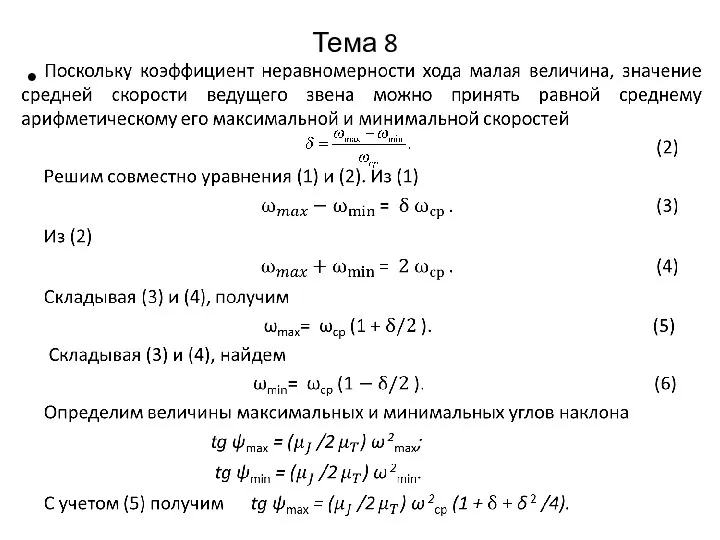
Слайд 4Тема 8
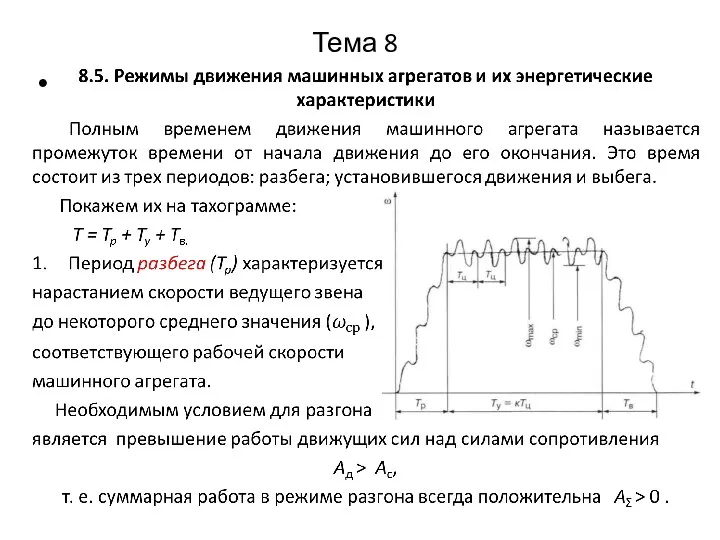
2. Период установившегося движения
(Ту) – период движения, при котором
угловая скорость
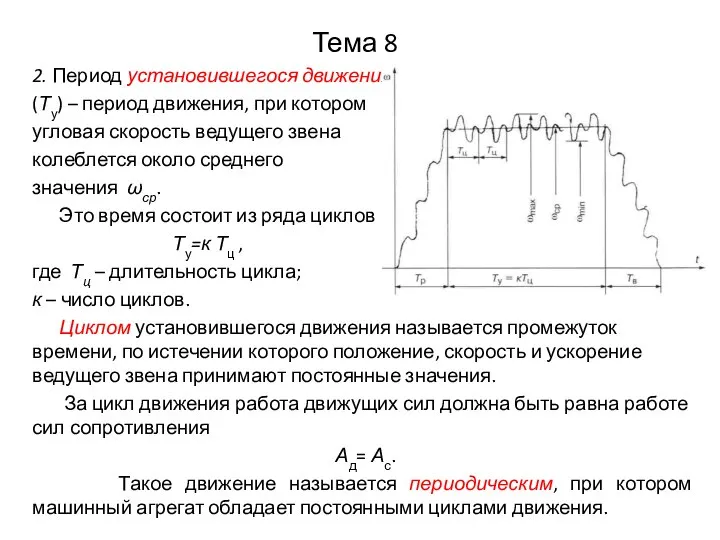
ведущего звена
колеблется около среднего
значения ωср.
Это время состоит из ряда циклов
Ту=к Тц ,
где Тц – длительность цикла;
к – число циклов.
Циклом установившегося движения называется промежуток времени, по истечении которого положение, скорость и ускорение ведущего звена принимают постоянные значения.
За цикл движения работа движущих сил должна быть равна работе сил сопротивления
Ад= Ас.
Такое движение называется периодическим, при котором машинный агрегат обладает постоянными циклами движения.
