- Ю.Б. Блохинов, В.В. Гнилицкий, В. В. Инсаров, А.С. Чернявский ФГУП «ГосНИИАС», Москва

Содержание
- 2. Постановка задачи Существуют 3D модели ряда наземных объектов, формирующих сцену Имеется цифровое текущее изображение (ТИ), полученное
- 3. Модель
- 4. По имеющейся информации о точке съемки генерируется конкретный вид эталона объекта ТИ
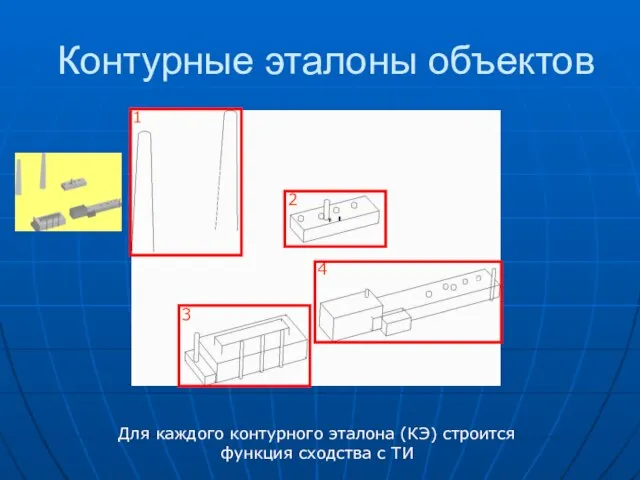
- 5. Контурные эталоны объектов 1 2 3 4 Для каждого контурного эталона (КЭ) строится функция сходства с
- 6. Предобработка ТИ
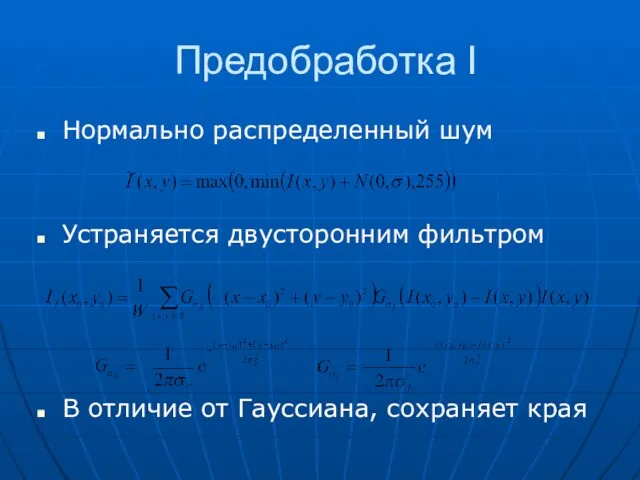
- 7. Предобработка I Нормально распределенный шум Устраняется двусторонним фильтром В отличие от Гауссиана, сохраняет края
- 8. Нормально-распределенный шум - двусторонний фильтр - до фильтрации
- 9. после фильтрации Нормально-распределенный шум - двусторонний фильтр -
- 10. Предобработка II Импульсный шум («соль-перец») Устраняется медианной фильтрацией с адаптивным окном Лучше, чем обычная медиана, справляется
- 11. до фильтрации Импульсный шум - адаптивная медиана -
- 12. после фильтрации Импульсный шум - адаптивная медиана -
- 13. Поиск объекта
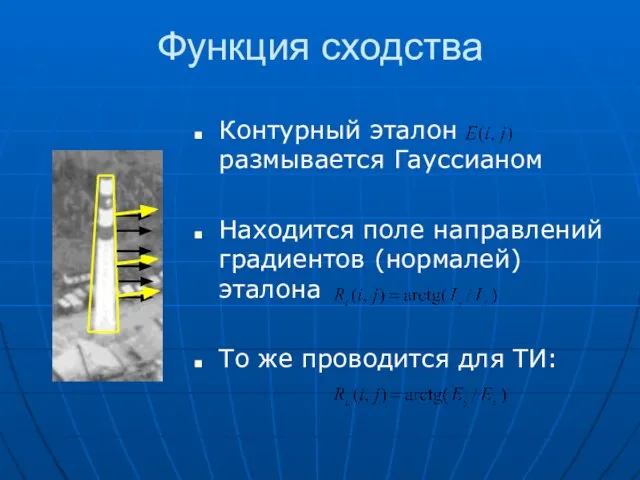
- 14. Функция сходства Контурный эталон размывается Гауссианом Находится поле направлений градиентов (нормалей) эталона То же проводится для
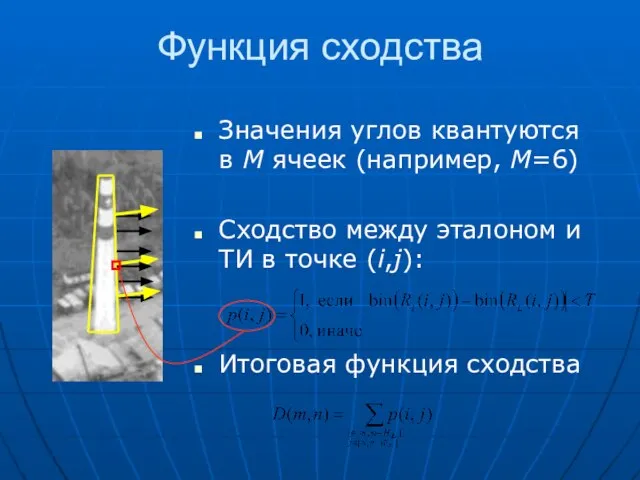
- 15. Функция сходства Значения углов квантуются в M ячеек (например, M=6) Сходство между эталоном и ТИ в
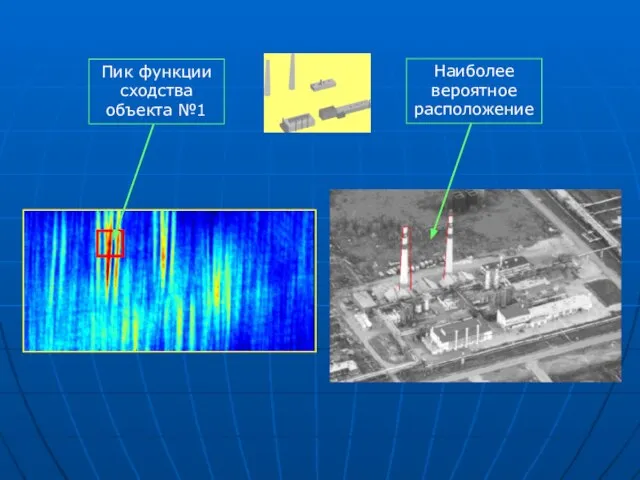
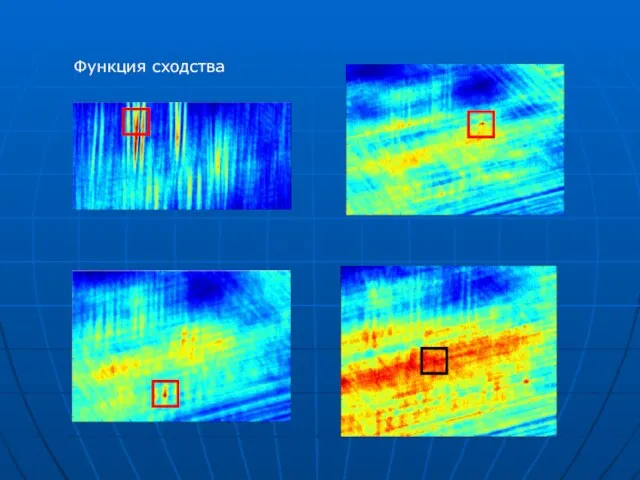
- 16. Пик функции сходства объекта №1 Наиболее вероятное расположение
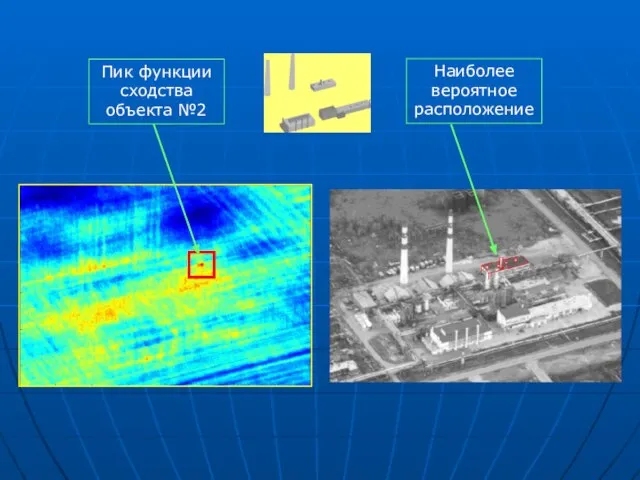
