- Принципы управления

Содержание
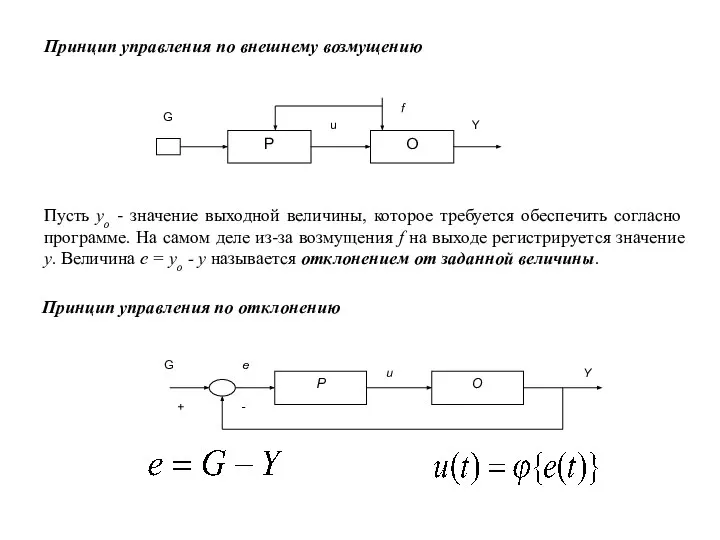
- 2. Принцип управления по внешнему возмущению Пусть yо - значение выходной величины, которое требуется обеспечить согласно программе.
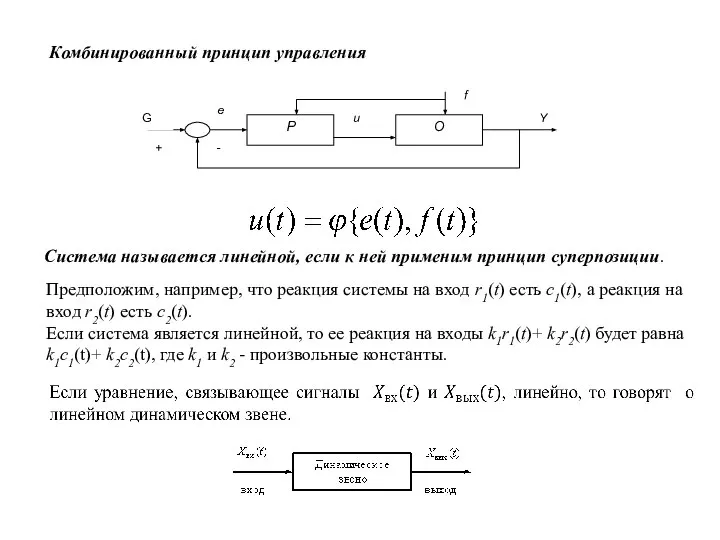
- 3. Комбинированный принцип управления Система называется линейной, если к ней применим принцип суперпозиции. Предположим, например, что реакция
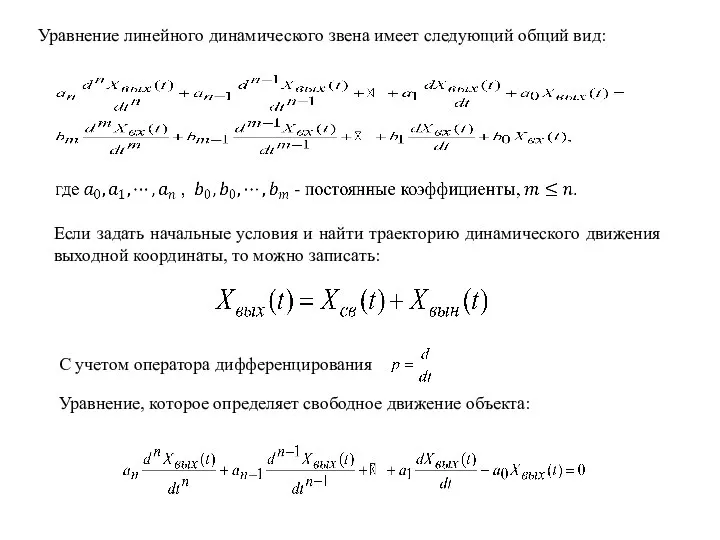
- 4. Уравнение линейного динамического звена имеет следующий общий вид: Если задать начальные условия и найти траекторию динамического
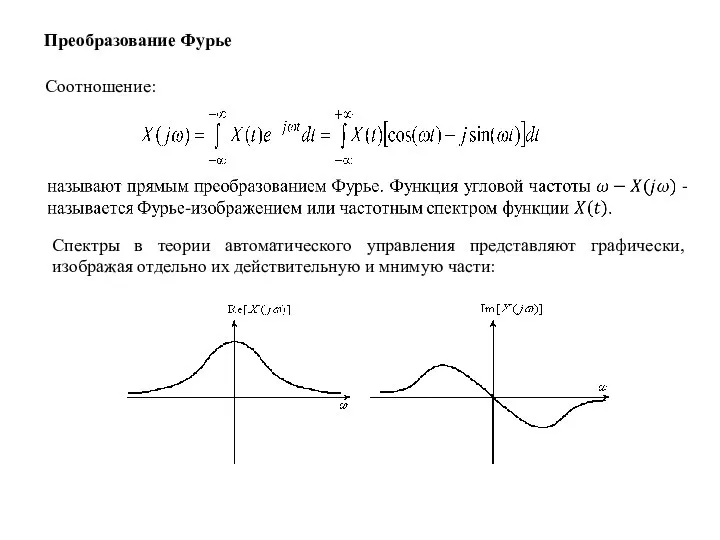
- 5. Преобразование Фурье Соотношение: Спектры в теории автоматического управления представляют графически, изображая отдельно их действительную и мнимую
- 6. Частотный спектр единичной ступенчатой функции (функция Хевисайда). Для этой функции не выполняется требование абсолютной интегрируемости, так
- 7. Преобразование Лапласа Соотношение Комплексная переменная
- 8. Изображение по Лапласу для импульсной функции Изображение по Лапласу для единичнойфункции Аналогично можно ввести оператор интегрирования
- 9. Теорема о дифференцировании оригинала
- 10. Теорема об интегрировании оригинала Теорема запаздывания. Для любого справедливо соотношение Теорема о свертке (умножении изображений) Теорема
