- Управление дискретной задвижкой. Практические работы

Содержание
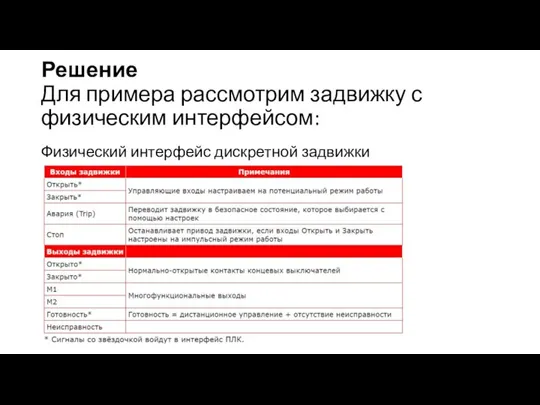
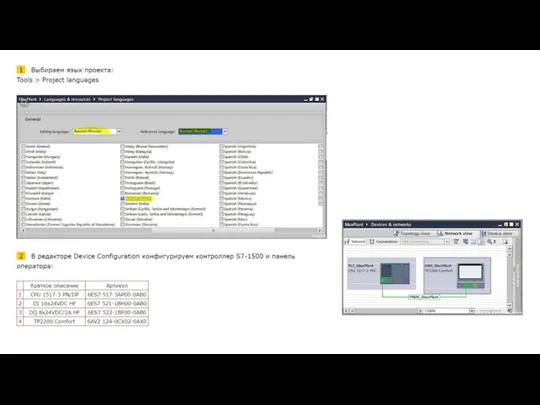
- 2. Решение Для примера рассмотрим задвижку с физическим интерфейсом: Физический интерфейс дискретной задвижки
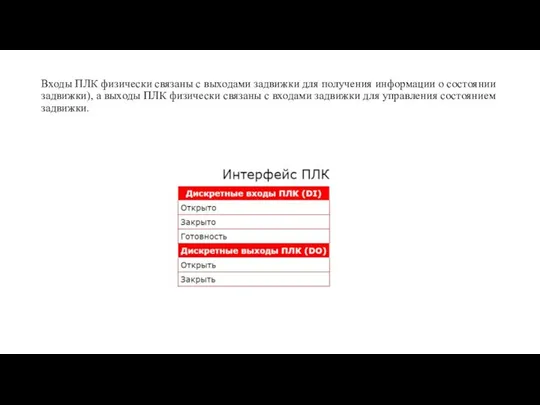
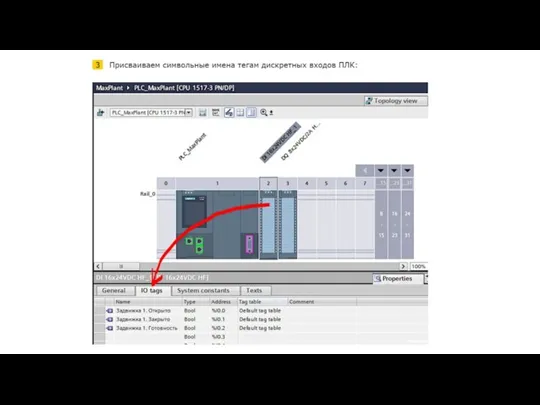
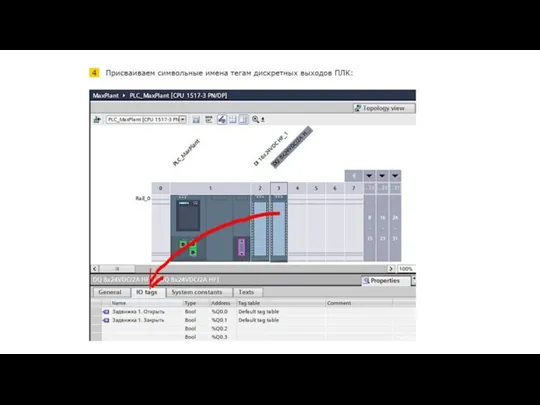
- 3. Входы ПЛК физически связаны с выходами задвижки для получения информации о состоянии задвижки), а выходы ПЛК
