- Управление и алгоритмы

Содержание
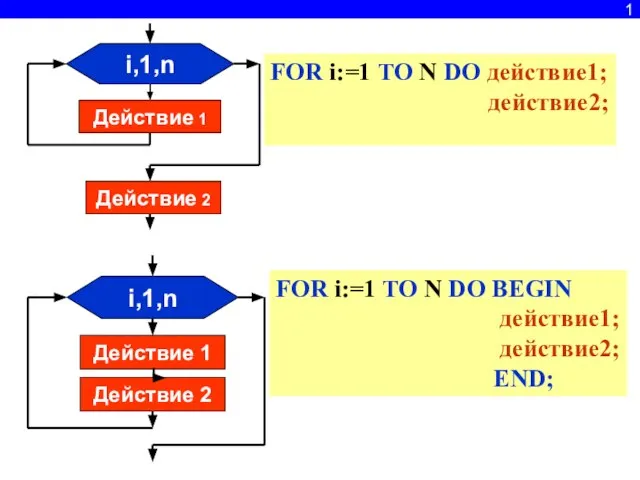
- 2. FOR i:=1 TO N DO BEGIN действие1; действие2; END; FOR i:=1 TO N DO действие1; действие2;
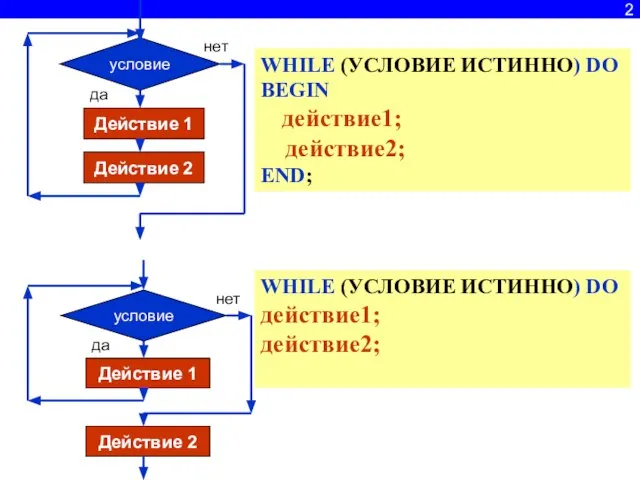
- 3. 2 WHILE (УСЛОВИЕ ИСТИННО) DO BEGIN действие1; действие2; END; WHILE (УСЛОВИЕ ИСТИННО) DO действие1; действие2;
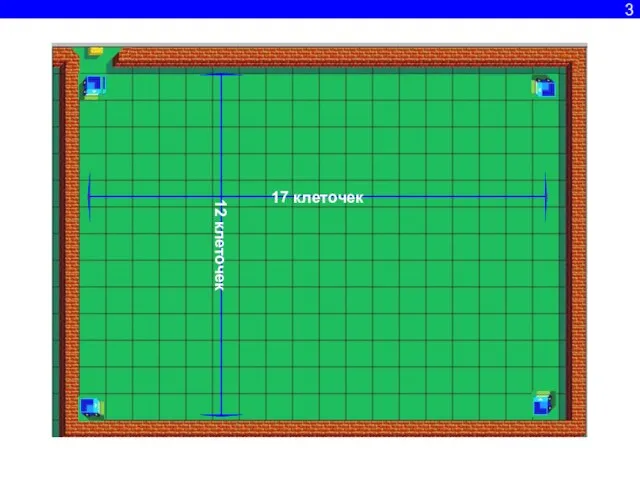
- 4. 3 17 клеточек 12 клеточек
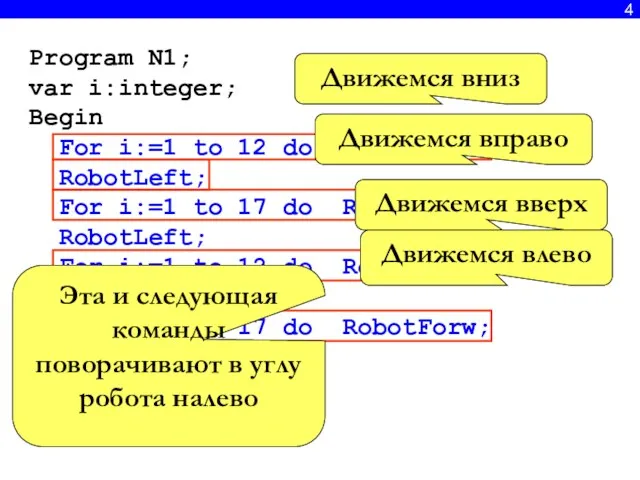
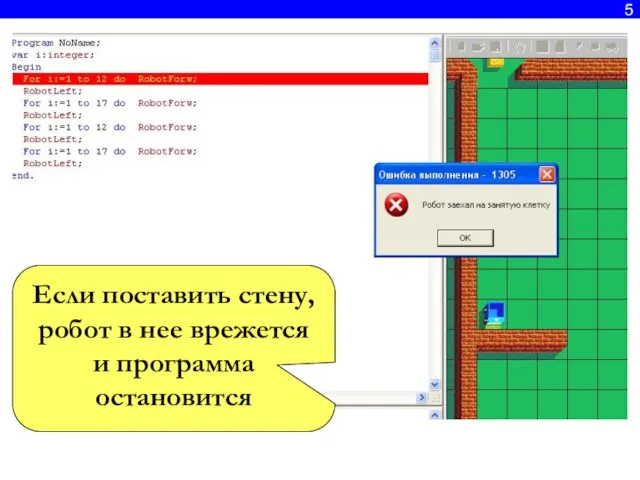
- 5. 4 Program N1; var i:integer; Begin For i:=1 to 12 do RobotForw; RobotLeft; For i:=1 to
