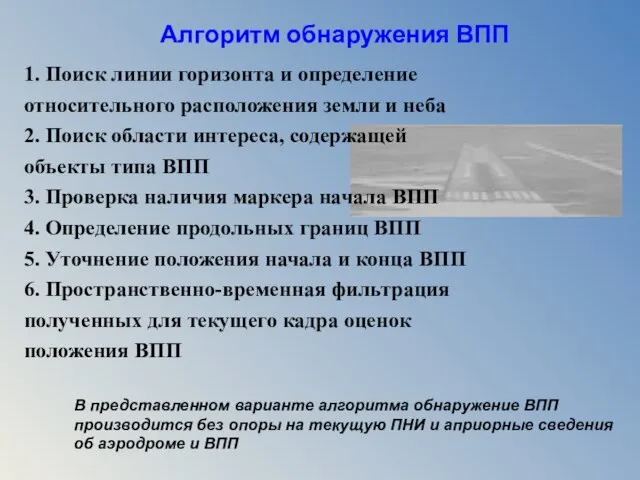
- Разработка алгоритма автоматического обнаружения взлетно-посадочной полосы на видеоизображениях

Содержание
- 2. 1. Поиск линии горизонта и определение относительного расположения земли и неба 2. Поиск области интереса, содержащей
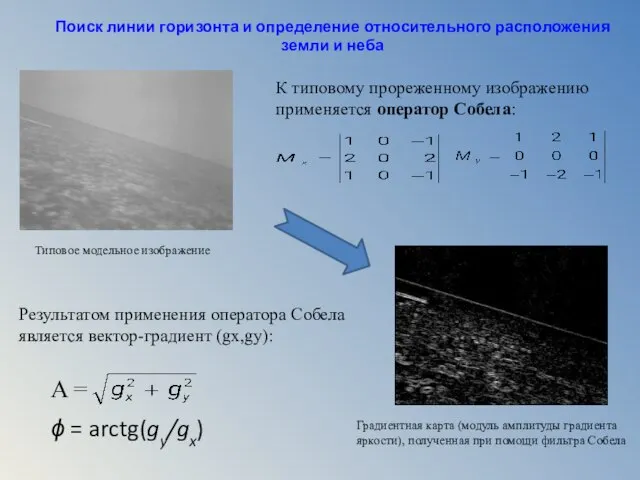
- 3. Поиск линии горизонта и определение относительного расположения земли и неба Типовое модельное изображение Градиентная карта (модуль
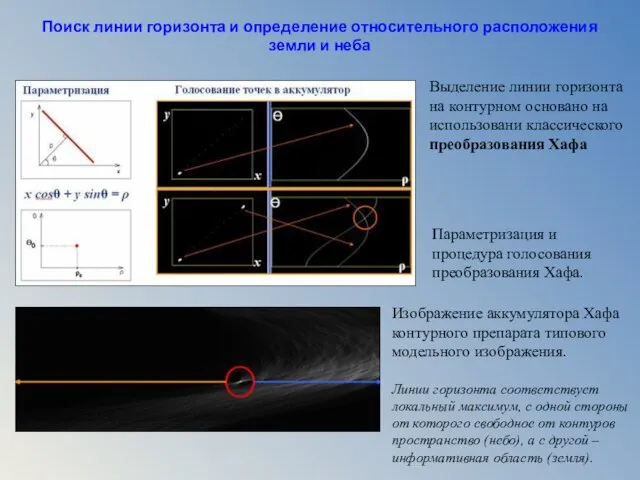
- 4. Изображение аккумулятора Хафа контурного препарата типового модельного изображения. Линии горизонта соответствует локальный максимум, с одной стороны
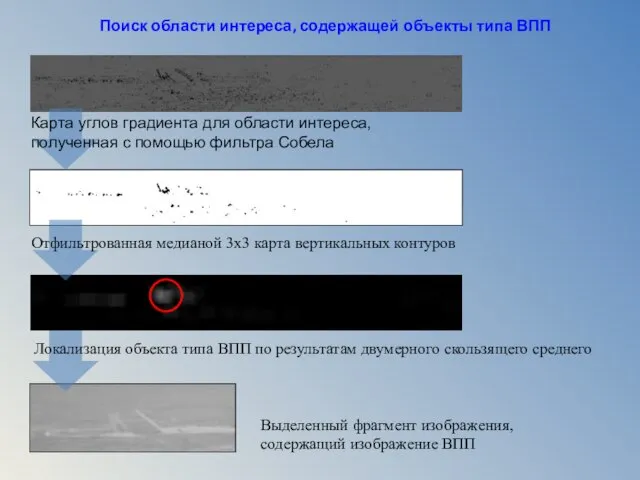
- 5. Поиск области интереса, содержащей объекты типа ВПП Выделенный фрагмент изображения, содержащий изображение ВПП Карта углов градиента
- 6. Проверка наличия маркера начала ВПП Маркер начала ВПП, присутствующий на тестовых видеопоследовательностях Карта горизонтальных градиентов фрагмента,
- 7. Определение продольных границ ВПП Параметризация ортонормального преобразования Хафа (x1, x2) Результат ортонормального преобразования Хафа изображения ВПП