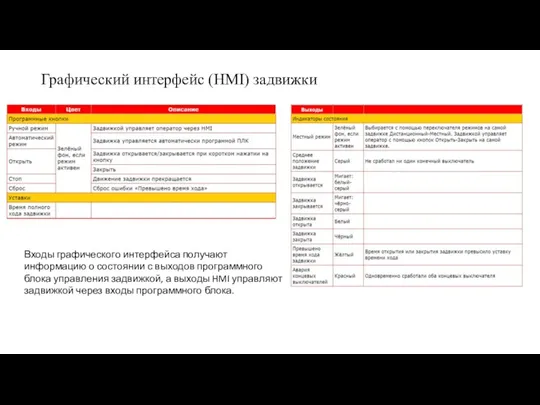
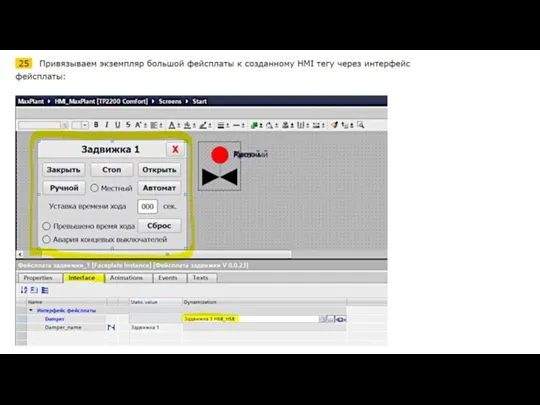
- 4. Графический интерфейс (HMI) задвижки Входы графического интерфейса получают информацию о состоянии с выходов программного блока управления
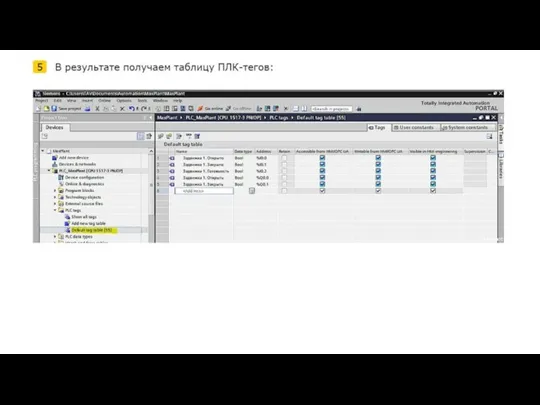
- 5. Алгоритм управления задвижкой Задвижка управляется с местного пульта (Local) или дистанционно от ПЛК (Remote). Если полевой