- 6. 5 Если поставить стену, робот в нее врежется и программа остановится
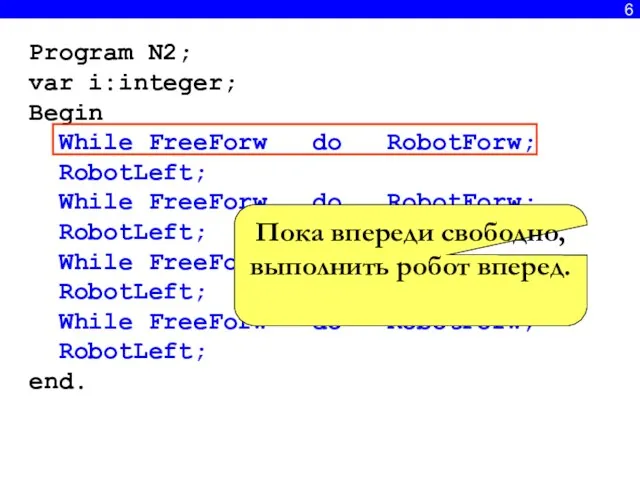
- 7. 6 Program N2; var i:integer; Begin While FreeForw do RobotForw; RobotLeft; While FreeForw do RobotForw; RobotLeft;
- 8. 7
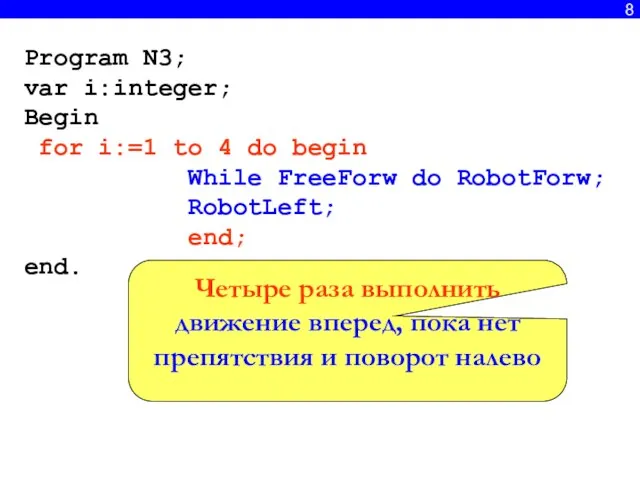
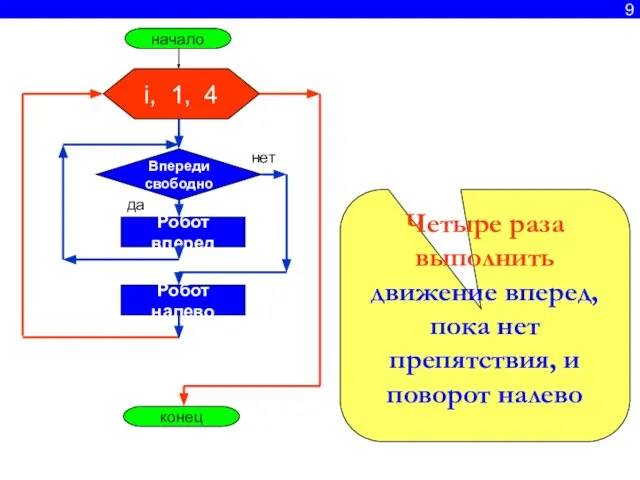
- 9. 8 Program N3; var i:integer; Begin for i:=1 to 4 do begin While FreeForw do RobotForw;
- 10. 9 Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево
- 11. 10 Задания для самостоятельной работы Задание 1. У левой стены обстановки в произвольном месте ставится препятствие.
