- Kinematika_tverdogo_tela_33__33__33

Содержание
- 2. Кинематика твердого тела Задать движение твердого тела – значит, указать способ определения положения каждой точки в
- 3. Виды движения твердого тела Поступательное движение Вращательное движение Плоско-параллельное движение Сферическое движение Общий случай движения твердого
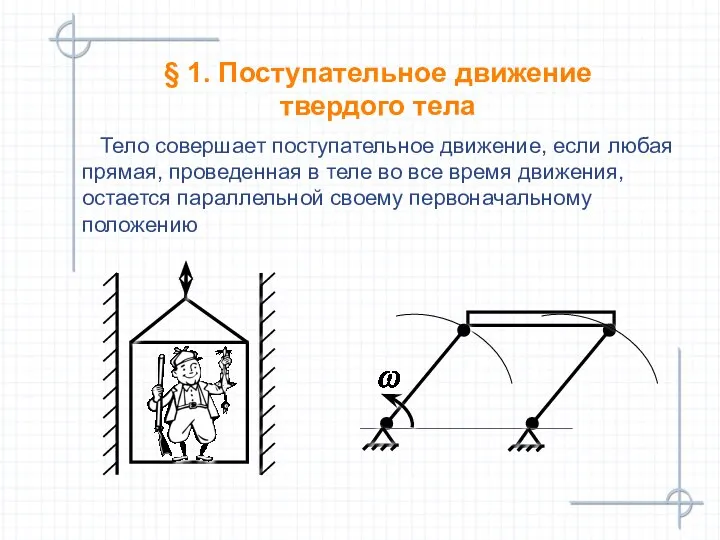
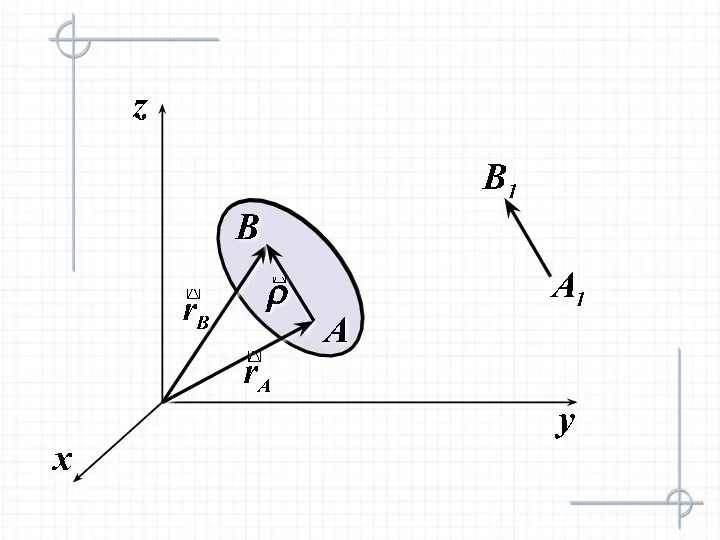
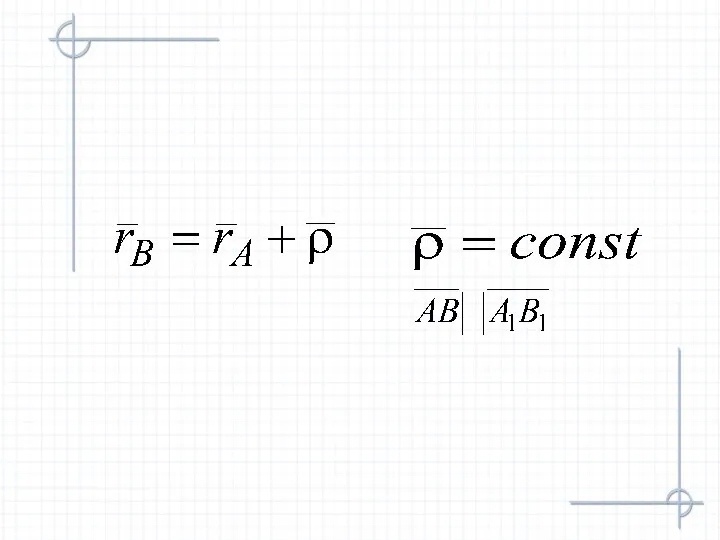
- 4. § 1. Поступательное движение твердого тела Тело совершает поступательное движение, если любая прямая, проведенная в теле
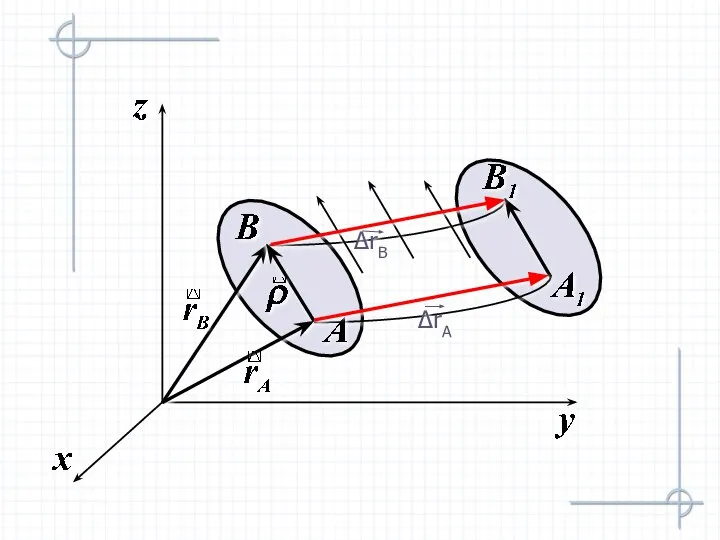
- 5. Теорема, определяющая свойства поступательного движения При поступательном движении твердого тела все его точки описывают одинаковые траектории
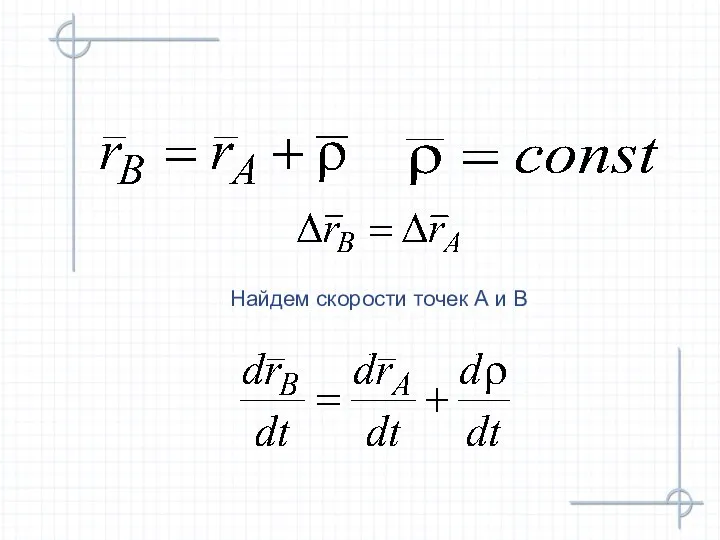
- 9. Найдем скорости точек А и В
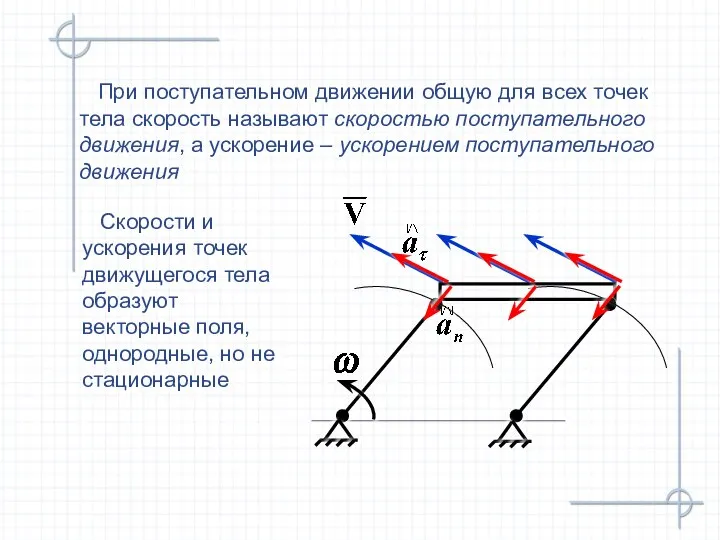
- 12. При поступательном движении общую для всех точек тела скорость называют скоростью поступательного движения, а ускорение –
- 13. § 2. Вращательное движение твердого тела вокруг неподвижной оси Движение твердого тела с двумя неподвижными точками
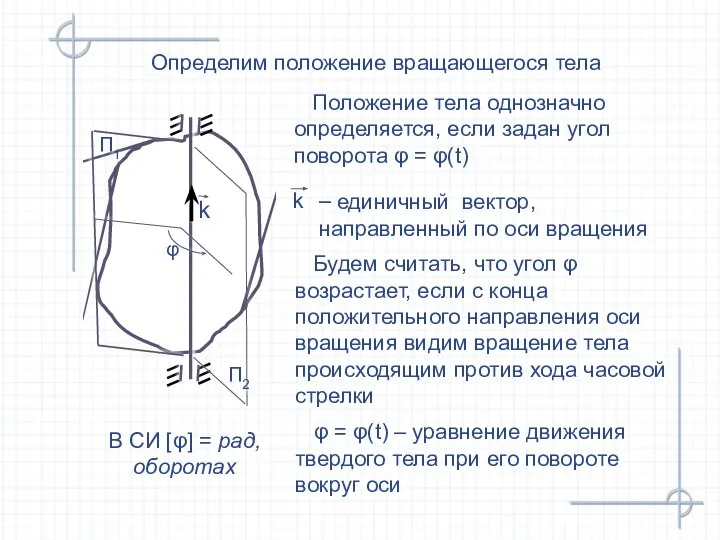
- 14. Положение тела однозначно определяется, если задан угол поворота φ = φ(t) Определим положение вращающегося тела П2
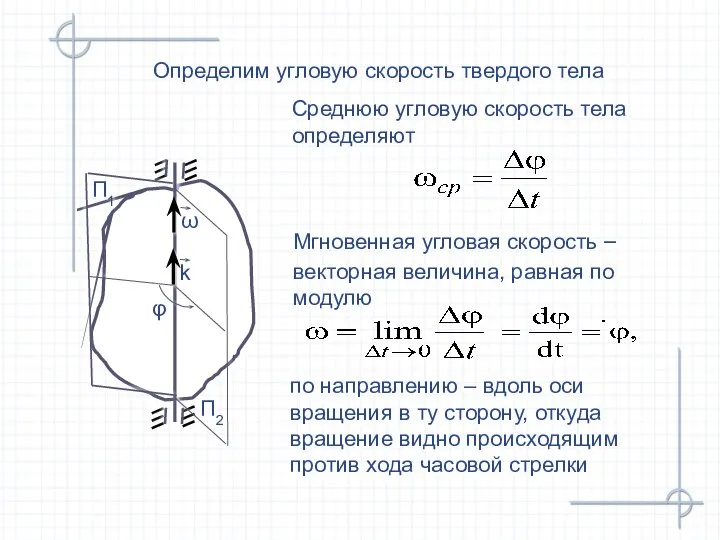
- 15. Среднюю угловую скорость тела определяют Определим угловую скорость твердого тела П2 П1 Мгновенная угловая скорость –
- 16. В технике при равномерном вращении пользуются n – числом оборотов в минуту В системе СИ [ω]
