Скоростной следящий электропривод. Синтез регулятора тока для настройки контура тока на оптимум по модулю
- Скоростной следящий электропривод. Синтез регулятора тока для настройки контура тока на оптимум по модулю

Содержание
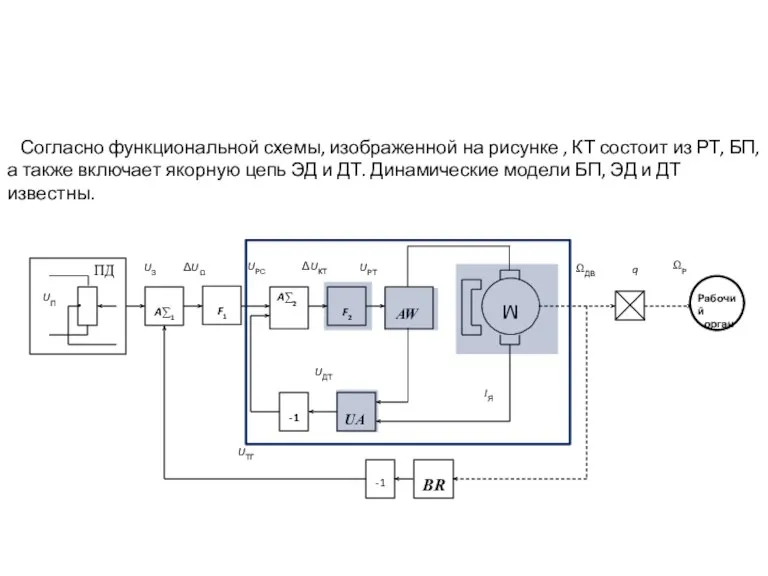
- 2. Согласно функциональной схемы, изображенной на рисунке , КТ состоит из РТ, БП, а также включает якорную
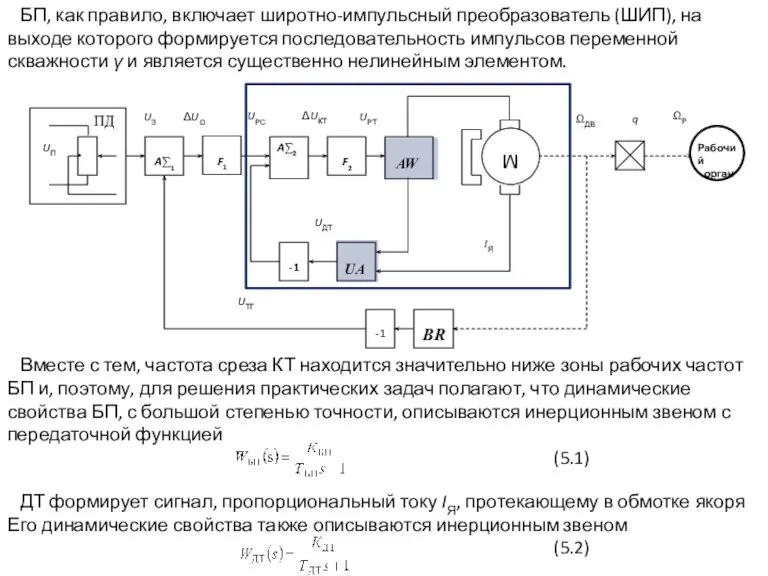
- 3. Вместе с тем, частота среза КТ находится значительно ниже зоны рабочих частот БП и, поэтому, для