- 17. Пик функции сходства объекта №2 Наиболее вероятное расположение
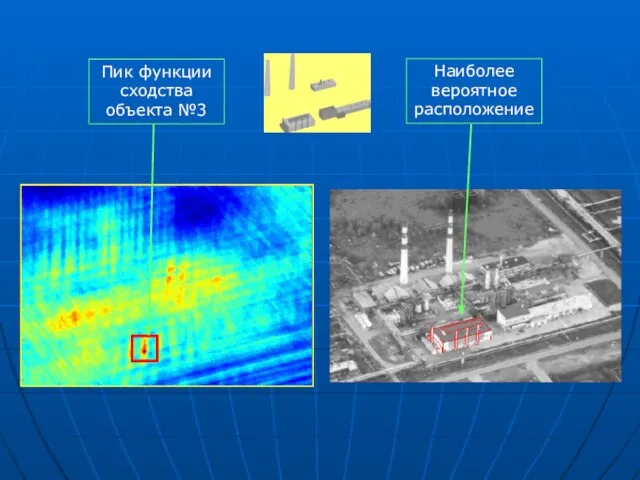
- 18. Пик функции сходства объекта №3 Наиболее вероятное расположение
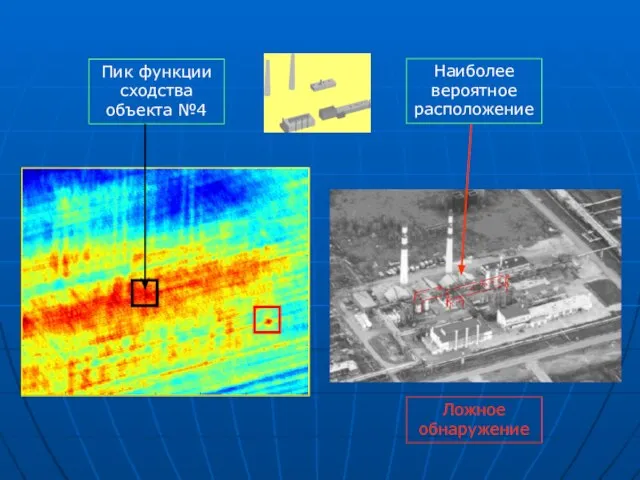
- 19. Пик функции сходства объекта №4 Наиболее вероятное расположение Ложное обнаружение
- 20. Сборка сцены
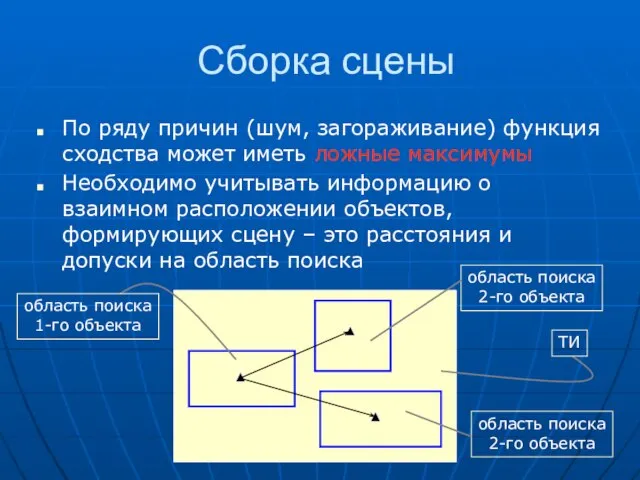
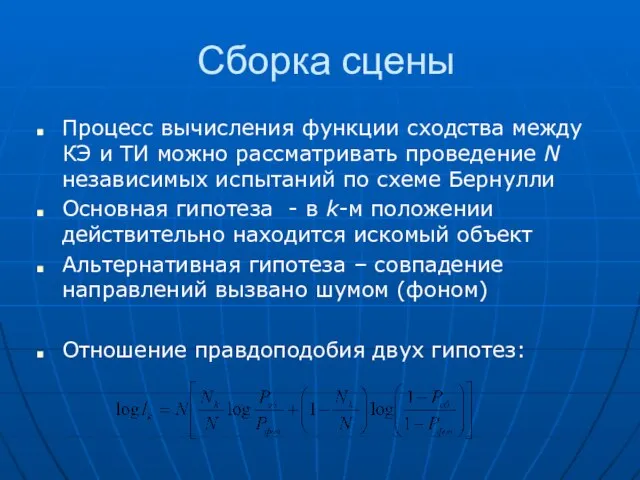
- 21. Сборка сцены По ряду причин (шум, загораживание) функция сходства может иметь ложные максимумы Необходимо учитывать информацию
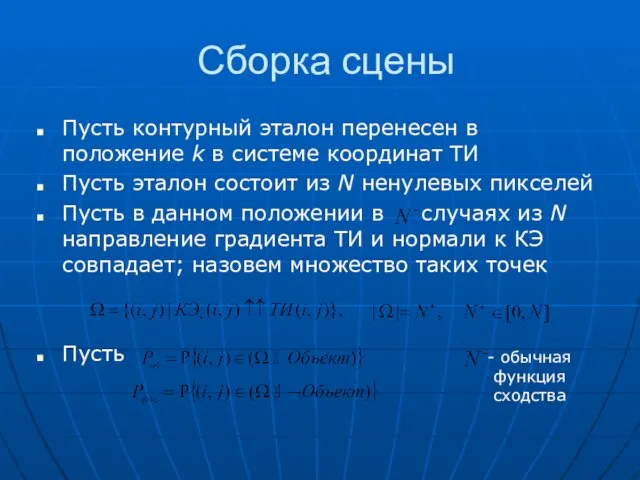
- 22. Сборка сцены Пусть контурный эталон перенесен в положение k в системе координат ТИ Пусть эталон состоит
- 23. Сборка сцены Процесс вычисления функции сходства между КЭ и ТИ можно рассматривать проведение N независимых испытаний
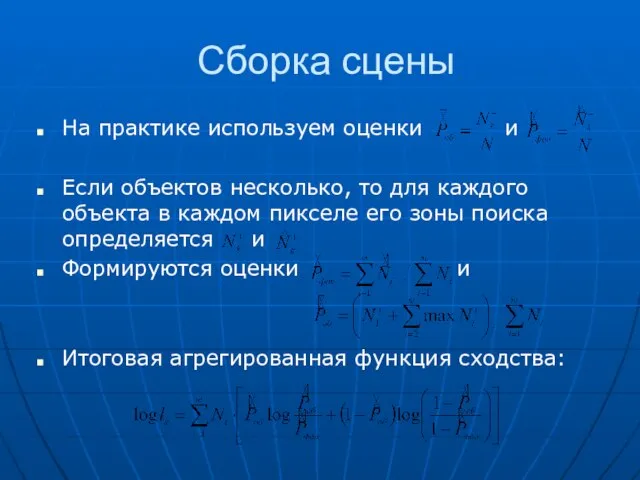
- 24. Сборка сцены На практике используем оценки и Если объектов несколько, то для каждого объекта в каждом
- 25. Функция сходства
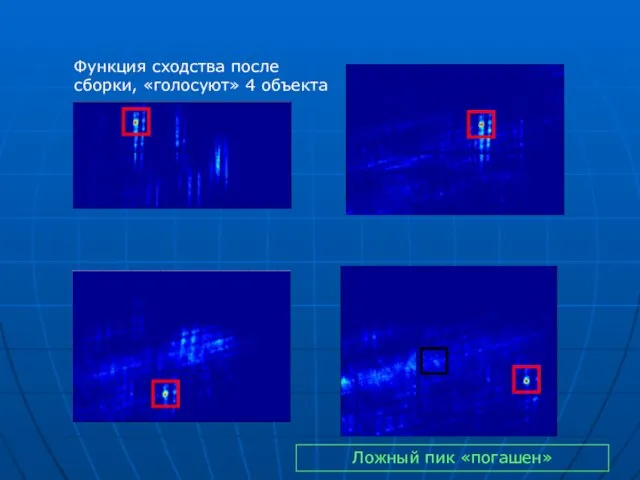
- 26. Функция сходства после сборки, «голосуют» 4 объекта Ложный пик «погашен»
- 27. Учет информации о взаимном расстоянии между объектами позволил точно локализовать искомые объекты
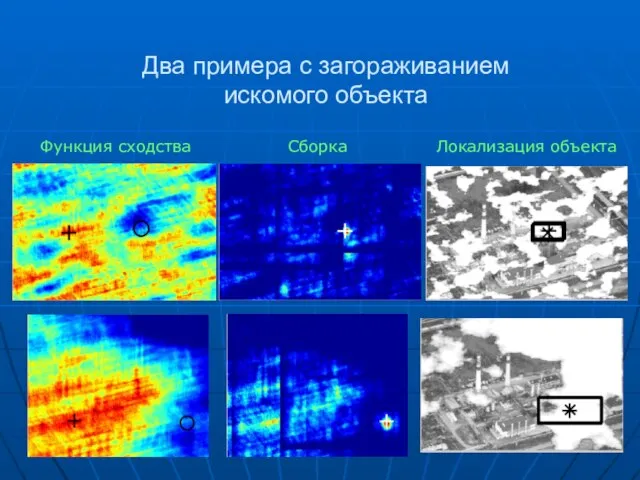
- 28. Два примера с загораживанием искомого объекта Функция сходства Сборка Локализация объекта
- 30. Скачать презентацию
Слайд 2Постановка задачи
Существуют 3D модели ряда наземных объектов, формирующих сцену
Имеется цифровое текущее изображение
Постановка задачи
Существуют 3D модели ряда наземных объектов, формирующих сцену
Имеется цифровое текущее изображение