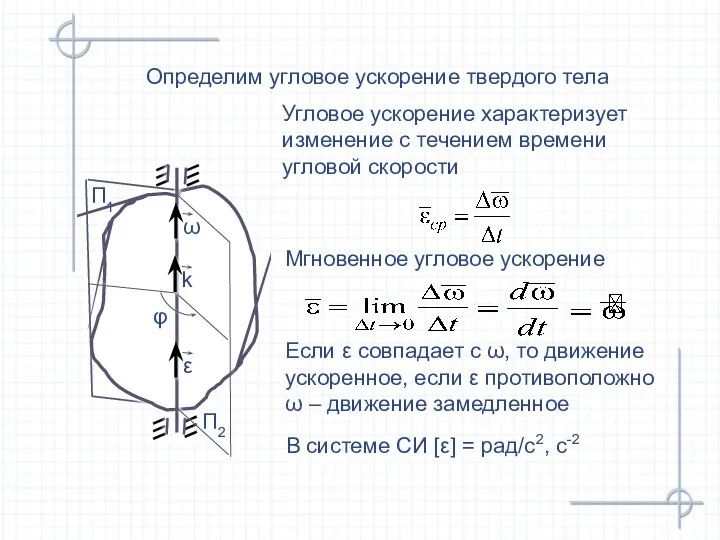
- 17. Угловое ускорение характеризует изменение с течением времени угловой скорости Определим угловое ускорение твердого тела П2 П1
- 18. Равномерное вращение Если то вращение называется равномерным Закон равномерного вращения твердого тела С – константа интегрирования
- 19. Равнопеременное вращение Если ω и ε имеют одинаковые знаки, то вращение равноускоренное, если разные – равнозамедленное
- 20. За dt точка М совершает вдоль траектории элементарное перемещение ds Скорости точек вращающегося твердого тела П2
- 21. Поле скоростей точек вращающегося тела
- 22. Вспомним, что Ускорения точек вращающегося твердого тела μ Здесь Полное ускорение и и C μ –
- 23. Поле ускорений точек вращающегося тела Формулы (1)–(5) позволяют определить скорость и ускорение любой точки вращающегося тела,
- 24. Леонард Эйлер (1707 –1783) показал, что скорость вращающейся точки тела можно определить из векторного произведения угловой
- 25. Векторы скорости и ускорения точек вращающегося твердого тела П1 С Возьмем производные от обеих частей уравнения
- 26. § 3. Плоско-параллельное движение твердого тела Плоско-параллельным (или плоским) движением (ППД) твердого тела называется такое, при
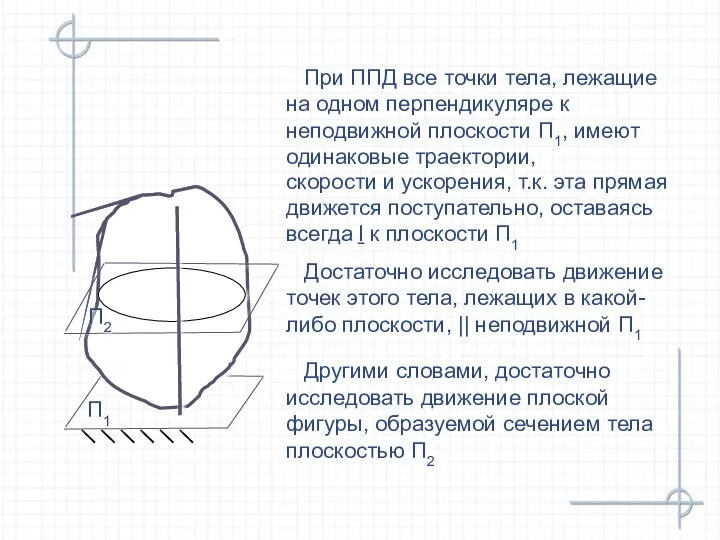
- 27. скорости и ускорения, т.к. эта прямая движется поступательно, оставаясь всегда ḻ к плоскости П1 При ППД
- 28. Положение фигуры в плоскости П2 по отношению к неподвижной системе координат ОХУ определяется положением какого-либо отрезка
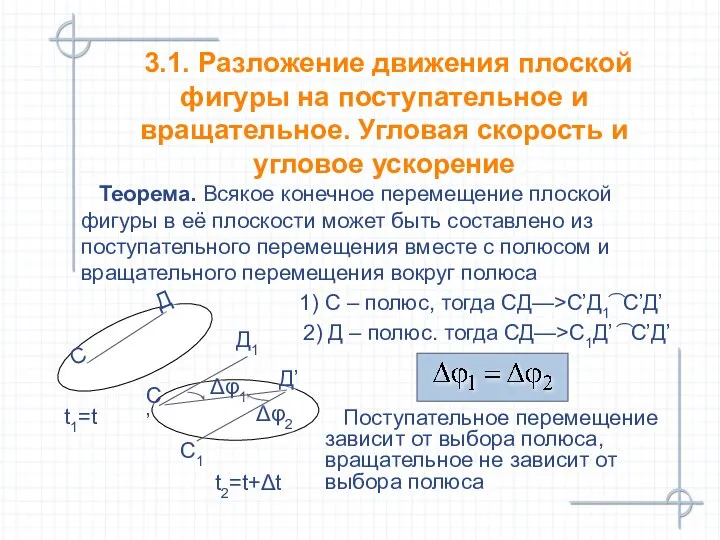