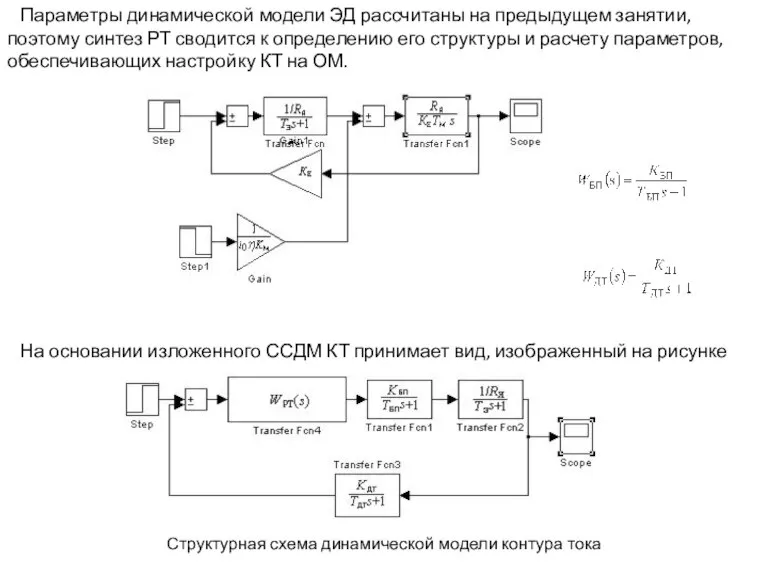
- 4. Параметры динамической модели ЭД рассчитаны на предыдущем занятии, поэтому синтез РТ сводится к определению его структуры
- 5. где - суммарная малая постоянная времени КТ. Расчет параметров регулятора тока и построение динамической модели контура
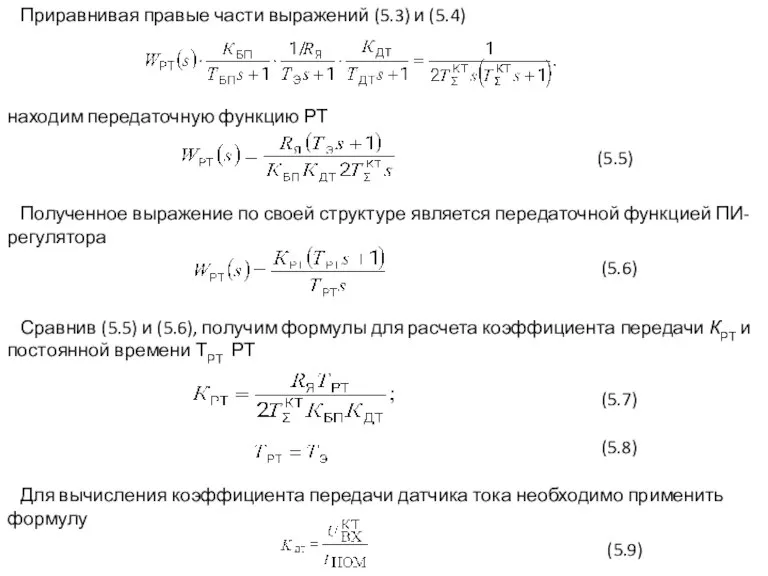
- 6. (5.5) Полученное выражение по своей структуре является передаточной функцией ПИ-регулятора (5.6) Сравнив (5.5) и (5.6), получим
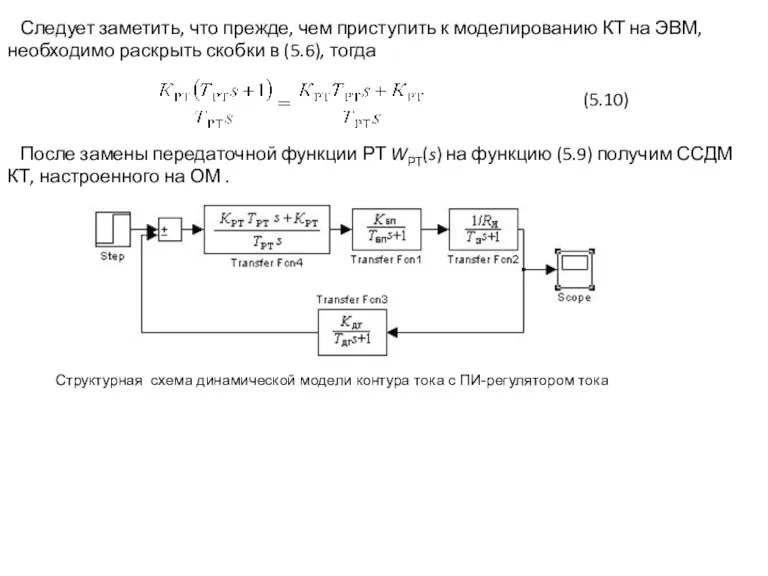
