- Коррекция систем

Содержание
- 2. Коррекция систем Реальная система электропривода строится следующим образом: исходя из наличия , предприятие выбирает напряжение .
- 3. “Желаемый” вид ЛЧХ САУ в разомкнутом состоянии Важным требованием к системе автоматического управления в динамике являются
- 4. Основным назначением САУ является автоматическое поддержание или изменение по заданному закону регулируемой величины. Отсюда основными требованиями
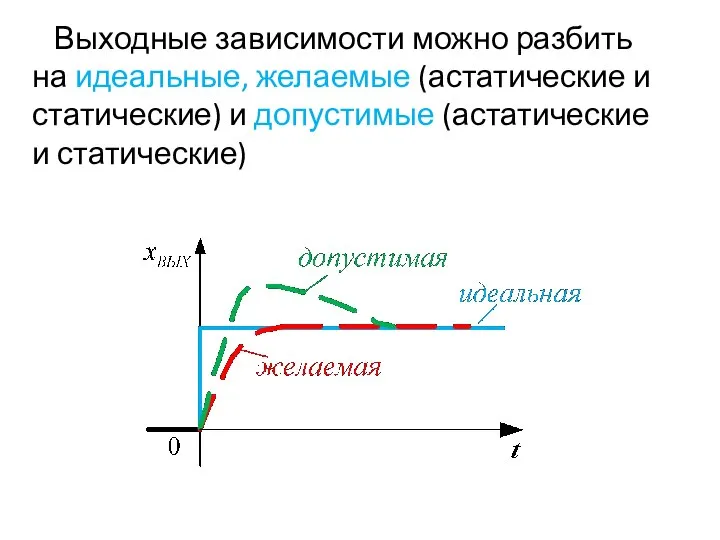
- 5. Выходные зависимости можно разбить на идеальные, желаемые (астатические и статические) и допустимые (астатические и статические)
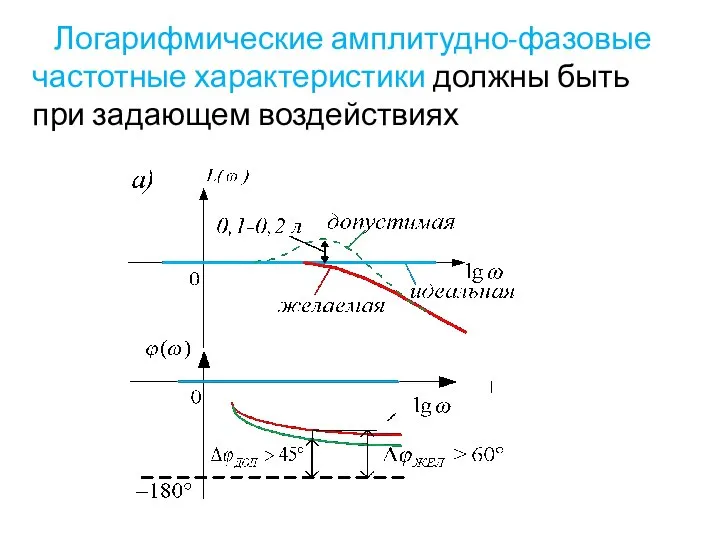
- 6. Логарифмические амплитудно-фазовые частотные характеристики должны быть при задающем воздействиях
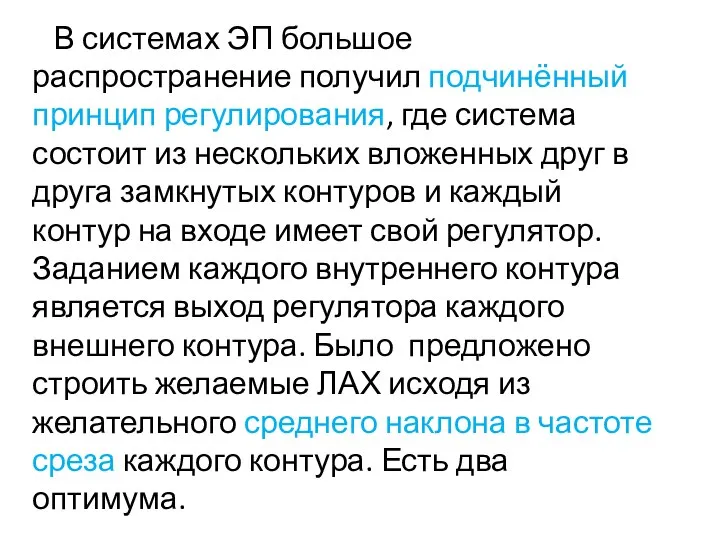
- 7. В системах ЭП большое распространение получил подчинённый принцип регулирования, где система состоит из нескольких вложенных друг
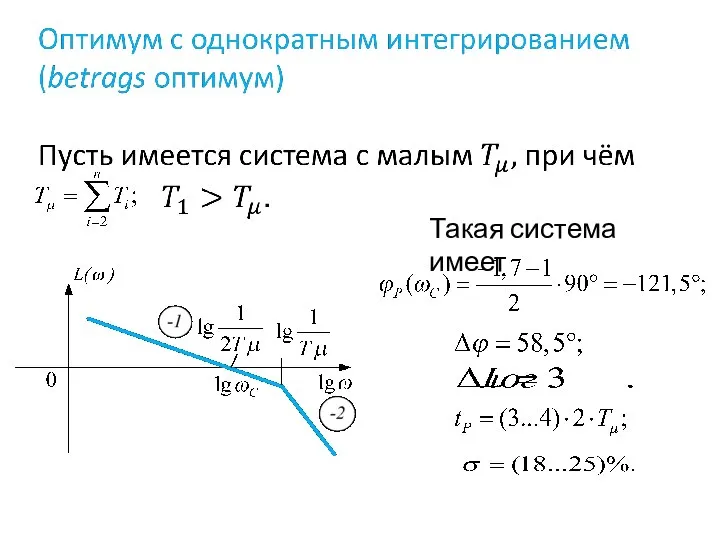
