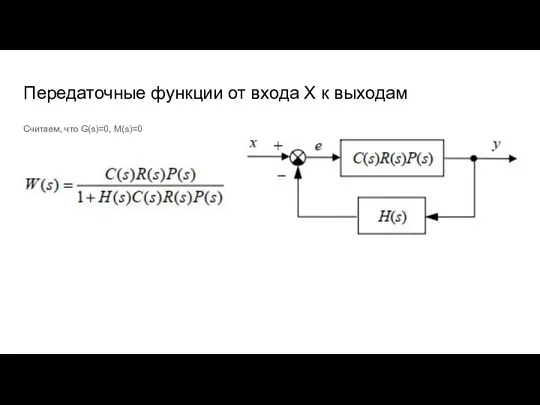
- 53. Передаточные функции от входа Х к выходам Считаем, что G(s)=0, M(s)=0
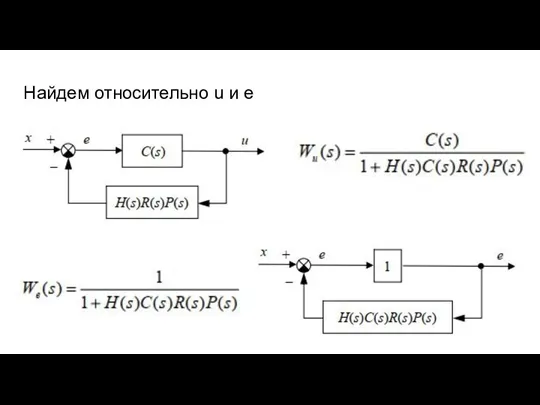
- 54. Найдем относительно u и e
- 55. Анализ систем управления
- 56. Требования к управлению Основные требования: Точность - в установившемся режиме система должна поддерживать заданное значение выхода
- 57. Процесс на выходе При нулевых начальных условиях Y(s) = W(s) * X(s), где W(s) = n.w(s)
- 58. Характеристический полином Если среди корней полинома Δ(s) есть числа с положительной вещественной частью, то сигнал выхода
- 59. Точность Точность системы оценивается для одного из эталонных сигналов. Единичный ступенчатый сигнал: Линейно-возрастающий сигнал: Гармонический сигнал
- 60. Реакция системы на 1(t) Единичный ступенчатый сигнал 1(t) имеет изображение X(s) = 1/s Сигнал ошибки определяется
- 62. Устойчивость Устойчивая система возвращается в состояние равновесия, если какая-то сила ее из этого состояния выведет А
- 63. Разновидности устойчивости устойчивость “вход-выход” - если рассматривается только выход системы при различных ограниченных входах устойчивость автономной
- 64. Устойчивость “вход-выход” Система “идет вразнос” - управляемая величина растет неограниченно при всех допустимых входных сигналах Если
- 65. Техническая устойчивость Техническая устойчивость относится к автономной системе, у которой все входные сигналы равны нулю (в
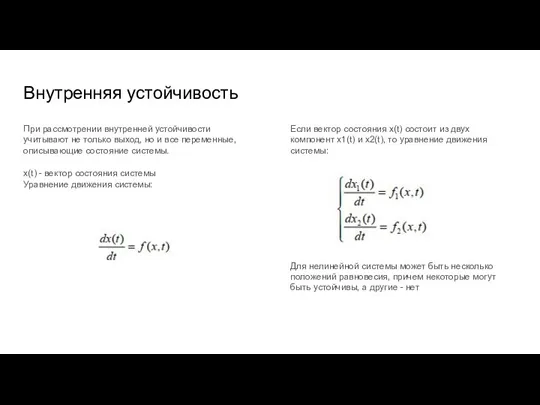
- 66. Внутренняя устойчивость При рассмотрении внутренней устойчивости учитывают не только выход, но и все переменные, описывающие состояние
- 67. Асимптотическая устойчивость x(t) - все движения системы x* - положение равновесия Устойчивость системы означает, что все
- 68. Внутренняя устойчивость (устойчивость по Ляпунову) Рассмотрим систему с одной переменной состояния x(t). Система называется устойчивой по
- 70. Устойчивость линейных систем Особенности линейных систем: автономная линейная система (на которую не действуют внешние силы) может
- 71. Примеры Рассмотрим уравнение движения линейной системы, на которую не действуют возмущения. Области устойчивости и неустойчивости на
- 72. Примеры При отсутствии внешних возмущений выход системы: Выход системы содержит постоянное слагаемое a1. Поэтому такая система
- 73. Примеры Допустим, что характеристический полином Δ(s) имеет две мнимых корня: α1 = 0 + j*w и
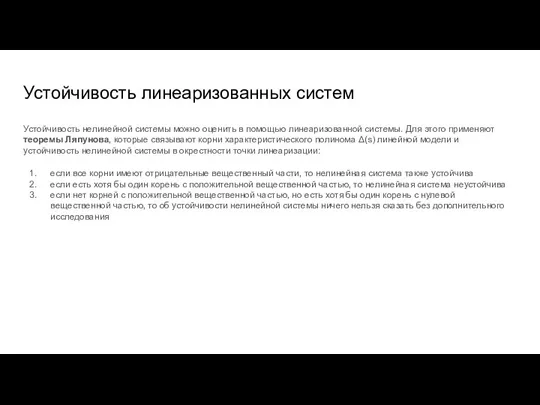
- 74. Устойчивость линеаризованных систем Устойчивость нелинейной системы можно оценить в помощью линеаризованной системы. Для этого применяют теоремы
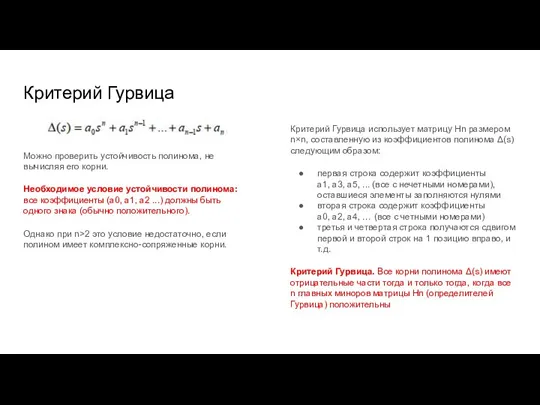
- 75. Критерий Гурвица Можно проверить устойчивость полинома, не вычисляя его корни. Необходимое условие устойчивости полинома: все коэффициенты
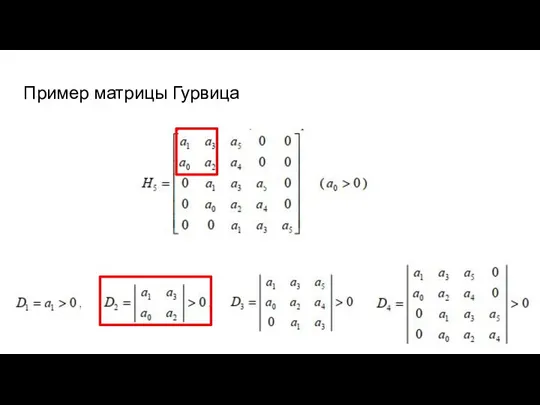
- 76. Пример матрицы Гурвица
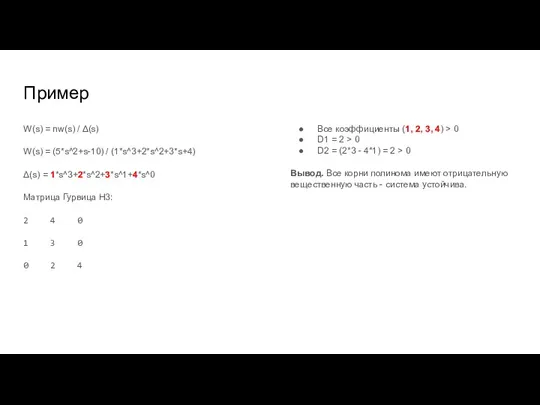
- 77. Пример W(s) = nw(s) / Δ(s) W(s) = (5*s^2+s-10) / (1*s^3+2*s^2+3*s+4) Δ(s) = 1*s^3+2*s^2+3*s^1+4*s^0 Матрица Гурвица
- 78. Правило: Для матрицы 3×3 значение определителя равно сумме произведений элементов главной диагонали и произведений элементов лежащих
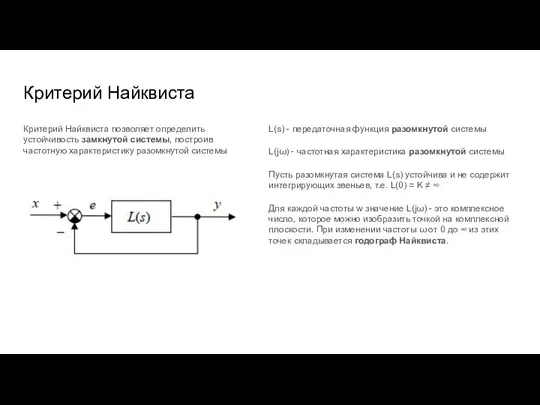
- 79. Критерий Найквиста Критерий Найквиста позволяет определить устойчивость замкнутой системы, построив частотную характеристику разомкнутой системы L(s) -
- 80. Годограф Найквиста Годограф Найквиста - кривая, которая начинается в точке (K; 0) на вещественной оси и
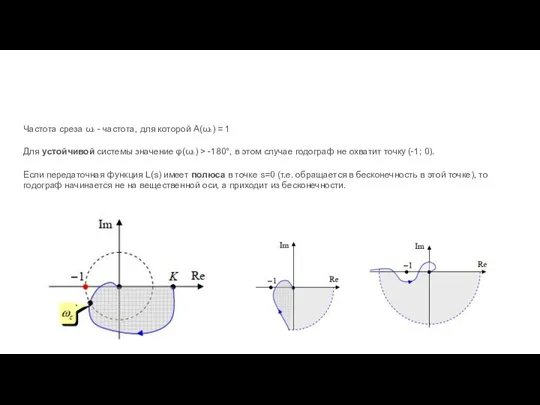
- 81. Частота среза ωc - частота, для которой A(ωc) = 1 Для устойчивой системы значение φ(ωc) >
- 82. Система с запаздыванием Если в системе есть запаздывание на время τ, на любой частоте появляется дополнительный
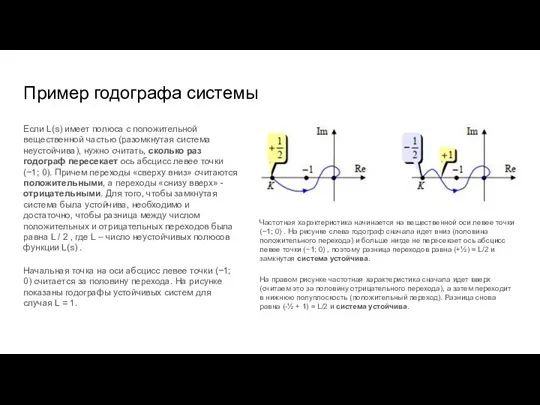
- 83. Пример годографа системы Если L(s) имеет полюса с положительной вещественной частью (разомкнутая система неустойчива), нужно считать,
