- Аналитическая механика. Обобщенные координаты. Уравнения связей. Возможные перемещения

Содержание
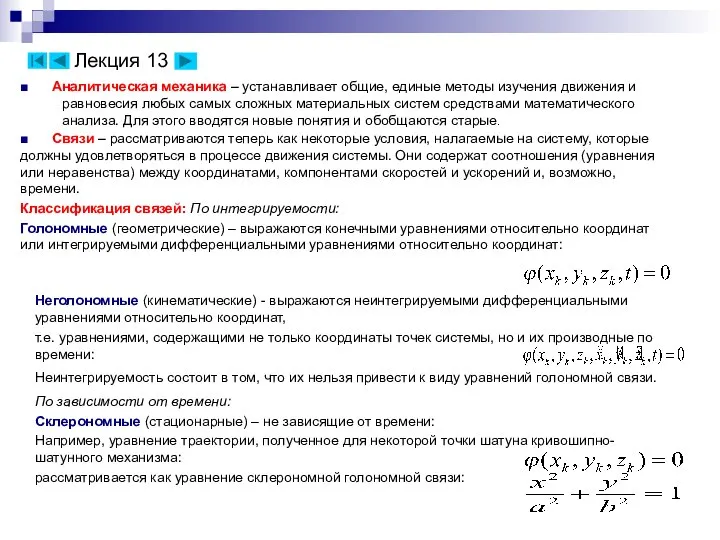
- 2. Лекция 13 ■ Аналитическая механика – устанавливает общие, единые методы изучения движения и равновесия любых самых
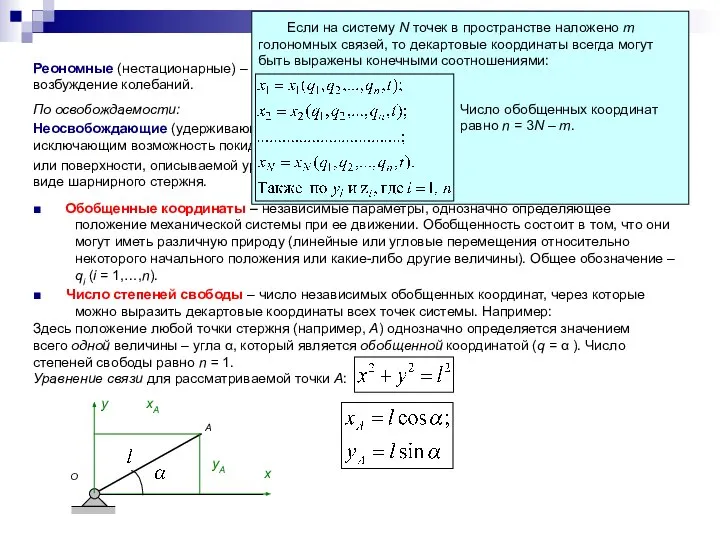
- 3. Реономные (нестационарные) – зависящие от времени. Например, кинематическое возбуждение колебаний. По освобождаемости: Неосвобождающие (удерживающие или двухсторонние)
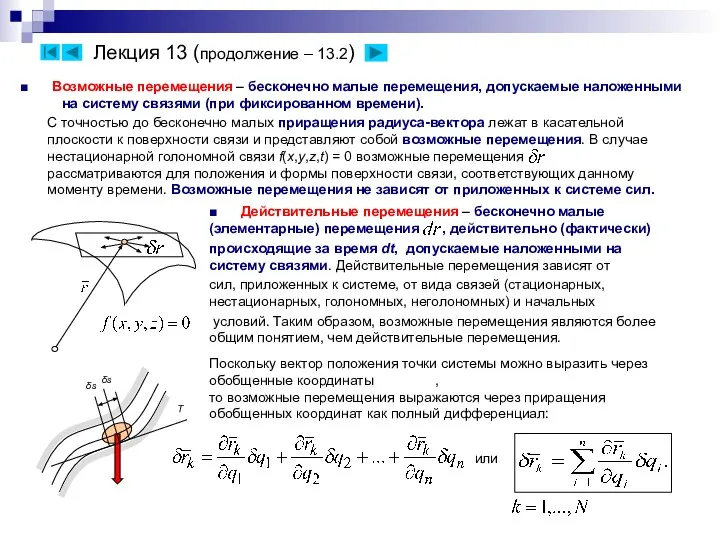