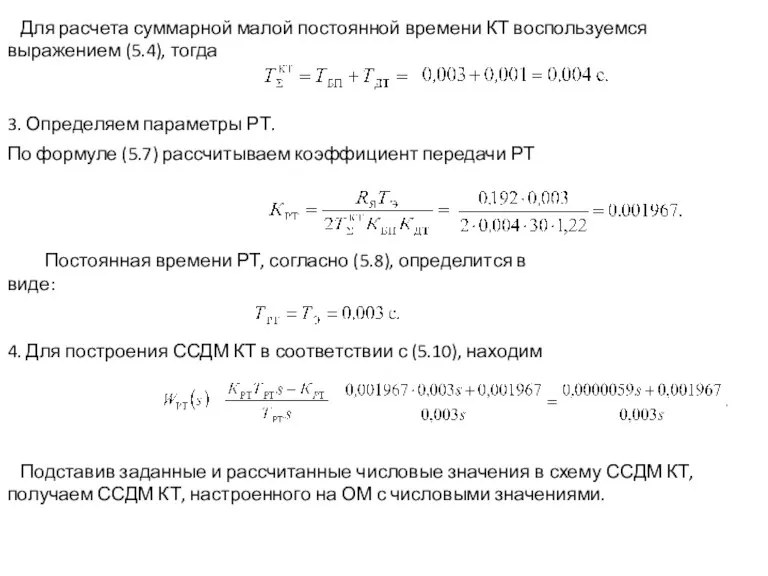
- 7. Следует заметить, что прежде, чем приступить к моделированию КТ на ЭВМ, необходимо раскрыть скобки в (5.6),
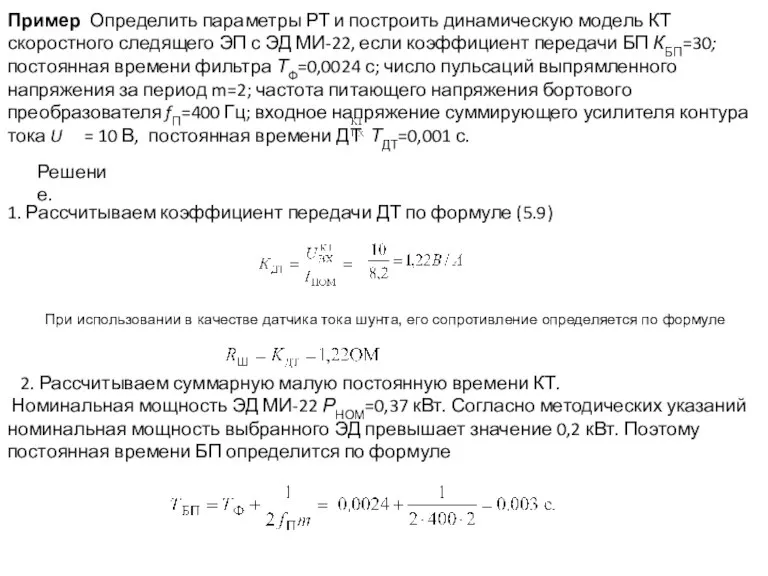
- 8. Пример Определить параметры РТ и построить динамическую модель КТ скоростного следящего ЭП с ЭД МИ-22, если
- 9. Для расчета суммарной малой постоянной времени КТ воспользуемся выражением (5.4), тогда 3. Определяем параметры РТ. По
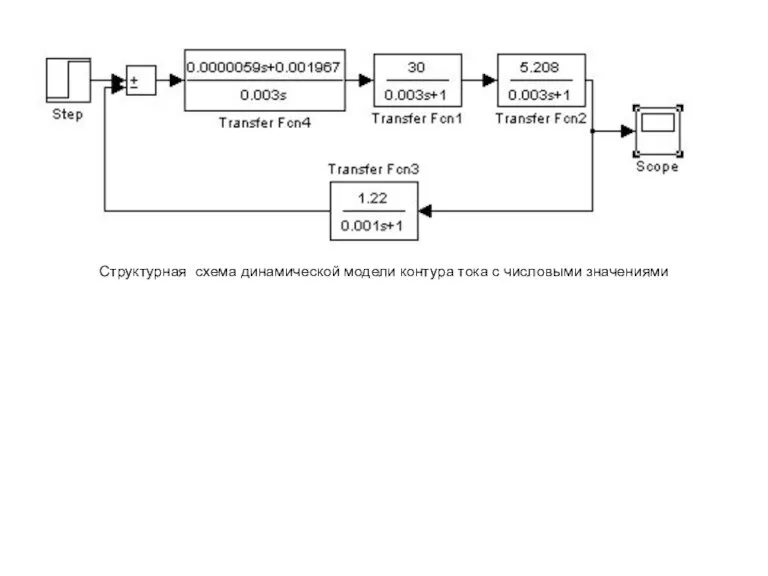
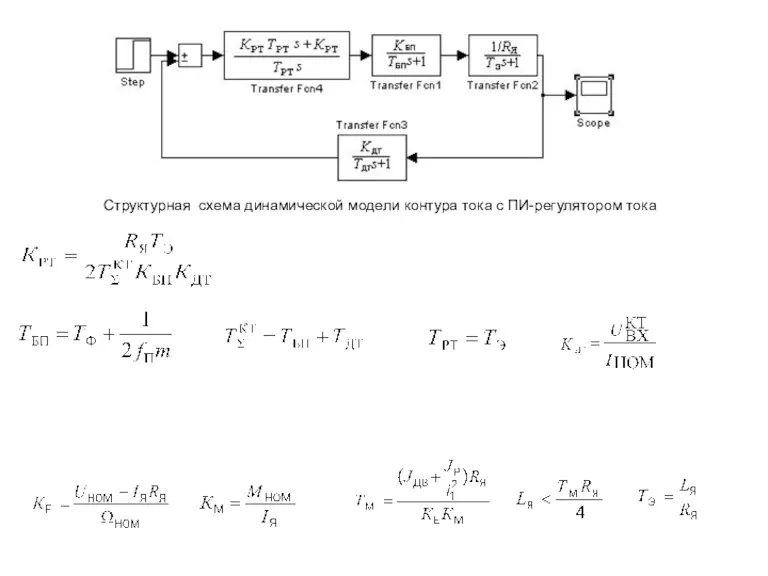