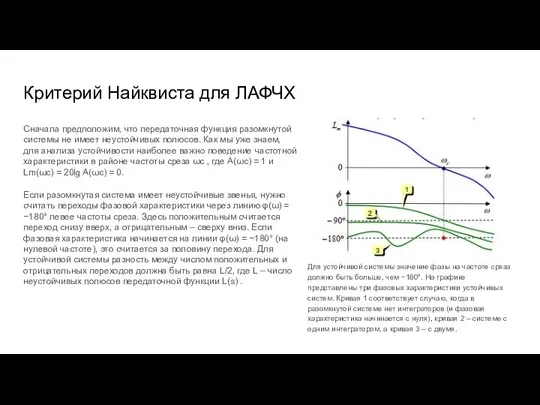
- 84. Критерий Найквиста для ЛАФЧХ Сначала предположим, что передаточная функция разомкнутой системы не имеет неустойчивых полюсов. Как
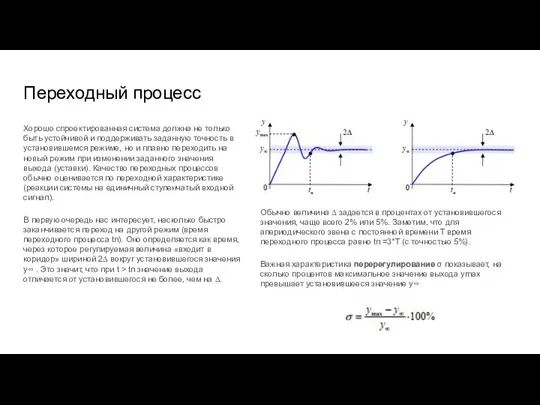
- 85. Переходный процесс Хорошо спроектированная система должна не только быть устойчивой и поддерживать заданную точность в установившемся
- 86. Устойчивость линейной системы определяется полюсами ее передаточной функции W(s), однако на переходные процесс влияют и нули,
- 87. Частотные оценки качества Качество системы можно оценивать не только во временнóй области (переходный процесс во времени),
- 88. Запасы устойчивости по амплитуде Обычно рассматривают запасы устойчивости по амплитуде и по фазе. Запас устойчивости по
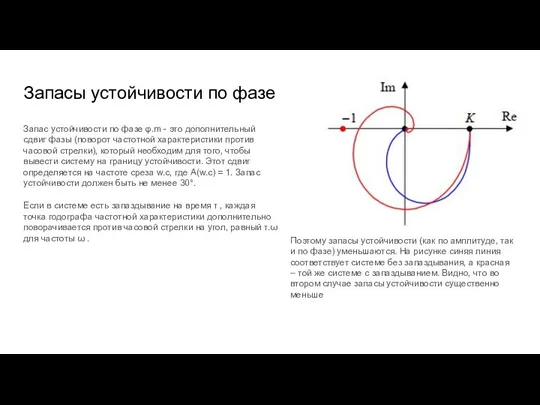
- 89. Запасы устойчивости по фазе Запас устойчивости по фазе φ.m - это дополнительный сдвиг фазы (поворот частотной
- 90. Запасы устойчивости по ЛЧХ Заметим, что запас по амплитуде может быть равен бесконечности, если фазовая характеристика
- 91. Кратчайшее расстояние от годографа до точки (-1;0) К сожалению, в некоторых случаях классические запасы устойчивости (по
- 92. Показатель колебательности Аналогичная характеристика называется показателем колебательности M. Она определяется по амплитудной частотной характеристике замкнутой системы
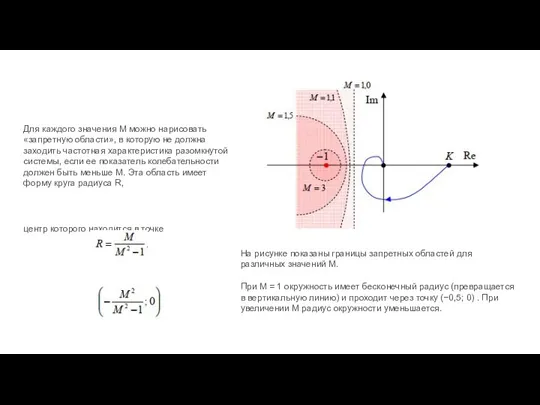
- 93. Для каждого значения M можно нарисовать «запретную области», в которую не должна заходить частотная характеристика разомкнутой
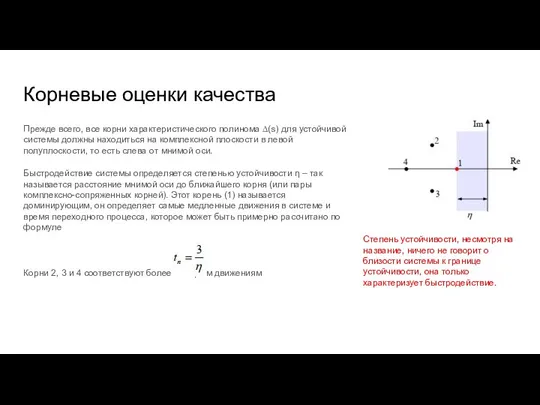
- 94. Корневые оценки качества Прежде всего, все корни характеристического полинома ∆(s) для устойчивой системы должны находиться на
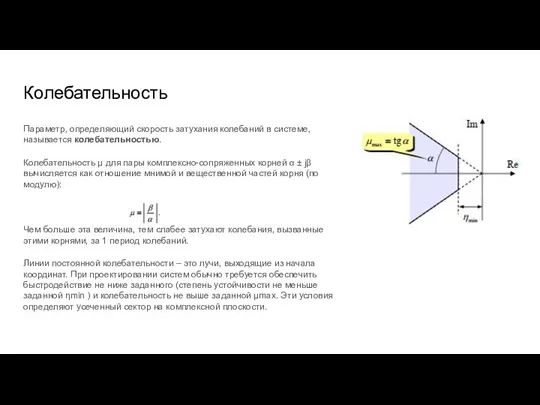
- 95. Колебательность Параметр, определяющий скорость затухания колебаний в системе, называется колебательностью. Колебательность µ для пары комплексно-сопряженных корней
- 96. Робастность Робастность (грубость) - свойство, которое определяет нечувствительность к малым ошибкам моделирования объекта и возмущений. Задачи,
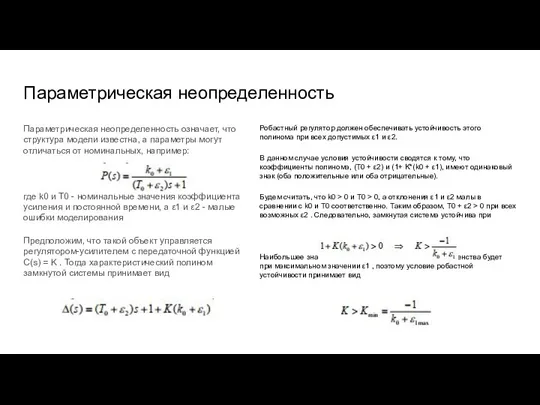
- 97. Параметрическая неопределенность Параметрическая неопределенность означает, что структура модели известна, а параметры могут отличаться от номинальных, например:
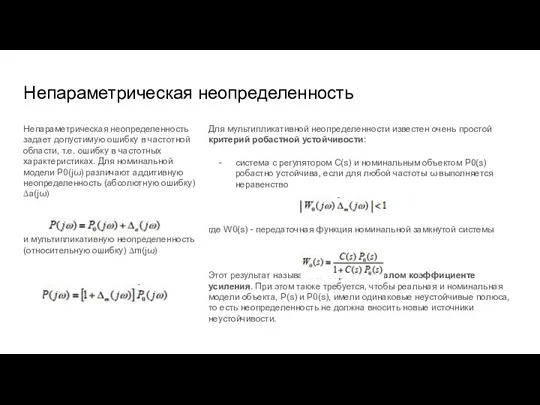
- 98. Непараметрическая неопределенность Непараметрическая неопределенность задает допустимую ошибку в частотной области, т.е. ошибку в частотных характеристиках. Для
- 100. Скачать презентацию
Слайд 2Структурная схема системы управления
Система состоит из
Элементов - регулятор, привод, объект, датчики
Каналов связи
Структурная схема системы управления
Система состоит из
Элементов - регулятор, привод, объект, датчики
Каналов связи
Слайд 3Задачи управления
Автоматические системы управления применяются для решения трех типов задач:
стабилизация, то есть
Задачи управления
Автоматические системы управления применяются для решения трех типов задач:
стабилизация, то есть
Слайд 4Классификация систем управления
По количеству входов и выходов:
одномерные системы (имеющие один вход и
Классификация систем управления
По количеству входов и выходов:
одномерные системы (имеющие один вход и
Слайд 5Связь входа и выхода
Входы - это возможные воздействия на объект.
Выходы - это
Связь входа и выхода
Входы - это возможные воздействия на объект. Выходы - это
Слайд 6Линеаризация нелинейной системы
Пример.
Бак с водой. В нижней части просверлено отверстие, через которое
Линеаризация нелинейной системы
Пример.
Бак с водой. В нижней части просверлено отверстие, через которое
Слайд 7… продолжение примера
… продолжение примера
Слайд 8Модели линейных объектов
Модель объекта, составленная на основании физических законов, чаще всего представляется
Модели линейных объектов
Модель объекта, составленная на основании физических законов, чаще всего представляется