Слайд 5Тема 8
3. Период выбега или остановки (Тв) –
период времени, в течение
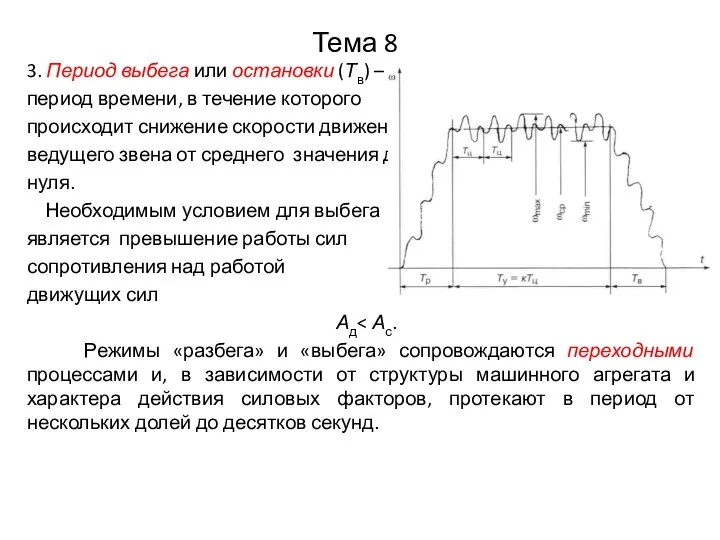
которого
происходит снижение скорости движения
ведущего звена от среднего значения до
нуля.
Необходимым условием для выбега
является превышение работы сил
сопротивления над работой
движущих сил
Ад< Ас.
Режимы «разбега» и «выбега» сопровождаются переходными процессами и, в зависимости от структуры машинного агрегата и характера действия силовых факторов, протекают в период от нескольких долей до десятков секунд.
Слайд 6Тема 8
Исследование переходных режимов необходимо для нахождения времени срабатывания машинного агрегата,
которое определяет быстродействие многих рабочих машин, работающих в так называемых старт-стопных режимах: автооператоры, промышленные роботы и манипуляторы, поворотные и тактовые столы, загрузочные и подающие устройства, вспомогательное технологическое оборудование автоматических линий и т.п.
Стремление к повышению производительности этих устройств может привести к возникновению больших ускорений, вызывающих значительные динамические нагрузки и упругие колебания исполнительных механизмов, которые нарушают точность функционирования, увеличивают время выполнения операций и снижают прочность основных элементов и надежность работы. Таким образом, при создании подобных машин возникает задача учета упругих свойств конструкции и разработки методов и средств ограничения колебательных движений. Кроме того, в периоды разбега и выбега необходимо решать проблему прохода через критические зоны, когда угловая скорость ведущего вала машинного агрегата становится равной одной из собственных частот колебаний, при которых механическая система попадает в резонанс, длительное пребывание в котором может привести к разрушению конструкции.
Слайд 7Тема 8
В режиме установившегося движения работает большинство технологических и энергетических машин:
металлорежущие станки, кривошипные прессы, прокатные станы, электродвигатели, электрогенераторы, насосы, компрессоры, двигатели внутреннего сгорания и т.д. Наилучшим условием работы этих машин является равномерное вращение ведущего звена.
За цикл установившегося движения изменение кинетической энергии равно нулю (ΔT = 0). Однако внутри цикла угловая скорость ведущего звена может меняться из-за несовпадения законов изменения движущих сил и сил сопротивления, а также непостоянства значений приведенного момента инерции машинного агрегата. Например, для механизмов станков и поршневых насосов и компрессоров приведенный момент движущих сил является постоянной величиной, а приведенный момент сил сопротивления − переменной. Для механизмов двигателей внутреннего сгорания и паровых машин постоянным является приведенный момент сил сопротивления, а переменным − приведенный момент движущих сил. Приведенный момент инерции машинного агрегата также является переменной величиной при изменении положений ведущего звена. В результате этого значение скорости движения его ведущего звена колеблется в течение рассматриваемого промежутка времени в некотором диапазоне от максимума до минимума.
Слайд 9Тема 8
Тема 8. Уравнения движения машинного агрегата
и их исследование
8.1. Уравнения движения

машинного агрегата в энергетической
и дифференциальной формах
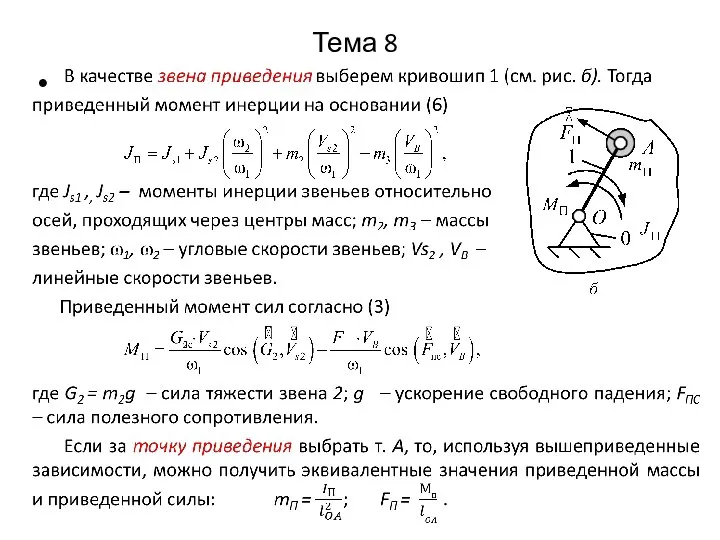
Выполним приведение сил и масс машинного агрегата, выбрав в качестве звена приведения кривошип.