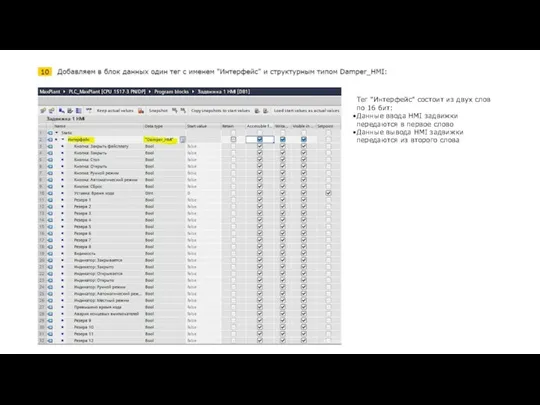
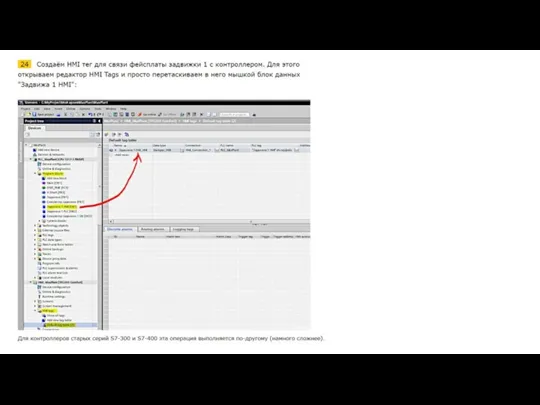
- 15. Тег "Интерфейс" состоит из двух слов по 16 бит: Данные ввода HMI задвижки передаются в первое
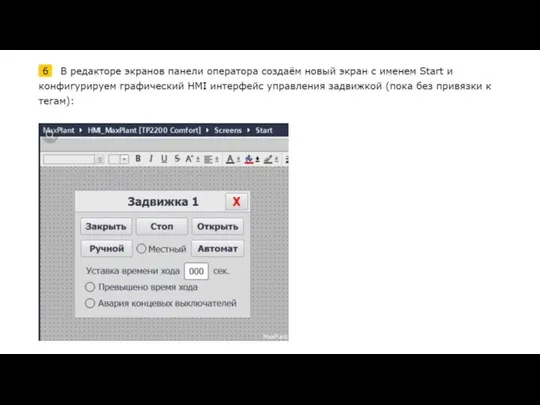
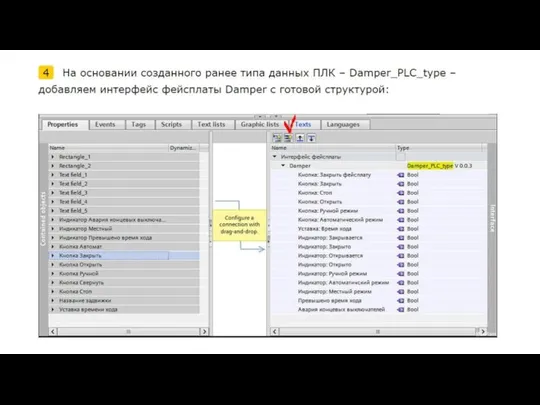
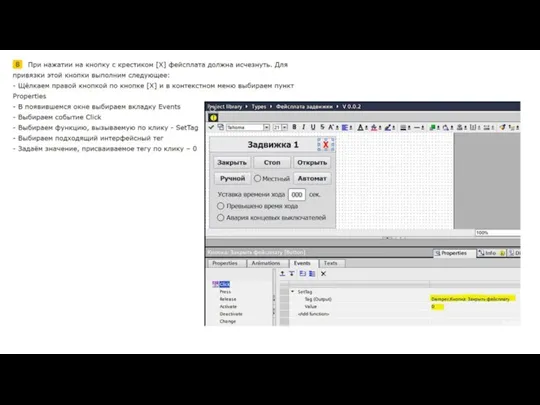
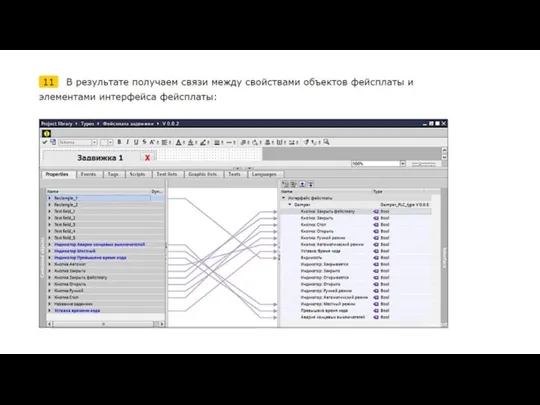
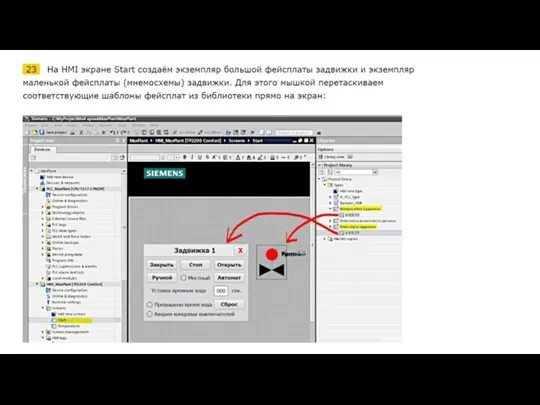
- 16. Создание фейсплаты дискретной задвижки Задание Разработать фейсплату задвижки.