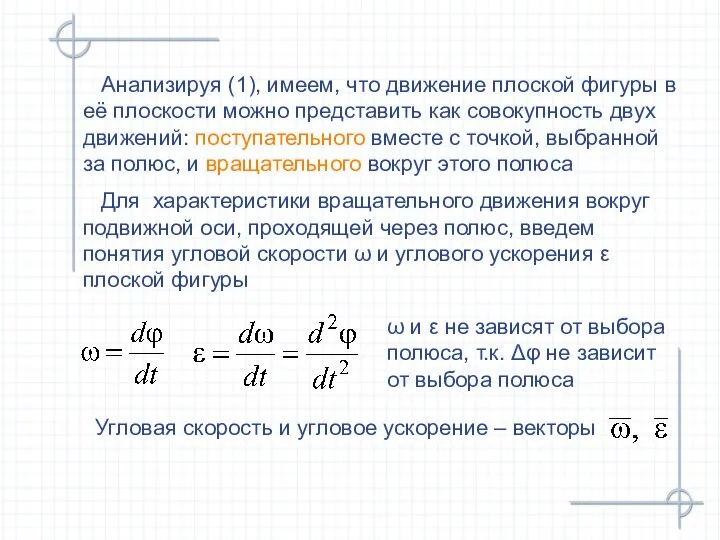
- 29. Теорема. Всякое конечное перемещение плоской фигуры в её плоскости может быть составлено из поступательного перемещения вместе
- 30. Для характеристики вращательного движения вокруг подвижной оси, проходящей через полюс, введем понятия угловой скорости ω и
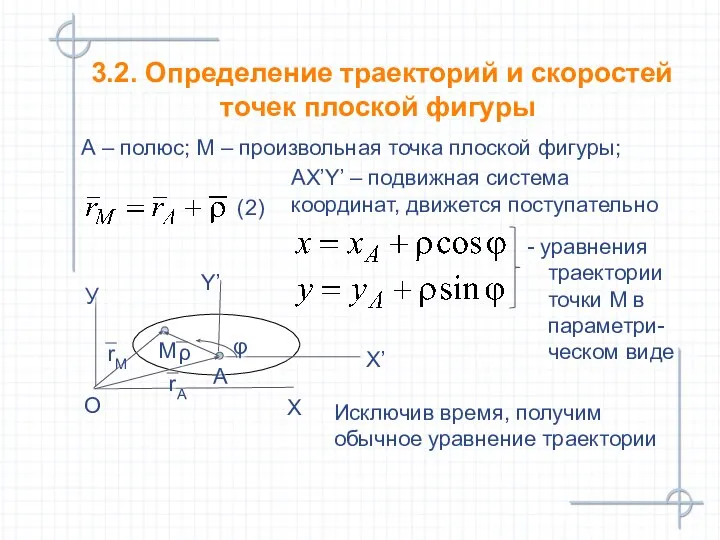
- 31. А – полюс; М – произвольная точка плоской фигуры; 3.2. Определение траекторий и скоростей точек плоской
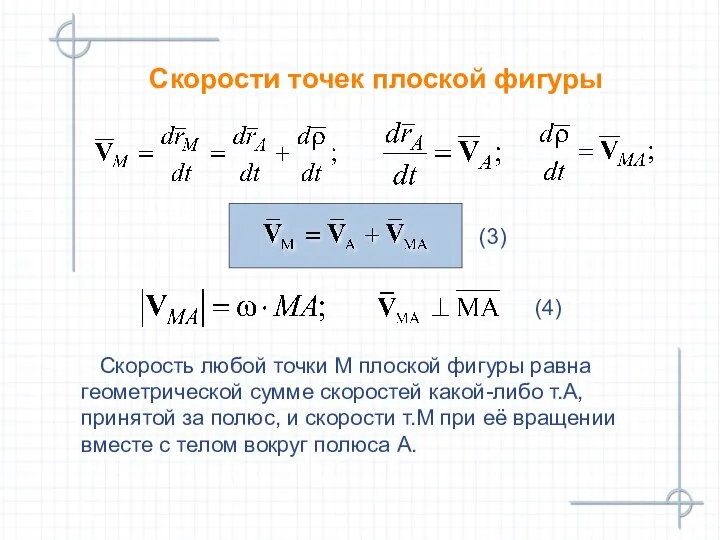
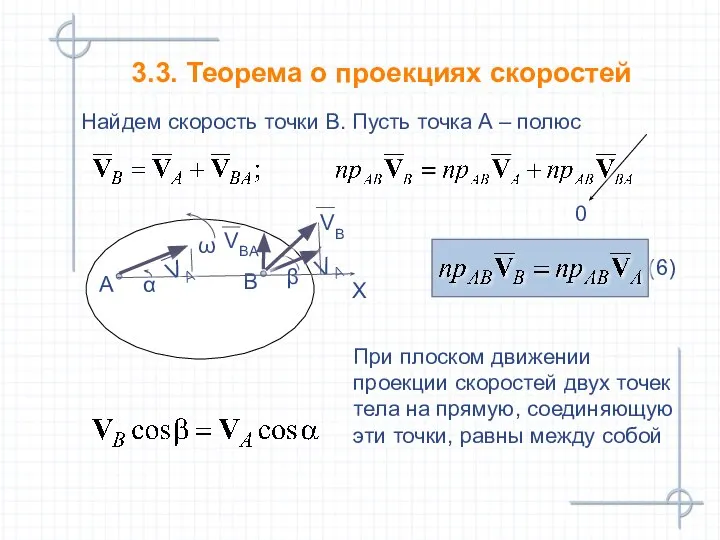
- 32. Скорости точек плоской фигуры (4) Скорость любой точки М плоской фигуры равна геометрической сумме скоростей какой-либо
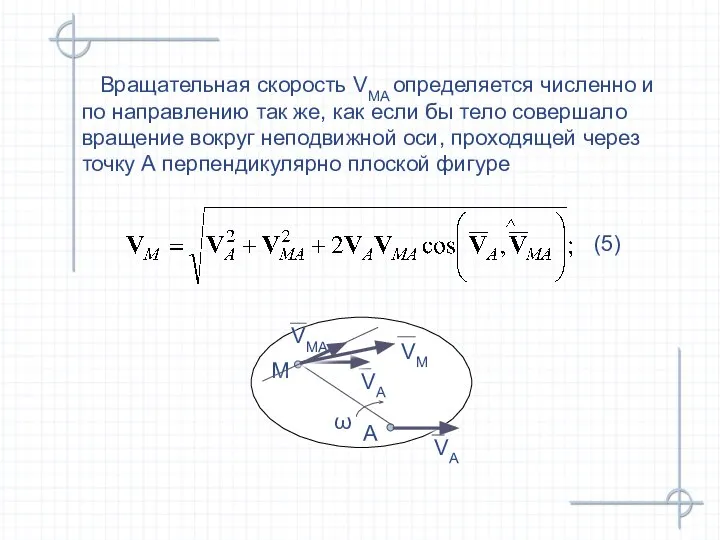
- 33. (5) Вращательная скорость VMA определяется численно и по направлению так же, как если бы тело совершало
- 34. (6) 3.3. Теорема о проекциях скоростей Найдем скорость точки В. Пусть точка А – полюс При
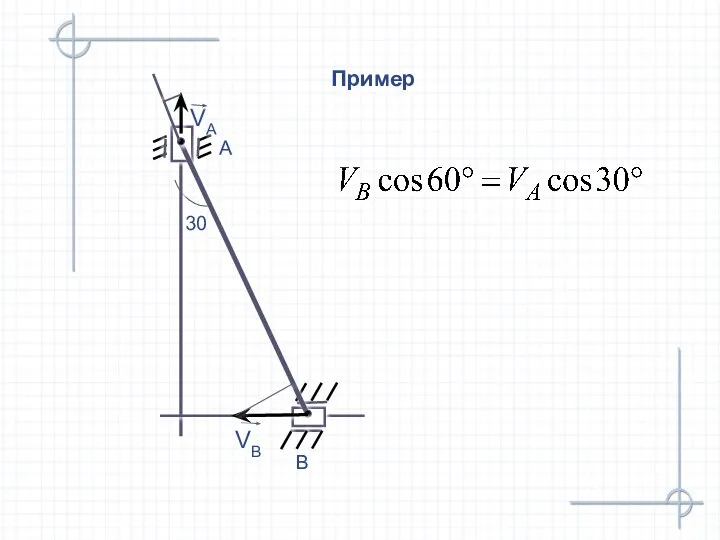
- 35. Пример B A
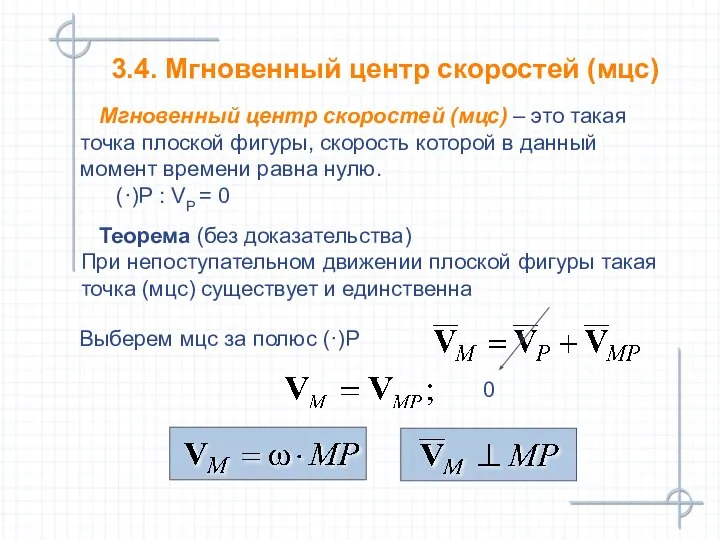
- 36. 3.4. Мгновенный центр скоростей (мцс) Мгновенный центр скоростей (мцс) – это такая точка плоской фигуры, скорость
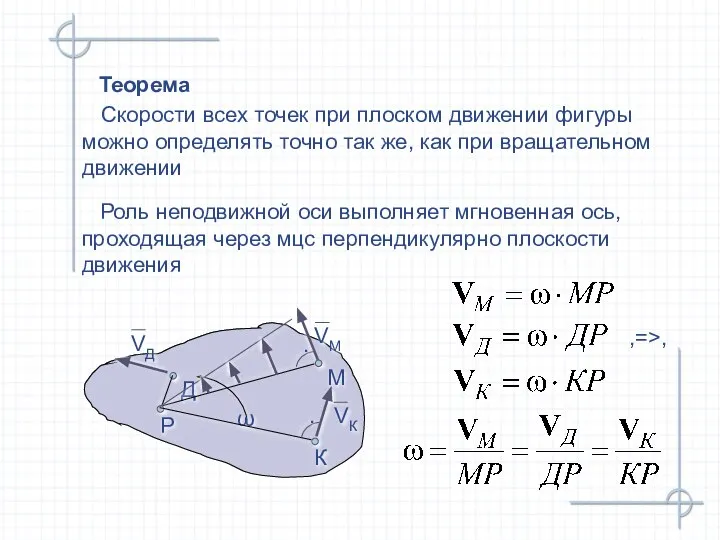
- 37. Теорема Скорости всех точек при плоском движении фигуры можно определять точно так же, как при вращательном
- 38. Выводы 1. Для определения мцс надо знать только направление скоростей двух каких-нибудь точек плоской фигуры (или
- 39. 3. Угловая скорость плоской фигуры в каждый момент времени равна отношению скорости какой-нибудь точки фигуры к