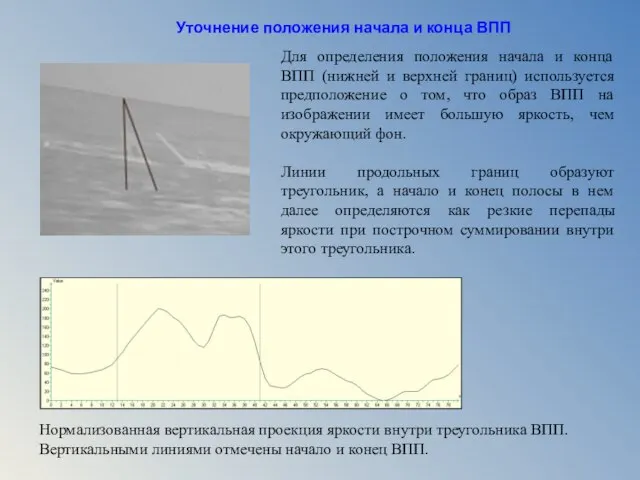
- 8. Уточнение положения начала и конца ВПП Нормализованная вертикальная проекция яркости внутри треугольника ВПП. Вертикальными линиями отмечены
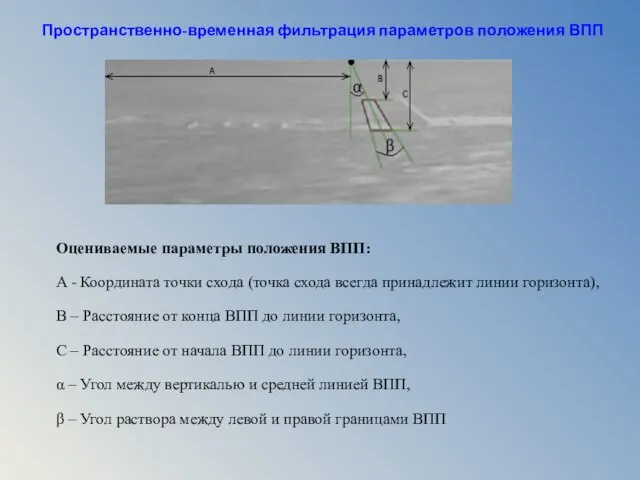
- 9. Пространственно-временная фильтрация параметров положения ВПП Оцениваемые параметры положения ВПП: A - Координата точки схода (точка схода
- 10. Прототип EVS реализован на базе БУП ИМА и включен в состав демонстрационного стенда ФГУП «ГосНИИАС» Быстродействующая
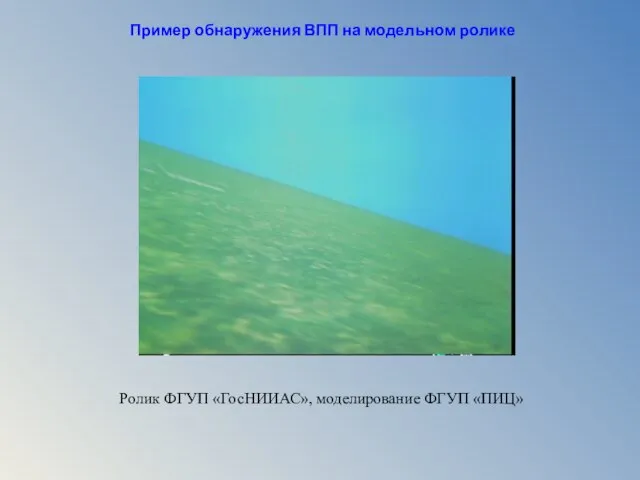
- 11. Ролик ФГУП «ГосНИИАС», моделирование ФГУП «ПИЦ» Пример обнаружения ВПП на модельном ролике
- 12. Как показывают проведенные тесты, описанный алгоритм обеспечивает устойчивое обнаружение, прослеживание и индикацию визуального положения ВВП на
- 14. Скачать презентацию
Слайд 3Поиск линии горизонта и определение относительного расположения земли и неба
Типовое модельное изображение
Градиентная
Поиск линии горизонта и определение относительного расположения земли и неба
Типовое модельное изображение
Градиентная
Слайд 4Изображение аккумулятора Хафа
контурного препарата типового
модельного изображения.