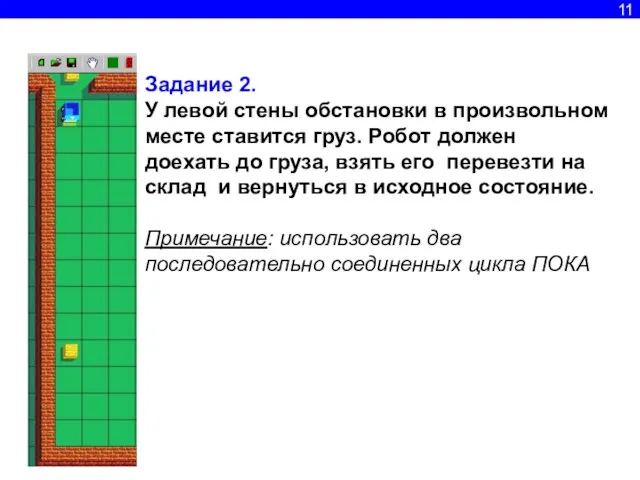
- 12. 11 Задание 2. У левой стены обстановки в произвольном месте ставится груз. Робот должен доехать до
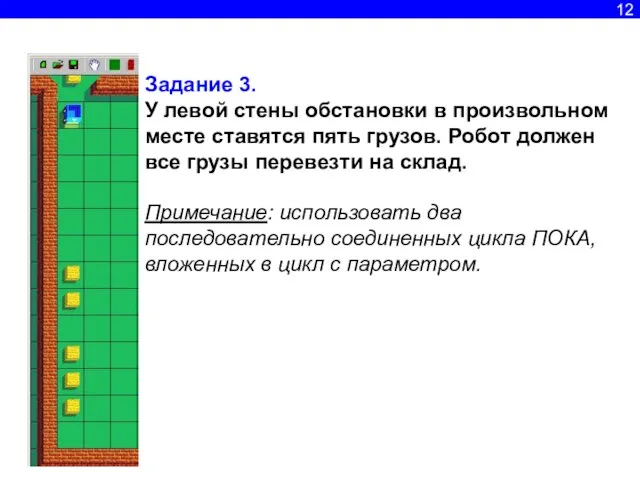
- 13. 12 Задание 3. У левой стены обстановки в произвольном месте ставятся пять грузов. Робот должен все
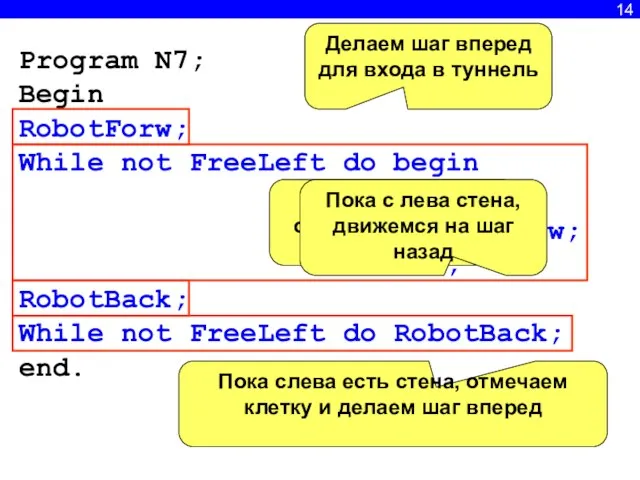
- 14. 13 Пример 1 Робот находится перед входом в коридор. Необходимо отметить все клетки внутри коридора, и
- 15. 14 Program N7; Begin RobotForw; While not FreeLeft do begin Select; RobotForw; end; RobotBack; While not
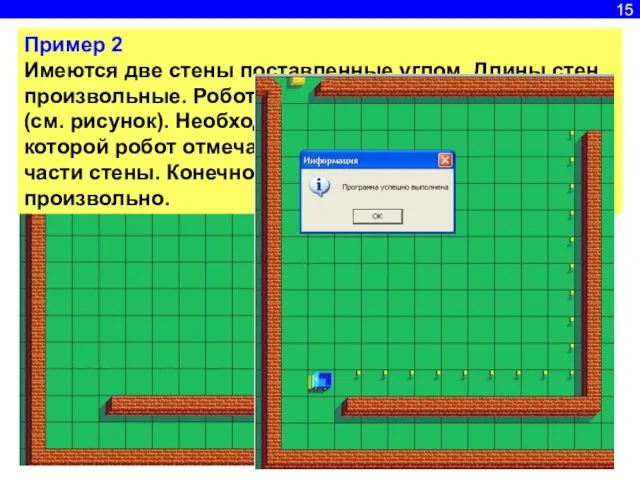
- 16. 15 Пример 2 Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в углу между
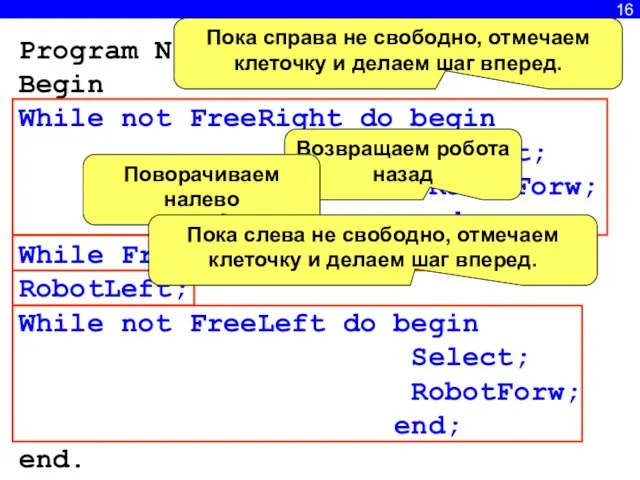
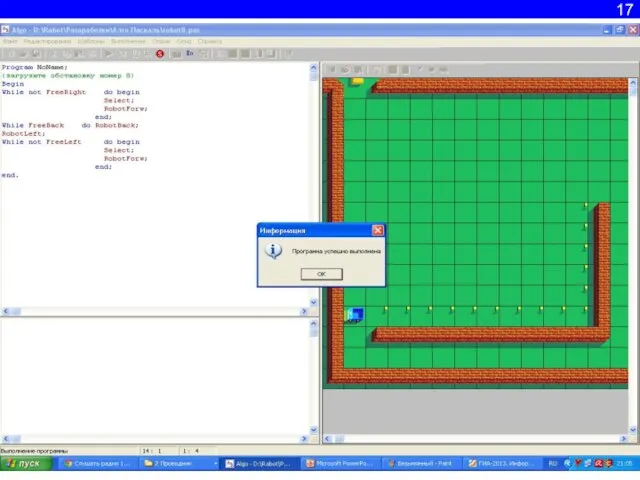
- 17. 16 Program N8; Begin While not FreeRight do begin Select; RobotForw; end; While FreeBack do RobotBack;
- 18. 17
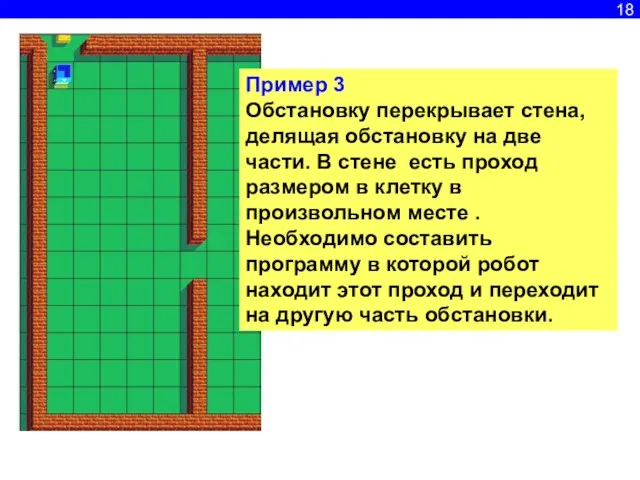
- 19. 18 Пример 3 Обстановку перекрывает стена, делящая обстановку на две части. В стене есть проход размером
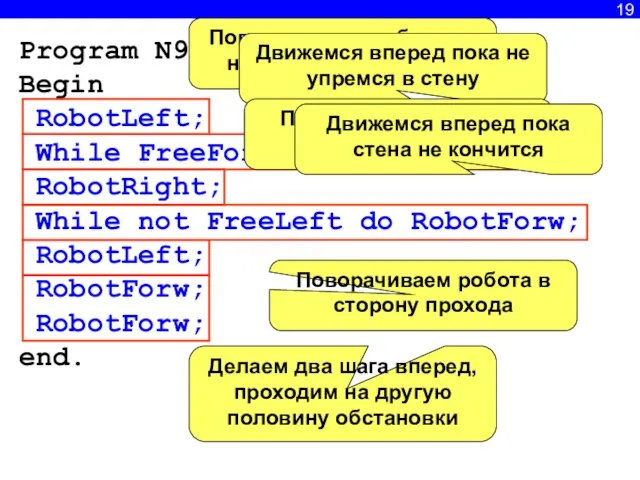
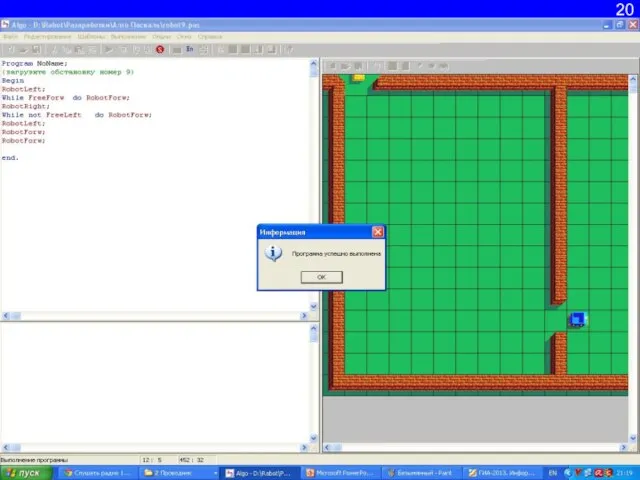