- 40. 3.5. Частные случаи определения МЦС 1. Интуитивный Точка соприкосновения неподвижной поверхности и катящегося без скольжения диска
- 41. (·)Р – МЦС (·)А и (·)К принадлежат II колесу, => Свойство пропорции Если VA || VK
- 42. 3. Случай мгновенно поступательного движения 4. Если известна скорость какой-либо (·)В и угловая скорость тела, то
- 43. 3.6. Определение ускорений точек при ППД (7) продифференцируем
- 44. Пример. Два колеса соединены водилом ОА. I-е колесо вращается с угловой скоростью ωI относительно неподвижного шарнира
- 45. Можем найти линейное ускорение любой точки колеса II О А K где
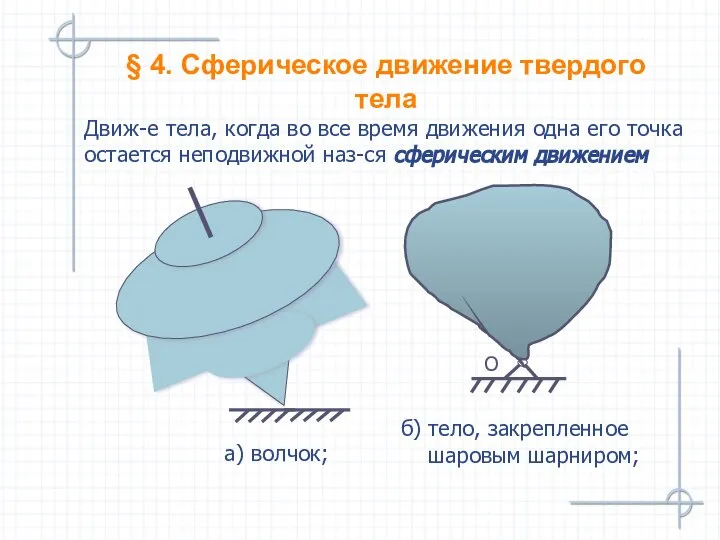
- 46. § 4. Сферическое движение твердого тела б) тело, закрепленное шаровым шарниром; Движ-е тела, когда во все
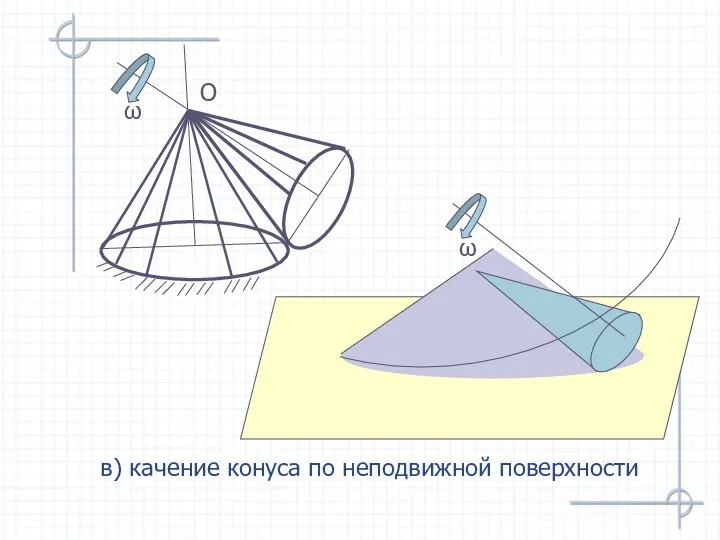
- 47. в) качение конуса по неподвижной поверхности
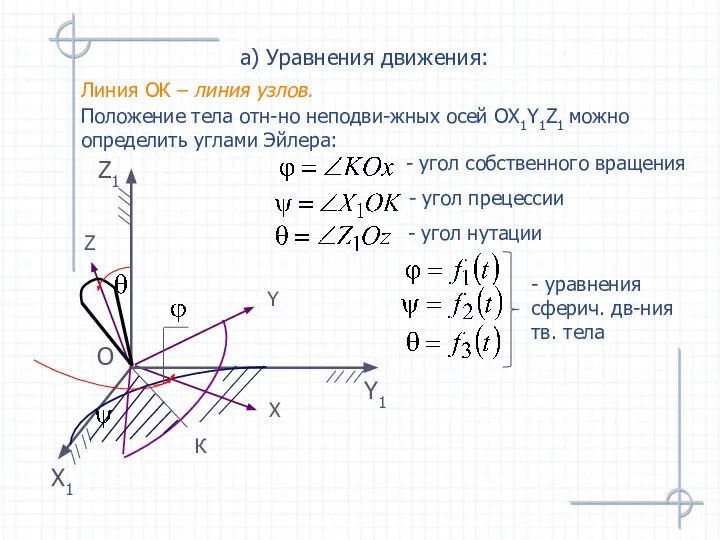
- 48. Линия ОК – линия узлов. а) Уравнения движения: Положение тела отн-но неподви-жных осей ОX1Y1Z1 можно определить
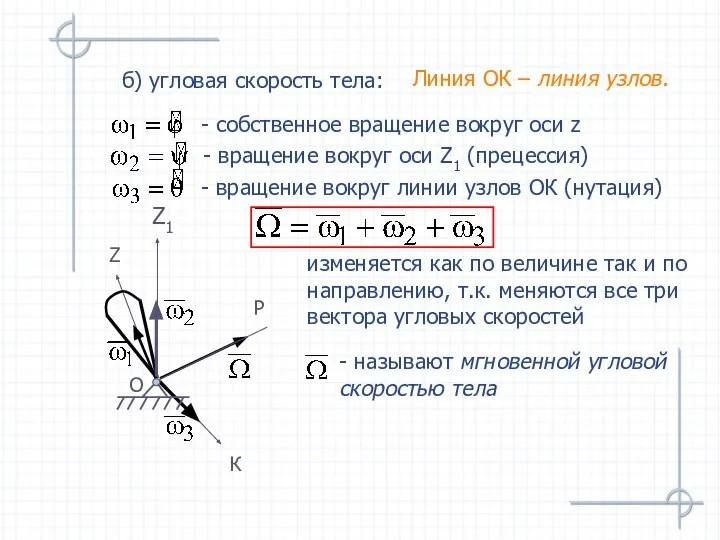
- 49. Линия ОК – линия узлов. б) угловая скорость тела: - собственное вращение вокруг оси z -
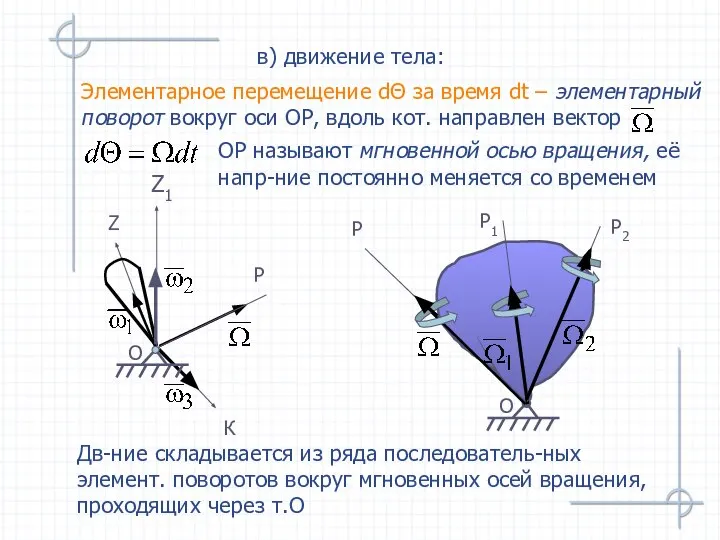
- 50. Элементарное перемещение dΘ за время dt – элементарный поворот вокруг оси ОР, вдоль кот. направлен вектор
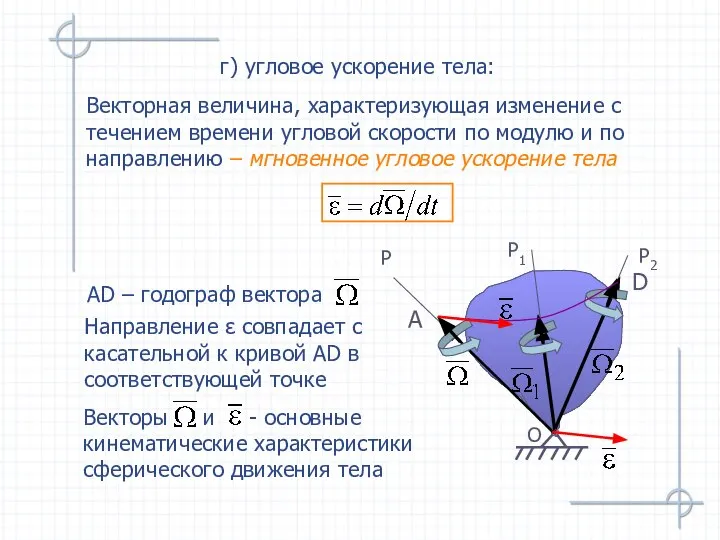
- 51. г) угловое ускорение тела: Направление ε совпадает с касательной к кривой АD в соответствующей точке АD
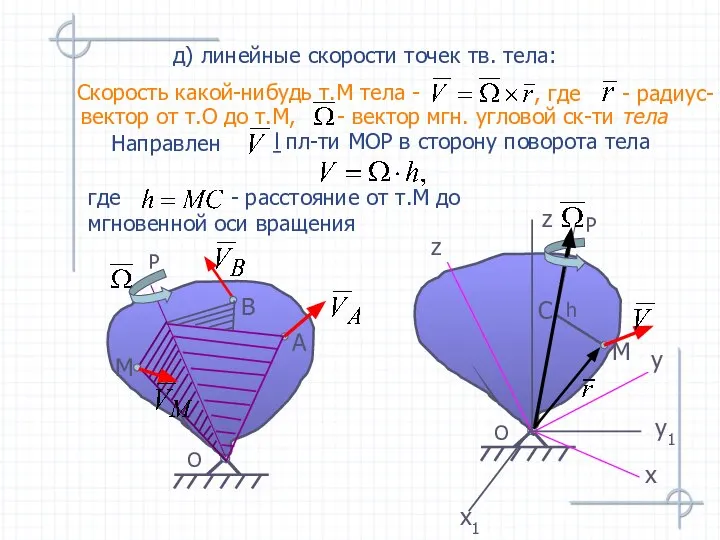
- 52. вектор от т.О до т.М, - вектор мгн. угловой ск-ти тела д) линейные скорости точек тв.