- 10. Структурная схема динамической модели контура тока с числовыми значениями
- 11. Структурная схема динамической модели контура тока с ПИ-регулятором тока
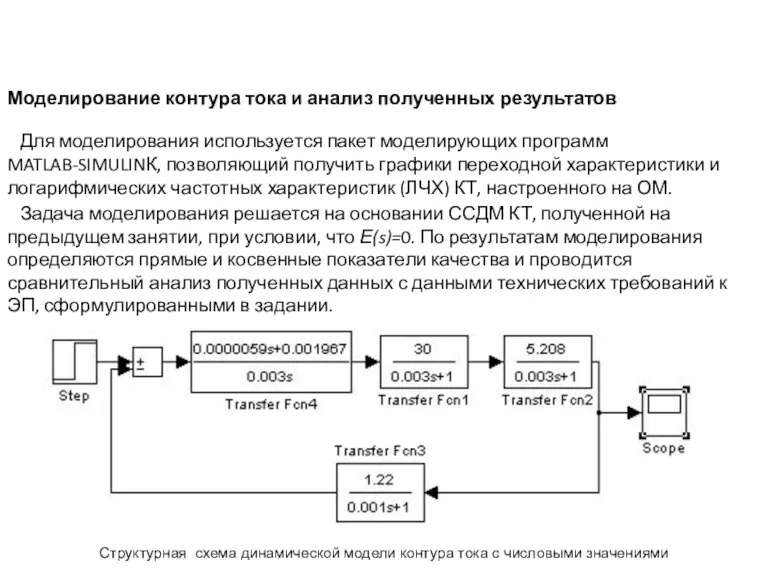
- 12. Моделирование контура тока и анализ полученных результатов Для моделирования используется пакет моделирующих программ MATLAB-SIMULINК, позволяющий получить
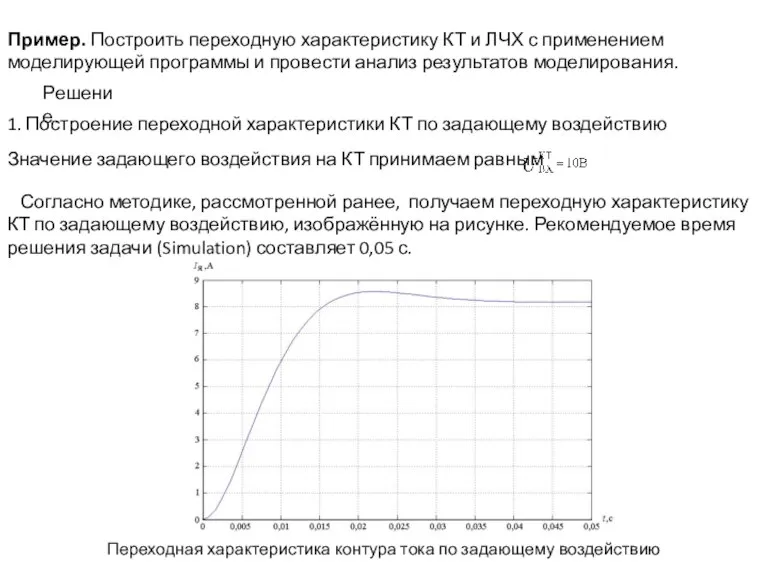
- 13. Пример. Построить переходную характеристику КТ и ЛЧХ с применением моделирующей программы и провести анализ результатов моделирования.