- 4. Лекция 13 (продолжение – 13.2) ■ Возможные перемещения – бесконечно малые перемещения, допускаемые наложенными на систему
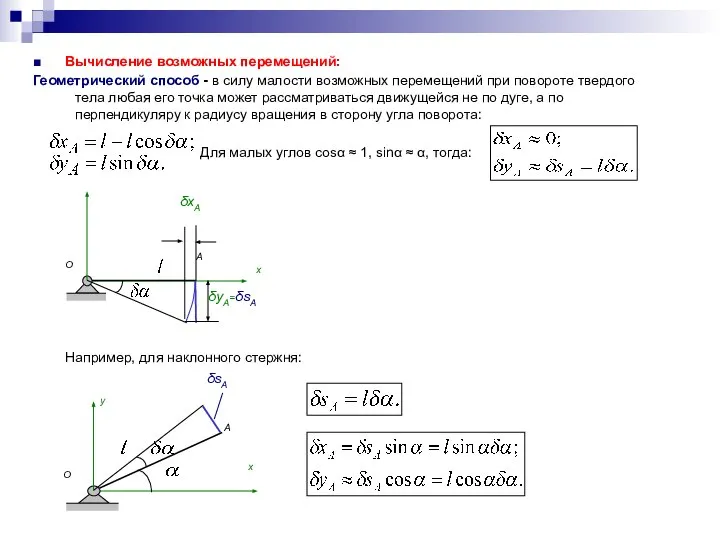
- 5. ■ Вычисление возможных перемещений: Геометрический способ - в силу малости возможных перемещений при повороте твердого тела
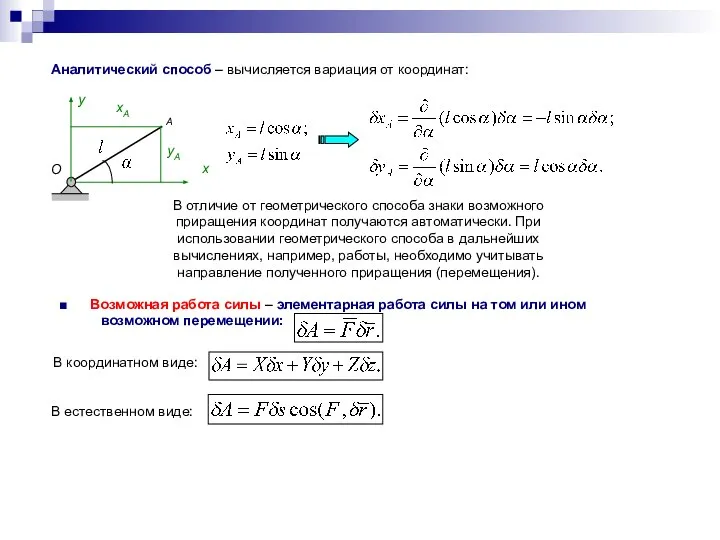
- 6. Аналитический способ – вычисляется вариация от координат: В отличие от геометрического способа знаки возможного приращения координат
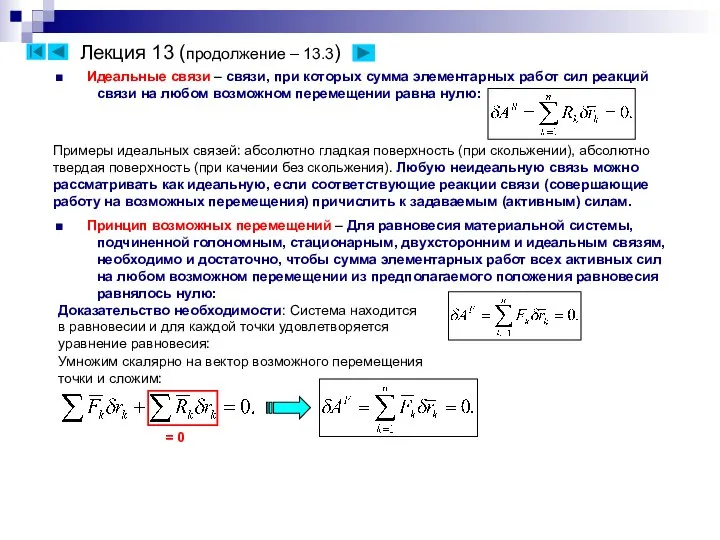