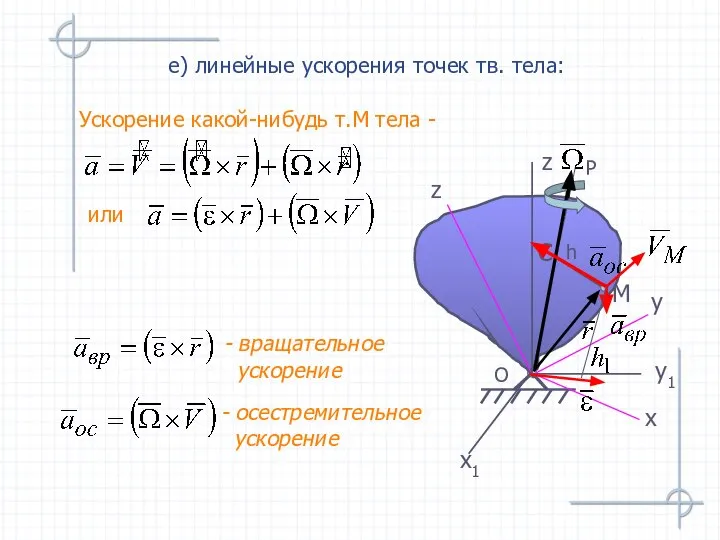
- 53. - вращательное ускорение е) линейные ускорения точек тв. тела: Ускорение какой-нибудь т.М тела - или С
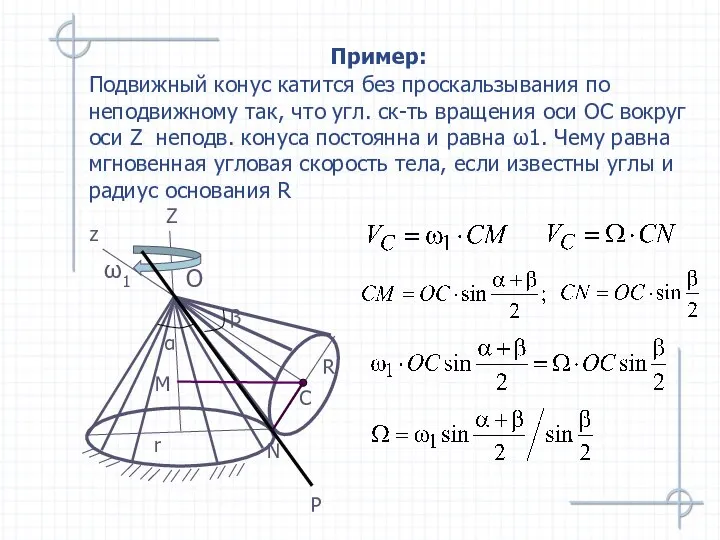
- 54. Пример: Подвижный конус катится без проскальзывания по неподвижному так, что угл. ск-ть вращения оси ОС вокруг
- 55. А § 5. Общий случай движения свободного твердого тела (4) – уравнения свободного движения твёрдого тела
- 56. Движение свободного твердого тела в общем случае можно рассматривать как совокупность поступательного движения вместе с точкой
- 58. Скачать презентацию
Слайд 3Виды движения твердого тела
Поступательное движение
Вращательное движение
Плоско-параллельное движение
Сферическое движение
Общий случай движения твердого тела
Виды движения твердого тела
Поступательное движение
Вращательное движение
Плоско-параллельное движение
Сферическое движение
Общий случай движения твердого тела
Слайд 4§ 1. Поступательное движение
твердого тела
Тело совершает поступательное движение, если любая
§ 1. Поступательное движение
твердого тела
Тело совершает поступательное движение, если любая
Слайд 5Теорема, определяющая свойства поступательного движения
При поступательном движении твердого тела все его
Теорема, определяющая свойства поступательного движения
При поступательном движении твердого тела все его
Слайд 9Найдем скорости точек А и В
Найдем скорости точек А и В
Слайд 12 При поступательном движении общую для всех точек тела скорость называют скоростью
При поступательном движении общую для всех точек тела скорость называют скоростью
Слайд 13§ 2. Вращательное движение твердого тела вокруг неподвижной оси
Движение твердого тела
§ 2. Вращательное движение твердого тела вокруг неподвижной оси
Движение твердого тела
Слайд 14 Положение тела однозначно определяется, если задан угол поворота φ = φ(t)
Определим
Положение тела однозначно определяется, если задан угол поворота φ = φ(t)
Определим
Слайд 15Среднюю угловую скорость тела определяют
Определим угловую скорость твердого тела
П2
П1
Мгновенная угловая скорость –
Среднюю угловую скорость тела определяют
Определим угловую скорость твердого тела
П2
П1
Мгновенная угловая скорость –
Слайд 16 В технике при равномерном вращении пользуются n – числом оборотов в
В технике при равномерном вращении пользуются n – числом оборотов в
Слайд 17Угловое ускорение характеризует изменение с течением времени угловой скорости
Определим угловое ускорение твердого
Угловое ускорение характеризует изменение с течением времени угловой скорости
Определим угловое ускорение твердого
Слайд 18Равномерное вращение
Если
то вращение называется равномерным
Закон равномерного вращения твердого тела
С – константа интегрирования
,
Равномерное вращение
Если
то вращение называется равномерным
Закон равномерного вращения твердого тела
С – константа интегрирования
,
Слайд 19Равнопеременное вращение
