Опрделение силы веса, координат центра тяжести и предельных значений статических углов против опрокидывания трактора
- Опрделение силы веса, координат центра тяжести и предельных значений статических углов против опрокидывания трактора

Содержание
- 2. Испытания проводятся на стенде с поворотной динамометрической платформой. Объект исследования - трактор МТЗ-80 с незаполненными баками.
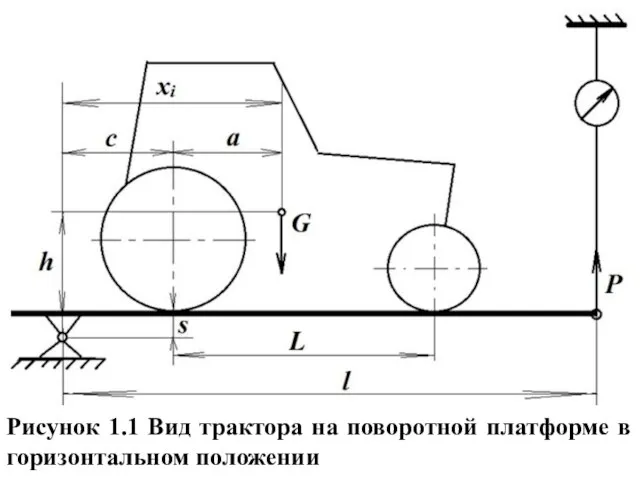
- 3. Рисунок 1.1 Вид трактора на поворотной платформе в горизонтальном положении
- 4. Порядок выполнения работы: По динамометру замеряется вес пустой платформы при различных углах поворота платформы (α =
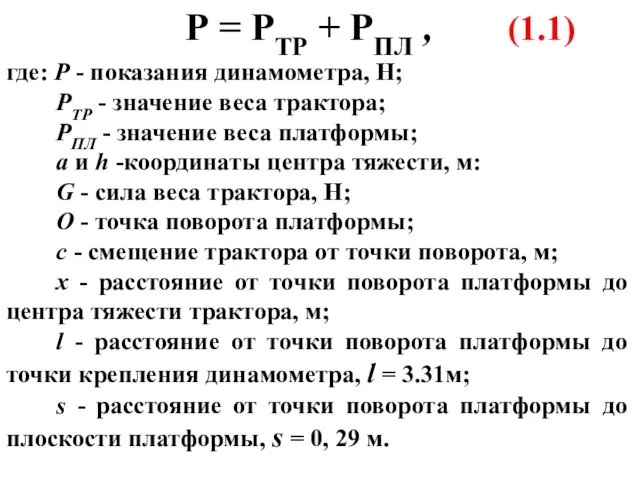
- 5. Р = РТР + РПЛ , (1.1) где: Р - показания динамометра, Н; РТР - значение
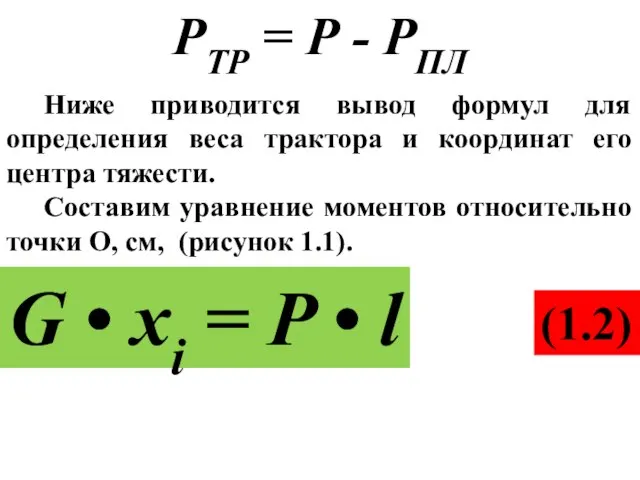
- 6. РТР = Р - РПЛ Ниже приводится вывод формул для определения веса трактора и координат его
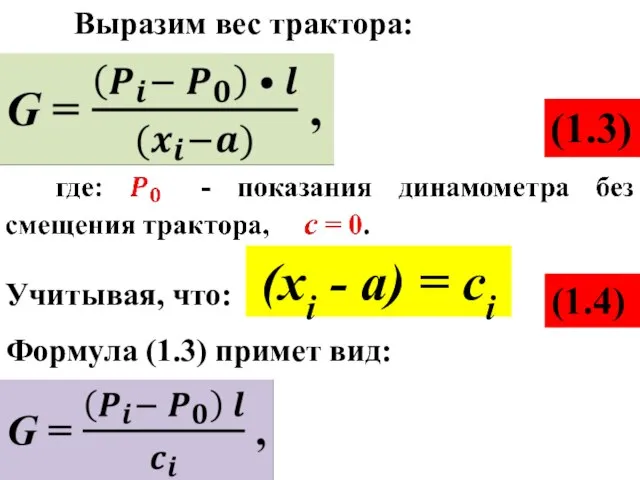
- 7. Выразим вес трактора: (1.3) Учитывая, что: (xi - a) = ci (1.4) Формула (1.3) примет вид:
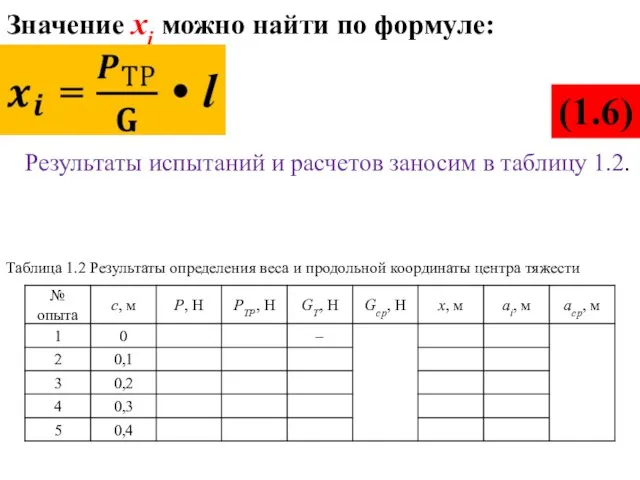
- 8. Значение xi можно найти по формуле: (1.6) Результаты испытаний и расчетов заносим в таблицу 1.2. Таблица