Здесь φ – угол поворота кривошипа;
ω – угловая скорость звена приведения;
In – приведенный момент инерции;
MП – приведенный момент сил.
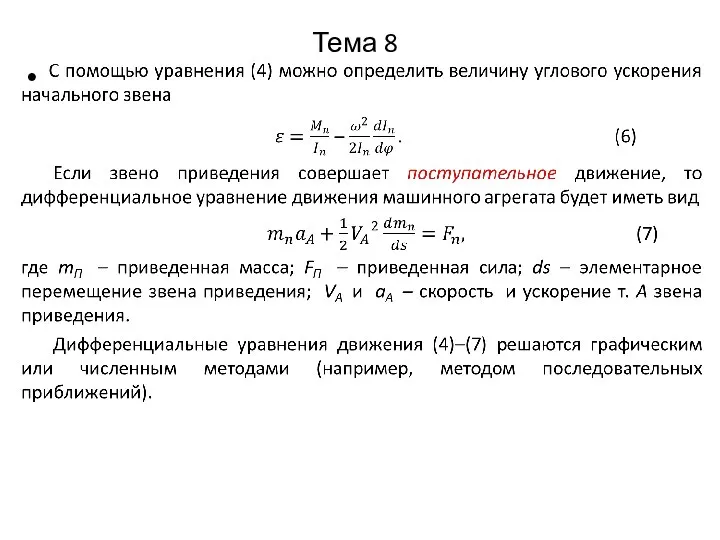
Запишем уравнение, выражающее теорему об изменении кинетической энергии
T – T0 = Ai , (1)
где T0 – кинетическая энергия в начале движения; T – кинетическая энергия в конце движения; Ai – сумма работ внешних сил, действующих на машинный агрегат.
Слайд 10Тема 8
Это уравнение может быть представлено как в энергетической, так и
в дифференциальной формах.
Рассмотрим перемещение звена приведения из начального положения φ0 в некоторое конечное φ под действием момента MП. На основании уравнения (1) получим
(2)
где φ0 , φ – начальное и конечное значения угла поворота; ω0, ω – начальное и конечное значения угловой скорости; Iп0 , Iп – значения приведенного момента инерции в начальном и конечном положениях; MП = Мд – Мс – приведенный момент внешних сил и моментов сил; Мд – приведенный момент движущих сил; Мс– приведенный момент сил сопротивления.
Уравнение (2) называется уравнением движения машинного агрегата в энергетической форме.
В этом уравнении искомой величиной является скорость ω звена приведения (в данном случае – кривошипа). Разрешив его относительно скорости, путем интегрирования можно найти закон движения начального звена машинного агрегата, т.е. решить прямую задачу динамики.
Слайд 14Тема 8
8.2. Графоаналитический метод исследования уравнений движения машинного агрегата
Аналитическое исследование уравнений
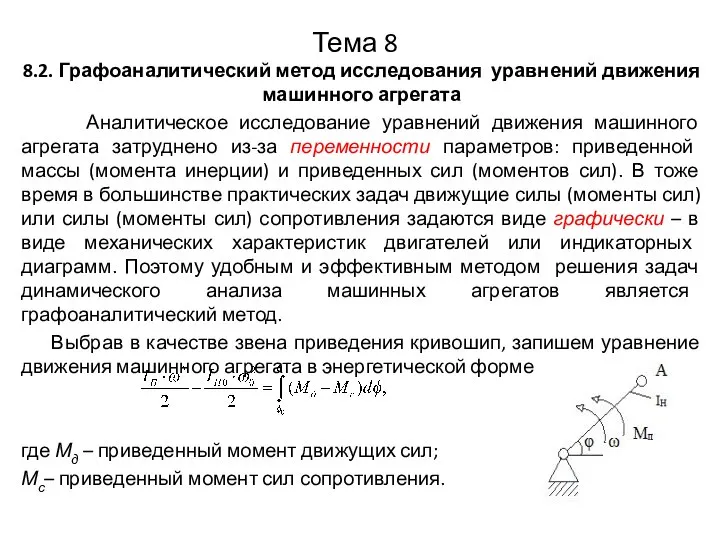
движения машинного агрегата затруднено из-за переменности параметров: приведенной массы (момента инерции) и приведенных сил (моментов сил). В тоже время в большинстве практических задач движущие силы (моменты сил) или силы (моменты сил) сопротивления задаются виде графически – в виде механических характеристик двигателей или индикаторных диаграмм. Поэтому удобным и эффективным методом решения задач динамического анализа машинных агрегатов является графоаналитический метод.
Выбрав в качестве звена приведения кривошип, запишем уравнение движения машинного агрегата в энергетической форме
где Мд – приведенный момент движущих сил;
Мс– приведенный момент сил сопротивления.