Слайд 10Переходная функция
Единичный скачок (сигнал) 1(t) - мгновенное изменение входного сигнала с 0
Переходная функция
Единичный скачок (сигнал) 1(t) - мгновенное изменение входного сигнала с 0
Слайд 11Пример переходной функции
где Т – постоянная времени звена (в сек), которая характеризует
Пример переходной функции
где Т – постоянная времени звена (в сек), которая характеризует
Слайд 12Единичный импульсный сигнал
Единичный импульсный сигнал (дельта-функция Дирака) δ(t) - сигнал, который равен
Единичный импульсный сигнал
Единичный импульсный сигнал (дельта-функция Дирака) δ(t) - сигнал, который равен
Слайд 13Импульсная характеристика (весовая функция)
Импульсная характеристика w(t) - реакция объекта на единичный импульсный
Импульсная характеристика (весовая функция)
Импульсная характеристика w(t) - реакция объекта на единичный импульсный
Слайд 14Импульсная характеристика (весовая функция)
Пусть ширина прямоугольного импульса равна ε, а высота равна
Импульсная характеристика (весовая функция)
Пусть ширина прямоугольного импульса равна ε, а высота равна
Слайд 15Пример. Импульсная характеристика
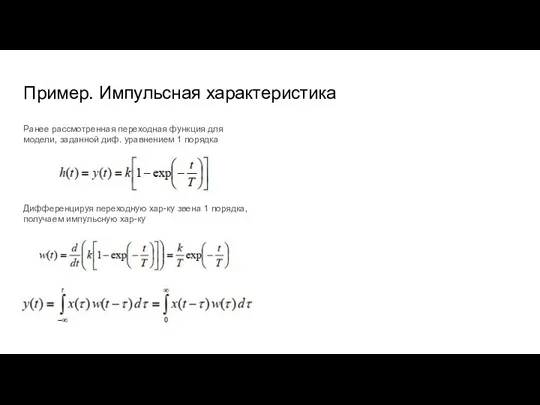
Ранее рассмотренная переходная функция для модели, заданной диф. уравнением 1
Пример. Импульсная характеристика
Ранее рассмотренная переходная функция для модели, заданной диф. уравнением 1
Слайд 16Передаточная функция
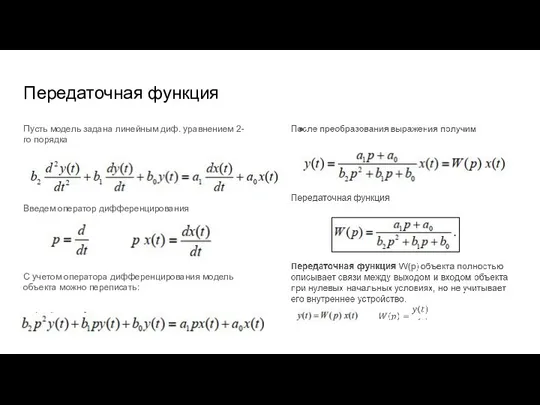
Пусть модель задана линейным диф. уравнением 2-го порядка
Введем оператор дифференцирования
С учетом
Передаточная функция
Пусть модель задана линейным диф. уравнением 2-го порядка
Введем оператор дифференцирования
С учетом
Слайд 17Правильная передаточная функция - если степень ее числителя не больше, чем степень
Правильная передаточная функция - если степень ее числителя не больше, чем степень

