- Биомехатронные системы. Лекция 1. Двойной маятник

Содержание
- 2. Двойной маятник: оптимальное управление раскачиванием и торможением Лекция 1 Гимнаст раскачивается на перекладине, управляя, в основном,
- 3. Другой пример
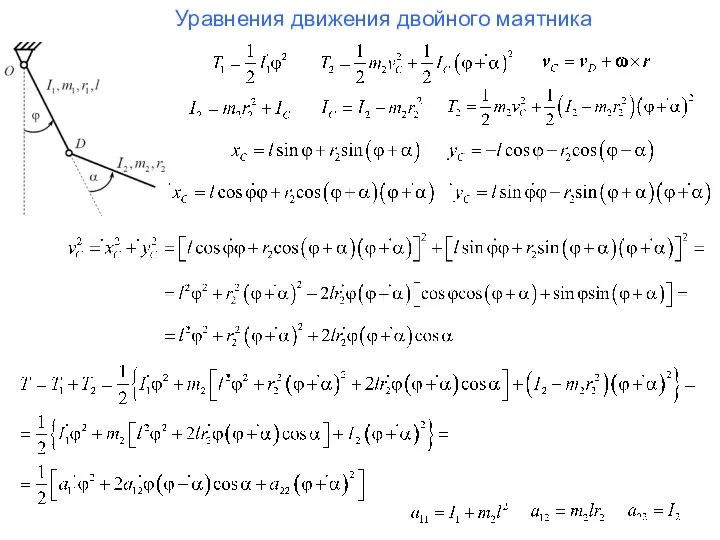
- 4. Уравнения движения двойного маятника
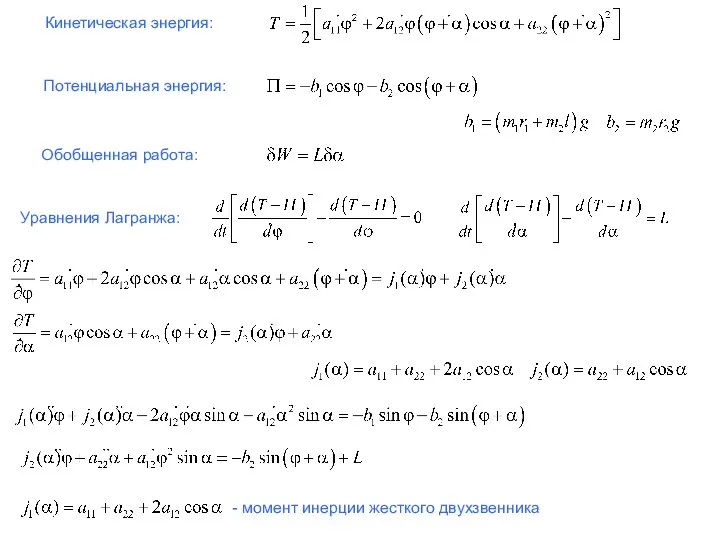
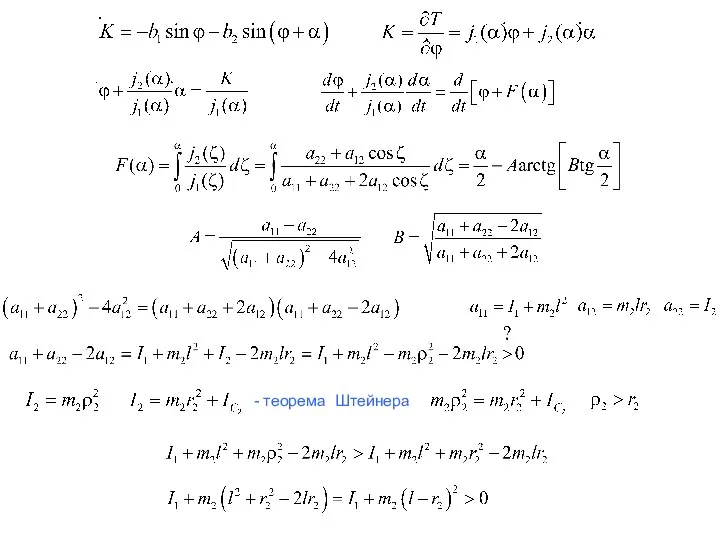
- 5. Кинетическая энергия: Потенциальная энергия: Обобщенная работа: Уравнения Лагранжа: - момент инерции жесткого двухзвенника
- 6. - теорема Штейнера
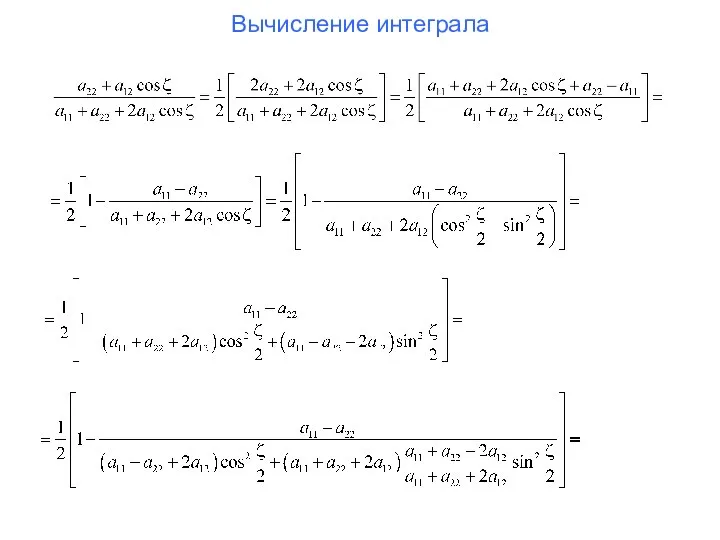
- 7. Вычисление интеграла
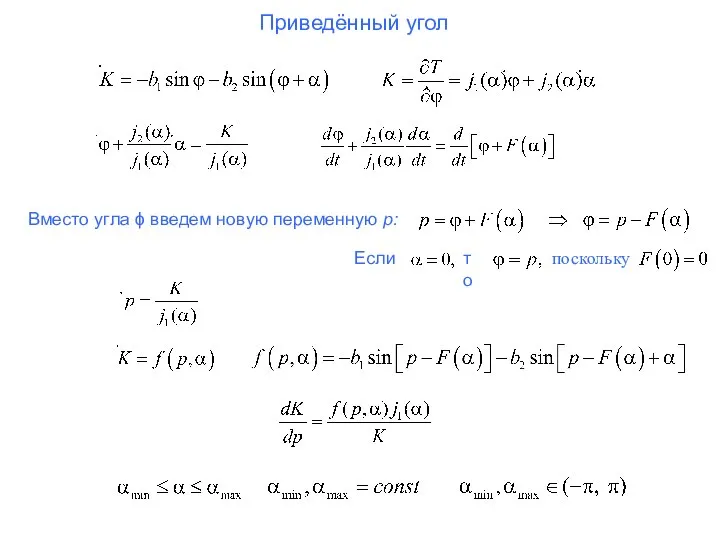
- 9. Вместо угла ϕ введем новую переменную p: Приведённый угол Если то поскольку
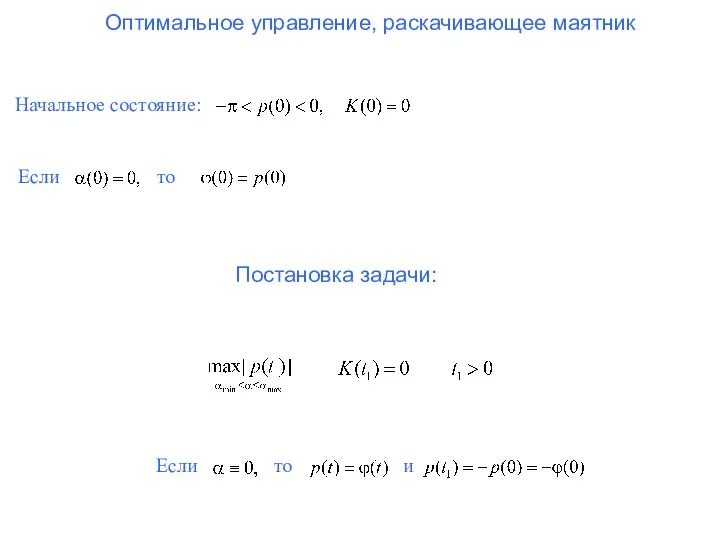