Слайд 17Тема 8
Порядок построения диаграммы Виттенбауэра
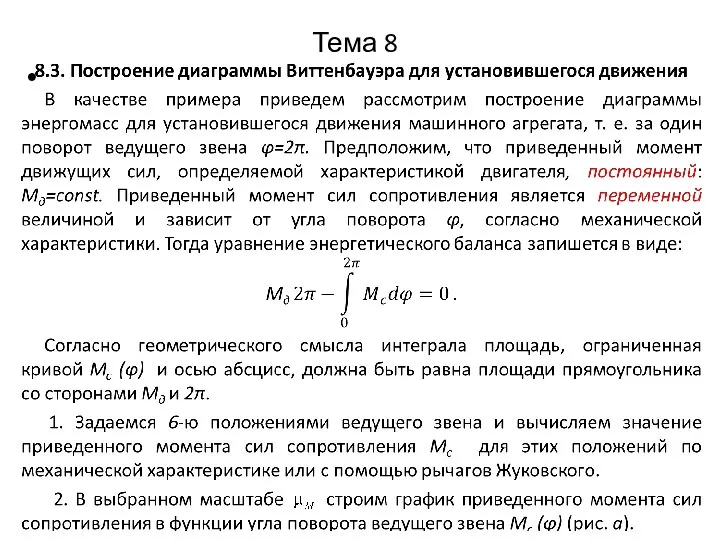
1. Задается несколько (8, 12, 24 и
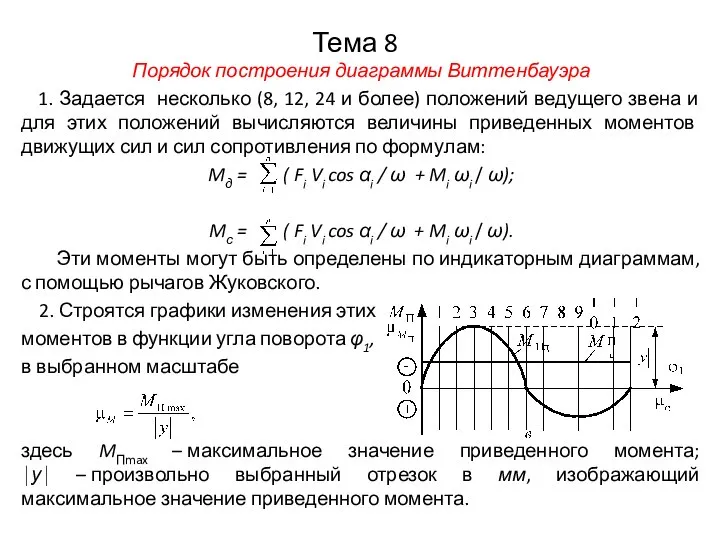
более) положений ведущего звена и для этих положений вычисляются величины приведенных моментов движущих сил и сил сопротивления по формулам:
Mд = ( Fi Vi cos αi / ω + Mi ωi / ω);
Mс = ( Fi Vi cos αi / ω + Mi ωi / ω).
Эти моменты могут быть определены по индикаторным диаграммам, с помощью рычагов Жуковского.
2. Строятся графики изменения этих
моментов в функции угла поворота φ1,
в выбранном масштабе
здесь MПmax – максимальное значение приведенного момента;
⏐у⏐ – произвольно выбранный отрезок в мм, изображающий максимальное значение приведенного момента.
Слайд 18Тема 8
3. Путем графического интегрирования этих
графиков строятся графики работ движущих
моментов и
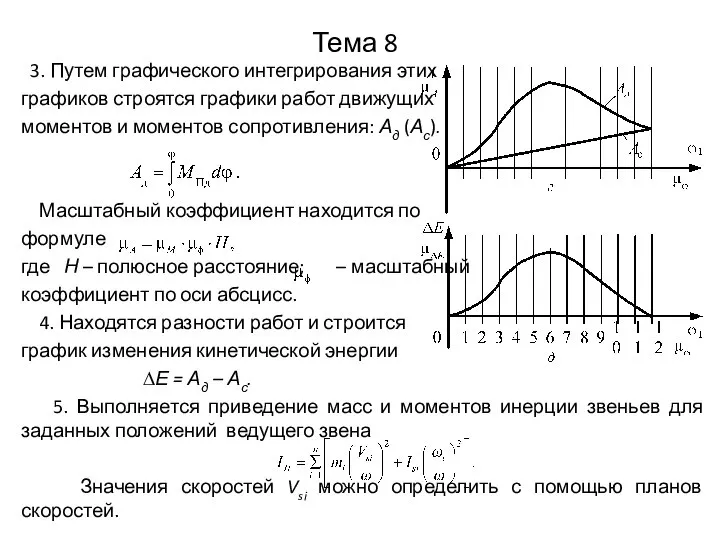
моментов сопротивления: Ад (Ас).