Слайд 18Преобразование Лапласа
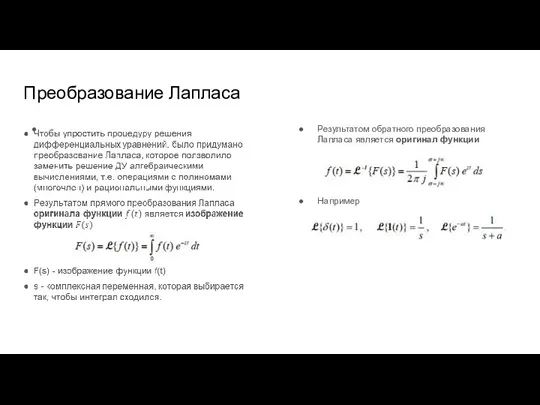
Результатом обратного преобразования Лапласа является оригинал функции
Например
Преобразование Лапласа
Результатом обратного преобразования Лапласа является оригинал функции
Например
Слайд 19Свойства преобразования Лапласа
1. Принцип суперпозиции выполняется как для прямого, так и для
Свойства преобразования Лапласа
1. Принцип суперпозиции выполняется как для прямого, так и для

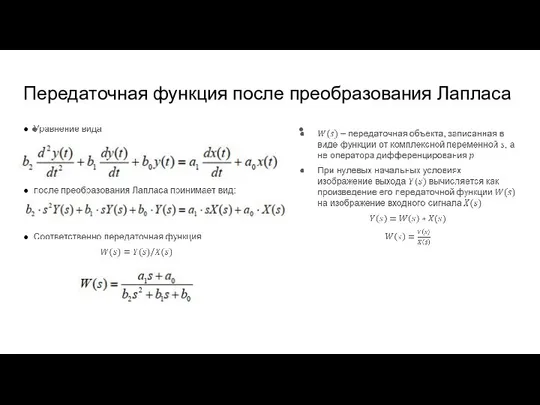
Слайд 20Передаточная функция после преобразования Лапласа
Передаточная функция после преобразования Лапласа
Слайд 21Пример
Пример

Слайд 22Пример (продолжение)
Пример (продолжение)

Слайд 23Преобразования Лапласа
Преобразования Лапласа

Слайд 25Пример
Исходные данные:
Объект управления описывается уравнением:
На вход поступает сигнал x(t) = 1(t)
Найти: выходной
Пример
Исходные данные:
Объект управления описывается уравнением:
На вход поступает сигнал x(t) = 1(t)
Найти: выходной

Слайд 26Начальное и конечное значения функции y(t)
При ступенчатом входном сигнале 1(t)
X(s) = 1
Начальное и конечное значения функции y(t)
При ступенчатом входном сигнале 1(t)
X(s) = 1

Слайд 27Частотные характеристики
Еще один эталонный сигнал - гармонический
x(t) = sin(ω*t)
При таком входе на
Частотные характеристики
Еще один эталонный сигнал - гармонический
x(t) = sin(ω*t)
При таком входе на

Слайд 28Основные типы звеньев
A(ω) - амплитудно-частотная характеристика АЧХ.
АЧХ - коэффициент усиления гармонического сигнала.
если
Основные типы звеньев
A(ω) - амплитудно-частотная характеристика АЧХ.
АЧХ - коэффициент усиления гармонического сигнала.
если
Слайд 29Логарифмические частотные характеристики
Вместо A(ω) было предложено использовать логарифмическую амплитудную частотную характеристику (ЛАЧХ):
график,
Логарифмические частотные характеристики
Вместо A(ω) было предложено использовать логарифмическую амплитудную частотную характеристику (ЛАЧХ):
график,
Слайд 30синяя линия - точная кривая
красная линия - асимптотическая кривая
На рисунке ЛАФЧХ для
синяя линия - точная кривая
красная линия - асимптотическая кривая
На рисунке ЛАФЧХ для
Слайд 31Если W(0) = 0, передаточная функция содержит множитель s^k (k > 0).
Если W(0) = 0, передаточная функция содержит множитель s^k (k > 0).