- 12. Скачать презентацию
Слайд 2Принцип управления по внешнему возмущению
Пусть yо - значение выходной величины, которое требуется
Принцип управления по внешнему возмущению
Пусть yо - значение выходной величины, которое требуется
Слайд 3Комбинированный принцип управления
Система называется линейной, если к ней применим принцип суперпозиции.
Предположим,
Комбинированный принцип управления
Система называется линейной, если к ней применим принцип суперпозиции.
Предположим,
Слайд 4Уравнение линейного динамического звена имеет следующий общий вид:
Если задать начальные условия и
Уравнение линейного динамического звена имеет следующий общий вид:
Если задать начальные условия и
Слайд 5Преобразование Фурье
Соотношение:
Спектры в теории автоматического управления представляют графически, изображая отдельно их действительную
Преобразование Фурье
Соотношение:
Спектры в теории автоматического управления представляют графически, изображая отдельно их действительную
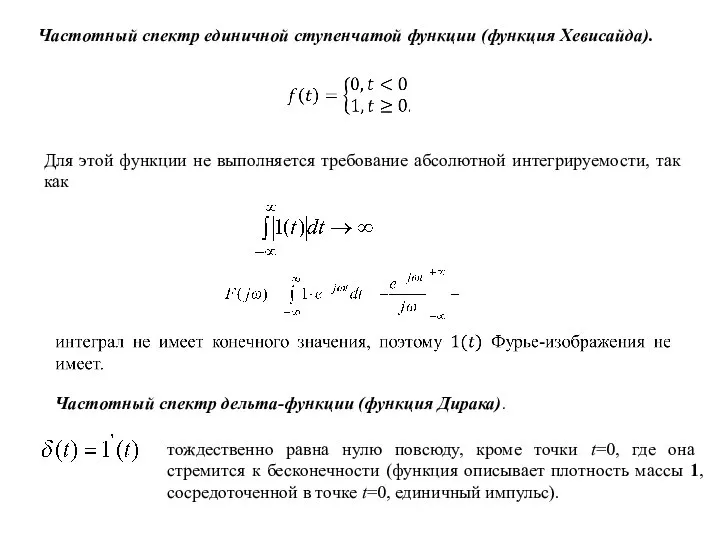
Слайд 6Частотный спектр единичной ступенчатой функции (функция Хевисайда).
Для этой функции не выполняется требование
Частотный спектр единичной ступенчатой функции (функция Хевисайда).