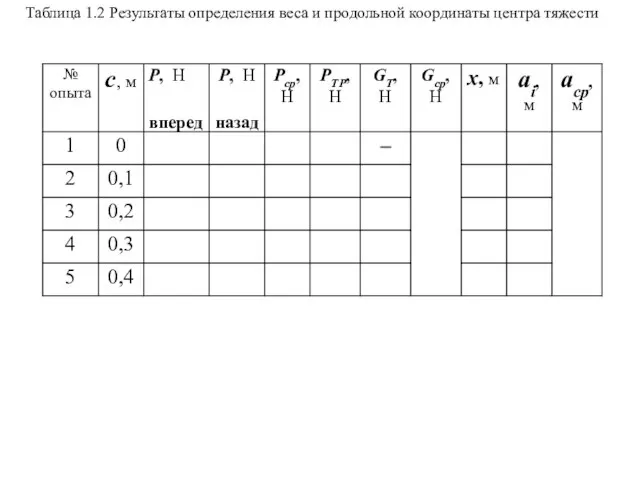
- 9. Таблица 1.2 Результаты определения веса и продольной координаты центра тяжести
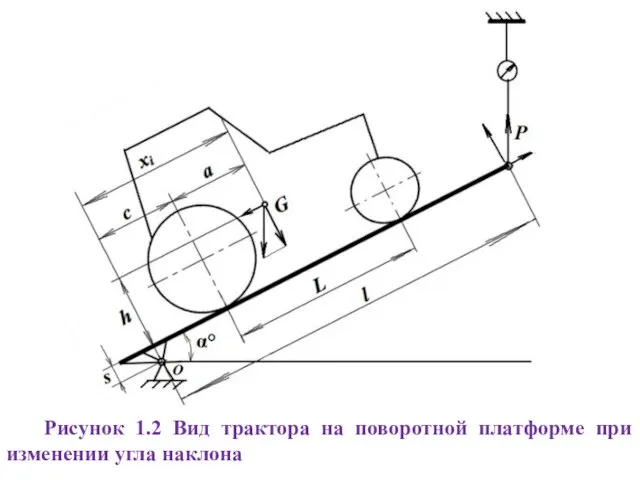
- 10. Рисунок 1.2 Вид трактора на поворотной платформе при изменении угла наклона
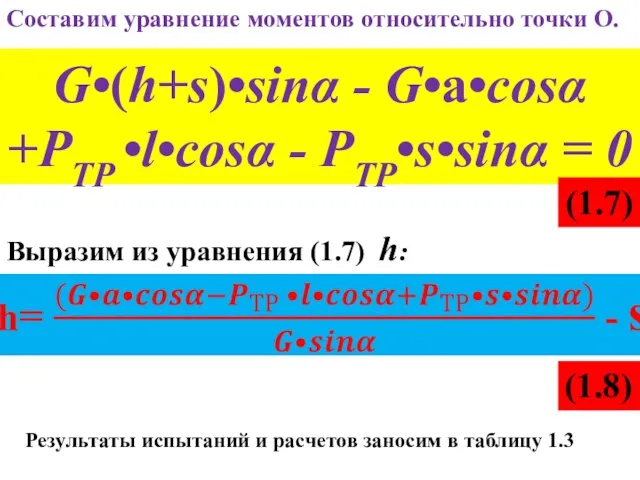
- 11. Составим уравнение моментов относительно точки О. G•(h+s)•sinα - G•a•cosα +PТР •l•cosα - PТР•s•sinα = 0 (1.7)
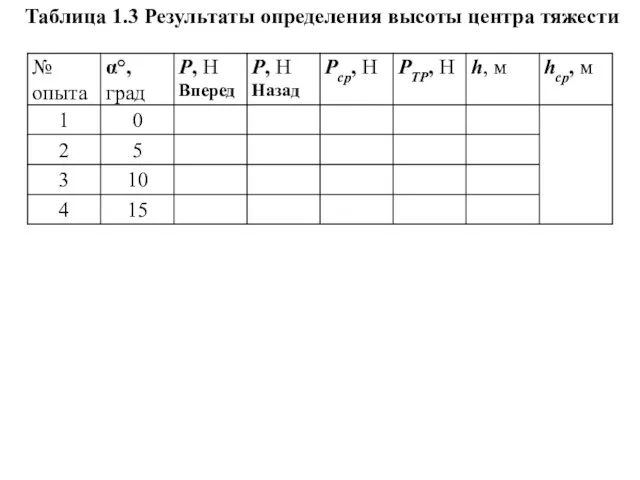
- 12. Таблица 1.3 Результаты определения высоты центра тяжести
- 14. Скачать презентацию
Слайд 2Испытания проводятся на стенде с поворотной динамометрической платформой.
Объект исследования - трактор МТЗ-80
Испытания проводятся на стенде с поворотной динамометрической платформой.
Объект исследования - трактор МТЗ-80
Слайд 3Рисунок 1.1 Вид трактора на поворотной платформе в горизонтальном положении
Рисунок 1.1 Вид трактора на поворотной платформе в горизонтальном положении
Слайд 4Порядок выполнения работы:
По динамометру замеряется вес пустой платформы при различных углах поворота
Порядок выполнения работы:
По динамометру замеряется вес пустой платформы при различных углах поворота