Слайд 32Типовые динамические звенья. Усилитель
Звенья, имеющие конечный коэф. усиления постоянного сигнала, т.е. W(0)
Типовые динамические звенья. Усилитель
Звенья, имеющие конечный коэф. усиления постоянного сигнала, т.е. W(0)
Слайд 33Апериодическое звено
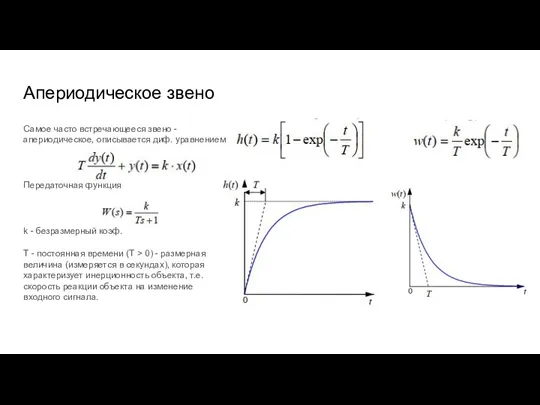
Самое часто встречающееся звено - апериодическое, описывается диф. уравнением
Передаточная функция
k -
Апериодическое звено
Самое часто встречающееся звено - апериодическое, описывается диф. уравнением
Передаточная функция
k -
Слайд 34Апериодическое звено (продолжение)
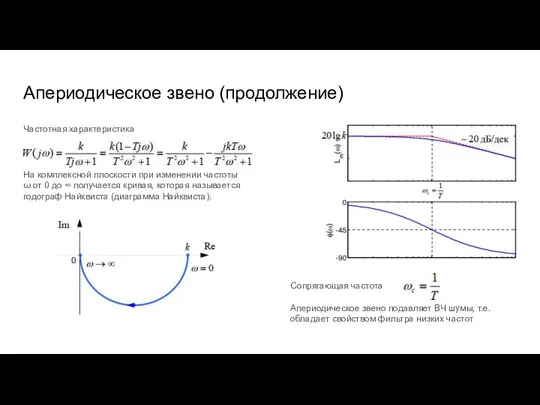
Частотная характеристика
На комплексной плоскости при изменении частоты ω от 0
Апериодическое звено (продолжение)
Частотная характеристика
На комплексной плоскости при изменении частоты ω от 0
Слайд 35Неустойчивое апериодическое звено
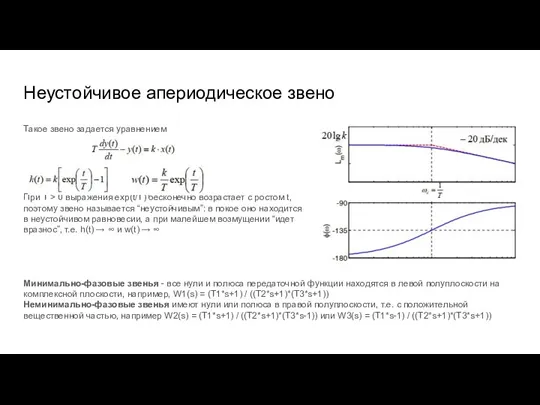
Такое звено задается уравнением
При T > 0 выражения exp(t/T) бесконечно
Неустойчивое апериодическое звено
Такое звено задается уравнением
При T > 0 выражения exp(t/T) бесконечно
Слайд 36Колебательное звено
Звено имеет передаточную функцию
при условии, что знаменатель имеет комплексно-сопряженные корни,
Колебательное звено
Звено имеет передаточную функцию
при условии, что знаменатель имеет комплексно-сопряженные корни,

Слайд 37Колебательное звено (продолжение)
При ξ < 0,5 ЛАЧХ имеет “горб” в районе сопрягающей
Колебательное звено (продолжение)
При ξ < 0,5 ЛАЧХ имеет “горб” в районе сопрягающей
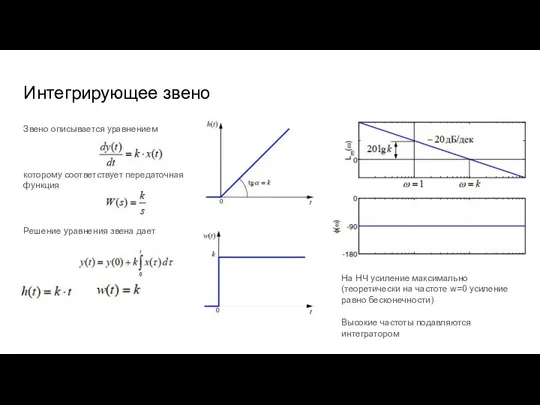
Слайд 38Интегрирующее звено
Звено описывается уравнением
которому соответствует передаточная функция
Решение уравнения звена дает
На НЧ усиление
Интегрирующее звено
Звено описывается уравнением
которому соответствует передаточная функция
Решение уравнения звена дает
На НЧ усиление
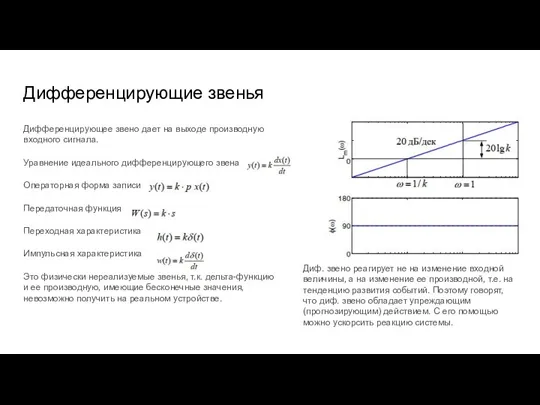
Слайд 39Дифференцирующие звенья
Дифференцирующее звено дает на выходе производную входного сигнала.
Уравнение идеального дифференцирующего звена
Операторная
Дифференцирующие звенья
Дифференцирующее звено дает на выходе производную входного сигнала.
Уравнение идеального дифференцирующего звена
Операторная
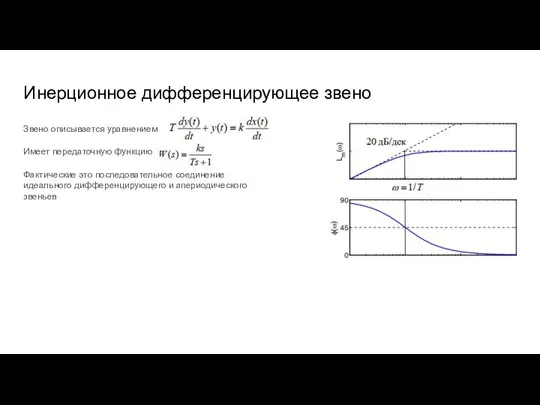
Слайд 40Инерционное дифференцирующее звено
Звено описывается уравнением
Имеет передаточную функцию
Фактические это последовательное соединение идеального
Инерционное дифференцирующее звено
Звено описывается уравнением
Имеет передаточную функцию
Фактические это последовательное соединение идеального
Слайд 41Апериодическое звено
Идеальное дифференцирующее звено
Инерционное дифференцирующее звено
Апериодическое звено
Идеальное дифференцирующее звено
Инерционное дифференцирующее звено
Слайд 42Звено запаздывания
В системе есть транспортное запаздывание на величину ? (например, на рисунке
Звено запаздывания
В системе есть транспортное запаздывание на величину ? (например, на рисунке