Для этой функции не выполняется требование
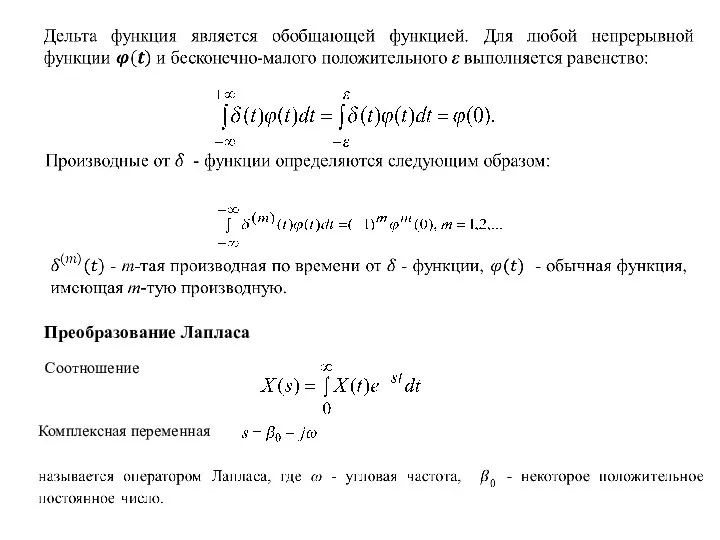
Слайд 7
Преобразование Лапласа
Соотношение
Комплексная переменная
Преобразование Лапласа
Соотношение
Комплексная переменная
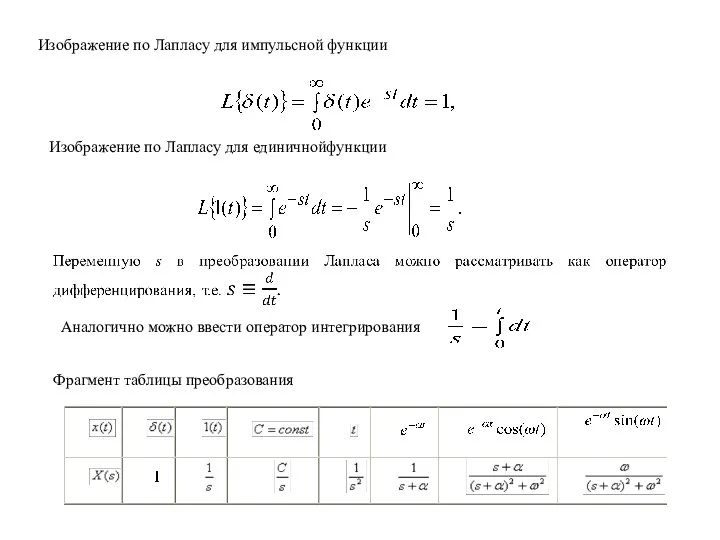
Слайд 8Изображение по Лапласу для импульсной функции
Изображение по Лапласу для единичнойфункции
Аналогично можно ввести
Изображение по Лапласу для импульсной функции
Изображение по Лапласу для единичнойфункции
Аналогично можно ввести
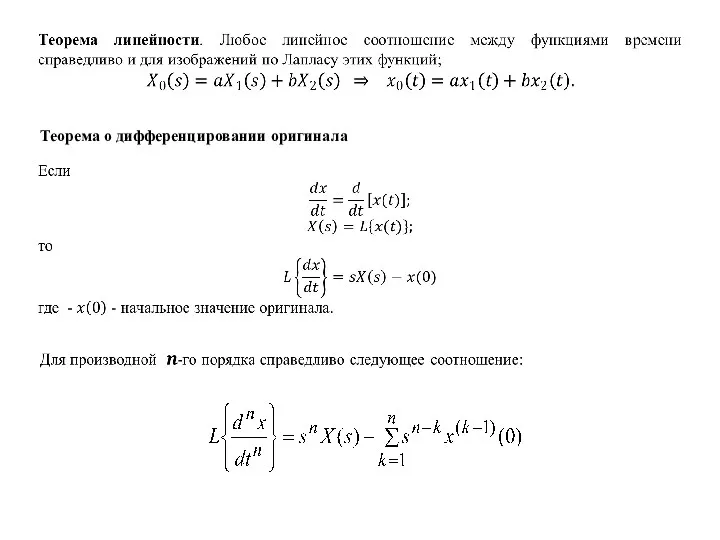
Слайд 9
Теорема о дифференцировании оригинала
Теорема о дифференцировании оригинала
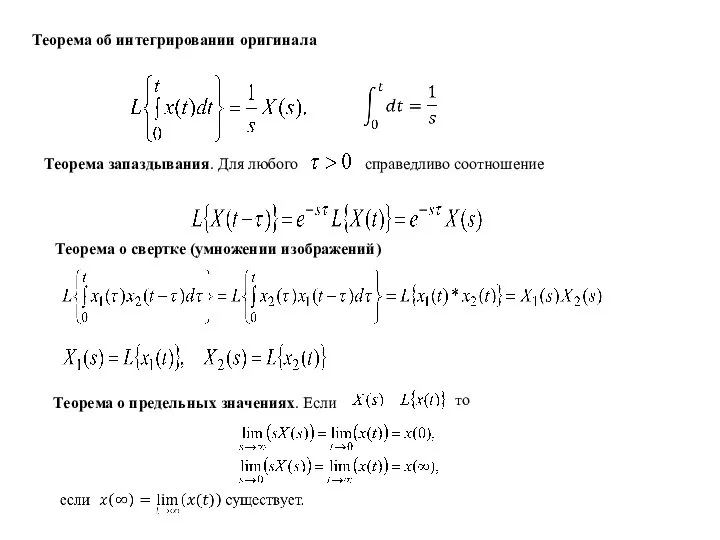
Слайд 10Теорема об интегрировании оригинала
Теорема запаздывания. Для любого
справедливо соотношение
Теорема о свертке (умножении
Теорема об интегрировании оригинала
Теорема запаздывания. Для любого
справедливо соотношение
Теорема о свертке (умножении
 Презентация на тему Соседи восточных славян (6 класс)
Презентация на тему Соседи восточных славян (6 класс) Социальная политика занятости населения
Социальная политика занятости населения Лес – природное сообщество
Лес – природное сообщество Модель бизнеса
Модель бизнеса Сверление и зенкование
Сверление и зенкование ВКР: Разработка низкооборотистого асинхронного генератора электрического тока
ВКР: Разработка низкооборотистого асинхронного генератора электрического тока Конфликтные ситуации в семье
Конфликтные ситуации в семье Презентация на тему Житков "Как я ловил человечков" 4 класс
Презентация на тему Житков "Как я ловил человечков" 4 класс  Et Dieu crea la beaut
Et Dieu crea la beaut Суп. Ингредиенты
Суп. Ингредиенты ПЛАНИРУЙ ГЛАВНОЕ В СВОЕЙ ЖИЗНИ !!! (или о контрацепции для молодежи, позволяющей любить)