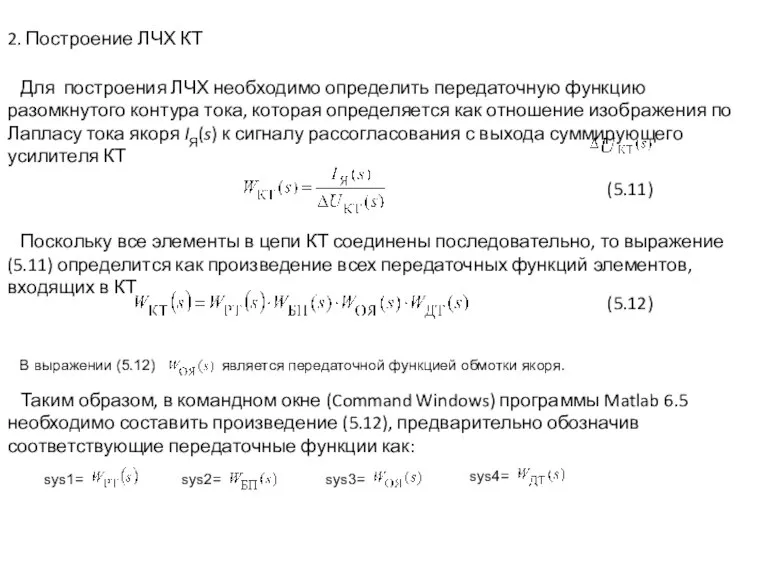
- 14. 2. Построение ЛЧХ КТ Для построения ЛЧХ необходимо определить передаточную функцию разомкнутого контура тока, которая определяется
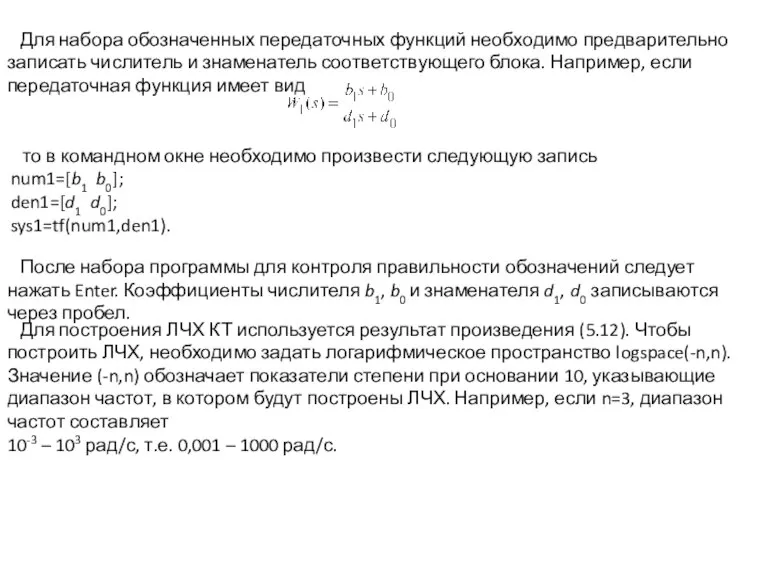
- 15. Для набора обозначенных передаточных функций необходимо предварительно записать числитель и знаменатель соответствующего блока. Например, если передаточная
- 16. Соответственно программа для получения ЛЧХ КТ принимает вид: >> num1=[0.0000059 0.001967]; >> den1=[0.003 0]; >> sys1=tf(num1,den1)
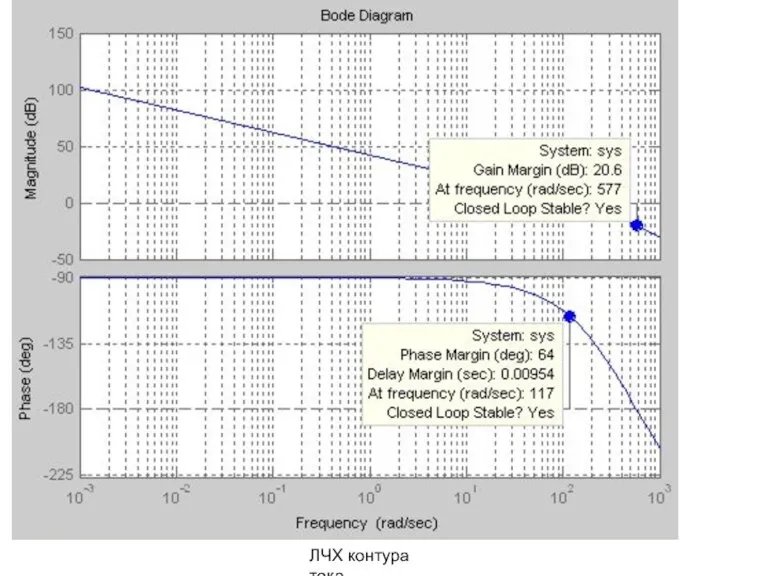
- 17. ЛЧХ контура тока
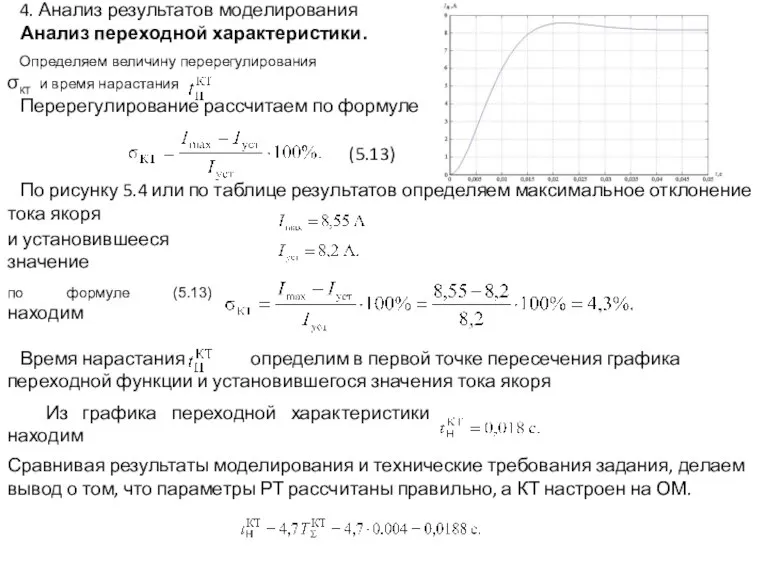
- 18. Перерегулирование рассчитаем по формуле Определяем величину перерегулирования σКТ и время нарастания Время нарастания определим в первой