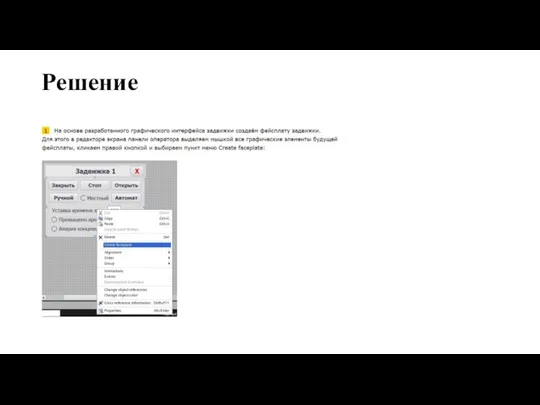
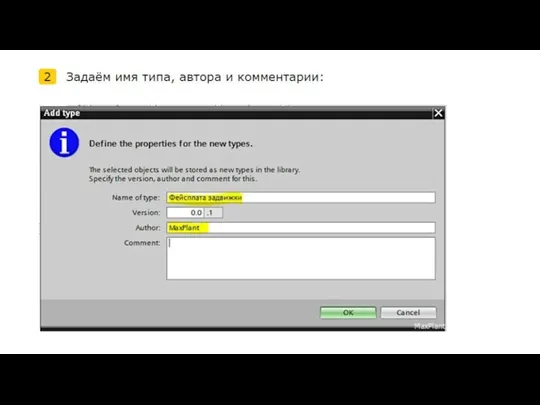
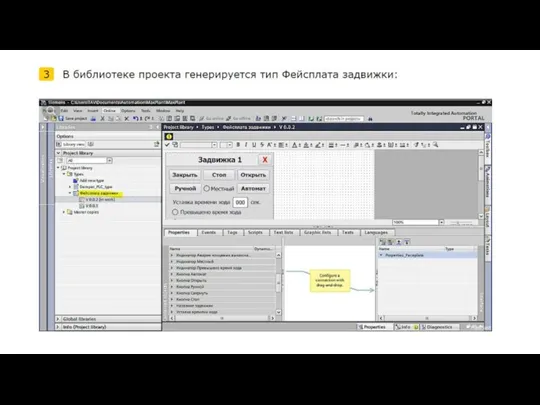
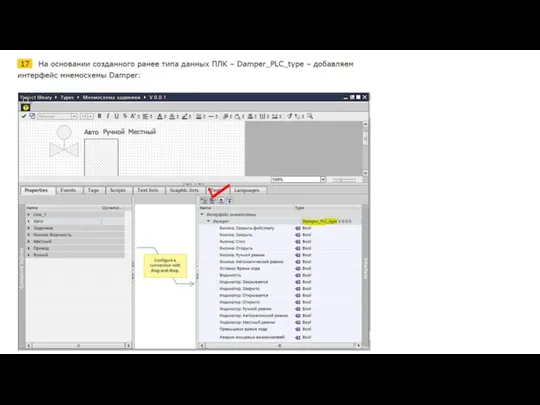
- 17. Решение
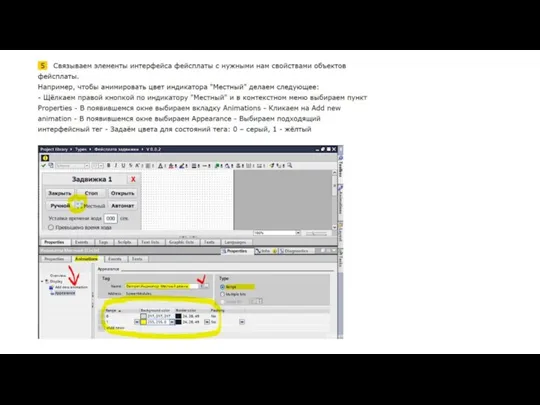
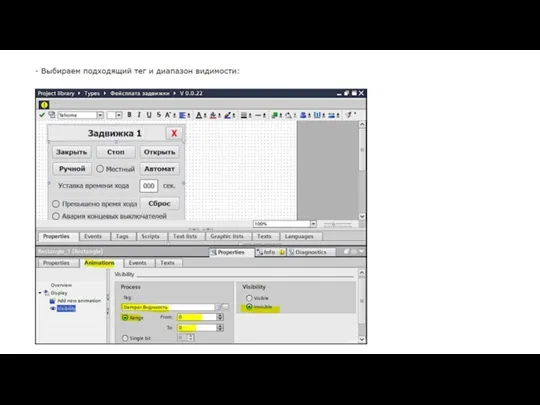
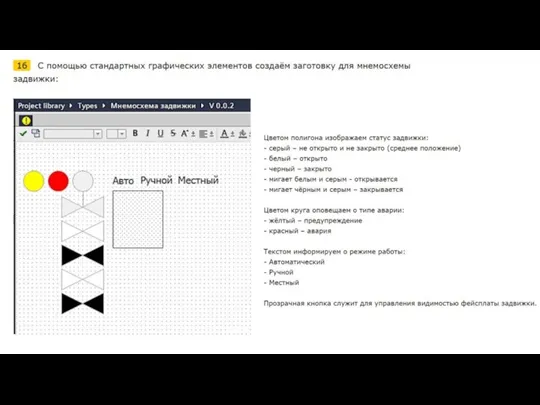
- 36. Анимацию видимости индикатора "Открыто" настраиваем по известной схеме.
- 44. Скачать презентацию
Слайд 2Решение
Для примера рассмотрим задвижку с физическим интерфейсом:
Физический интерфейс дискретной задвижки
Решение
Для примера рассмотрим задвижку с физическим интерфейсом:
Физический интерфейс дискретной задвижки
Слайд 3Входы ПЛК физически связаны с выходами задвижки для получения информации о состоянии
Входы ПЛК физически связаны с выходами задвижки для получения информации о состоянии
Слайд 4Графический интерфейс (HMI) задвижки
Входы графического интерфейса получают информацию о состоянии с выходов
Графический интерфейс (HMI) задвижки
Входы графического интерфейса получают информацию о состоянии с выходов
Слайд 5Алгоритм управления задвижкой