ПЛАНИРУЙ ГЛАВНОЕ В СВОЕЙ ЖИЗНИ !!! (или о контрацепции для молодежи, позволяющей любить) Презентация на тему Морские рыбы
Презентация на тему Морские рыбы 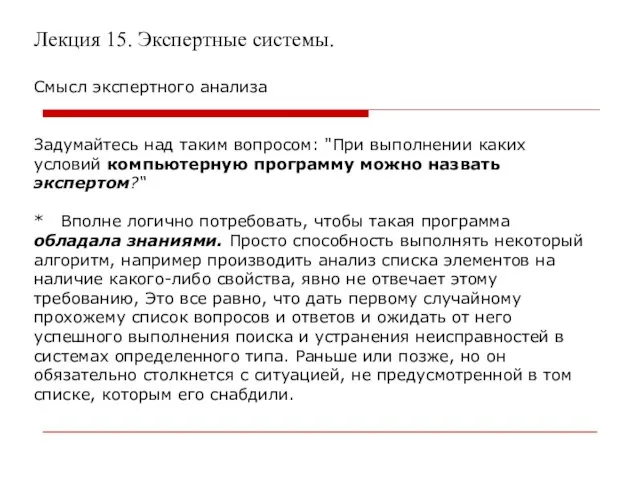 Экспертные системы
Экспертные системы Введение. Предмет и задачи курса. Сущность понятий менеджмент
Введение. Предмет и задачи курса. Сущность понятий менеджмент Образовательная программа ДОУ
Образовательная программа ДОУ 02_-_Suschnost_i_proiskhozhdenie_prava
02_-_Suschnost_i_proiskhozhdenie_prava Презентация на тему Морфологические признаки глагола
Презентация на тему Морфологические признаки глагола Биологические ритмы
Биологические ритмы Автоматическое формирование рубрикатора полнотекстовых документов
Автоматическое формирование рубрикатора полнотекстовых документов Гелий. Получение
Гелий. Получение Психологическая диагностика и коррекция аддиктивного поведения у подростков (из опыта работы психолога наркологического отделен
Психологическая диагностика и коррекция аддиктивного поведения у подростков (из опыта работы психолога наркологического отделен Химия в косметике
Химия в косметике Dr.Web Enterprise Suite
Dr.Web Enterprise Suite Управление рисками как система менеджмента
Управление рисками как система менеджмента Методические подходы к преподаванию курса обществознания по учебнику «Обществознание. Глобальный мир в XXI веке»
Методические подходы к преподаванию курса обществознания по учебнику «Обществознание. Глобальный мир в XXI веке» Презентация футболок для болельщиков футбольных сборных, участвующих на чемпионате мира 2018
Презентация футболок для болельщиков футбольных сборных, участвующих на чемпионате мира 2018 Абразивный инструмент
Абразивный инструмент Химическая промышленность
Химическая промышленность