Слайд 3Модель
Модель

Слайд 4По имеющейся информации о точке съемки генерируется конкретный вид эталона объекта
ТИ
По имеющейся информации о точке съемки генерируется конкретный вид эталона объекта
ТИ

Слайд 5Контурные эталоны объектов
1
2
3
4
Для каждого контурного эталона (КЭ) строится функция сходства с ТИ
Контурные эталоны объектов
1
2
3
4
Для каждого контурного эталона (КЭ) строится функция сходства с ТИ
Слайд 6Предобработка ТИ
Предобработка ТИ
Слайд 7Предобработка I
Нормально распределенный шум
Устраняется двусторонним фильтром
В отличие от Гауссиана, сохраняет края
Предобработка I
Нормально распределенный шум
Устраняется двусторонним фильтром
В отличие от Гауссиана, сохраняет края
Слайд 8Нормально-распределенный шум
- двусторонний фильтр -
до фильтрации
Нормально-распределенный шум
- двусторонний фильтр -
до фильтрации

Слайд 9после фильтрации
Нормально-распределенный шум
- двусторонний фильтр -
после фильтрации
Нормально-распределенный шум
- двусторонний фильтр -

Слайд 10Предобработка II
Импульсный шум («соль-перец»)
Устраняется медианной фильтрацией с адаптивным окном
Лучше, чем обычная медиана,
Предобработка II
Импульсный шум («соль-перец»)
Устраняется медианной фильтрацией с адаптивным окном
Лучше, чем обычная медиана,
Слайд 11до фильтрации
Импульсный шум
- адаптивная медиана -
до фильтрации
Импульсный шум
- адаптивная медиана -

Слайд 12после фильтрации
Импульсный шум
- адаптивная медиана -
после фильтрации
Импульсный шум
- адаптивная медиана -

Слайд 13Поиск объекта
Поиск объекта

Слайд 14Функция сходства
Контурный эталон размывается Гауссианом