Слайд 43Обратные звенья
Звено называется обратным W(s) (или инверсией звена), если задано передаточной функцией
Найдем
Обратные звенья
Звено называется обратным W(s) (или инверсией звена), если задано передаточной функцией
Найдем

Слайд 44ЛАФЧХ сложных звеньев
Сложные звенья разбиваются на простые
ЛАЧХ системы - сумма ЛАЧХ всех
ЛАФЧХ сложных звеньев
Сложные звенья разбиваются на простые
ЛАЧХ системы - сумма ЛАЧХ всех
Слайд 45Минимально-фазовые звенья (фаза по модулю меньше, чем фаза любого звена с такой
Минимально-фазовые звенья (фаза по модулю меньше, чем фаза любого звена с такой
Слайд 46Структурные схемы
Две формы записи:
операторная запись: x(t), W(p), y(t)
запись в изображениях: X(s), W(s),
Структурные схемы
Две формы записи:
операторная запись: x(t), W(p), y(t)
запись в изображениях: X(s), W(s),
Слайд 47Типичная схема системы управления
x - заданное значение
y - текущее значение
e=x-y - ошибка
Типичная схема системы управления
x - заданное значение y - текущее значение e=x-y - ошибка

Слайд 48Правила преобразования
Правила преобразования
Слайд 49Преобразование отрицательной обратной связи
Если обратная связь – положительная (сигналы x и f складываются),
Преобразование отрицательной обратной связи
Если обратная связь – положительная (сигналы x и f складываются),
Слайд 50Перенос через сумматор
Перенос через сумматор
Слайд 51Перенос через точку разветвления
Перенос через точку разветвления
Слайд 52Пример преобразования типовой схемы
Сначала находят полную передаточную функцию привода с отрицательной обратной
Пример преобразования типовой схемы
Сначала находят полную передаточную функцию привода с отрицательной обратной
Слайд 53Передаточные функции от входа Х к выходам
Считаем, что G(s)=0, M(s)=0
Передаточные функции от входа Х к выходам
Считаем, что G(s)=0, M(s)=0
Слайд 54Найдем относительно u и e
Найдем относительно u и e
Слайд 55Анализ систем управления
Анализ систем управления
Слайд 56Требования к управлению
Основные требования:
Точность - в установившемся режиме система должна поддерживать заданное
Требования к управлению
Основные требования:
Точность - в установившемся режиме система должна поддерживать заданное
Слайд 57Процесс на выходе
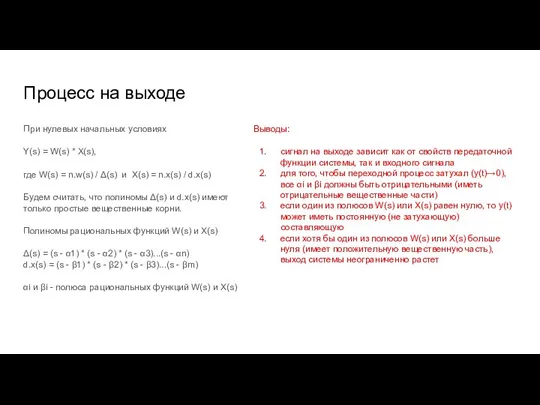
При нулевых начальных условиях
Y(s) = W(s) * X(s),
где W(s)
Процесс на выходе
При нулевых начальных условиях
Y(s) = W(s) * X(s),
где W(s)
Слайд 58Характеристический полином
Если среди корней полинома Δ(s) есть числа с положительной вещественной частью,
Характеристический полином
Если среди корней полинома Δ(s) есть числа с положительной вещественной частью,
Слайд 59Точность
Точность системы оценивается для одного из эталонных сигналов.
Единичный ступенчатый сигнал:
Линейно-возрастающий сигнал:
Гармонический сигнал
Точность
Точность системы оценивается для одного из эталонных сигналов.
Единичный ступенчатый сигнал:
Линейно-возрастающий сигнал:
Гармонический сигнал

Слайд 60Реакция системы на 1(t)
Единичный ступенчатый сигнал 1(t) имеет изображение X(s) = 1/s
Сигнал
Реакция системы на 1(t)
Единичный ступенчатый сигнал 1(t) имеет изображение X(s) = 1/s
Сигнал


Слайд 62Устойчивость
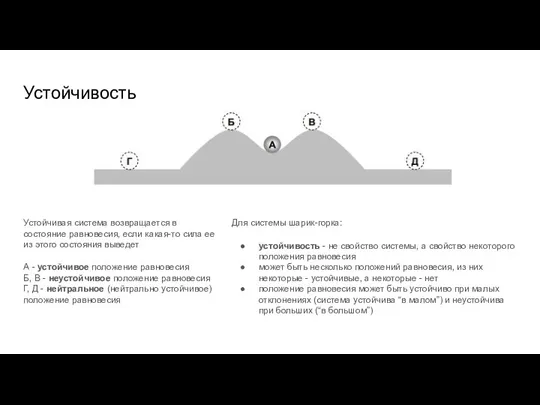
Устойчивая система возвращается в состояние равновесия, если какая-то сила ее из этого
Устойчивость
Устойчивая система возвращается в состояние равновесия, если какая-то сила ее из этого
Слайд 63Разновидности устойчивости
устойчивость “вход-выход” - если рассматривается только выход системы при различных ограниченных
Разновидности устойчивости
устойчивость “вход-выход” - если рассматривается только выход системы при различных ограниченных
Слайд 64Устойчивость “вход-выход”
Система “идет вразнос” - управляемая величина растет неограниченно при всех допустимых
Устойчивость “вход-выход”
Система “идет вразнос” - управляемая величина растет неограниченно при всех допустимых
Слайд 65Техническая устойчивость
Техническая устойчивость относится к автономной системе, у которой все входные сигналы
Техническая устойчивость
Техническая устойчивость относится к автономной системе, у которой все входные сигналы
Слайд 66Внутренняя устойчивость
При рассмотрении внутренней устойчивости учитывают не только выход, но и все
Внутренняя устойчивость
При рассмотрении внутренней устойчивости учитывают не только выход, но и все
Слайд 67Асимптотическая устойчивость
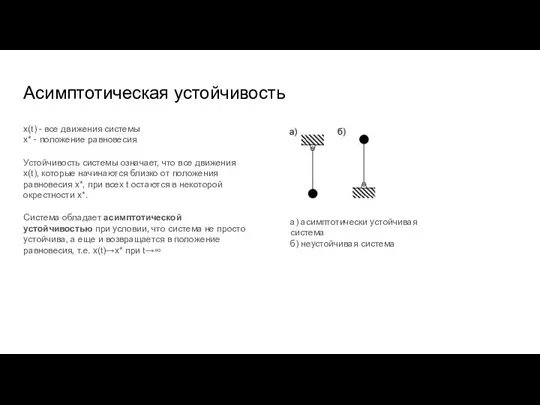
x(t) - все движения системы
x* - положение равновесия
Устойчивость системы означает, что
Асимптотическая устойчивость
x(t) - все движения системы
x* - положение равновесия
Устойчивость системы означает, что
Слайд 68Внутренняя устойчивость (устойчивость по Ляпунову)
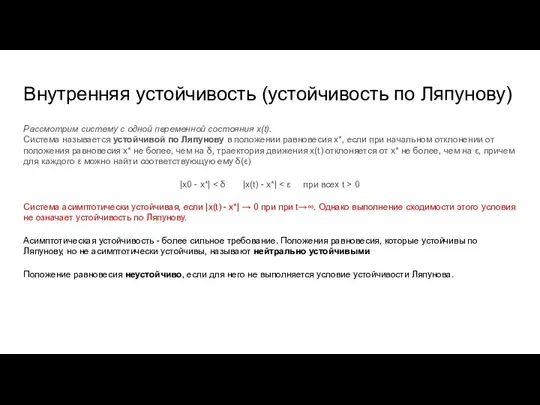
Рассмотрим систему с одной переменной состояния x(t).
Система
Внутренняя устойчивость (устойчивость по Ляпунову)
Рассмотрим систему с одной переменной состояния x(t). Система