- 7. Лекция 13 (продолжение – 13.3) ■ Идеальные связи – связи, при которых сумма элементарных работ сил
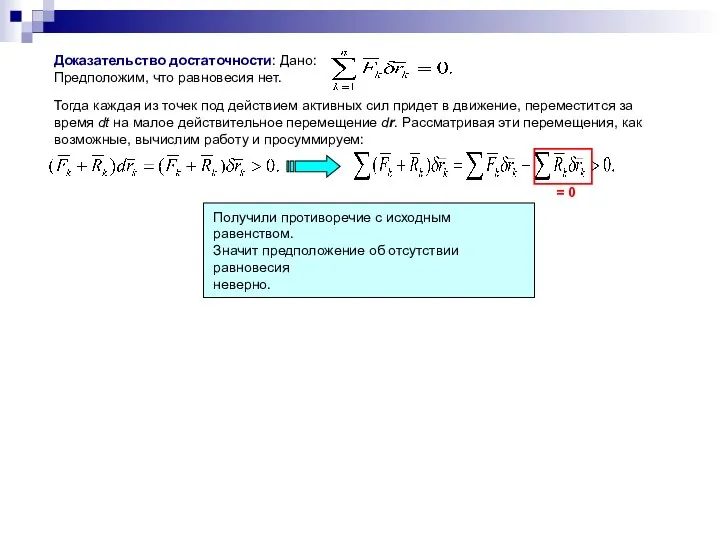
- 8. Доказательство достаточности: Дано: Предположим, что равновесия нет. Тогда каждая из точек под действием активных сил придет
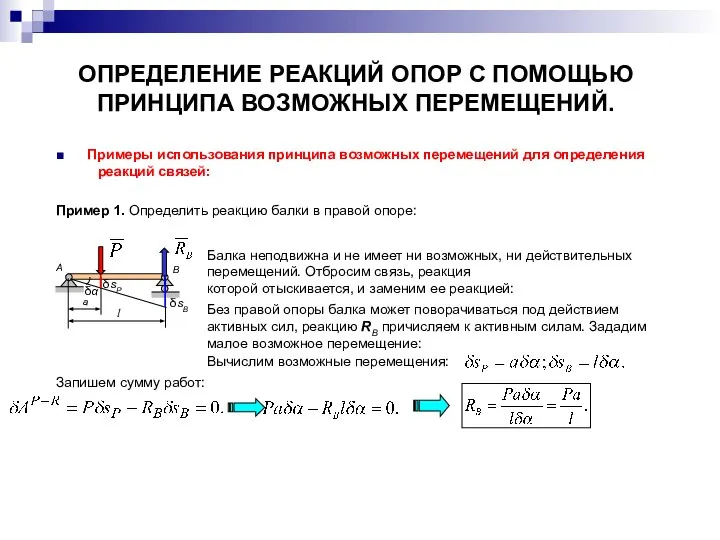
- 9. ■ Примеры использования принципа возможных перемещений для определения реакций связей: Пример 1. Определить реакцию балки в
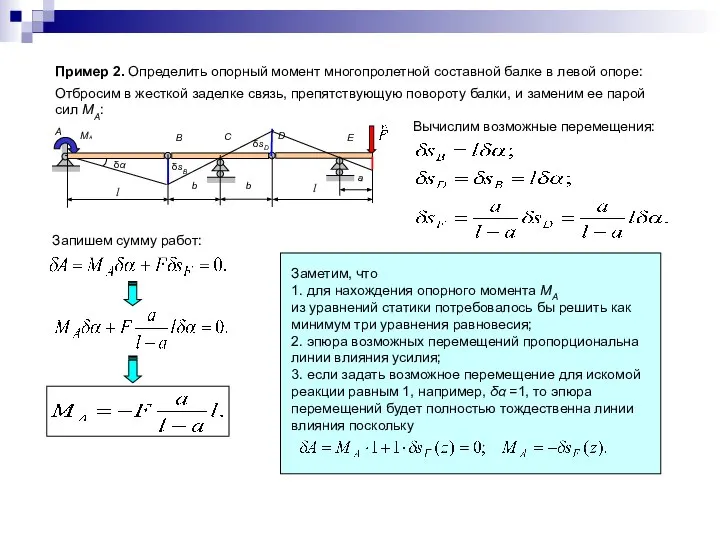