- 8. Такая система имеет
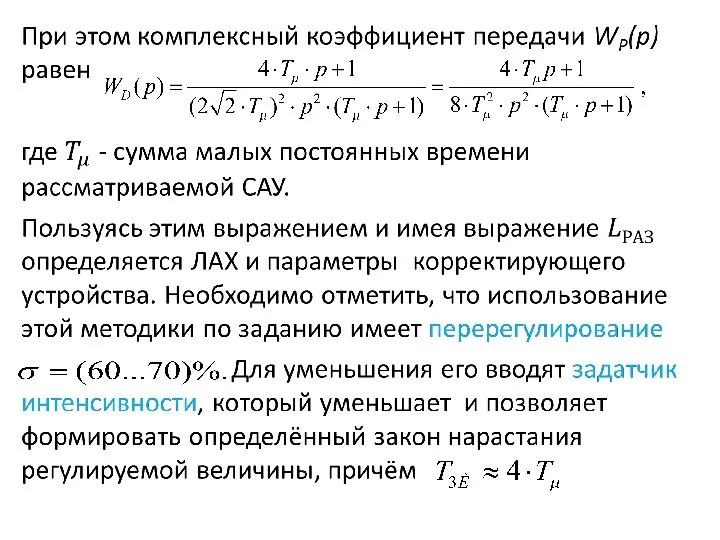
- 9. Комплексный коэффициент передачи равен
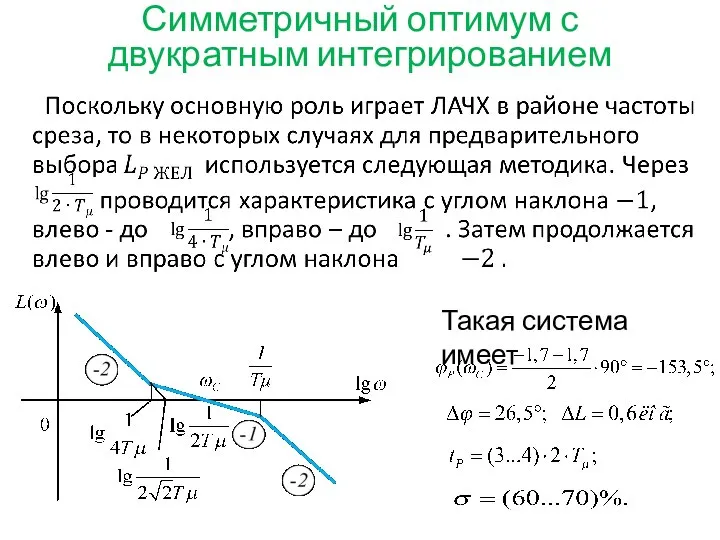
- 10. Симметричный оптимум с двукратным интегрированием Такая система имеет
- 12. ЛАЧХ системы в замкнутом состоянии а) , включение задатчика интенсивности б)
- 13. Синтез корректирующих устройств Синтезом САУ в широком смысле слова называют нахождение структуры и параметров системы (или
- 14. При решении этой задачи возможны два пути. 1. Изменение основной (исходной) структуры построения схемы. 2. Введение
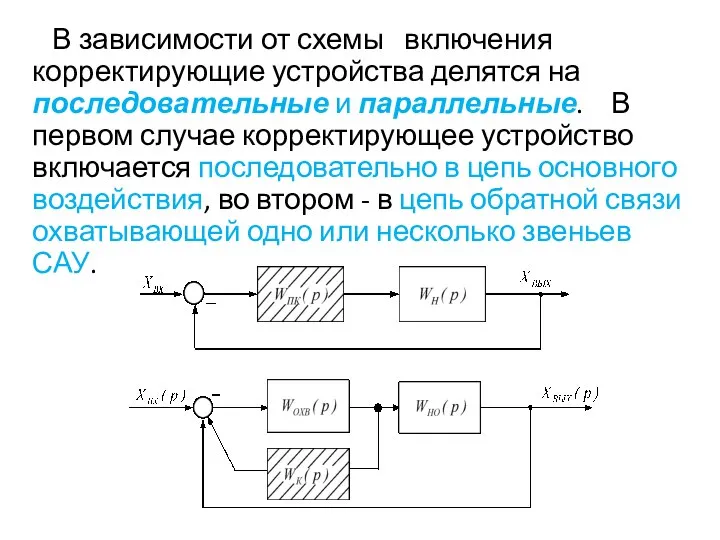
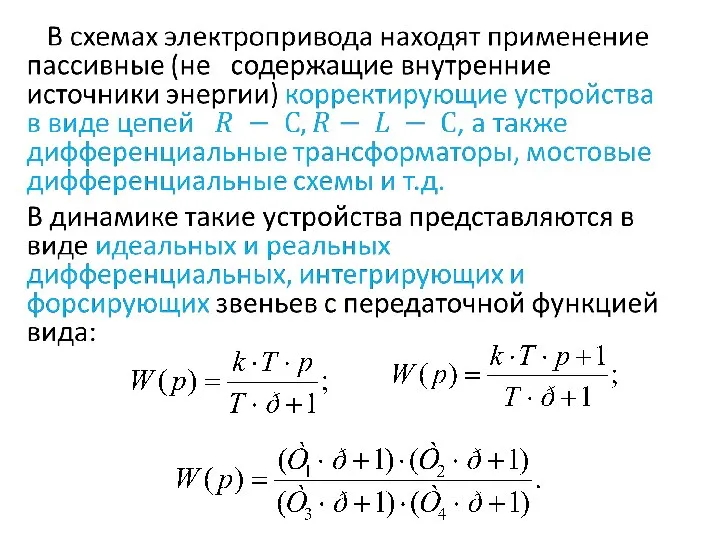
- 15. В зависимости от схемы включения корректирующие устройства делятся на последовательные и параллельные. В первом случае корректирующее
- 17. Последовательная коррекция
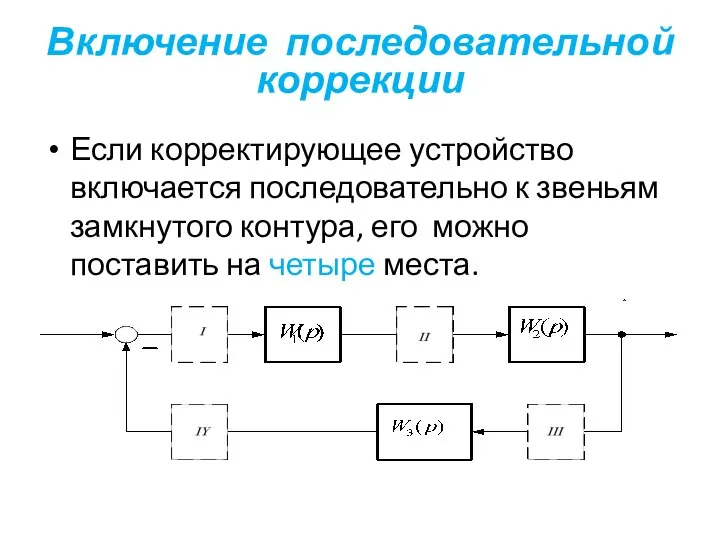
- 18. Включение последовательной коррекции Если корректирующее устройство включается последовательно к звеньям замкнутого контура, его можно поставить на