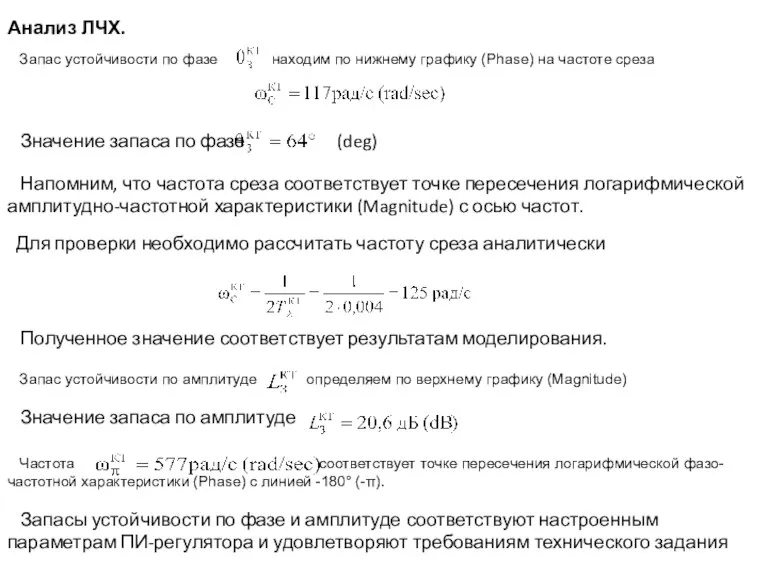
- 19. Частота соответствует точке пересечения логарифмической фазо-частотной характеристики (Phase) с линией -180° (-π). Анализ ЛЧХ. Запас устойчивости
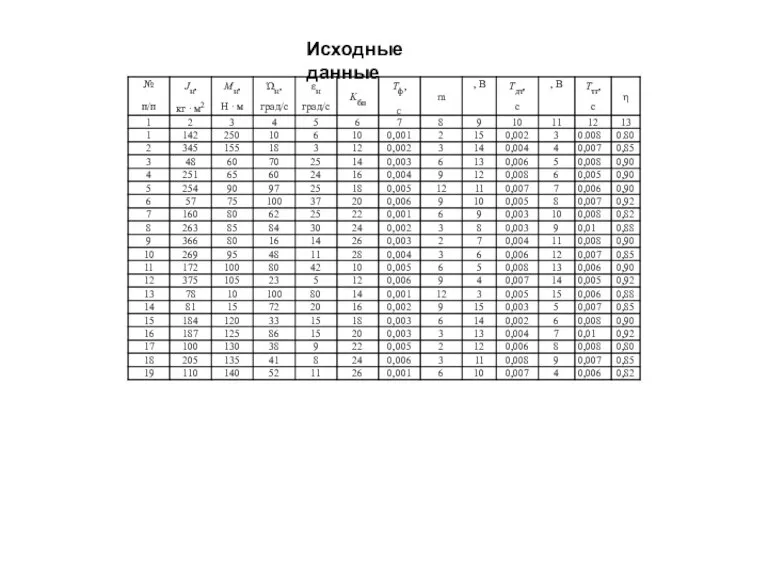
- 20. Исходные данные
- 22. Скачать презентацию
Слайд 3 Вместе с тем, частота среза КТ находится значительно ниже зоны рабочих
Вместе с тем, частота среза КТ находится значительно ниже зоны рабочих
Слайд 4 Параметры динамической модели ЭД рассчитаны на предыдущем занятии, поэтому синтез РТ
Параметры динамической модели ЭД рассчитаны на предыдущем занятии, поэтому синтез РТ
Слайд 5 где - суммарная малая постоянная времени КТ.
Расчет параметров регулятора тока
где - суммарная малая постоянная времени КТ.
Расчет параметров регулятора тока

Слайд 6(5.5)
Полученное выражение по своей структуре является передаточной функцией ПИ-регулятора
(5.6)
Сравнив (5.5)
(5.5)
Полученное выражение по своей структуре является передаточной функцией ПИ-регулятора
(5.6)
Сравнив (5.5)
Слайд 7 Следует заметить, что прежде, чем приступить к моделированию КТ на ЭВМ,
Следует заметить, что прежде, чем приступить к моделированию КТ на ЭВМ,
Слайд 8Пример Определить параметры РТ и построить динамическую модель КТ скоростного следящего ЭП
Пример Определить параметры РТ и построить динамическую модель КТ скоростного следящего ЭП
Слайд 9 Для расчета суммарной малой постоянной времени КТ воспользуемся выражением (5.4), тогда
3.
Для расчета суммарной малой постоянной времени КТ воспользуемся выражением (5.4), тогда
3.