Линии горизонта соответствует локальный максимум,
Изображение аккумулятора Хафа
контурного препарата типового
модельного изображения.
Линии горизонта соответствует локальный максимум,
Слайд 5Поиск области интереса, содержащей объекты типа ВПП
Выделенный фрагмент изображения, содержащий изображение ВПП
Карта
Поиск области интереса, содержащей объекты типа ВПП
Выделенный фрагмент изображения, содержащий изображение ВПП
Карта
Слайд 6Проверка наличия маркера начала ВПП
Маркер начала ВПП, присутствующий на тестовых видеопоследовательностях
Карта горизонтальных
Проверка наличия маркера начала ВПП
Маркер начала ВПП, присутствующий на тестовых видеопоследовательностях
Карта горизонтальных

Слайд 7Определение продольных границ ВПП
Параметризация ортонормального преобразования Хафа (x1, x2)
Результат ортонормального
Определение продольных границ ВПП
Параметризация ортонормального преобразования Хафа (x1, x2)
Результат ортонормального

Слайд 8Уточнение положения начала и конца ВПП
Нормализованная вертикальная проекция яркости внутри треугольника ВПП.
Уточнение положения начала и конца ВПП
Нормализованная вертикальная проекция яркости внутри треугольника ВПП.
Слайд 9Пространственно-временная фильтрация параметров положения ВПП
Оцениваемые параметры положения ВПП:
A - Координата точки схода
Пространственно-временная фильтрация параметров положения ВПП
Оцениваемые параметры положения ВПП:
A - Координата точки схода
Слайд 10
Прототип EVS реализован на базе БУП ИМА и включен в
Прототип EVS реализован на базе БУП ИМА и включен в

Слайд 11
Ролик ФГУП «ГосНИИАС», моделирование ФГУП «ПИЦ»
Пример обнаружения ВПП на модельном ролике
Ролик ФГУП «ГосНИИАС», моделирование ФГУП «ПИЦ»
Пример обнаружения ВПП на модельном ролике
Слайд 12Как показывают проведенные тесты, описанный алгоритм обеспечивает устойчивое обнаружение, прослеживание и индикацию
 Чатная жизнь
Чатная жизнь Презентация на тему У истоков цивилизации
Презентация на тему У истоков цивилизации  Презентация на тему Урок внеклассного чтения по рассказу Германа Гёссе «Европеец»
Презентация на тему Урок внеклассного чтения по рассказу Германа Гёссе «Европеец»  Развивающие задания №2
Развивающие задания №2 История российского флага
История российского флага Кругозорро - программа для учащихся 8-11 классов
Кругозорро - программа для учащихся 8-11 классов Новогодние персонажи со всего света. Зюзя
Новогодние персонажи со всего света. Зюзя Администрирование информационных систем
Администрирование информационных систем Продукция предприятия
Продукция предприятия Презентация на тему Оборона Сталинграда
Презентация на тему Оборона Сталинграда  Итоги реформирования СПбГУ Публикационная активность. Часть II: факультеты
Итоги реформирования СПбГУ Публикационная активность. Часть II: факультеты 1.0
1.0 Арисова
Арисова Опыт развития системы технической подготовки документации ОАО «ЭЗТМ» с использованием СПРУТ-ТП
Опыт развития системы технической подготовки документации ОАО «ЭЗТМ» с использованием СПРУТ-ТП Олимпийские игры. История античная и современная
Олимпийские игры. История античная и современная Заповеди блаженств
Заповеди блаженств Георгий Пинхасов-мастер работы со светом и один из лучший мировых стрит-фотографов
Георгий Пинхасов-мастер работы со светом и один из лучший мировых стрит-фотографов Реология и гидравлика буровых растворов
Реология и гидравлика буровых растворов Разработка программного обеспечения для поддержки промышленного производства
Разработка программного обеспечения для поддержки промышленного производства Азот
Азот Природные зоны Африки
Природные зоны Африки Ходынинская городская библиотека
Ходынинская городская библиотека Символика России: герб, флаг и гимн
Символика России: герб, флаг и гимн Конкурсные механики
Конкурсные механики Проведенные в 2011 году мероприятия по модернизации объектов САФУ
Проведенные в 2011 году мероприятия по модернизации объектов САФУ 6 Памятка участнику СВО (двусторонняя А3 раскладушка)
6 Памятка участнику СВО (двусторонняя А3 раскладушка) Путь к Бриллиантовой Орхидее более прост , чем Вы думаете !
Путь к Бриллиантовой Орхидее более прост , чем Вы думаете ! Бог огня Гефест
Бог огня Гефест