Если ω и ε имеют одинаковые знаки, то вращение равноускоренное, если
Равнопеременное вращение
Если ω и ε имеют одинаковые знаки, то вращение равноускоренное, если
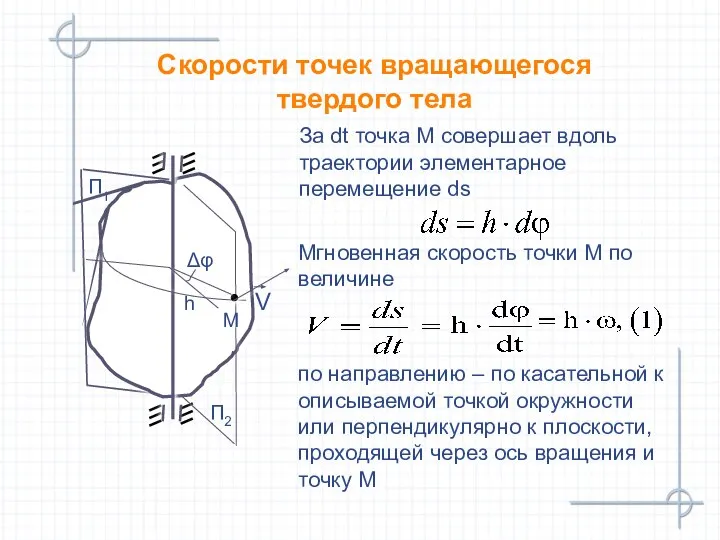
Слайд 20За dt точка М совершает вдоль траектории элементарное перемещение ds
Скорости точек вращающегося
За dt точка М совершает вдоль траектории элементарное перемещение ds
Скорости точек вращающегося
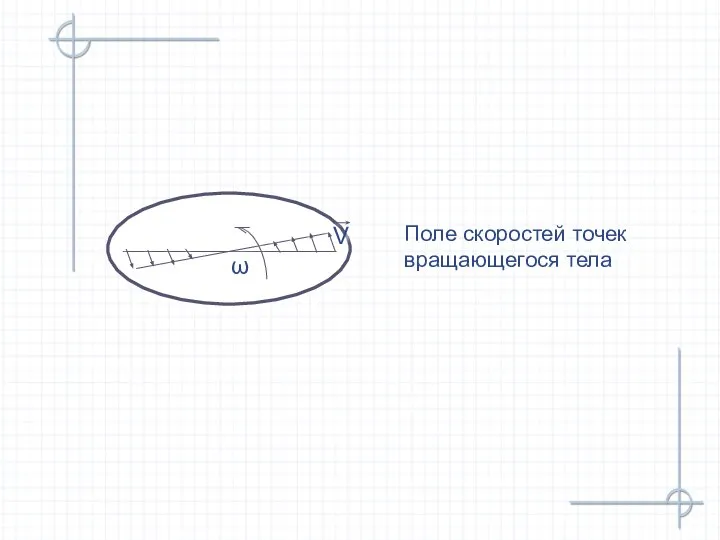
Слайд 21Поле скоростей точек вращающегося тела
Поле скоростей точек вращающегося тела
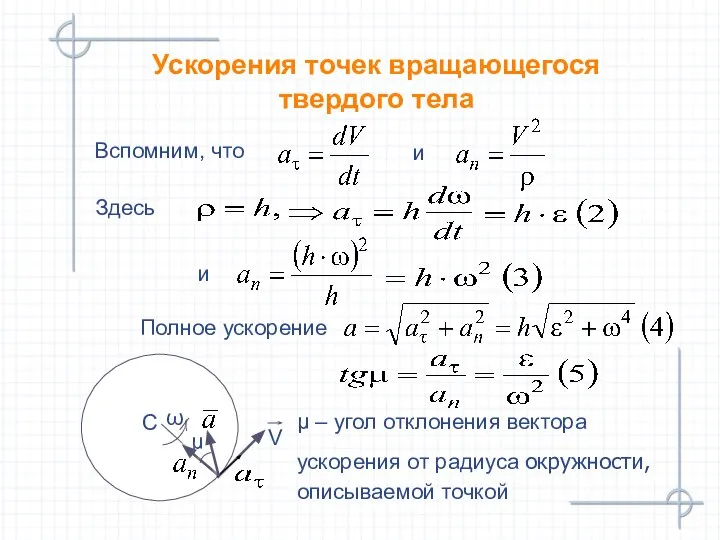
Слайд 22Вспомним, что
Ускорения точек вращающегося
твердого тела
μ
Здесь
Полное ускорение
и
и
C
μ – угол отклонения вектора ускорения
Вспомним, что
Ускорения точек вращающегося
твердого тела
μ
Здесь
Полное ускорение
и
и
C
μ – угол отклонения вектора ускорения
Слайд 23Поле ускорений точек вращающегося тела
Формулы (1)–(5) позволяют определить скорость и ускорение любой
Поле ускорений точек вращающегося тела
Формулы (1)–(5) позволяют определить скорость и ускорение любой
Слайд 24Леонард Эйлер (1707 –1783) показал, что скорость вращающейся точки тела можно определить
Леонард Эйлер (1707 –1783) показал, что скорость вращающейся точки тела можно определить
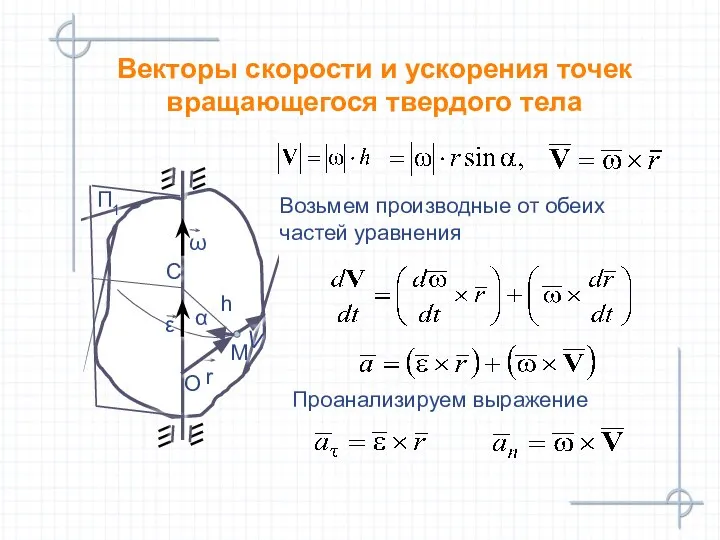
Слайд 25Векторы скорости и ускорения точек вращающегося твердого тела
П1
С
Возьмем производные от обеих частей
Векторы скорости и ускорения точек вращающегося твердого тела
П1
С
Возьмем производные от обеих частей
Слайд 26§ 3. Плоско-параллельное движение твердого тела
Плоско-параллельным (или плоским) движением (ППД) твердого
§ 3. Плоско-параллельное движение твердого тела
Плоско-параллельным (или плоским) движением (ППД) твердого
Слайд 27скорости и ускорения, т.к. эта прямая движется поступательно, оставаясь всегда ḻ к
скорости и ускорения, т.к. эта прямая движется поступательно, оставаясь всегда ḻ к
Слайд 28 Положение фигуры в плоскости П2 по отношению к неподвижной системе координат
Положение фигуры в плоскости П2 по отношению к неподвижной системе координат
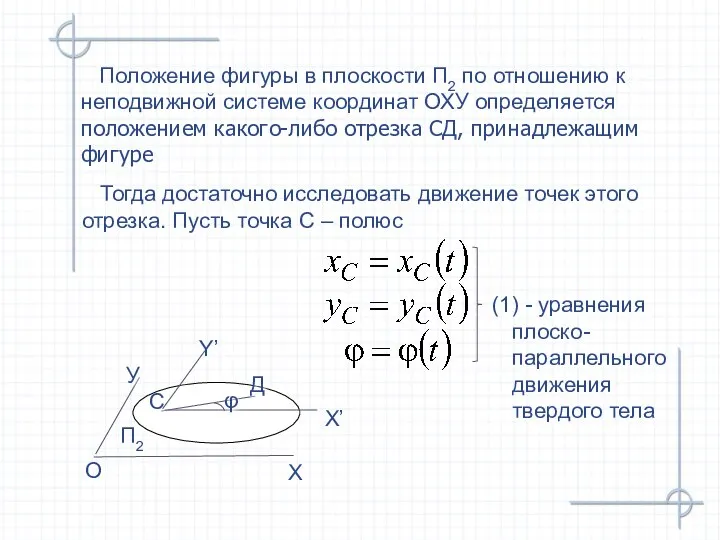
Слайд 29 Теорема. Всякое конечное перемещение плоской фигуры в её плоскости может быть
Теорема. Всякое конечное перемещение плоской фигуры в её плоскости может быть
Слайд 30 Для характеристики вращательного движения вокруг подвижной оси, проходящей через полюс, введем
Для характеристики вращательного движения вокруг подвижной оси, проходящей через полюс, введем
Слайд 31А – полюс; М – произвольная точка плоской фигуры;
3.2. Определение
А – полюс; М – произвольная точка плоской фигуры;
3.2. Определение
Слайд 32Скорости точек плоской фигуры
(4)
Скорость любой точки М плоской фигуры равна геометрической
Скорости точек плоской фигуры
(4)
Скорость любой точки М плоской фигуры равна геометрической
Слайд 33(5)
Вращательная скорость VMA определяется численно и по направлению так же, как
(5)