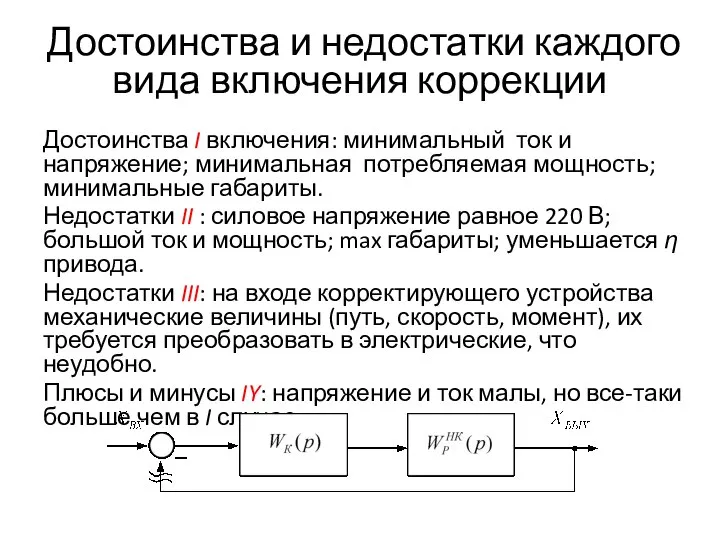
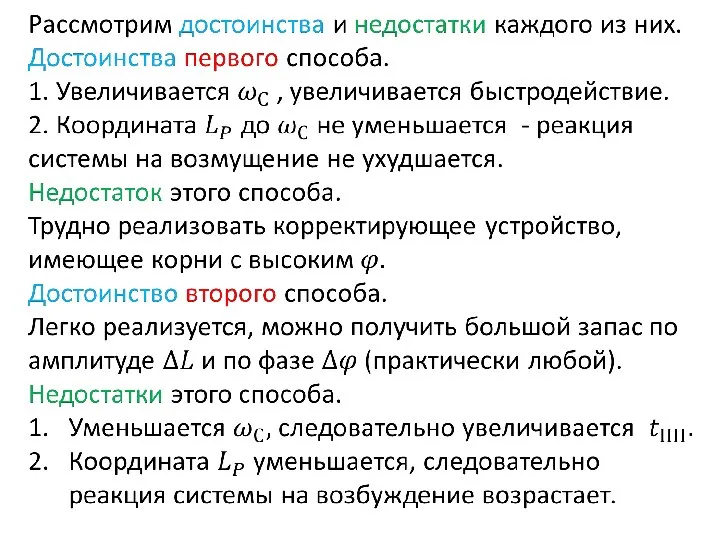
- 19. Достоинства и недостатки каждого вида включения коррекции Достоинства I включения: минимальный ток и напряжение; минимальная потребляемая
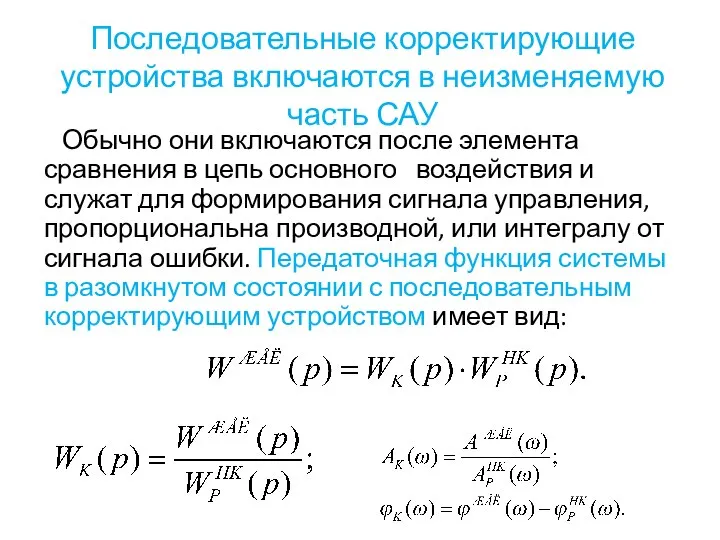
- 20. Последовательные корректирующие устройства включаются в неизменяемую часть САУ Обычно они включаются после элемента сравнения в цепь
- 21. Переходя к логарифмическому масштабу, получим. Если задаться желаемым видом ЛЧХ системы в разомкнутом состоянии, то из
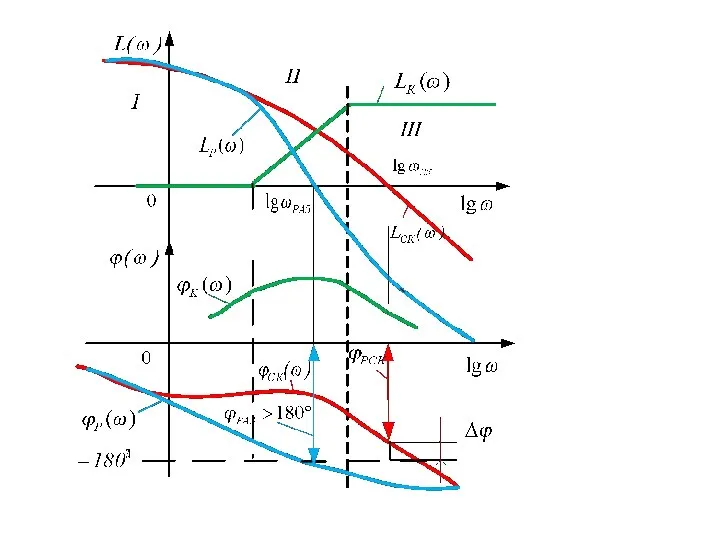
- 22. Существенными являются вид ЛАЧХ в районе частоты среза . Выбор наклонов ЛАЧХ в высокочастотной и низкочастотной
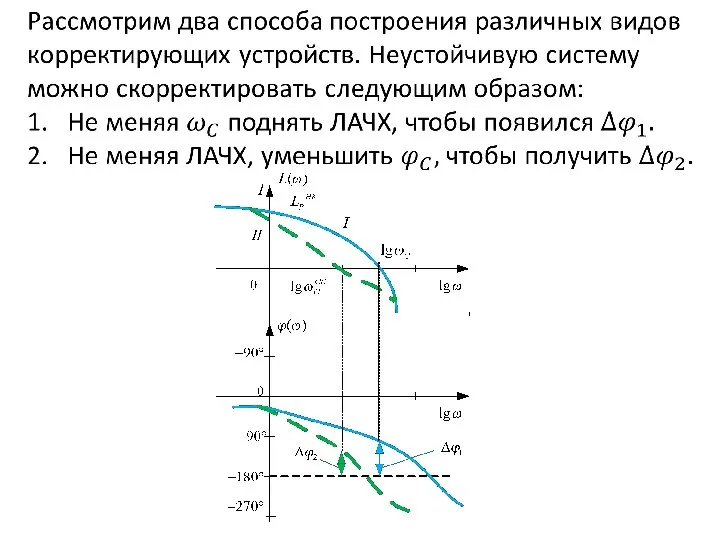
- 25. Виды последовательного корректирования
- 29. Недостатки опережающей коррекции. 1) Чувствительность опережающей коррекции к радиопомехам (к помехам высокой частоты). 2) Небольшие возможности