Слайд 5Р = РТР + РПЛ , (1.1)
где: Р - показания динамометра, Н;
РТР -
Р = РТР + РПЛ , (1.1)
где: Р - показания динамометра, Н;
РТР -
Слайд 6РТР = Р - РПЛ
Ниже приводится вывод формул для определения веса трактора
РТР = Р - РПЛ
Ниже приводится вывод формул для определения веса трактора
Слайд 7Выразим вес трактора:
(1.3)
Учитывая, что:
(xi - a) = ci
(1.4)
Формула (1.3) примет вид:
Выразим вес трактора:
(1.3)
Учитывая, что:
(xi - a) = ci
(1.4)
Формула (1.3) примет вид:
Слайд 8Значение xi можно найти по формуле:
(1.6)
Результаты испытаний и расчетов заносим в таблицу
Значение xi можно найти по формуле:
(1.6)
Результаты испытаний и расчетов заносим в таблицу
Слайд 9Таблица 1.2 Результаты определения веса и продольной координаты центра тяжести
Таблица 1.2 Результаты определения веса и продольной координаты центра тяжести
Слайд 10Рисунок 1.2 Вид трактора на поворотной платформе при изменении угла наклона
Рисунок 1.2 Вид трактора на поворотной платформе при изменении угла наклона
Слайд 11Составим уравнение моментов относительно точки О.
G•(h+s)•sinα - G•a•cosα +PТР •l•cosα - PТР•s•sinα
Составим уравнение моментов относительно точки О.