- 10. Пример 2. Определить опорный момент многопролетной составной балке в левой опоре: Отбросим в жесткой заделке связь,
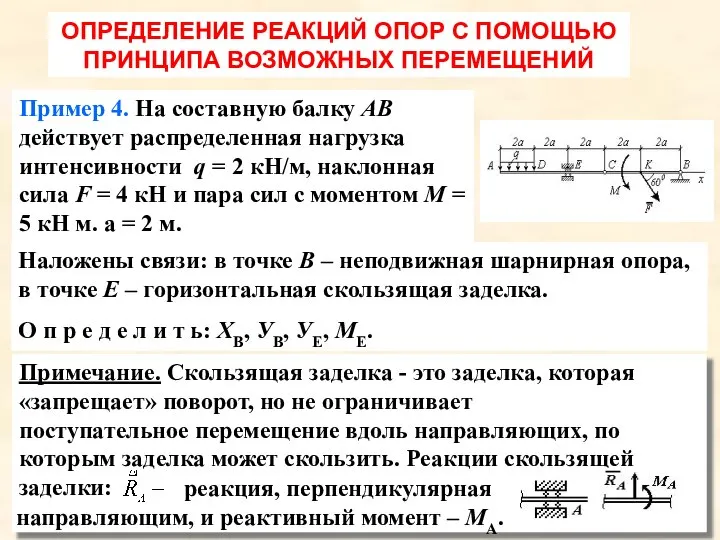
- 11. Примечание. Скользящая заделка - это заделка, которая «запрещает» поворот, но не ограничивает поступательное перемещение вдоль направляющих,
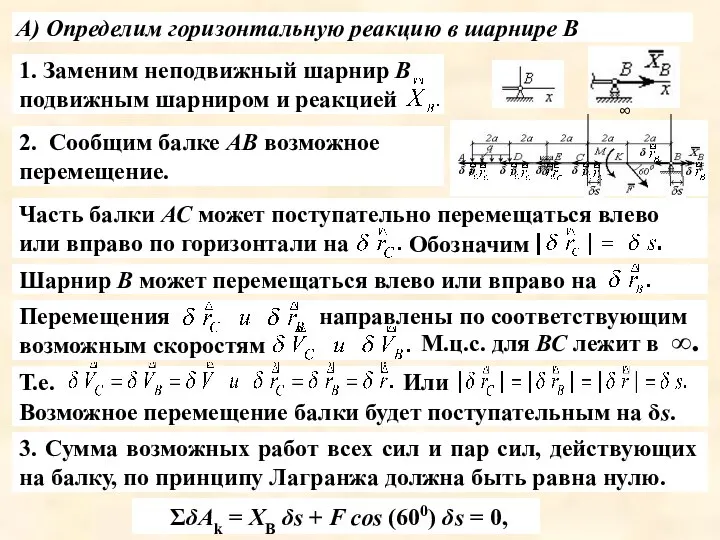
- 12. Перемещения направлены по соответствующим возможным скоростям А) Определим горизонтальную реакцию в шарнире В 1. Заменим неподвижный
- 13. Поделим уравнение (1) на δs ≠ 0 и получим XВ + F cos (600) = 0.