Задвижка управляется с местного пульта (Local) или дистанционно от ПЛК
Алгоритм управления задвижкой
Задвижка управляется с местного пульта (Local) или дистанционно от ПЛК


Слайд 15Тег "Интерфейс" состоит из двух слов по 16 бит:
Данные ввода HMI задвижки
Тег "Интерфейс" состоит из двух слов по 16 бит:
Данные ввода HMI задвижки
Слайд 16Создание фейсплаты дискретной задвижки
Задание
Разработать фейсплату задвижки.
Создание фейсплаты дискретной задвижки
Задание
Разработать фейсплату задвижки.
Слайд 17Решение
Решение


Слайд 36Анимацию видимости индикатора "Открыто" настраиваем по известной схеме.
Анимацию видимости индикатора "Открыто" настраиваем по известной схеме.


 Технический монтаж взрывозащищенных светильников
Технический монтаж взрывозащищенных светильников Нестандартные размещения в системе знакомств и общения Мамба для белорусской аудитории
Нестандартные размещения в системе знакомств и общения Мамба для белорусской аудитории Презентация на тему Описание места (6 класс)
Презентация на тему Описание места (6 класс) ВНУТРЕННЯЯ ЭНЕРГИЯ.ПЕРВЫЙ ЗАКОН ТЕРМОДИНАМИКИ.