- 20. 19 Program N9; Begin RobotLeft; While FreeForw do RobotForw; RobotRight; While not FreeLeft do RobotForw; RobotLeft;
- 21. 20
- 22. 21 Задания для самостоятельной работы Задание 1. Дана стена в виде ступенек, количество ступенек произвольно. Необходимо
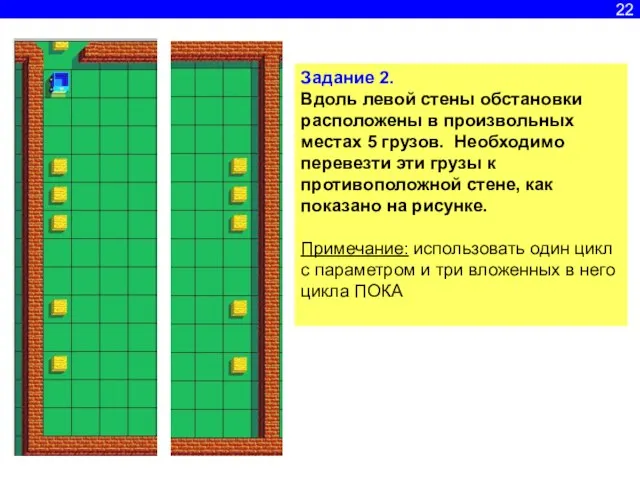
- 23. 22 Задание 2. Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо перевезти эти
- 25. Скачать презентацию
Слайд 32
WHILE (УСЛОВИЕ ИСТИННО) DO
BEGIN
действие1;
действие2;
END;
WHILE (УСЛОВИЕ ИСТИННО) DO
действие1;
действие2;
2
WHILE (УСЛОВИЕ ИСТИННО) DO
BEGIN
действие1;
действие2;
END;
WHILE (УСЛОВИЕ ИСТИННО) DO
действие1;
действие2;
Слайд 43
17 клеточек
12 клеточек
3
17 клеточек
12 клеточек
Слайд 54
Program N1;
var i:integer;
Begin
For i:=1 to 12 do RobotForw;
RobotLeft;
For
4
Program N1;
var i:integer;
Begin
For i:=1 to 12 do RobotForw;
RobotLeft;
For
Слайд 65
Если поставить стену, робот в нее врежется и программа остановится
5
Если поставить стену, робот в нее врежется и программа остановится
Слайд 76
Program N2;
var i:integer;
Begin
While FreeForw do RobotForw;
RobotLeft;
While FreeForw do
6
Program N2;
var i:integer;