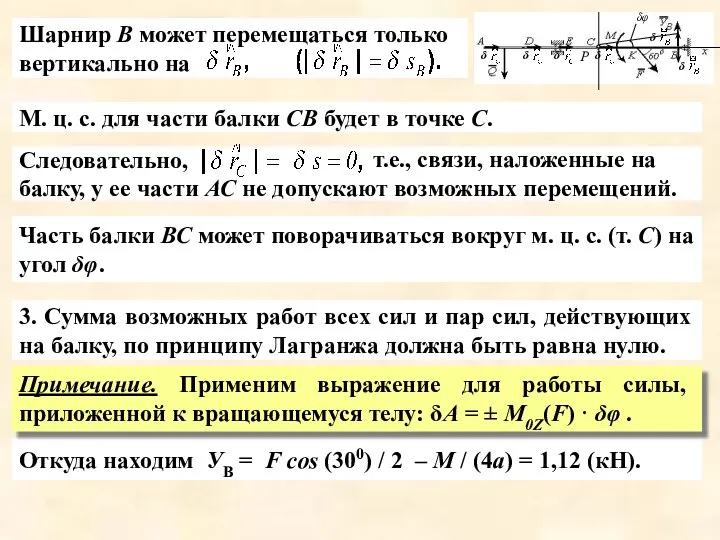
- 14. Следовательно, т.е., связи, наложенные на балку, у ее части АС не допускают возможных перемещений. Шарнир В
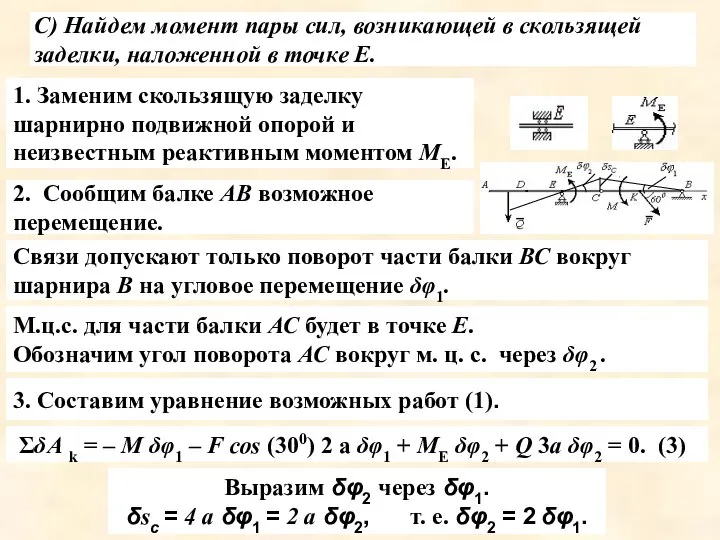
- 15. С) Найдем момент пары сил, возникающей в скользящей заделки, наложенной в точке Е. 1. Заменим скользящую
- 16. Двойная скользящая заделка – связь которая допускает любое поступательное перемещение в плоскости действия сил, но исключает
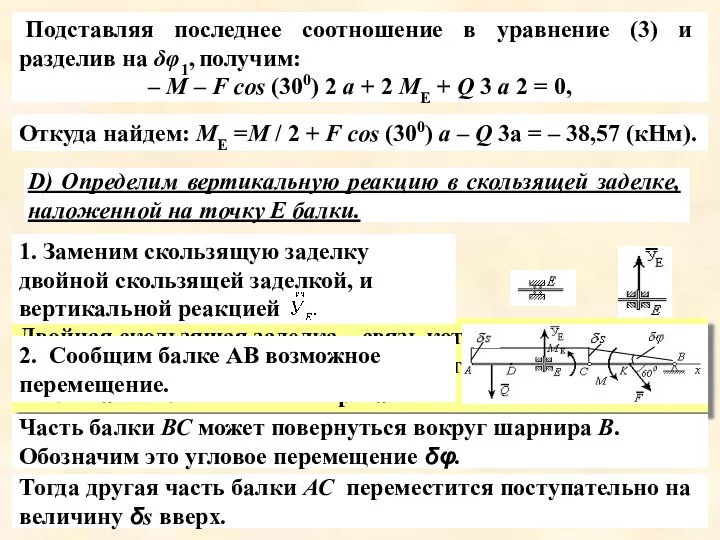
- 17. 3. Составим уравнение возможных работ (1). ΣδАk = – М δφ – F cos (300) 2а
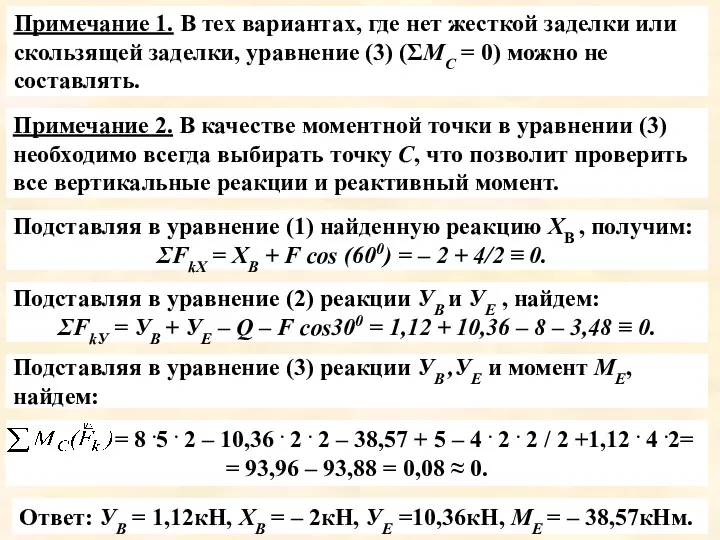
- 18. Примечание 2. В качестве моментной точки в уравнении (3) необходимо всегда выбирать точку С, что позволит
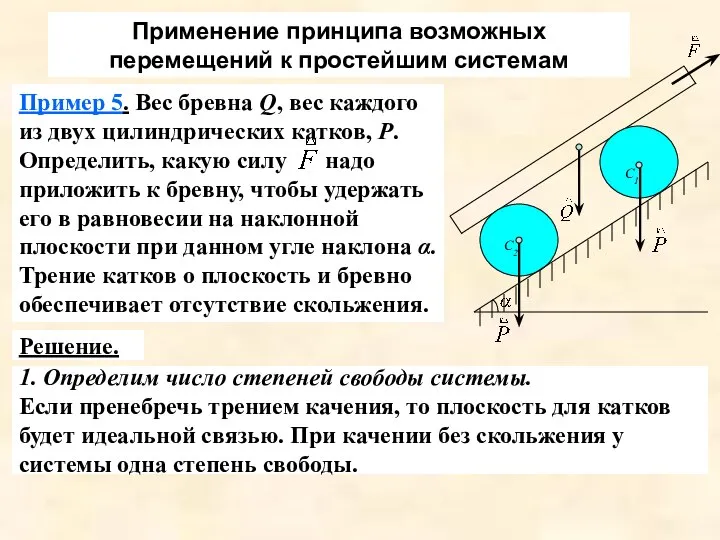
- 19. Пример 5. Вес бревна Q, вес каждого из двух цилиндрических катков, Р. Определить, какую силу надо
- 21. Скачать презентацию
Слайд 3Реономные (нестационарные) – зависящие от времени. Например, кинематическое возбуждение колебаний.
По освобождаемости:
Неосвобождающие (удерживающие
Реономные (нестационарные) – зависящие от времени. Например, кинематическое возбуждение колебаний.
По освобождаемости:
Неосвобождающие (удерживающие
Слайд 4Лекция 13 (продолжение – 13.2)
■ Возможные перемещения – бесконечно малые перемещения, допускаемые
Лекция 13 (продолжение – 13.2)
■ Возможные перемещения – бесконечно малые перемещения, допускаемые
Слайд 5■ Вычисление возможных перемещений:
Геометрический способ - в силу малости возможных перемещений при
■ Вычисление возможных перемещений:
Геометрический способ - в силу малости возможных перемещений при
Слайд 6Аналитический способ – вычисляется вариация от координат:
В отличие от геометрического способа
Аналитический способ – вычисляется вариация от координат:
В отличие от геометрического способа
Слайд 7Лекция 13 (продолжение – 13.3)
■ Идеальные связи – связи, при которых сумма
Лекция 13 (продолжение – 13.3)
■ Идеальные связи – связи, при которых сумма
Слайд 8Доказательство достаточности: Дано:
Предположим, что равновесия нет.
Тогда каждая из точек под действием
Доказательство достаточности: Дано:
Предположим, что равновесия нет.