- 30. Запаздывающая коррекция Обладают такие корректирующие устройства, у которых синусоидальный сигнал на выходе отстаёт от синусоидального сигнала
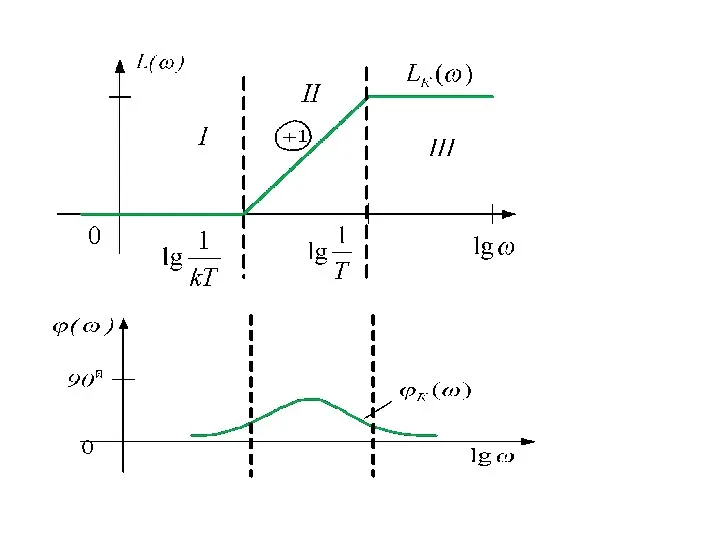
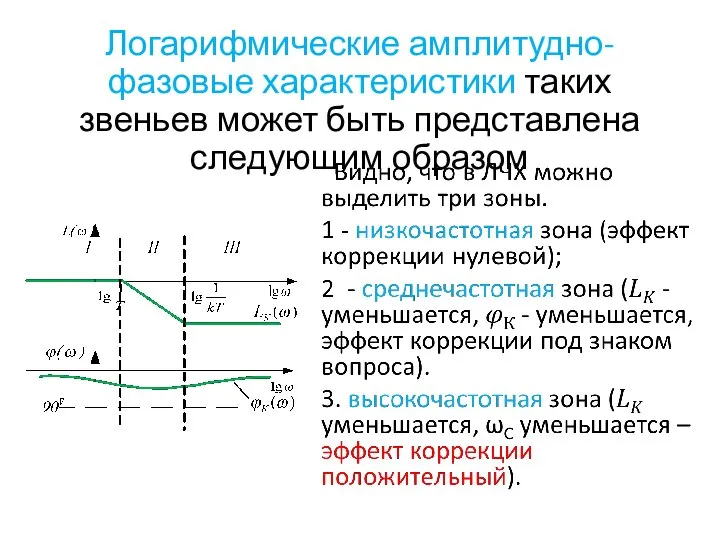
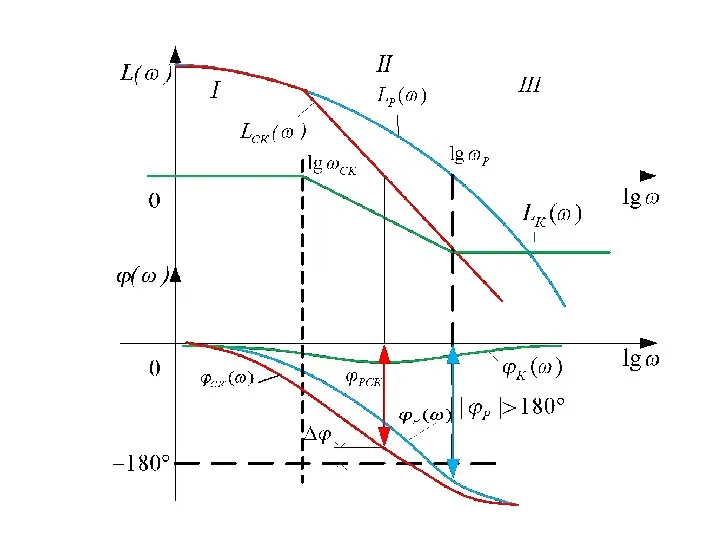
- 31. Логарифмические амплитудно-фазовые характеристики таких звеньев может быть представлена следующим образом
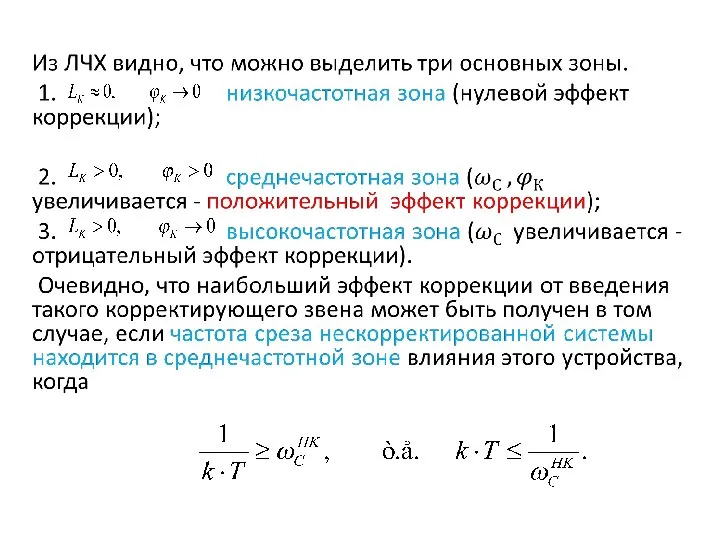
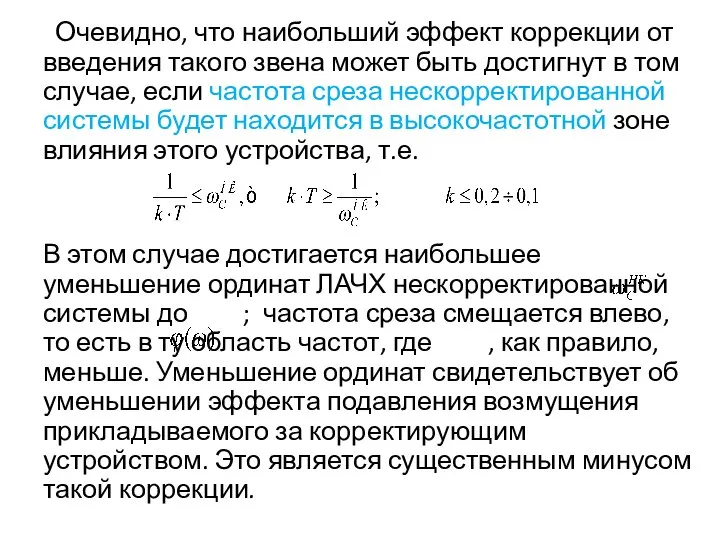
- 32. Очевидно, что наибольший эффект коррекции от введения такого звена может быть достигнут в том случае, если
- 35. Комбинированная коррекция Это такие корректирующие устройства, у которых на некотором участке частоты синусоидальный сигнал на выходе
- 36. Логарифмическая амплитудно-фазовая характеристика имеет пять зон. 1. - низкочастотная зона (эффект коррекции нулевой); 2. - среднечастотная
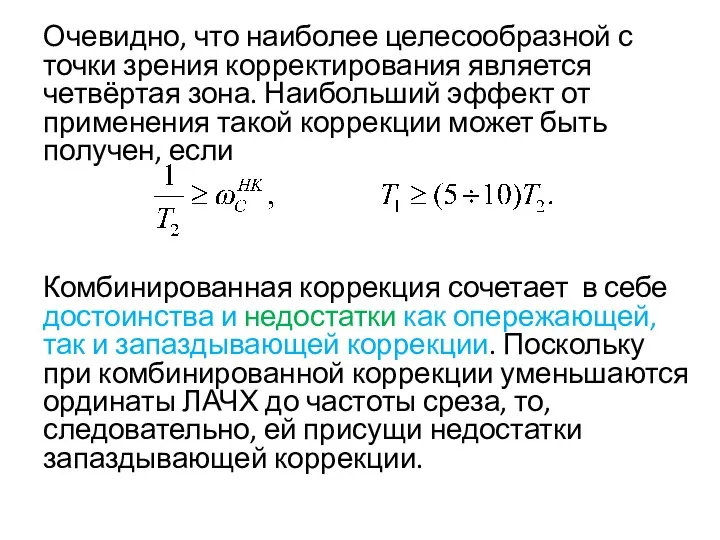
- 37. Очевидно, что наиболее целесообразной с точки зрения корректирования является четвёртая зона. Наибольший эффект от применения такой