Находится поле направлений градиентов (нормалей) эталона
То же проводится
Функция сходства
Контурный эталон размывается Гауссианом
Находится поле направлений градиентов (нормалей) эталона
То же проводится
Слайд 15Функция сходства
Значения углов квантуются в M ячеек (например, M=6)
Сходство между эталоном и
Функция сходства
Значения углов квантуются в M ячеек (например, M=6)
Сходство между эталоном и
Слайд 16Пик функции
сходства объекта №1
Наиболее вероятное расположение
Пик функции
сходства объекта №1
Наиболее вероятное расположение
Слайд 17Пик функции
сходства объекта №2
Наиболее вероятное расположение
Пик функции
сходства объекта №2
Наиболее вероятное расположение
Слайд 18Пик функции
сходства объекта №3
Наиболее вероятное расположение
Пик функции
сходства объекта №3
Наиболее вероятное расположение
Слайд 19Пик функции
сходства объекта №4
Наиболее вероятное расположение
Ложное обнаружение
Пик функции
сходства объекта №4
Наиболее вероятное расположение
Ложное обнаружение
Слайд 20Сборка сцены
Сборка сцены
Слайд 21Сборка сцены
По ряду причин (шум, загораживание) функция сходства может иметь ложные максимумы
Необходимо
Сборка сцены
По ряду причин (шум, загораживание) функция сходства может иметь ложные максимумы
Необходимо
Слайд 22Сборка сцены
Пусть контурный эталон перенесен в положение k в системе координат ТИ
Пусть
Сборка сцены
Пусть контурный эталон перенесен в положение k в системе координат ТИ
Пусть
Слайд 23Сборка сцены
Процесс вычисления функции сходства между КЭ и ТИ можно рассматривать проведение
Сборка сцены
Процесс вычисления функции сходства между КЭ и ТИ можно рассматривать проведение
Слайд 24Сборка сцены