Тогда каждая из точек под действием
Слайд 9■ Примеры использования принципа возможных перемещений для определения реакций связей:
Пример 1. Определить
■ Примеры использования принципа возможных перемещений для определения реакций связей:
Пример 1. Определить
Слайд 10Пример 2. Определить опорный момент многопролетной составной балке в левой опоре:
Отбросим в
Пример 2. Определить опорный момент многопролетной составной балке в левой опоре:
Отбросим в
Слайд 11Примечание. Скользящая заделка - это заделка, которая
«запрещает» поворот, но не ограничивает
Примечание. Скользящая заделка - это заделка, которая
«запрещает» поворот, но не ограничивает
Слайд 12Перемещения
направлены по соответствующим возможным скоростям
А) Определим горизонтальную реакцию в
Перемещения
направлены по соответствующим возможным скоростям
А) Определим горизонтальную реакцию в
Слайд 13Поделим уравнение (1) на δs ≠ 0 и получим
XВ +
Поделим уравнение (1) на δs ≠ 0 и получим
XВ +
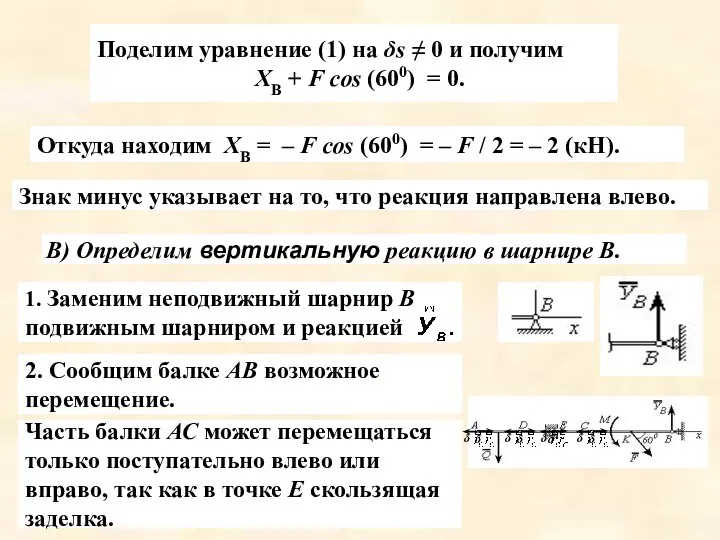
Слайд 14Следовательно,
т.е., связи, наложенные на балку, у ее части АС не допускают
Следовательно,
т.е., связи, наложенные на балку, у ее части АС не допускают
Слайд 15С) Найдем момент пары сил, возникающей в скользящей заделки, наложенной в точке
С) Найдем момент пары сил, возникающей в скользящей заделки, наложенной в точке
Слайд 16Двойная скользящая заделка – связь которая допускает любое поступательное перемещение в плоскости
Двойная скользящая заделка – связь которая допускает любое поступательное перемещение в плоскости
Слайд 173. Составим уравнение возможных работ (1).
ΣδАk = – М δφ – F
3. Составим уравнение возможных работ (1).
ΣδАk = – М δφ – F
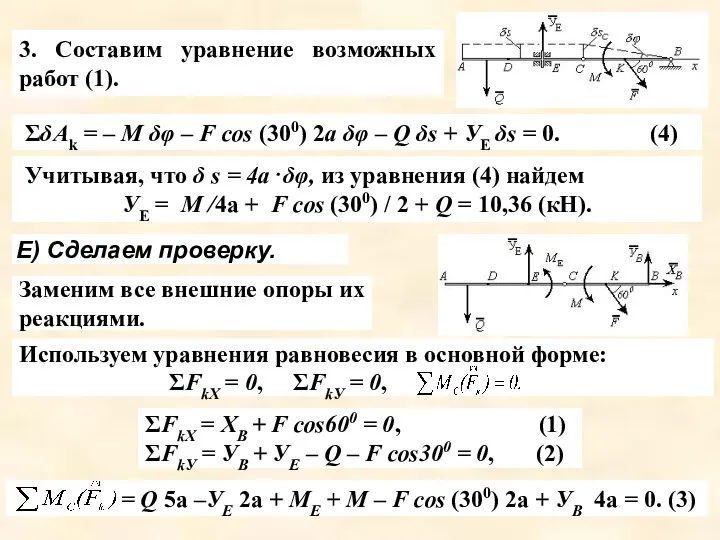
Слайд 18Примечание 2. В качестве моментной точки в уравнении (3) необходимо всегда выбирать
Примечание 2. В качестве моментной точки в уравнении (3) необходимо всегда выбирать
Слайд 19Пример 5. Вес бревна Q, вес каждого из двух цилиндрических катков, Р.