Вращательная скорость VMA определяется численно и по направлению так же, как
Слайд 34(6)
3.3. Теорема о проекциях скоростей
Найдем скорость точки В. Пусть точка А
(6)
3.3. Теорема о проекциях скоростей
Найдем скорость точки В. Пусть точка А
Слайд 35Пример
B
A
Пример
B
A
Слайд 36 3.4. Мгновенный центр скоростей (мцс)
Мгновенный центр скоростей (мцс) – это
3.4. Мгновенный центр скоростей (мцс)
Мгновенный центр скоростей (мцс) – это
Слайд 37Теорема
Скорости всех точек при плоском движении фигуры можно определять точно так
Теорема
Скорости всех точек при плоском движении фигуры можно определять точно так
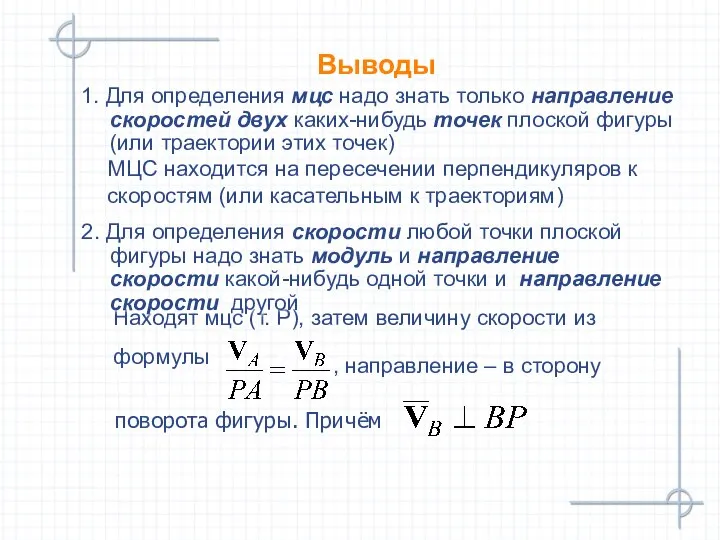
Слайд 38Выводы
1. Для определения мцс надо знать только направление скоростей двух каких-нибудь точек
Выводы
1. Для определения мцс надо знать только направление скоростей двух каких-нибудь точек
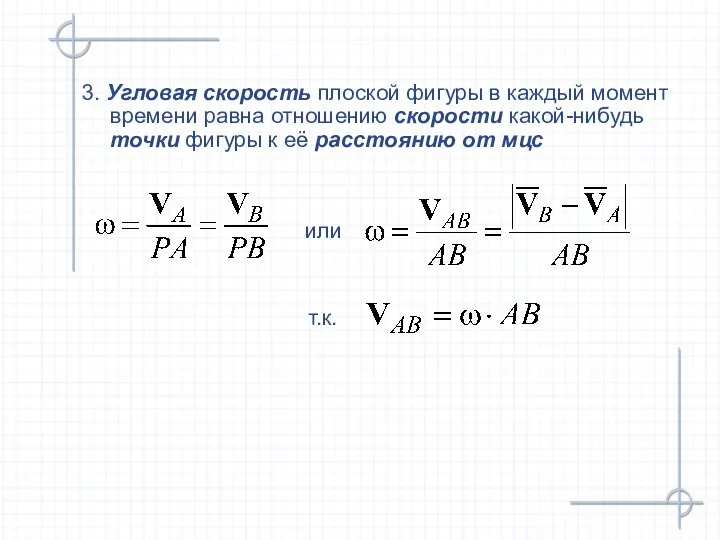
Слайд 393. Угловая скорость плоской фигуры в каждый момент времени равна отношению скорости
3. Угловая скорость плоской фигуры в каждый момент времени равна отношению скорости
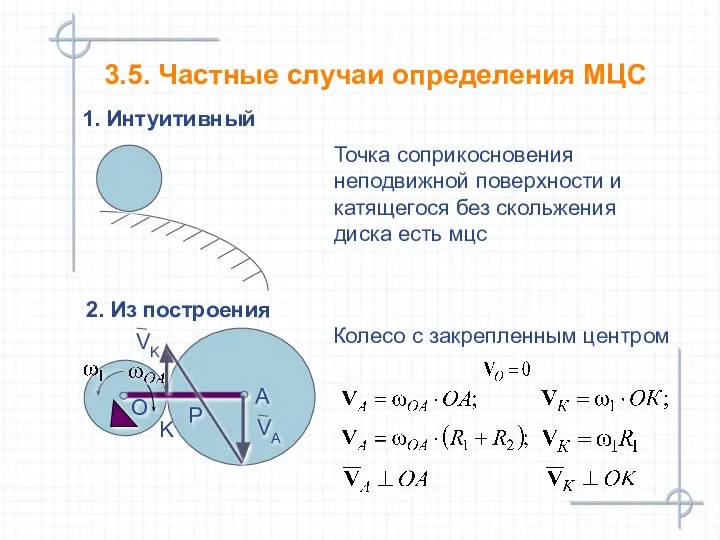
Слайд 40 3.5. Частные случаи определения МЦС
1. Интуитивный
Точка соприкосновения неподвижной поверхности и катящегося
3.5. Частные случаи определения МЦС
1. Интуитивный
Точка соприкосновения неподвижной поверхности и катящегося
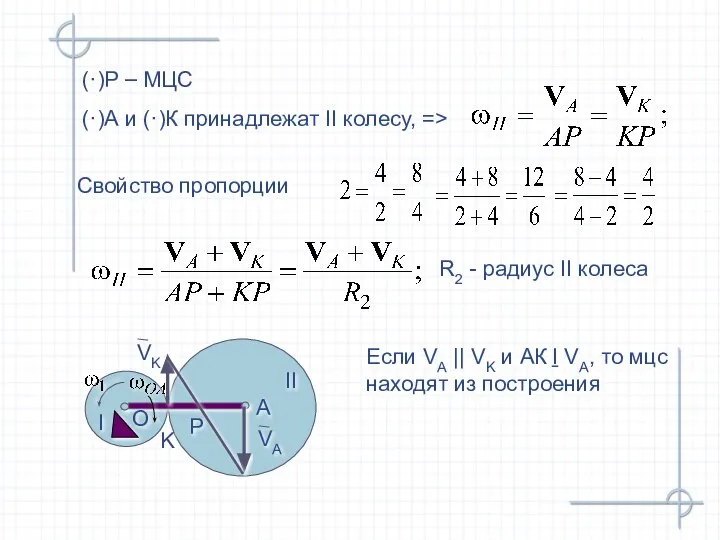
Слайд 41(·)Р – МЦС
(·)А и (·)К принадлежат II колесу, =>
Свойство пропорции
Если
(·)Р – МЦС
(·)А и (·)К принадлежат II колесу, =>
Свойство пропорции
Если
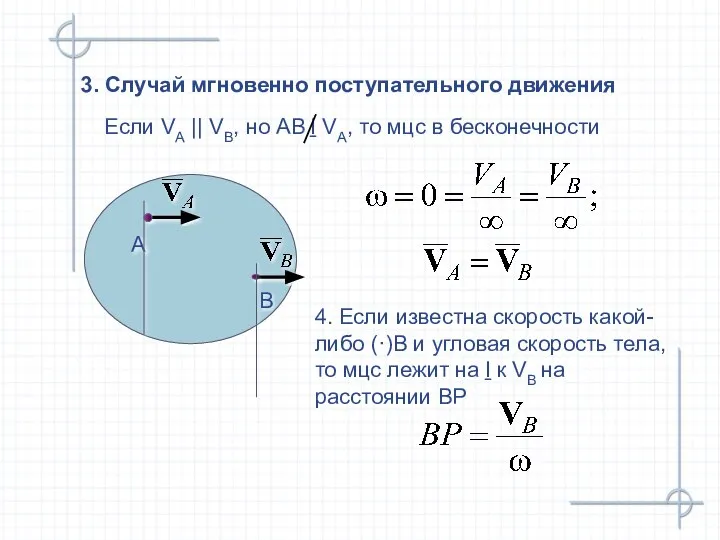
Слайд 423. Случай мгновенно поступательного движения
4. Если известна скорость какой-либо (·)В и угловая
3. Случай мгновенно поступательного движения
4. Если известна скорость какой-либо (·)В и угловая
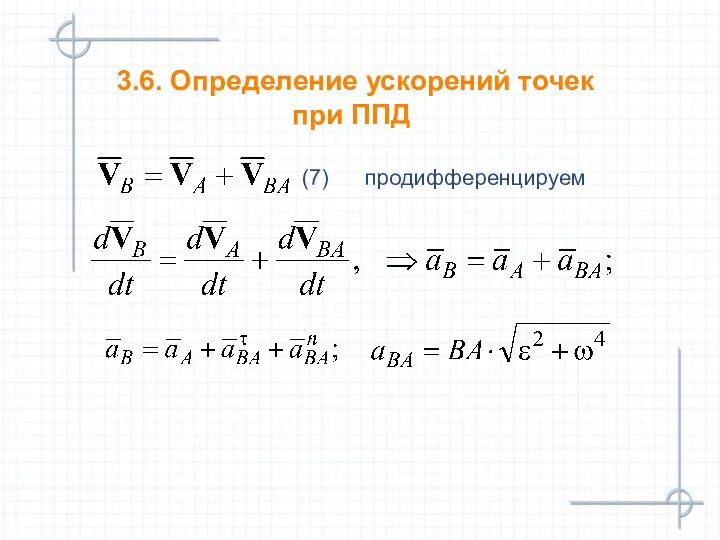
Слайд 43 3.6. Определение ускорений точек
при ППД
(7) продифференцируем
3.6. Определение ускорений точек
при ППД
(7) продифференцируем
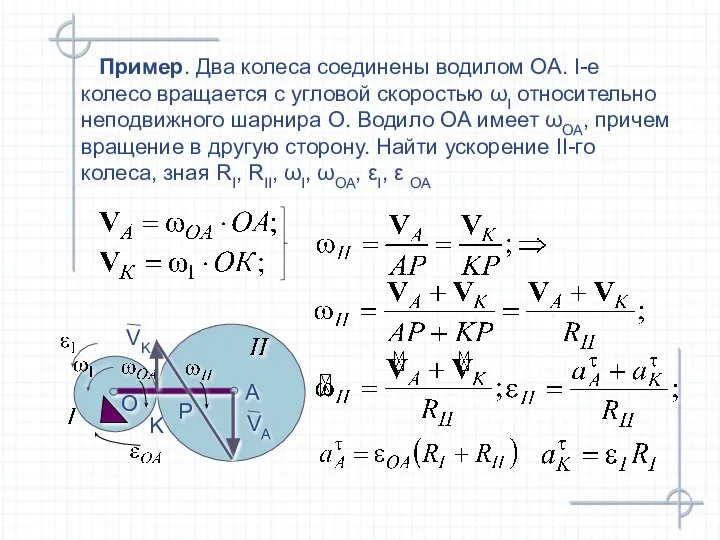
Слайд 44 Пример. Два колеса соединены водилом ОА. I-е колесо вращается с угловой
Пример. Два колеса соединены водилом ОА. I-е колесо вращается с угловой
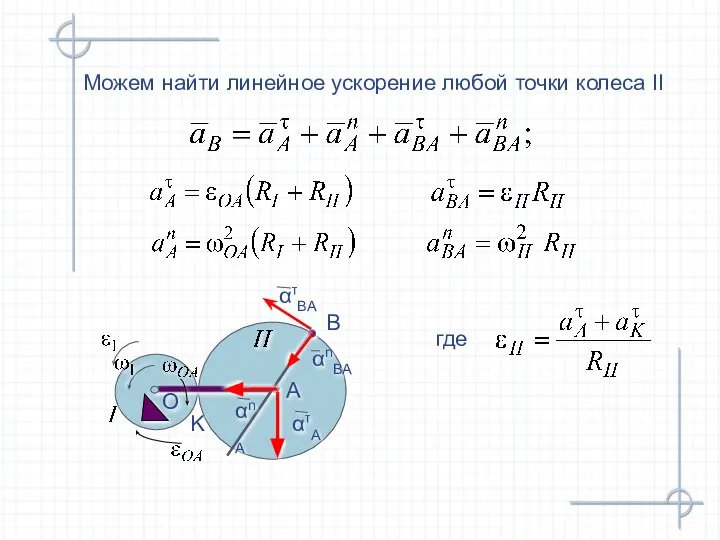
Слайд 45Можем найти линейное ускорение любой точки колеса II
О
А
K
где
Можем найти линейное ускорение любой точки колеса II
О
А
K
где
Слайд 46§ 4. Сферическое движение твердого тела
б) тело, закрепленное шаровым шарниром;
Движ-е тела, когда
§ 4. Сферическое движение твердого тела
б) тело, закрепленное шаровым шарниром;
Движ-е тела, когда
Слайд 47в) качение конуса по неподвижной поверхности
в) качение конуса по неподвижной поверхности
Слайд 48Линия ОК – линия узлов.
а) Уравнения движения:
Положение тела отн-но неподви-жных осей
Линия ОК – линия узлов.
а) Уравнения движения:
Положение тела отн-но неподви-жных осей
Слайд 49Линия ОК – линия узлов.
б) угловая скорость тела:
- собственное вращение вокруг
Линия ОК – линия узлов.