- 39. Скачать презентацию
Слайд 2Коррекция систем
Реальная система электропривода строится следующим образом: исходя из наличия , предприятие
Коррекция систем
Реальная система электропривода строится следующим образом: исходя из наличия , предприятие
Слайд 3“Желаемый” вид ЛЧХ САУ в разомкнутом состоянии
Важным требованием к системе автоматического
“Желаемый” вид ЛЧХ САУ в разомкнутом состоянии
Важным требованием к системе автоматического
Слайд 4Основным назначением САУ является автоматическое поддержание или изменение по заданному закону регулируемой
Основным назначением САУ является автоматическое поддержание или изменение по заданному закону регулируемой
Слайд 5 Выходные зависимости можно разбить на идеальные, желаемые (астатические и статические) и
Выходные зависимости можно разбить на идеальные, желаемые (астатические и статические) и
Слайд 6 Логарифмические амплитудно-фазовые частотные характеристики должны быть при задающем воздействиях
Логарифмические амплитудно-фазовые частотные характеристики должны быть при задающем воздействиях
Слайд 7 В системах ЭП большое распространение получил подчинённый принцип регулирования, где система
В системах ЭП большое распространение получил подчинённый принцип регулирования, где система
Слайд 8
Такая система имеет
Такая система имеет
Слайд 9Комплексный коэффициент передачи равен
Комплексный коэффициент передачи равен

Слайд 10Симметричный оптимум с двукратным интегрированием
Такая система имеет
Симметричный оптимум с двукратным интегрированием
Такая система имеет
Слайд 12ЛАЧХ системы в замкнутом состоянии а) , включение задатчика интенсивности б)
ЛАЧХ системы в замкнутом состоянии а) , включение задатчика интенсивности б)

Слайд 13Синтез корректирующих устройств
Синтезом САУ в широком смысле слова называют нахождение структуры и
Синтез корректирующих устройств
Синтезом САУ в широком смысле слова называют нахождение структуры и
Слайд 14 При решении этой задачи возможны два пути.
