- Система движения тележек. Виды тележек

Содержание
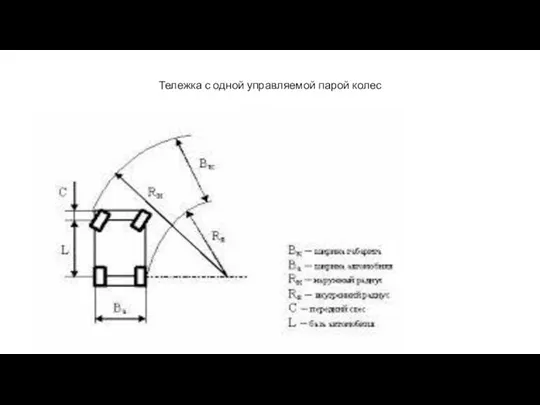
- 2. Тележка с одной управляемой парой колес
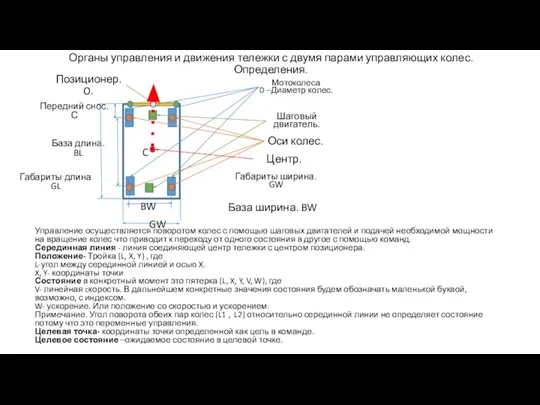
- 3. Управление осуществляется поворотом колес с помощью шаговых двигателей и подачей необходимой мощности на вращение колес что
- 4. Команда Go. Выполняет движение по прямой к целевой точке U ( с координатами x, y) до
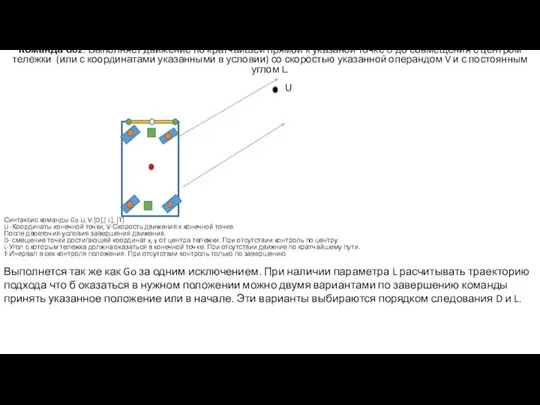
- 5. Команда Go2. Выполняет движение по кратчайшей прямой к указаной точке U до совмещения с центром тележки
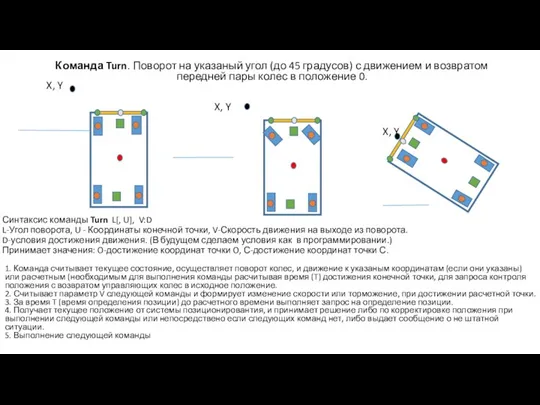
- 6. Команда Turn. Поворот на указаный угол (до 45 градусов) с движением и возвратом передней пары колес
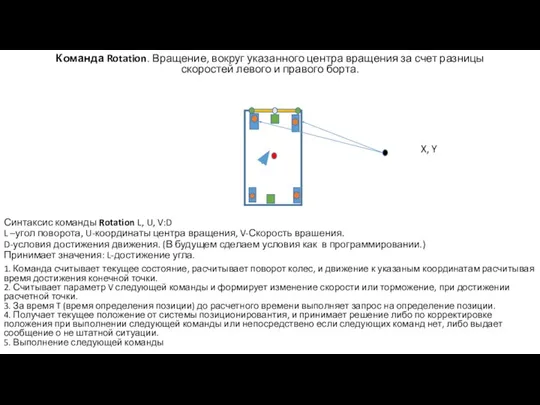
- 7. Команда Rotation. Вращение, вокруг указанного центра вращения за счет разницы скоростей левого и правого борта. Синтаксис
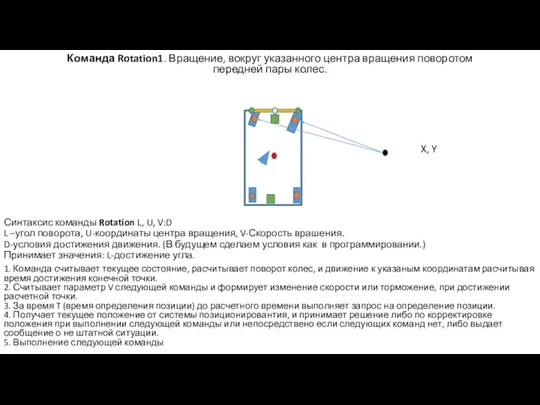
- 8. Команда Rotation1. Вращение, вокруг указанного центра вращения поворотом передней пары колес. Синтаксис команды Rotation L, U,
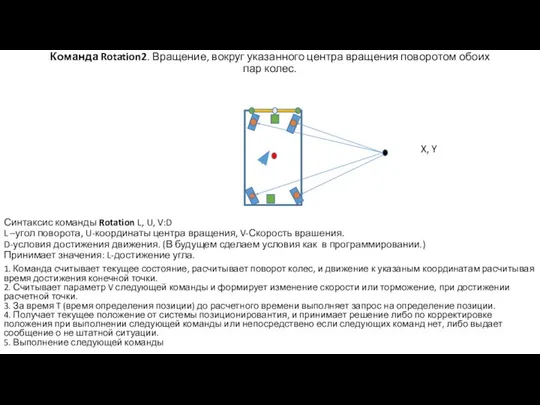
- 9. Команда Rotation2. Вращение, вокруг указанного центра вращения поворотом обоих пар колес. Синтаксис команды Rotation L, U,
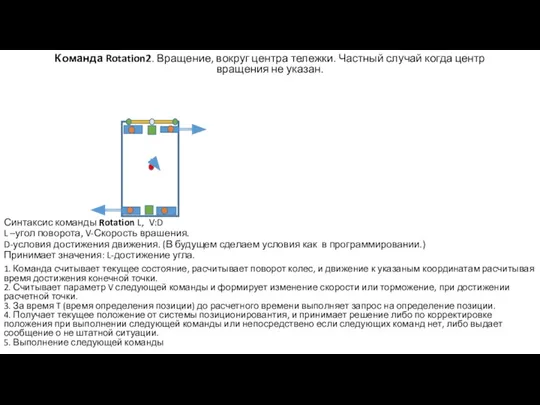
- 10. Команда Rotation2. Вращение, вокруг центра тележки. Частный случай когда центр вращения не указан. Синтаксис команды Rotation
- 11. Команда Back. Выполняет движение к указаной точке неподвижной парой колес вперед
- 13. Скачать презентацию
Слайд 3Управление осуществляется поворотом колес с помощью шаговых двигателей и подачей необходимой мощности
Управление осуществляется поворотом колес с помощью шаговых двигателей и подачей необходимой мощности
Слайд 4Команда Go. Выполняет движение по прямой к целевой точке U ( с
Команда Go. Выполняет движение по прямой к целевой точке U ( с