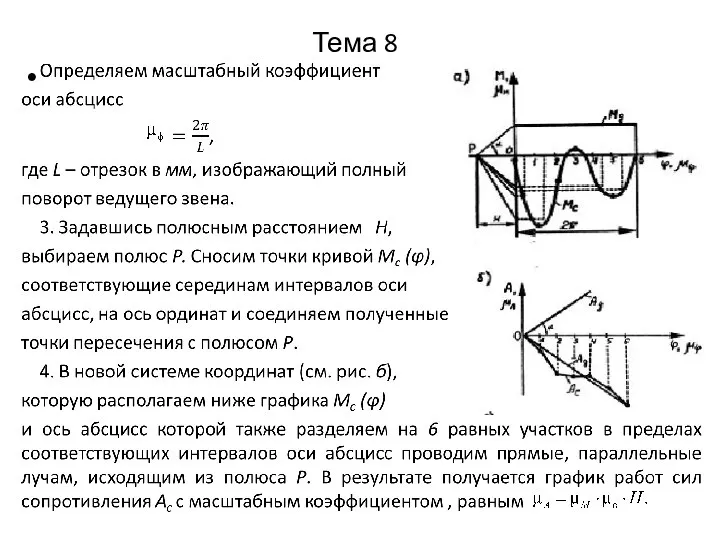
Масштабный коэффициент находится по
формуле
где Н – полюсное расстояние; – масштабный
коэффициент по оси абсцисс.
4. Находятся разности работ и строится
график изменения кинетической энергии
∆Е = Ад – Ас.
5. Выполняется приведение масс и моментов инерции звеньев для заданных положений ведущего звена
Значения скоростей Vsi можно определить с помощью планов скоростей.
Слайд 19Тема 8
6. Строится график изменения приведенного
момента инерции Jп (φ1) в повернутой
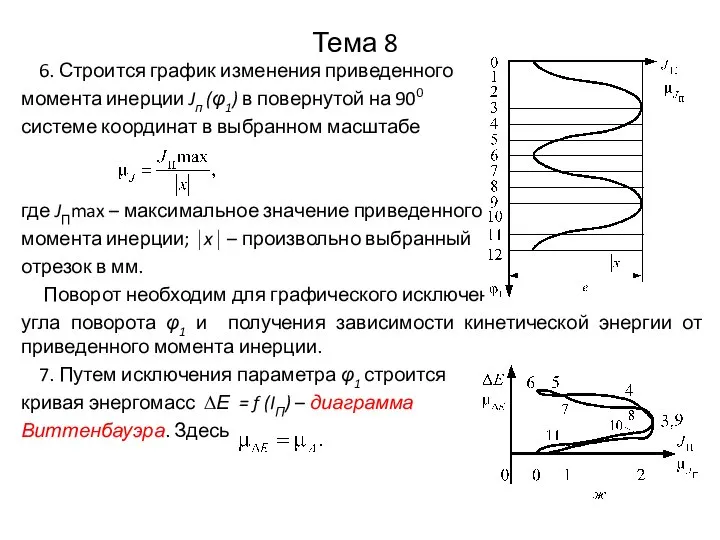
на 900
системе координат в выбранном масштабе
где JПmax – максимальное значение приведенного
момента инерции; ⏐x⏐ – произвольно выбранный
отрезок в мм.
Поворот необходим для графического исключения
угла поворота φ1 и получения зависимости кинетической энергии от приведенного момента инерции.
7. Путем исключения параметра φ1 строится
кривая энергомасс ∆Е = f (IП) – диаграмма
Виттенбауэра. Здесь
Слайд 23Тема 8
5. Строим график работ движущих сил
и определяем величину постоянного момента
движущих
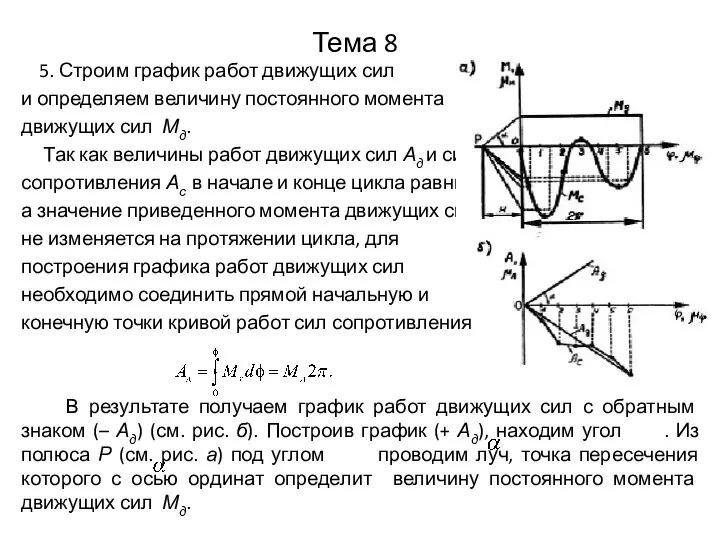
сил Мд.