Слайд 70Устойчивость линейных систем
Особенности линейных систем:
автономная линейная система (на которую не действуют внешние
Устойчивость линейных систем
Особенности линейных систем:
автономная линейная система (на которую не действуют внешние
Слайд 71Примеры
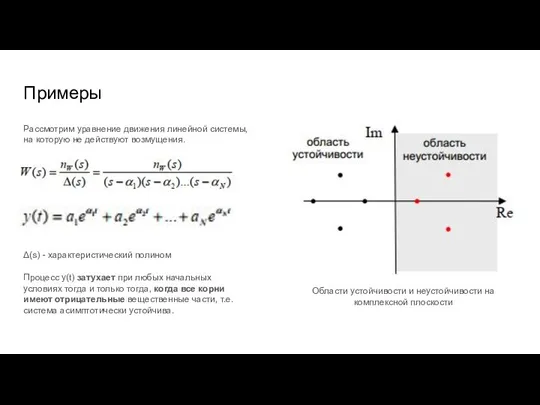
Рассмотрим уравнение движения линейной системы, на которую не действуют возмущения.
Области устойчивости и
Примеры
Рассмотрим уравнение движения линейной системы, на которую не действуют возмущения.
Области устойчивости и
Слайд 72Примеры
При отсутствии внешних возмущений выход системы:
Выход системы содержит постоянное слагаемое a1. Поэтому
Примеры
При отсутствии внешних возмущений выход системы:
Выход системы содержит постоянное слагаемое a1. Поэтому

Слайд 73Примеры
Допустим, что характеристический полином Δ(s) имеет две мнимых корня: α1 = 0
Примеры
Допустим, что характеристический полином Δ(s) имеет две мнимых корня: α1 = 0

Слайд 74Устойчивость линеаризованных систем
Устойчивость нелинейной системы можно оценить в помощью линеаризованной системы. Для
Устойчивость линеаризованных систем
Устойчивость нелинейной системы можно оценить в помощью линеаризованной системы. Для
Слайд 75Критерий Гурвица
Можно проверить устойчивость полинома, не вычисляя его корни.
Необходимое условие устойчивости полинома:
Критерий Гурвица
Можно проверить устойчивость полинома, не вычисляя его корни.
Необходимое условие устойчивости полинома:
Слайд 76Пример матрицы Гурвица
Пример матрицы Гурвица
Слайд 77Пример
W(s) = nw(s) / Δ(s)
W(s) = (5*s^2+s-10) / (1*s^3+2*s^2+3*s+4)
Δ(s) = 1*s^3+2*s^2+3*s^1+4*s^0
Матрица Гурвица
Пример
W(s) = nw(s) / Δ(s)
W(s) = (5*s^2+s-10) / (1*s^3+2*s^2+3*s+4)
Δ(s) = 1*s^3+2*s^2+3*s^1+4*s^0
Матрица Гурвица
Слайд 78Правило: Для матрицы 3×3 значение определителя равно сумме произведений элементов главной диагонали
Правило: Для матрицы 3×3 значение определителя равно сумме произведений элементов главной диагонали

Слайд 79Критерий Найквиста
Критерий Найквиста позволяет определить устойчивость замкнутой системы, построив частотную характеристику разомкнутой
Критерий Найквиста
Критерий Найквиста позволяет определить устойчивость замкнутой системы, построив частотную характеристику разомкнутой
Слайд 80Годограф Найквиста
Годограф Найквиста - кривая, которая начинается в точке (K; 0) на
Годограф Найквиста
Годограф Найквиста - кривая, которая начинается в точке (K; 0) на

Слайд 81Частота среза ωc - частота, для которой A(ωc) = 1
Для устойчивой системы
Частота среза ωc - частота, для которой A(ωc) = 1
Для устойчивой системы
Слайд 82Система с запаздыванием
Если в системе есть запаздывание на время τ, на любой
Система с запаздыванием
Если в системе есть запаздывание на время τ, на любой
Слайд 83Пример годографа системы
Если L(s) имеет полюса с положительной вещественной частью (разомкнутая система
Пример годографа системы
Если L(s) имеет полюса с положительной вещественной частью (разомкнутая система
Слайд 84Критерий Найквиста для ЛАФЧХ
Сначала предположим, что передаточная функция разомкнутой системы не имеет
Критерий Найквиста для ЛАФЧХ
Сначала предположим, что передаточная функция разомкнутой системы не имеет
Слайд 85Переходный процесс
Хорошо спроектированная система должна не только быть устойчивой и поддерживать заданную
Переходный процесс
Хорошо спроектированная система должна не только быть устойчивой и поддерживать заданную
Слайд 86Устойчивость линейной системы определяется полюсами ее передаточной функции W(s), однако на переходные
Устойчивость линейной системы определяется полюсами ее передаточной функции W(s), однако на переходные

Слайд 87Частотные оценки качества
Качество системы можно оценивать не только во временнóй области (переходный
Частотные оценки качества
Качество системы можно оценивать не только во временнóй области (переходный
Слайд 88Запасы устойчивости по амплитуде
Обычно рассматривают запасы устойчивости по амплитуде и по фазе.
Запасы устойчивости по амплитуде
Обычно рассматривают запасы устойчивости по амплитуде и по фазе.