На практике используем оценки и
Если объектов несколько, то для каждого объекта
Сборка сцены
На практике используем оценки и
Если объектов несколько, то для каждого объекта
Слайд 25Функция сходства
Функция сходства
Слайд 26Функция сходства после сборки, «голосуют» 4 объекта
Ложный пик «погашен»
Функция сходства после сборки, «голосуют» 4 объекта
Ложный пик «погашен»
Слайд 27Учет информации о взаимном расстоянии между объектами позволил точно локализовать искомые объекты
Учет информации о взаимном расстоянии между объектами позволил точно локализовать искомые объекты

Слайд 28Два примера с загораживанием
искомого объекта
Функция сходства
Сборка
Локализация объекта
Два примера с загораживанием
искомого объекта
Функция сходства
Сборка
Локализация объекта
 Мои права и обязанности
Мои права и обязанности Версальско- вашингтонская система
Версальско- вашингтонская система Татьяна Сигаловская
Татьяна Сигаловская МБДОУ д/с «Колосок» села Березовка 1-я
МБДОУ д/с «Колосок» села Березовка 1-я Прощай,Азбука!
Прощай,Азбука! 1С:Предприятие 8. Управление сервисным центром
1С:Предприятие 8. Управление сервисным центром Территория автоматизации региональных систем ЗАГС РФ на базе программного комплекса «Находка-ЗАГС» г. Москва | г. Байконур Алтайск
Территория автоматизации региональных систем ЗАГС РФ на базе программного комплекса «Находка-ЗАГС» г. Москва | г. Байконур Алтайск Виды корней. Типы корневых систем
Виды корней. Типы корневых систем Судебная экспертиза
Судебная экспертиза Презентация на тему Краснодарский край город Армавир
Презентация на тему Краснодарский край город Армавир  Москва