Так как величины работ движущих сил Ад и сил
сопротивления Ас в начале и конце цикла равны,
а значение приведенного момента движущих сил
не изменяется на протяжении цикла, для
построения графика работ движущих сил
необходимо соединить прямой начальную и
конечную точки кривой работ сил сопротивления
В результате получаем график работ движущих сил с обратным знаком (– Ад) (см. рис. б). Построив график (+ Ад), находим угол . Из полюса Р (см. рис. а) под углом проводим луч, точка пересечения которого с осью ординат определит величину постоянного момента движущих сил Мд.
Слайд 24Тема 8
6. Находим разность работ (Ад – Ас) для каждого
положения ведущего
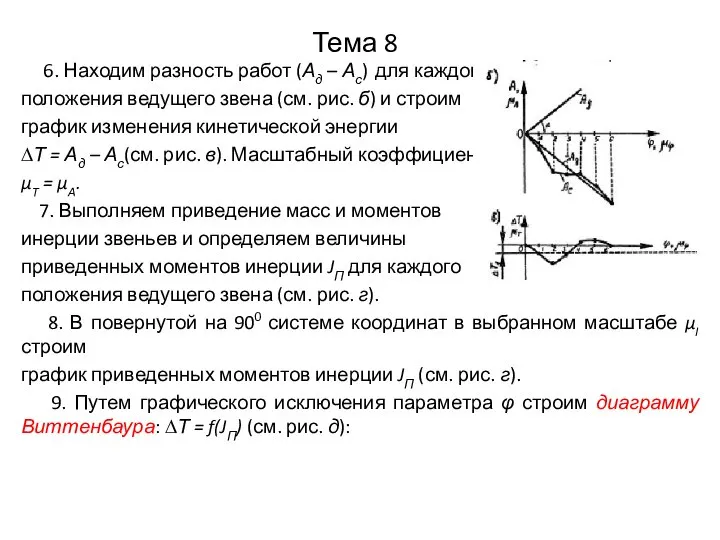
звена (см. рис. б) и строим
график изменения кинетической энергии
∆Т = Ад – Ас(см. рис. в). Масштабный коэффициент
μT = μA.
7. Выполняем приведение масс и моментов
инерции звеньев и определяем величины
приведенных моментов инерции JП для каждого
положения ведущего звена (см. рис. г).
8. В повернутой на 900 системе координат в выбранном масштабе μI строим
график приведенных моментов инерции JП (см. рис. г).
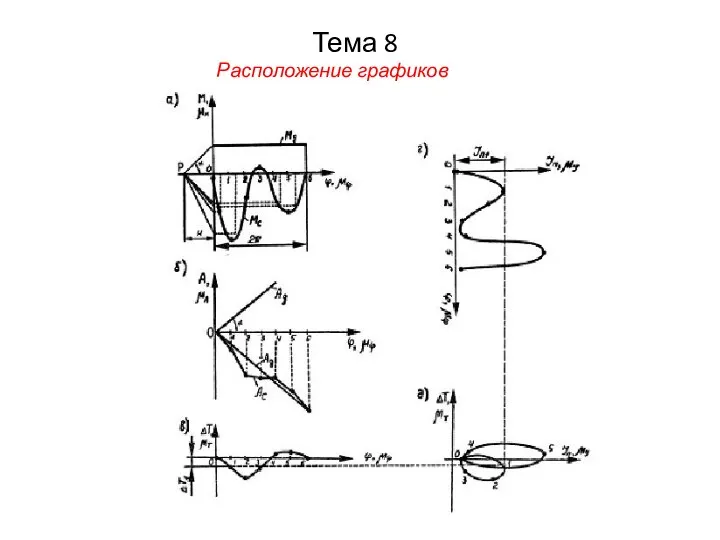
9. Путем графического исключения параметра φ строим диаграмму Виттенбаура: ∆Т = f(JП) (см. рис. д):
Слайд 25Тема 8
Порядок построения диаграммы ∆Т = f(JП)
1) Для угла φ=φ1 отмечается
значение Jn1 и проводится вертикальная прямая;
2) Для этого же значения угла φ1 отмечается значение ∆Т1 и проводится горизонтальная прямая;
3) В пересечении этих прямых получаем точку 1;
4) Повторяем построение для всех положений угла (φ2,φ3…φ6);
5) Полученные точки соединяем плавной кривой.
В установившемся режиме эта кривая должна быть замкнутой.