б) угловая скорость тела:
- собственное вращение вокруг
Слайд 50Элементарное перемещение dΘ за время dt – элементарный поворот вокруг оси ОР,
Элементарное перемещение dΘ за время dt – элементарный поворот вокруг оси ОР,
Слайд 51г) угловое ускорение тела:
Направление ε совпадает с касательной к кривой АD в
г) угловое ускорение тела:
Направление ε совпадает с касательной к кривой АD в
Слайд 52вектор от т.О до т.М, - вектор мгн. угловой ск-ти тела
д) линейные
вектор от т.О до т.М, - вектор мгн. угловой ск-ти тела
д) линейные
Слайд 53- вращательное ускорение
е) линейные ускорения точек тв. тела:
Ускорение какой-нибудь т.М тела -
или
С
-
- вращательное ускорение
е) линейные ускорения точек тв. тела:
Ускорение какой-нибудь т.М тела -
или
С
-
Слайд 54Пример:
Подвижный конус катится без проскальзывания по неподвижному так, что угл. ск-ть вращения
Пример:
Подвижный конус катится без проскальзывания по неподвижному так, что угл. ск-ть вращения
Слайд 55А
§ 5. Общий случай движения свободного твердого тела
(4) – уравнения свободного движения
А
§ 5. Общий случай движения свободного твердого тела
(4) – уравнения свободного движения
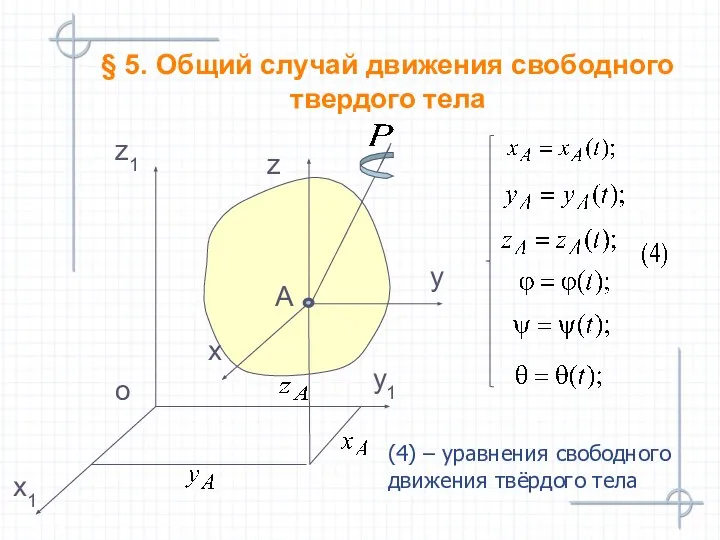
Слайд 56Движение свободного твердого тела в общем случае можно рассматривать как совокупность поступательного
Движение свободного твердого тела в общем случае можно рассматривать как совокупность поступательного
 Разработка проекта устройства снижающего тяжесть последствий при потере устойчивости дорожных катков и компакторов
Разработка проекта устройства снижающего тяжесть последствий при потере устойчивости дорожных катков и компакторов 2_kurs_lektsia_1_2
2_kurs_lektsia_1_2 Механическая энергия
Механическая энергия Исследование изображений, даваемых линзой
Исследование изображений, даваемых линзой Теория относительности
Теория относительности Молния. Гроза́
Молния. Гроза́ Презентация на тему Диффузия в газах жидкостях и твердых телах (7 класс)
Презентация на тему Диффузия в газах жидкостях и твердых телах (7 класс)  9 класс
9 класс Организация технического обслуживания и диагностики с разработкой шиномонтажного стенда
Организация технического обслуживания и диагностики с разработкой шиномонтажного стенда М.В. Ломоносов, его вклад в развитие физики
М.В. Ломоносов, его вклад в развитие физики Явление электромагнитной индукции. Опыты Фарадея
Явление электромагнитной индукции. Опыты Фарадея Виды теплопередачи. Тепловые явления
Виды теплопередачи. Тепловые явления Виды теплопередачи
Виды теплопередачи Передача электроэнергии от источника к потребителю
Передача электроэнергии от источника к потребителю Презентация на тему Вещества в электрическом поле
Презентация на тему Вещества в электрическом поле  Стихотворение Ученье - свет, а не ученье - тьма
Стихотворение Ученье - свет, а не ученье - тьма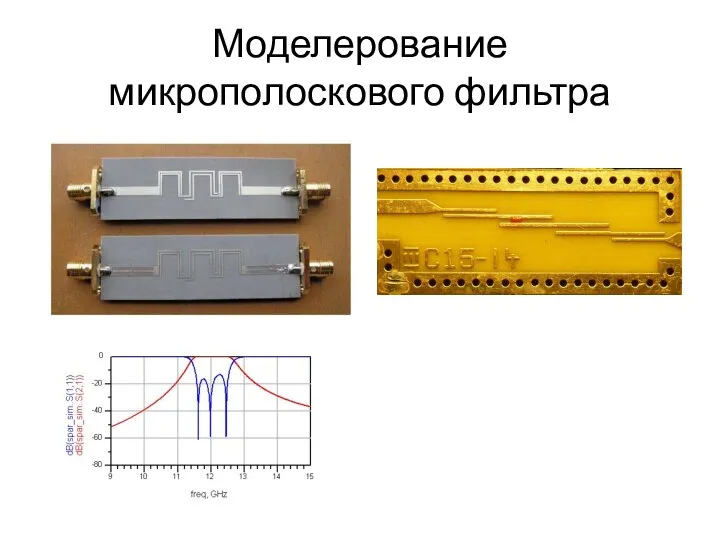 Моделерование микрополоскового фильтра
Моделерование микрополоскового фильтра Классификация нагрузок
Классификация нагрузок ЯМР-спектроскопия. Часть 1
ЯМР-спектроскопия. Часть 1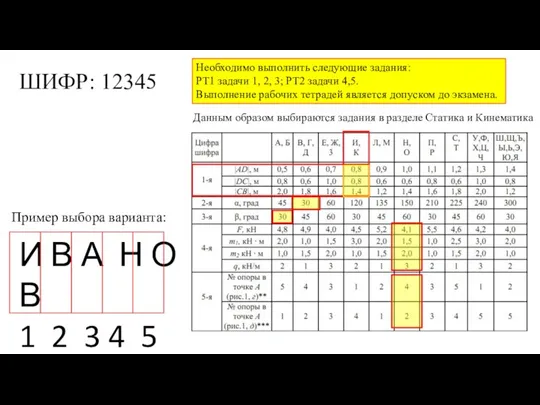 Выбор варианта задания
Выбор варианта задания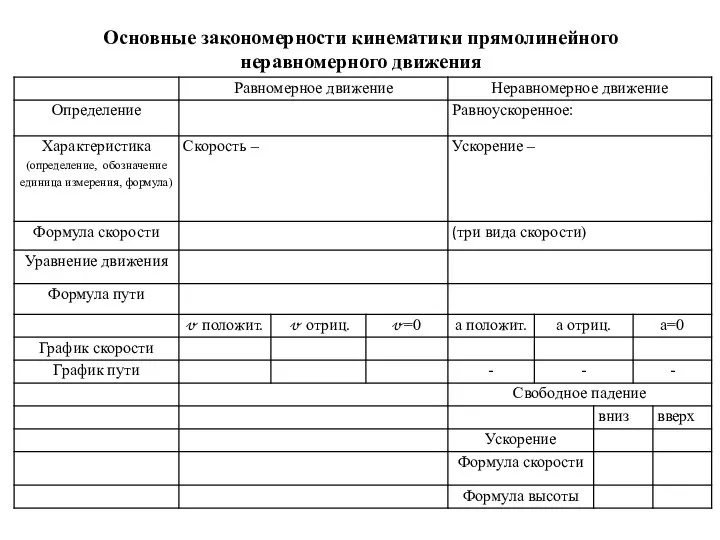 Закономерности кинематики прямолинейного неравномерного движения. Таблица
Закономерности кинематики прямолинейного неравномерного движения. Таблица Джеймс Клерк (Кларк) Максвелл
Джеймс Клерк (Кларк) Максвелл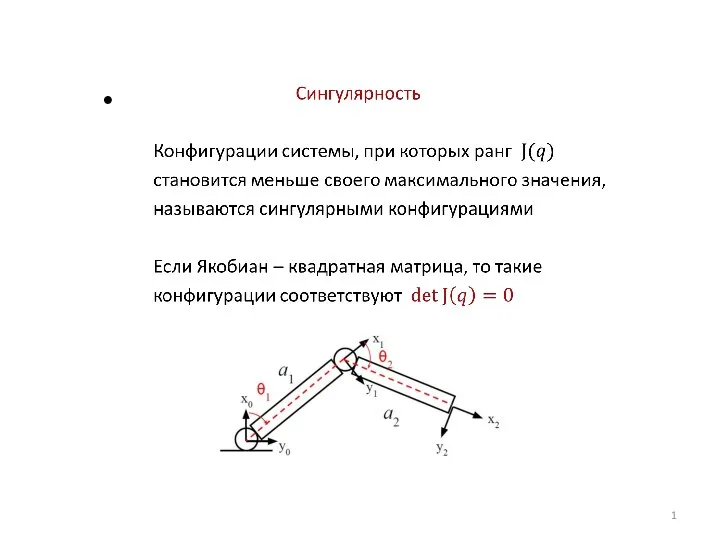 Сингулярность. Сингулярные конфигурации
Сингулярность. Сингулярные конфигурации Проектирование и укрепление откосов от размыва
Проектирование и укрепление откосов от размыва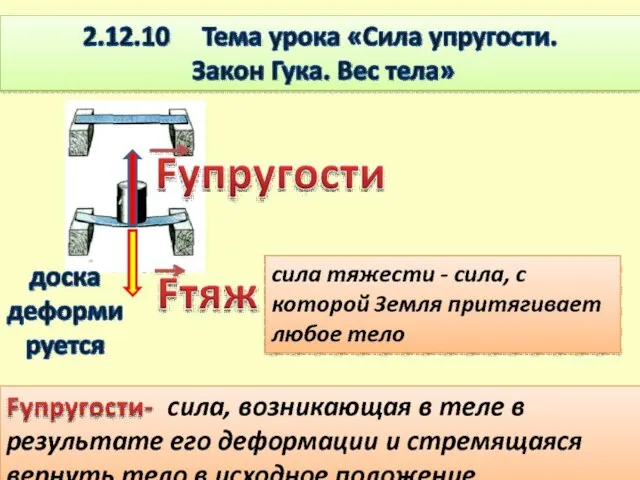 Презентация на тему Сила упругости. Закон Гука. Вес тела
Презентация на тему Сила упругости. Закон Гука. Вес тела  Стандартная атмосфера. Лекция 4
Стандартная атмосфера. Лекция 4 Вес тела
Вес тела Принципы действия тепловых двигателей
Принципы действия тепловых двигателей