- 10. Оптимальное управление, раскачивающее маятник Начальное состояние: Если то Постановка задачи: Если то и
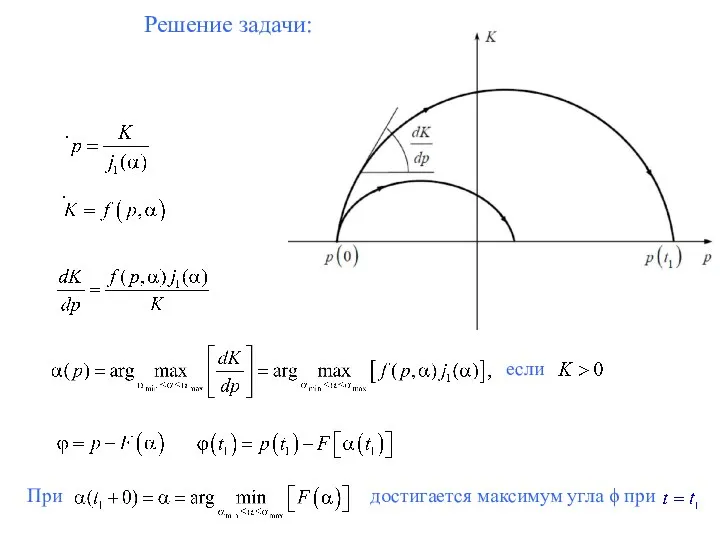
- 11. Решение задачи: если При достигается максимум угла ϕ при
- 13. Скачать презентацию
Слайд 2Двойной маятник:
оптимальное управление раскачиванием и торможением
Лекция 1
Гимнаст раскачивается на перекладине,
Двойной маятник:
оптимальное управление раскачиванием и торможением
Лекция 1
Гимнаст раскачивается на перекладине,
Слайд 3Другой пример
Другой пример
Слайд 4Уравнения движения двойного маятника
Уравнения движения двойного маятника
Слайд 5Кинетическая энергия:
Потенциальная энергия:
Обобщенная работа:
Уравнения Лагранжа:
- момент инерции жесткого двухзвенника
Кинетическая энергия:
Потенциальная энергия:
Обобщенная работа:
Уравнения Лагранжа:
- момент инерции жесткого двухзвенника
Слайд 6- теорема Штейнера
- теорема Штейнера
Слайд 7Вычисление интеграла
Вычисление интеграла

Слайд 9Вместо угла ϕ введем новую переменную p:
Приведённый угол
Если
то
поскольку
Вместо угла ϕ введем новую переменную p:
Приведённый угол
Если
то
поскольку
Слайд 10Оптимальное управление, раскачивающее маятник
Начальное состояние:
Если
то
Постановка задачи:
Если
то
и
Оптимальное управление, раскачивающее маятник
Начальное состояние:
Если
то
Постановка задачи:
Если
то
и
Слайд 11Решение задачи:
если
При
достигается максимум угла ϕ при
Решение задачи:
если
При
достигается максимум угла ϕ при
 Расчет сопротивления проводника. Удельное сопротивление. 24.02.2012г.