Москва Этапы отработки входящего звонка. Академия ИТС по продажам сервисов 1С
Этапы отработки входящего звонка. Академия ИТС по продажам сервисов 1С Гармония в разнообразии: представление о психологических различиях между людьми
Гармония в разнообразии: представление о психологических различиях между людьми Святая мать добром спасет
Святая мать добром спасет Праздник Великой Масленицы в Туранском доме культуры
Праздник Великой Масленицы в Туранском доме культуры Итоги участия в региональном конкурсе исследовательских работ
Итоги участия в региональном конкурсе исследовательских работ Школы менеджмента
Школы менеджмента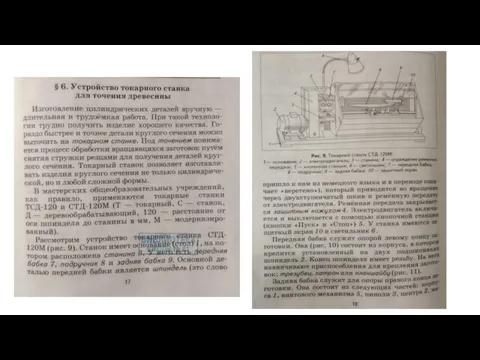 Устройство токарного станка для точения древесины
Устройство токарного станка для точения древесины Instruction Manual LX-LC200 toyota ANDROID INTERFACE
Instruction Manual LX-LC200 toyota ANDROID INTERFACE Презентация на тему: Тренажёр «Английский – с ветерком»
Презентация на тему: Тренажёр «Английский – с ветерком» Мобильная энергия города Get Energy
Мобильная энергия города Get Energy Lara wird
Lara wird Портрет одного слова
Портрет одного слова Международные правовые документы
Международные правовые документы Бизнес-акселератор Деловая Сибирь
Бизнес-акселератор Деловая Сибирь Управляем многоквартирным домом правильно!
Управляем многоквартирным домом правильно! System of government of Lebanon
System of government of Lebanon 21 марта. Классная работа. Тема урока: «Методическая система учителя истории и обществознания МОУ СОШ 1 Штомпель Г.Г»
21 марта. Классная работа. Тема урока: «Методическая система учителя истории и обществознания МОУ СОШ 1 Штомпель Г.Г»