Пример 5. Вес бревна Q, вес каждого из двух цилиндрических катков, Р.
 Механика
Механика Презентация на тему Состав ядра. Ядерные силы (11 класс)
Презентация на тему Состав ядра. Ядерные силы (11 класс)  Трансмиссия автомобиля
Трансмиссия автомобиля Определение плотности твердого тела
Определение плотности твердого тела Динамика материальной точки
Динамика материальной точки Сравнительная характеристика движения частиц
Сравнительная характеристика движения частиц 1 нче сорау Фотоэффект вакытында нәрсә күзәтелә? А. Атомнарн
1 нче сорау Фотоэффект вакытында нәрсә күзәтелә? А. Атомнарн Работа газа и пара при расширении. Двигатель внутреннего сгорания
Работа газа и пара при расширении. Двигатель внутреннего сгорания Законы сохранения в механике
Законы сохранения в механике Деформированное состояние в точке. Обобщенный закон Гука. Лекция 10
Деформированное состояние в точке. Обобщенный закон Гука. Лекция 10 Измерения абсолютного значения мощности СВЧ излучения в экспериментах по напылению веществ на пластины кварца и молибдена
Измерения абсолютного значения мощности СВЧ излучения в экспериментах по напылению веществ на пластины кварца и молибдена Основные понятия и аксиомы динамики. Понятие о трении
Основные понятия и аксиомы динамики. Понятие о трении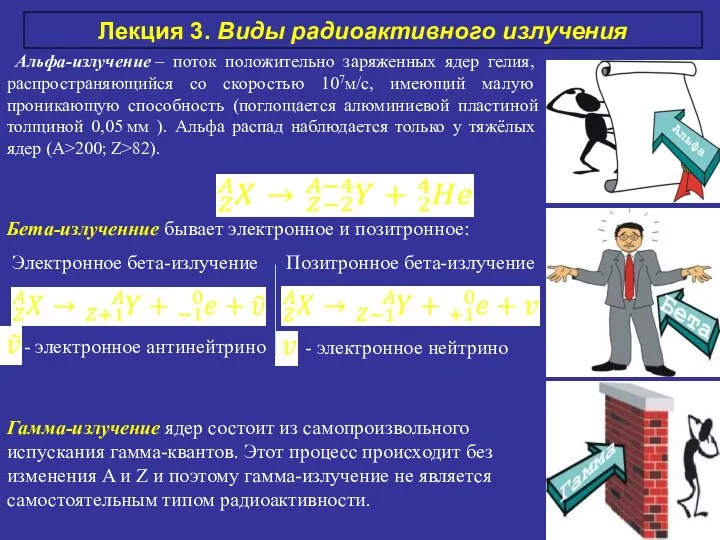 Виды радиоактивного излучения. (Лекция 3)
Виды радиоактивного излучения. (Лекция 3) Электрический двигатель
Электрический двигатель Что изучает физика
Что изучает физика Двухмасовый маховик
Двухмасовый маховик Влияние наушников на слух человека
Влияние наушников на слух человека Решение задач. Силы тяжести, упругости
Решение задач. Силы тяжести, упругости Кольца Гельмгольца
Кольца Гельмгольца Реактивное движение
Реактивное движение Газовые законы
Газовые законы Кванттық физика
Кванттық физика Законы Ньютона
Законы Ньютона Атом - сложная частица
Атом - сложная частица Техническая механика. Раздел: Теоретическая механика. Лекция 1
Техническая механика. Раздел: Теоретическая механика. Лекция 1 Принципы и методы количественного анализа вещества
Принципы и методы количественного анализа вещества Способы изготовление байдарки
Способы изготовление байдарки План структурной оптимизации технологического процесса изготовления кузова модели SX11
План структурной оптимизации технологического процесса изготовления кузова модели SX11