1. Изменение основной (исходной) структуры
При решении этой задачи возможны два пути.
1. Изменение основной (исходной) структуры
Слайд 15 В зависимости от схемы включения корректирующие устройства делятся на последовательные и
В зависимости от схемы включения корректирующие устройства делятся на последовательные и
Слайд 17Последовательная коррекция
Последовательная коррекция
Слайд 18Включение последовательной коррекции
Если корректирующее устройство включается последовательно к звеньям замкнутого контура, его
Включение последовательной коррекции
Если корректирующее устройство включается последовательно к звеньям замкнутого контура, его
Слайд 19Достоинства и недостатки каждого вида включения коррекции
Достоинства I включения: минимальный ток и
Достоинства и недостатки каждого вида включения коррекции
Достоинства I включения: минимальный ток и
Слайд 20Последовательные корректирующие устройства включаются в неизменяемую часть САУ
Обычно они включаются после
Последовательные корректирующие устройства включаются в неизменяемую часть САУ
Обычно они включаются после
Слайд 21Переходя к логарифмическому масштабу, получим.
Если задаться желаемым видом ЛЧХ системы в разомкнутом
Переходя к логарифмическому масштабу, получим.
Если задаться желаемым видом ЛЧХ системы в разомкнутом
Слайд 22 Существенными являются вид ЛАЧХ в районе частоты среза . Выбор наклонов
Существенными являются вид ЛАЧХ в районе частоты среза . Выбор наклонов
Слайд 25Виды последовательного корректирования
Виды последовательного корректирования
Слайд 29Недостатки опережающей коррекции.
1) Чувствительность опережающей коррекции к радиопомехам (к помехам высокой частоты).
2)
Недостатки опережающей коррекции.
1) Чувствительность опережающей коррекции к радиопомехам (к помехам высокой частоты).
2)
Слайд 30Запаздывающая коррекция
Обладают такие корректирующие устройства, у которых синусоидальный сигнал на выходе
Запаздывающая коррекция
Обладают такие корректирующие устройства, у которых синусоидальный сигнал на выходе
Слайд 31Логарифмические амплитудно-фазовые характеристики таких звеньев может быть представлена следующим образом
Логарифмические амплитудно-фазовые характеристики таких звеньев может быть представлена следующим образом
Слайд 32 Очевидно, что наибольший эффект коррекции от введения такого звена может быть
Очевидно, что наибольший эффект коррекции от введения такого звена может быть
Слайд 35Комбинированная коррекция
Это такие корректирующие устройства, у которых на некотором участке частоты
Комбинированная коррекция
Это такие корректирующие устройства, у которых на некотором участке частоты