Расчет сопротивления проводника. Удельное сопротивление. 24.02.2012г. Электромагнитные колебания
Электромагнитные колебания Электросмачивание. Вакуум
Электросмачивание. Вакуум Состав ядра атома. Энергия связи атомных ядер. Дефект масс
Состав ядра атома. Энергия связи атомных ядер. Дефект масс Закон сохранения энергии
Закон сохранения энергии Действие магнитного поля на проводник с током. Электрический двигатель
Действие магнитного поля на проводник с током. Электрический двигатель Масляная система. Часть 1
Масляная система. Часть 1 Исследование коэффициентов переноса жидкостей в молекулярных моделях Opls и Saft
Исследование коэффициентов переноса жидкостей в молекулярных моделях Opls и Saft Механика. Основы СТО
Механика. Основы СТО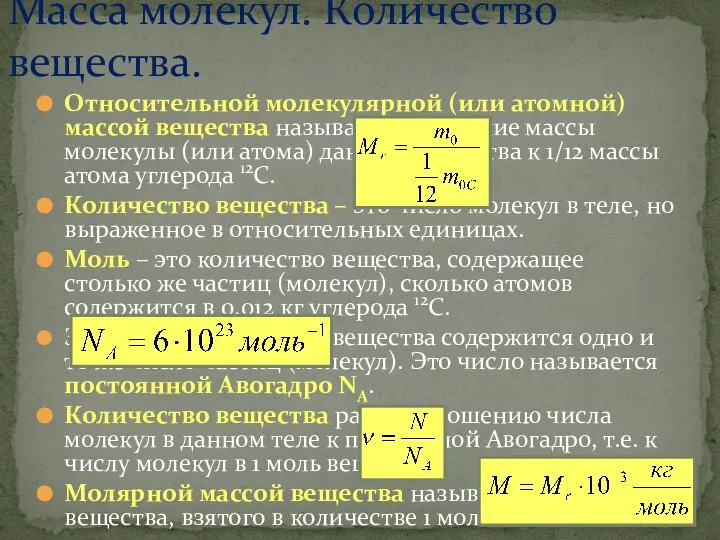 Масса молекул. Количество вещества
Масса молекул. Количество вещества konspekt (1)
konspekt (1) Магнитная цепь
Магнитная цепь Физика в нашем доме. Принцип работы микроволновой (СВЧ) печи
Физика в нашем доме. Принцип работы микроволновой (СВЧ) печи Диамагнитик тарихы
Диамагнитик тарихы Материально-техническое обеспечение
Материально-техническое обеспечение Взаимодействие ионизирующего излучения с веществом
Взаимодействие ионизирующего излучения с веществом Процессы теплопередачи. Сложный теплообмен и теплопередача
Процессы теплопередачи. Сложный теплообмен и теплопередача Изучение нового вида теплопередачи
Изучение нового вида теплопередачи Объяснение физических явлений
Объяснение физических явлений Ворот-разновидность рычага
Ворот-разновидность рычага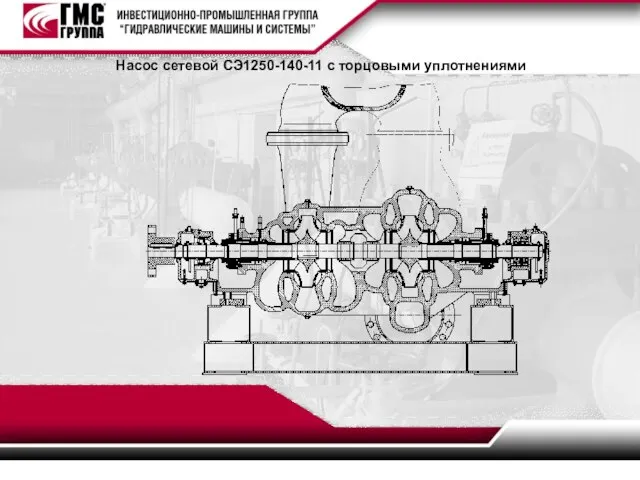 Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями
Насос сетевой СЭ1250-140-11 с торцовыми уплотнениями Электростатика. Контрольная работа
Электростатика. Контрольная работа Инновационные технологии в машиностроении. Лекция 1, 2. Общая характеристика машиностроительного производства
Инновационные технологии в машиностроении. Лекция 1, 2. Общая характеристика машиностроительного производства Пара сил и ее действие на тело
Пара сил и ее действие на тело Тепло- и массообменные процессы, протекающие при производстве осушенного воздуха
Тепло- и массообменные процессы, протекающие при производстве осушенного воздуха Изоляторы
Изоляторы Индукция поля прямого и кругового тока
Индукция поля прямого и кругового тока Презентация на тему Основные физические величины системы СИ
Презентация на тему Основные физические величины системы СИ