G•(h+s)•sinα - G•a•cosα +PТР •l•cosα - PТР•s•sinα
Слайд 12Таблица 1.3 Результаты определения высоты центра тяжести
Таблица 1.3 Результаты определения высоты центра тяжести
 Исследователи света и цвета
Исследователи света и цвета =?utf-8?B?0JrQstCw0L3RgtC+0LLRi9C1INC_0L7RgdGC0YPQu9Cw0YLRiyDQkdC+0YDQsC4ucHB0eA==?=
=?utf-8?B?0JrQstCw0L3RgtC+0LLRi9C1INC_0L7RgdGC0YPQu9Cw0YLRiyDQkdC+0YDQsC4ucHB0eA==?= Маятниковые копры
Маятниковые копры Презентация на тему Никола Тесла
Презентация на тему Никола Тесла  Свободные и вынужденные электромагнитные колебания. Колебательный контур. Превращение энергии в колебательных системах
Свободные и вынужденные электромагнитные колебания. Колебательный контур. Превращение энергии в колебательных системах Механическая работа. Единицы работы
Механическая работа. Единицы работы Преломление света. Дисперсия. Цвета тел. (6 класс)
Преломление света. Дисперсия. Цвета тел. (6 класс) Понятие вектора в пространстве
Понятие вектора в пространстве Опыт Эрстеда. Магнитное поле тока. Правило правой руки
Опыт Эрстеда. Магнитное поле тока. Правило правой руки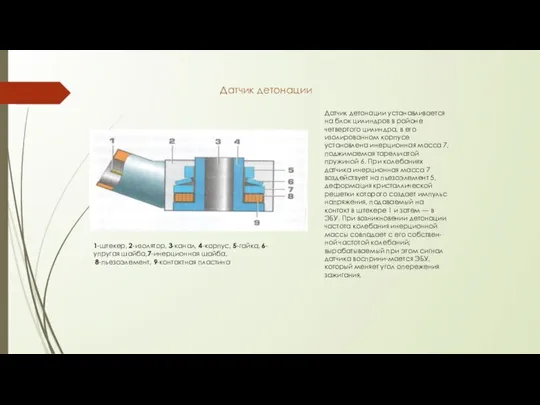 Датчик детонации с подогревом и без подогрева в автомобиле
Датчик детонации с подогревом и без подогрева в автомобиле Космические скорости. 10 класс
Космические скорости. 10 класс Электрические цепи. Тема 11
Электрические цепи. Тема 11 Тезаурус
Тезаурус Поляризация света
Поляризация света Электролиз. Удивительный мир гальваники
Электролиз. Удивительный мир гальваники Инструкция по сборке стальной рамы Prusa i3 Steel Pro для модификации 3d принтера Anet A6
Инструкция по сборке стальной рамы Prusa i3 Steel Pro для модификации 3d принтера Anet A6 Реактивная сила
Реактивная сила Шкала звуковых частот
Шкала звуковых частот Презентация на тему Сила Ампера
Презентация на тему Сила Ампера  Задания по механике
Задания по механике Физика космоса, кружок. Космология в ОТО
Физика космоса, кружок. Космология в ОТО Фейерверки. Скорость звука
Фейерверки. Скорость звука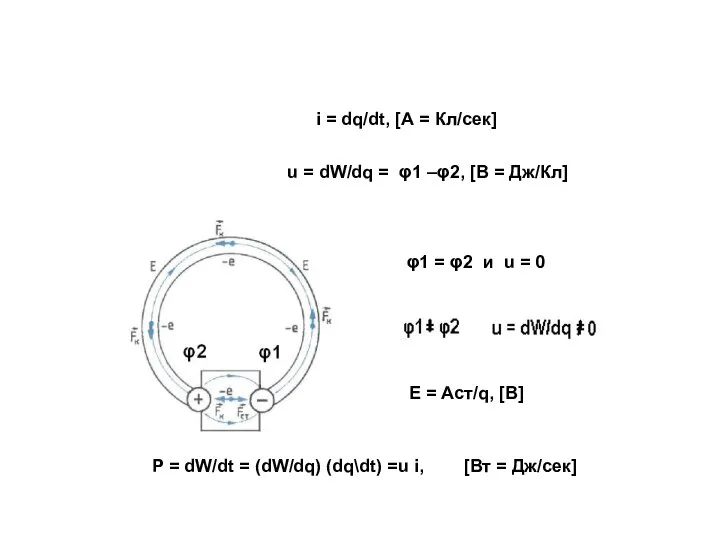 Определение тока и напряжения в идеальных элементах
Определение тока и напряжения в идеальных элементах Военные автомобили СССР
Военные автомобили СССР Люминесценция и светящиеся обои
Люминесценция и светящиеся обои Статистическая радиотехника. Узкополосный случайный процесс
Статистическая радиотехника. Узкополосный случайный процесс методичка1 - Расчет тайминга движущихся предметов
методичка1 - Расчет тайминга движущихся предметов Классификация электротехнических материалов
Классификация электротехнических материалов