Слайд 36Логарифмическая амплитудно-фазовая характеристика имеет пять зон.
1. - низкочастотная зона (эффект коррекции нулевой);
2.
Логарифмическая амплитудно-фазовая характеристика имеет пять зон.
1. - низкочастотная зона (эффект коррекции нулевой);
2.
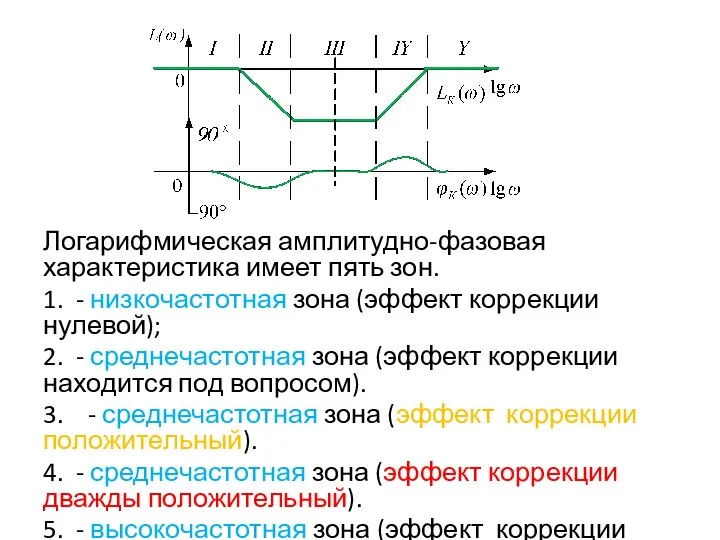
Слайд 37Очевидно, что наиболее целесообразной с точки зрения корректирования является четвёртая зона. Наибольший
Очевидно, что наиболее целесообразной с точки зрения корректирования является четвёртая зона. Наибольший
 Квантовая механика
Квантовая механика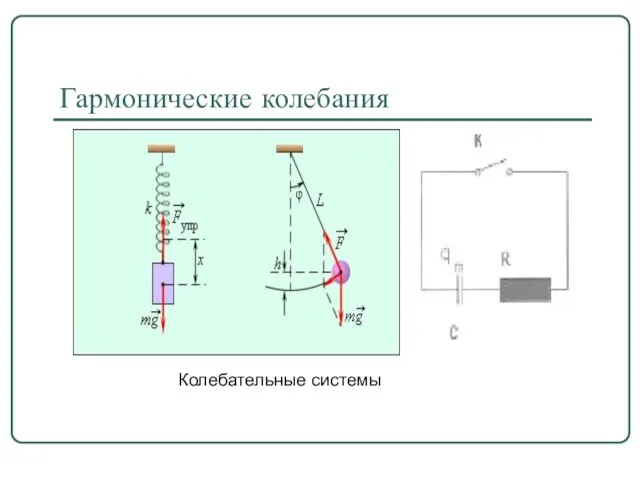 Гармонические колебания. Колебательные системы
Гармонические колебания. Колебательные системы МотоСкороХоды
МотоСкороХоды Изотопы
Изотопы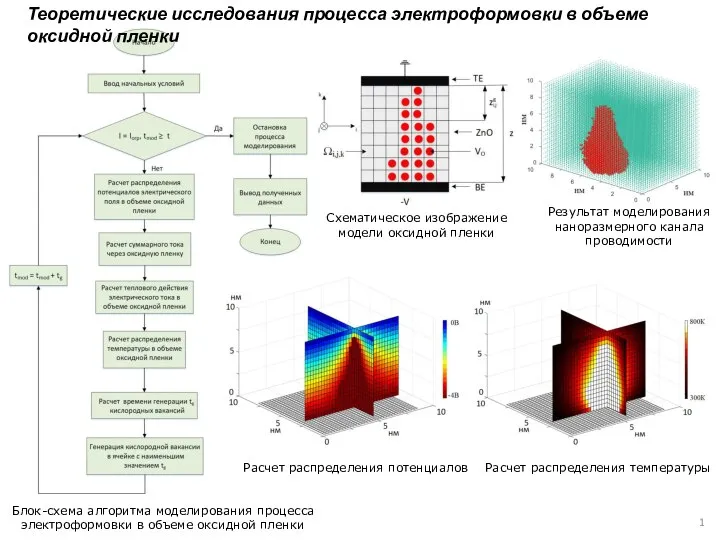 Модель исследования процесса электроформовки в объеме оксидной пленки
Модель исследования процесса электроформовки в объеме оксидной пленки Принцип Гюйгенса в виде формулы Кирхгофа
Принцип Гюйгенса в виде формулы Кирхгофа Гидродинамика. Движение жидкости
Гидродинамика. Движение жидкости Анализ ЭМВ Н- И Е--типов в круглом волноводе
Анализ ЭМВ Н- И Е--типов в круглом волноводе Законы сохранения
Законы сохранения Электричество и магнетизм (лекция 11)
Электричество и магнетизм (лекция 11) ВСР №20. Голография и ее применение
ВСР №20. Голография и ее применение Презентация на тему Применение кристаллов
Презентация на тему Применение кристаллов  Условие равновесия рычага
Условие равновесия рычага Какие бывают машины
Какие бывают машины Электромагнитная индукция. Опыты Фарадея
Электромагнитная индукция. Опыты Фарадея Электромагнитные излучения
Электромагнитные излучения Электрический генератор
Электрический генератор Напряженность электрического поля в пространстве. Закрепление пройденного материала
Напряженность электрического поля в пространстве. Закрепление пройденного материала Вспомогательные системы дизеля (занятие 3)
Вспомогательные системы дизеля (занятие 3) Нелинейно-оптические методы измерений в фемтосекундной оптике
Нелинейно-оптические методы измерений в фемтосекундной оптике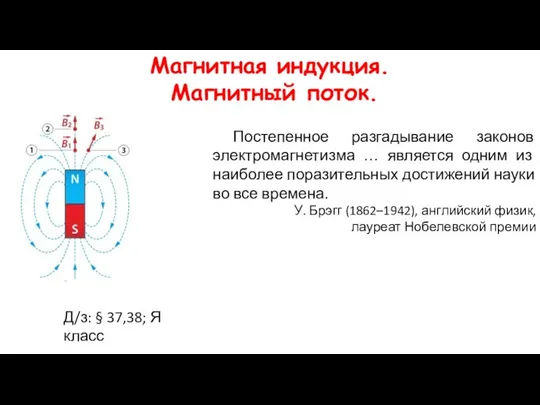 Магнитная индукция. Магнитный поток
Магнитная индукция. Магнитный поток Изменение агрегатных состояний вещества. Решение задач
Изменение агрегатных состояний вещества. Решение задач Космические ЯЭУ
Космические ЯЭУ Последовательное соединение
Последовательное соединение Сила. Явление всемирного тяготения. Сила тяжести
Сила. Явление всемирного тяготения. Сила тяжести Сухой электростатический перенос
Сухой электростатический перенос Законы сохранения в механике
Законы сохранения в механике Ядерные реакции
Ядерные реакции