ВНУТРЕННЯЯ ЭНЕРГИЯ.ПЕРВЫЙ ЗАКОН ТЕРМОДИНАМИКИ. ХРОНИЧЕСКИЕ БОЛЕВЫЕ СИНДРОМЫ - СОВРЕМЕННЫЕ ПОДХОДЫ К ЛЕЧЕНИЮ
ХРОНИЧЕСКИЕ БОЛЕВЫЕ СИНДРОМЫ - СОВРЕМЕННЫЕ ПОДХОДЫ К ЛЕЧЕНИЮ Кейсы Красноярский ГАУ. Компания ЭФКО
Кейсы Красноярский ГАУ. Компания ЭФКО ОТЧЁТ по производственной практике
ОТЧЁТ по производственной практике Презентация на тему Берегись автомобиля (2 класс)
Презентация на тему Берегись автомобиля (2 класс)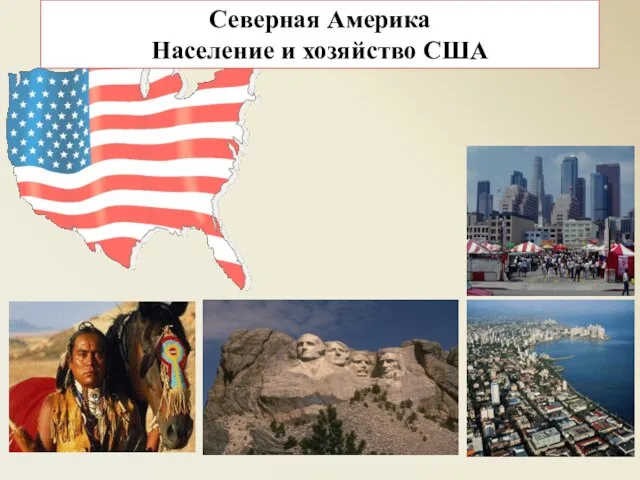 Северная Америка Население США
Северная Америка Население США Портфолио классаСОСТАВИТЕЛЬ:Куаншкалиева К.С., классный руководитель 9 класса МОУ «Волжская средняя общеобразовательная школа
Портфолио классаСОСТАВИТЕЛЬ:Куаншкалиева К.С., классный руководитель 9 класса МОУ «Волжская средняя общеобразовательная школа Film Mýtus
Film Mýtus 1 класс - презентация для начальной школы_
1 класс - презентация для начальной школы_ Об опыте работы города Барнаула в области благоустройства
Об опыте работы города Барнаула в области благоустройства Сочинение-рассуждение на лингвистическую тему 3 часть ОГЭ (15.1)
Сочинение-рассуждение на лингвистическую тему 3 часть ОГЭ (15.1) Перепись населения в вопросах и ответах
Перепись населения в вопросах и ответах Вопросы по ГП 2018
Вопросы по ГП 2018 Государственная система стандартизации
Государственная система стандартизации Lecture-1 Introduction to QOM — Fall PART 2 (1)
Lecture-1 Introduction to QOM — Fall PART 2 (1) Презентация на тему Путешествие в страну знаний
Презентация на тему Путешествие в страну знаний Альфа-Авто, редакция 5Решение для автобизнеса
Альфа-Авто, редакция 5Решение для автобизнеса Портфоліо вчителя початкових класів Пугач Світлани Миколаївни
Портфоліо вчителя початкових класів Пугач Світлани Миколаївни vgorode.ua
vgorode.ua Логистическое проектирование – разработка, внедрение, оценка экономической эффективности логических операций/функций в компании
Логистическое проектирование – разработка, внедрение, оценка экономической эффективности логических операций/функций в компании В мире животных
В мире животных Где и как здороваются
Где и как здороваются Длина. Периметр фигур
Длина. Периметр фигур БАРС. Web-Инвентаризация
БАРС. Web-Инвентаризация Туа пайда
Туа пайда