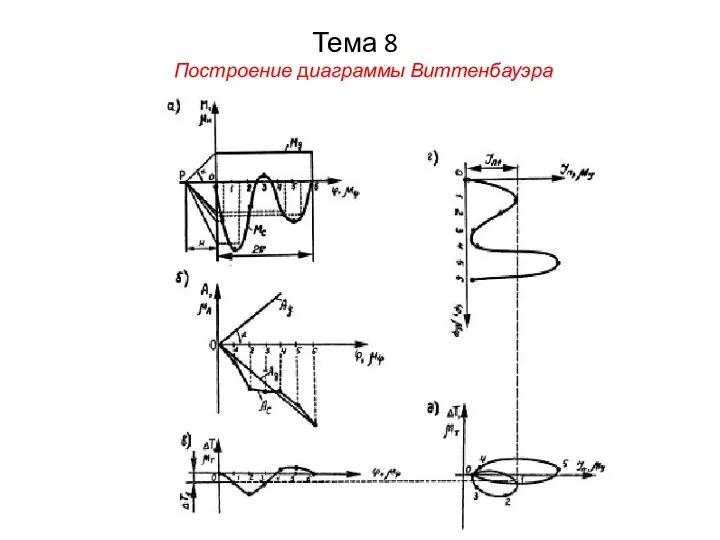
Слайд 26Тема 8
Построение диаграммы Виттенбауэра
Слайд 27Тема 8
8.4. Определение закона движения начального звена
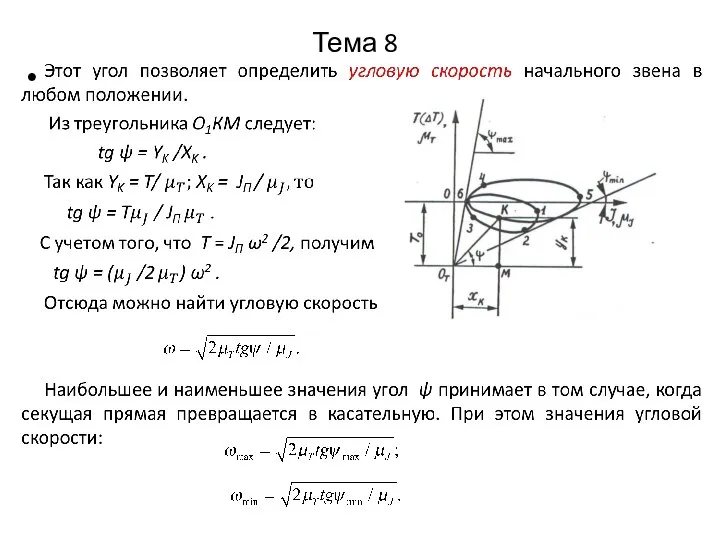
Полученная выше кривая Виттенбауэра позволяет
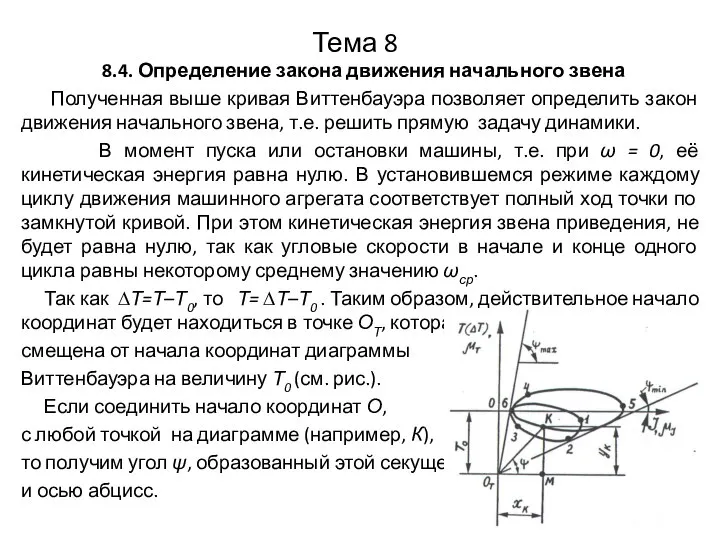
определить закон движения начального звена, т.е. решить прямую задачу динамики.
В момент пуска или остановки машины, т.е. при ω = 0, её кинетическая энергия равна нулю. В установившемся режиме каждому циклу движения машинного агрегата соответствует полный ход точки по замкнутой кривой. При этом кинетическая энергия звена приведения, не будет равна нулю, так как угловые скорости в начале и конце одного цикла равны некоторому среднему значению ωср.
Так как ∆Т=Т–Т0, то Т= ∆Т–Т0 . Таким образом, действительное начало координат будет находиться в точке ОТ, которая
смещена от начала координат диаграммы
Виттенбауэра на величину Т0 (см. рис.).
Если соединить начало координат О,
с любой точкой на диаграмме (например, К),
то получим угол ψ, образованный этой секущей
и осью абцисс.
Слайд 30Тема 8
В случаях, когда установка на приводном валу маховика невозможна по
конструктивным или иным соображениям, для реализации его функций можно использовать уже существующие в структуре машинного агрегата звенья, совершающие вращательные движения: ротор энергетической машины, соединительные муфты, зубчатые колеса, кулачки, шкивы, звездочки и т.п.
Основное назначение маховика состоит в ограничении колебаний угловой скорости приводного вала в пределах, определяемых заданным коэффициентом неравномерности хода.
Определение момента инерции маховика проводится в процессе проектирования машинного агрегата и составляет одну из задач его динамического синтеза.
Эффективным методом решения этой задачи является использование диаграммы Виттенбауэра. Касательные, проведенные к этой диаграмме и соответствующие допустимым для заданного коэффициента неравномерности хода значениям максимальной и минимальной угловой скорости ведущего звена, позволяют определить величину необходимого момента инерции маховика.