Слайд 89Запасы устойчивости по фазе
Запас устойчивости по фазе φ.m - это дополнительный сдвиг
Запасы устойчивости по фазе
Запас устойчивости по фазе φ.m - это дополнительный сдвиг
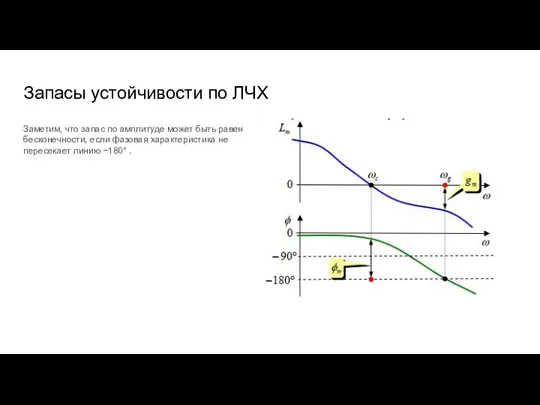
Слайд 90Запасы устойчивости по ЛЧХ
Заметим, что запас по амплитуде может быть равен бесконечности,
Запасы устойчивости по ЛЧХ
Заметим, что запас по амплитуде может быть равен бесконечности,
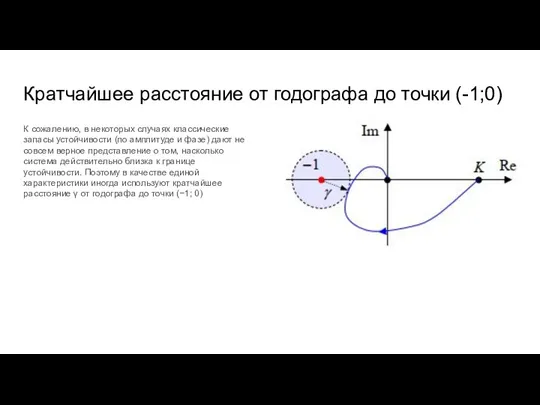
Слайд 91Кратчайшее расстояние от годографа до точки (-1;0)
К сожалению, в некоторых случаях классические
Кратчайшее расстояние от годографа до точки (-1;0)
К сожалению, в некоторых случаях классические
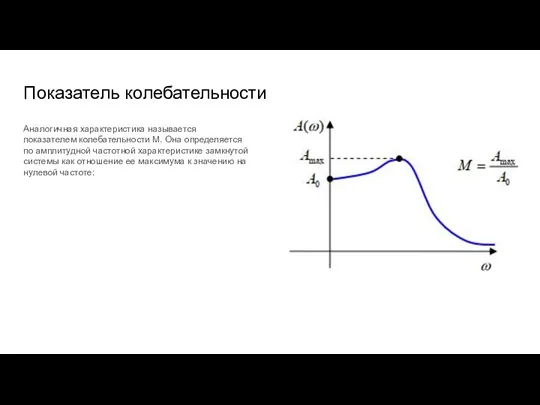
Слайд 92Показатель колебательности
Аналогичная характеристика называется показателем колебательности M. Она определяется по амплитудной частотной
Показатель колебательности
Аналогичная характеристика называется показателем колебательности M. Она определяется по амплитудной частотной
Слайд 93Для каждого значения M можно нарисовать «запретную области», в которую не должна
Для каждого значения M можно нарисовать «запретную области», в которую не должна
Слайд 94Корневые оценки качества
Прежде всего, все корни характеристического полинома ∆(s) для устойчивой системы
Корневые оценки качества
Прежде всего, все корни характеристического полинома ∆(s) для устойчивой системы
Слайд 95Колебательность
Параметр, определяющий скорость затухания колебаний в системе, называется колебательностью.
Колебательность µ для
Колебательность
Параметр, определяющий скорость затухания колебаний в системе, называется колебательностью.
Колебательность µ для
Слайд 96Робастность
Робастность (грубость) - свойство, которое определяет нечувствительность к малым ошибкам моделирования объекта
Робастность
Робастность (грубость) - свойство, которое определяет нечувствительность к малым ошибкам моделирования объекта
Слайд 97Параметрическая неопределенность
Параметрическая неопределенность означает, что структура модели известна, а параметры могут отличаться
Параметрическая неопределенность
Параметрическая неопределенность означает, что структура модели известна, а параметры могут отличаться
Слайд 98Непараметрическая неопределенность
Непараметрическая неопределенность задает допустимую ошибку в частотной области, т.е. ошибку в
Непараметрическая неопределенность
Непараметрическая неопределенность задает допустимую ошибку в частотной области, т.е. ошибку в
 Определение безэквивалентной лексики
Определение безэквивалентной лексики Позициониране на Схемата за екомаркировка в държавната политика за устойчив туризъм ДЪРЖАВНА АГЕНЦИЯ ПО ТУРИЗЪМ Десислава Михалкова – Станимирова Гл. експерт в дирекция “Туристическа политика” 20 октомври, 2008 г, гр. София
Позициониране на Схемата за екомаркировка в държавната политика за устойчив туризъм ДЪРЖАВНА АГЕНЦИЯ ПО ТУРИЗЪМ Десислава Михалкова – Станимирова Гл. експерт в дирекция “Туристическа политика” 20 октомври, 2008 г, гр. София Презентация на тему Просто сказочные вопросы
Презентация на тему Просто сказочные вопросы  Я Гражданин России
Я Гражданин России Же-Ким
Же-Ким Корпоративный мессенджер для брейнштормов
Корпоративный мессенджер для брейнштормов Олимпийские игры: символика ,история, география
Олимпийские игры: символика ,история, география Чичиков – беда или надежда России? Образ Чичикова в поэме Николая Васильевича Гоголя «Мёртвые души»
Чичиков – беда или надежда России? Образ Чичикова в поэме Николая Васильевича Гоголя «Мёртвые души» Событийные мероприятия
Событийные мероприятия Трение в нашей жизни
Трение в нашей жизни О повышении эффективности и безопасного использования отраслевого парка исследовательских ядерных установок
О повышении эффективности и безопасного использования отраслевого парка исследовательских ядерных установок Всероссийский инженерный конкурс. Лесопосадочные машины
Всероссийский инженерный конкурс. Лесопосадочные машины Презентация на тему Значение птиц в природе и жизни человека
Презентация на тему Значение птиц в природе и жизни человека Презентация на тему Экстремумы функции
Презентация на тему Экстремумы функции Джинсы
Джинсы Презентация к методической разработке для спецкурса: «Обратные тригонометрические функции» (10-11 кл.).
Презентация к методической разработке для спецкурса: «Обратные тригонометрические функции» (10-11 кл.). Хороших знаний и отличного настроения!
Хороших знаний и отличного настроения! Поддержка стандарта OpenGIS в СУБД ЛИНТЕР
Поддержка стандарта OpenGIS в СУБД ЛИНТЕР Презентация на тему Транспорт
Презентация на тему Транспорт Три вида бизнеса, востребованные в г. Кострома
Три вида бизнеса, востребованные в г. Кострома Обработка юбки после первой примерки
Обработка юбки после первой примерки Конкурс среди социально ориентированных некоммерческих организаций на право получения субсидий из бюджета города Екатеринбурга
Конкурс среди социально ориентированных некоммерческих организаций на право получения субсидий из бюджета города Екатеринбурга Fun Activities (Развлечения)
Fun Activities (Развлечения) Мониторинг направлений актуального профессионального развития научно-педагогических, руководящих кадров, сотрудников ПетрГУ
Мониторинг направлений актуального профессионального развития научно-педагогических, руководящих кадров, сотрудников ПетрГУ КУБА – УКРАЙНА 1990 – 2011
КУБА – УКРАЙНА 1990 – 2011 Презентация на тему Дифракция света
Презентация на тему Дифракция света Родители трудолюбивы и дети не ленивы
Родители трудолюбивы и дети не ленивы Ліпікар. Очищувальний гель
Ліпікар. Очищувальний гель