Слайд 10Структурная схема динамической модели контура тока с числовыми значениями
Структурная схема динамической модели контура тока с числовыми значениями
Слайд 11Структурная схема динамической модели контура тока с ПИ-регулятором тока
Структурная схема динамической модели контура тока с ПИ-регулятором тока
Слайд 12Моделирование контура тока и анализ полученных результатов
Для моделирования используется пакет моделирующих
Моделирование контура тока и анализ полученных результатов
Для моделирования используется пакет моделирующих
Слайд 13Пример. Построить переходную характеристику КТ и ЛЧХ с применением моделирующей программы и
Пример. Построить переходную характеристику КТ и ЛЧХ с применением моделирующей программы и
Слайд 142. Построение ЛЧХ КТ
Для построения ЛЧХ необходимо определить передаточную функцию разомкнутого
2. Построение ЛЧХ КТ
Для построения ЛЧХ необходимо определить передаточную функцию разомкнутого
Слайд 15 Для набора обозначенных передаточных функций необходимо предварительно записать числитель и знаменатель
Для набора обозначенных передаточных функций необходимо предварительно записать числитель и знаменатель
Слайд 16Соответственно программа для получения ЛЧХ КТ принимает вид:
>> num1=[0.0000059 0.001967];
>> den1=[0.003 0];
>>
Соответственно программа для получения ЛЧХ КТ принимает вид:
>> num1=[0.0000059 0.001967];
>> den1=[0.003 0];
>>
![Соответственно программа для получения ЛЧХ КТ принимает вид: >> num1=[0.0000059 0.001967]; >>](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1142553/slide-15.jpg)
Слайд 17ЛЧХ контура тока
ЛЧХ контура тока
Слайд 18 Перерегулирование рассчитаем по формуле
Определяем величину перерегулирования σКТ и время нарастания
Перерегулирование рассчитаем по формуле
Определяем величину перерегулирования σКТ и время нарастания
Слайд 19 Частота соответствует точке пересечения логарифмической фазо-частотной характеристики (Phase) с линией -180°
Частота соответствует точке пересечения логарифмической фазо-частотной характеристики (Phase) с линией -180°
Слайд 20Исходные данные
Исходные данные
 Этюд. Построение мебели. 8 тема
Этюд. Построение мебели. 8 тема Комплексная программаинформационно-аналитическогосопровождения тестирования студентовi-exam.ru
Комплексная программаинформационно-аналитическогосопровождения тестирования студентовi-exam.ru ВКР: Совершенствование активных методов обслуживания покупателей в магазине
ВКР: Совершенствование активных методов обслуживания покупателей в магазине Развитие методов синтеза, исследование физико-химических и электрофизических свойств модифицированных наноуглеродных и фторугл
Развитие методов синтеза, исследование физико-химических и электрофизических свойств модифицированных наноуглеродных и фторугл Операционная деятельность в логистике. ПОЧУ Улан-Удэнский торгово-экономический техникум. Егорова Юлия
Операционная деятельность в логистике. ПОЧУ Улан-Удэнский торгово-экономический техникум. Егорова Юлия Социально-образовательный проект «Телецентр. Школьные новости»
Социально-образовательный проект «Телецентр. Школьные новости» Как писать жи - ши, ча - ща, чу - щу, чк - чн - нч - нщ?
Как писать жи - ши, ча - ща, чу - щу, чк - чн - нч - нщ? Логика
Логика Презентация на тему Стенокардия
Презентация на тему Стенокардия  Автоматическая энергосберегающая система освещения Automatic Energy Saving Lighting System
Автоматическая энергосберегающая система освещения Automatic Energy Saving Lighting System Как использовать в измерении социальных медиа практику смежных отраслей?
Как использовать в измерении социальных медиа практику смежных отраслей? Constitution Act, 1982
Constitution Act, 1982 Тема 5. Манипулятивные игры как форма социальной активности индивида
Тема 5. Манипулятивные игры как форма социальной активности индивида Воспитание 2005
Воспитание 2005 Группа поддержки спортивных команд GERBERA
Группа поддержки спортивных команд GERBERA Работа с корпорациями
Работа с корпорациями Как выполнить чертёж Брусок /стойка/. 10, 11 класс
Как выполнить чертёж Брусок /стойка/. 10, 11 класс Нематериальные активы – скрытые резервы бизнеса: ценности как источник стоимости
Нематериальные активы – скрытые резервы бизнеса: ценности как источник стоимости Виды ответственности за невыполнение нормативных правовых актов по охране труда
Виды ответственности за невыполнение нормативных правовых актов по охране труда Запись простого линейного алгоритма для формального исполнителя
Запись простого линейного алгоритма для формального исполнителя Обезьяны.
Обезьяны. Управление учебным процессом
Управление учебным процессом Макаронные изделия Makfa. Акция
Макаронные изделия Makfa. Акция Художественные промыслы Нижегородской области
Художественные промыслы Нижегородской области Золотое кольцо России город СУЗДАЛЬ
Золотое кольцо России город СУЗДАЛЬ Типы икон Богородицы
Типы икон Богородицы Диалог консультанта и клиента на примере практического случая
Диалог консультанта и клиента на примере практического случая Презентация на тему Отряд Крокодилы
Презентация на тему Отряд Крокодилы