 Поиск эффективных способов преобразования энергии морских волн в энергию поступательного движения судна
Поиск эффективных способов преобразования энергии морских волн в энергию поступательного движения судна Презентация на тему Опытная проверка закона Гей - Люссака
Презентация на тему Опытная проверка закона Гей - Люссака  Электромагнитное поле. Викторина
Электромагнитное поле. Викторина Электромагнитные колебания. Превращение энергии в колебательном контуре
Электромагнитные колебания. Превращение энергии в колебательном контуре Оценка угла места в системах локации метрового диапазона
Оценка угла места в системах локации метрового диапазона Бионика. Аэродинамические прототипы
Бионика. Аэродинамические прототипы Полная ревизия буксового узла подготовил студент группы ТАВХ-311
Полная ревизия буксового узла подготовил студент группы ТАВХ-311 Действие магнитного поля на проводник с током и движущуюся заряженную частицу
Действие магнитного поля на проводник с током и движущуюся заряженную частицу Составные части велосипеда
Составные части велосипеда Антуан Анри Беккерель
Антуан Анри Беккерель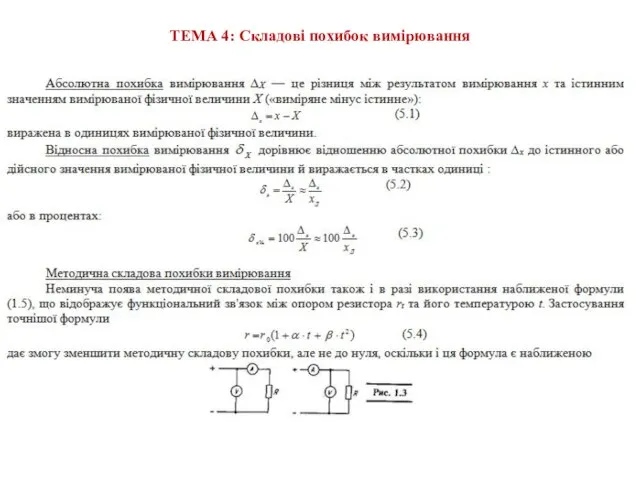 Складові похибок вимірювання. Тема 4
Складові похибок вимірювання. Тема 4 Устройство системы смазки двигателя. Назначение общее устройство системы смазки автомобильных двигателей
Устройство системы смазки двигателя. Назначение общее устройство системы смазки автомобильных двигателей Звездный час. Урок – игра
Звездный час. Урок – игра Статика
Статика Примеры физических явлений
Примеры физических явлений Potential Flow Theory
Potential Flow Theory Тепловое движение. Температура
Тепловое движение. Температура Спектроскопия упруго-рассеянных электронов на отражение
Спектроскопия упруго-рассеянных электронов на отражение Диэлектрические свойства полимеров
Диэлектрические свойства полимеров Электрические цепи со взаимной индукцией
Электрические цепи со взаимной индукцией Путешествие по океану Знаний
Путешествие по океану Знаний Маятник с инерционным маховиком
Маятник с инерционным маховиком Теория и практика формообразования заготовок
Теория и практика формообразования заготовок Основные понятия и определения. Рабочий процесс. Схема одноцилиндрового четырехтактного двигателя
Основные понятия и определения. Рабочий процесс. Схема одноцилиндрового четырехтактного двигателя Магнитная индукция
Магнитная индукция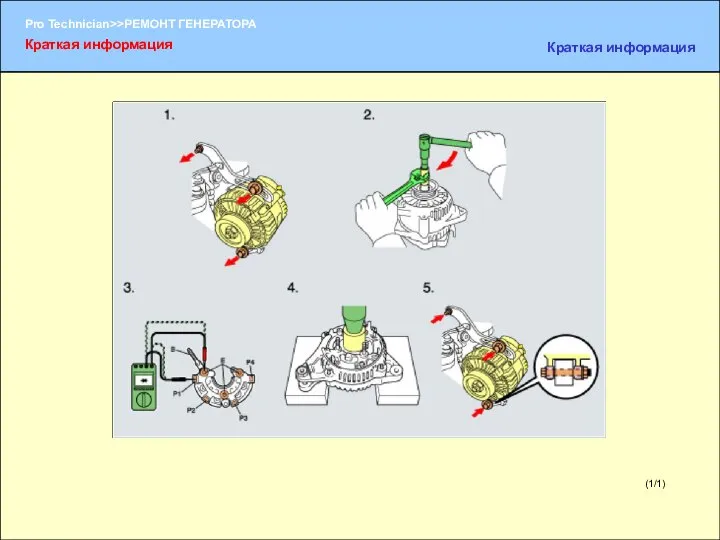 Ремонт генератора
Ремонт генератора Презентация на тему Кинетическая и потенциальная энергия
Презентация на тему Кинетическая и потенциальная энергия  Муфта сцепления на тракторе
Муфта сцепления на тракторе