Begin
While FreeForw do RobotForw;
RobotLeft;
While FreeForw do
Слайд 98
Program N3;
var i:integer;
Begin
for i:=1 to 4 do begin
While
8
Program N3;
var i:integer;
Begin
for i:=1 to 4 do begin
While
Слайд 109
Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево
9
Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево
Слайд 1110
Задания для самостоятельной работы
Задание 1.
У левой стены обстановки в произвольном месте ставится
10
Задания для самостоятельной работы
Задание 1.
У левой стены обстановки в произвольном месте ставится

Слайд 1211
Задание 2.
У левой стены обстановки в произвольном месте ставится груз. Робот должен
доехать
11
Задание 2.
У левой стены обстановки в произвольном месте ставится груз. Робот должен
доехать
Слайд 1312
Задание 3.
У левой стены обстановки в произвольном месте ставятся пять грузов. Робот
12
Задание 3.
У левой стены обстановки в произвольном месте ставятся пять грузов. Робот
Слайд 1413
Пример 1
Робот находится перед входом в коридор. Необходимо отметить все клетки внутри
13
Пример 1
Робот находится перед входом в коридор. Необходимо отметить все клетки внутри

Слайд 1514
Program N7;
Begin
RobotForw;
While not FreeLeft do begin
Select;
RobotForw;
end;
RobotBack;
While not FreeLeft
14
Program N7;
Begin
RobotForw;
While not FreeLeft do begin
Select;
RobotForw;
end;
RobotBack;
While not FreeLeft
Слайд 1615
Пример 2
Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в
15
Пример 2
Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в
Слайд 1716
Program N8;
Begin
While not FreeRight do begin
Select;
RobotForw;
end;
While FreeBack do
16
Program N8;
Begin
While not FreeRight do begin
Select;
RobotForw;
end;
While FreeBack do
Слайд 1817
17
Слайд 1918
Пример 3
Обстановку перекрывает стена, делящая обстановку на две части. В стене есть
18
Пример 3
Обстановку перекрывает стена, делящая обстановку на две части. В стене есть
Слайд 2019
Program N9;
Begin
RobotLeft;
While FreeForw do RobotForw;
RobotRight;
While not FreeLeft
19
Program N9;
Begin
RobotLeft;
While FreeForw do RobotForw;
RobotRight;
While not FreeLeft
Слайд 2120
20
Слайд 2221
Задания для самостоятельной работы
Задание 1.
Дана стена в виде ступенек, количество ступенек произвольно.
21
Задания для самостоятельной работы
Задание 1.
Дана стена в виде ступенек, количество ступенек произвольно.

Слайд 2322
Задание 2.
Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо
22
Задание 2.
Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо
 Поликультурное образование. Формирование идентичности обучающихся средствами курса ОРКСЭ
Поликультурное образование. Формирование идентичности обучающихся средствами курса ОРКСЭ Стратегический анализ транспортно-пересадочных узлов города Москвы
Стратегический анализ транспортно-пересадочных узлов города Москвы Вернуться из леса (2)
Вернуться из леса (2) Абсолютные и относительные величины
Абсолютные и относительные величины  Компьютерные презентации Мультимедийные технологии
Компьютерные презентации Мультимедийные технологии Mersedes-Vito
Mersedes-Vito Качество и уровень жизни. Бюджет прожиточного минимума. Потребительская корзина
Качество и уровень жизни. Бюджет прожиточного минимума. Потребительская корзина Техническое регулирование в строительстве. Системы стандартизации и добровольной оценки соответствия НОСТРОЙ.
Техническое регулирование в строительстве. Системы стандартизации и добровольной оценки соответствия НОСТРОЙ. Автоматика судовых энергетических установок и вспомогательных механизмов практика
Автоматика судовых энергетических установок и вспомогательных механизмов практика Классификация и оценка рисков
Классификация и оценка рисков Ранние половые связи подростков. Родительское собрание
Ранние половые связи подростков. Родительское собрание Как задавать домашнее задание?
Как задавать домашнее задание? Я0зык
Я0зык Собственные и нарицательные имена существительные
Собственные и нарицательные имена существительные Динамика точки
Динамика точки Модульный урок«Атомы химических элементов. Структура Периодической системы»
Модульный урок«Атомы химических элементов. Структура Периодической системы» B i l d e n d e K u n s t
B i l d e n d e K u n s t Орфографическая минутка
Орфографическая минутка Внутренние воды Южной Америки
Внутренние воды Южной Америки Презентация на тему Патриоты России (4 класс)
Презентация на тему Патриоты России (4 класс) Сказка о возвращенном времени. Кто они, герои картин В.И.Сурикова?
Сказка о возвращенном времени. Кто они, герои картин В.И.Сурикова? Реклама в мобильных приложениях. Коммерческое предложение для СМИ
Реклама в мобильных приложениях. Коммерческое предложение для СМИ Манипуляции в общении и переговорах Изобретательностью и умом побеждать лучше, чем сопротивлением
Манипуляции в общении и переговорах Изобретательностью и умом побеждать лучше, чем сопротивлением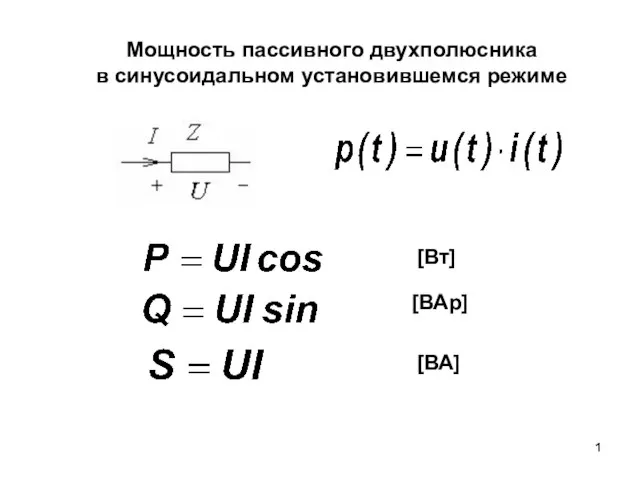 Мощность пассивного двухполюсника в синусоидальном установившемся режиме
Мощность пассивного двухполюсника в синусоидальном установившемся режиме Источники и институты классического средневекового права
Источники и институты классического средневекового права Солнечногорск
Солнечногорск Мы открыты для сотрудничества. АНО Начинающий фермер, Семейная животноводческая ферма
Мы открыты для сотрудничества. АНО Начинающий фермер, Семейная животноводческая ферма Pop-up формат. Временная розничная торговля
Pop-up формат. Временная розничная торговля