Слайд 5Команда Go2. Выполняет движение по кратчайшей прямой к указаной точке U до
Команда Go2. Выполняет движение по кратчайшей прямой к указаной точке U до
Слайд 6Команда Turn. Поворот на указаный угол (до 45 градусов) с движением и
Команда Turn. Поворот на указаный угол (до 45 градусов) с движением и
Слайд 7Команда Rotation. Вращение, вокруг указанного центра вращения за счет разницы скоростей левого
Команда Rotation. Вращение, вокруг указанного центра вращения за счет разницы скоростей левого
Слайд 8Команда Rotation1. Вращение, вокруг указанного центра вращения поворотом передней пары колес.
Синтаксис команды
Команда Rotation1. Вращение, вокруг указанного центра вращения поворотом передней пары колес.
Синтаксис команды
Слайд 9Команда Rotation2. Вращение, вокруг указанного центра вращения поворотом обоих пар колес.
Синтаксис команды
Команда Rotation2. Вращение, вокруг указанного центра вращения поворотом обоих пар колес.
Синтаксис команды
Слайд 10Команда Rotation2. Вращение, вокруг центра тележки. Частный случай когда центр вращения не
Команда Rotation2. Вращение, вокруг центра тележки. Частный случай когда центр вращения не
Слайд 11Команда Back. Выполняет движение к указаной точке неподвижной парой колес вперед
Команда Back. Выполняет движение к указаной точке неподвижной парой колес вперед

 Опыты дома
Опыты дома Элементы специальной теории относительности (СТО). Лекция 7
Элементы специальной теории относительности (СТО). Лекция 7 Техобслуживание
Техобслуживание Делимость электрического заряда. Электрон. Строение атома
Делимость электрического заряда. Электрон. Строение атома Ременные передачи
Ременные передачи Физико-математическая викторина для учащихся 7-8 классов
Физико-математическая викторина для учащихся 7-8 классов Презентация на тему Двигатель внутреннего сгорания: принципы
Презентация на тему Двигатель внутреннего сгорания: принципы  Физика ядра
Физика ядра Зависимость электрического сопротивления от температуры
Зависимость электрического сопротивления от температуры Расчет амплитудно-частотных характеристик фильтров
Расчет амплитудно-частотных характеристик фильтров Скорость движения 7 класс
Скорость движения 7 класс Ядерно-магнитный резонанс
Ядерно-магнитный резонанс Лазерные технологии
Лазерные технологии Некоторые физические термины
Некоторые физические термины Ложные воспоминания
Ложные воспоминания Необычные виды транспорта. Поезд на магнитной подушке
Необычные виды транспорта. Поезд на магнитной подушке Микроподводные движители. Виды микро-движителей
Микроподводные движители. Виды микро-движителей Организация участка по восстановлению коленчатых валов двигателя автомобиля ЗИЛ 5103 “Бычок” в ООО “Катран” в г. Смоленск
Организация участка по восстановлению коленчатых валов двигателя автомобиля ЗИЛ 5103 “Бычок” в ООО “Катран” в г. Смоленск Точность измерений и вычислений
Точность измерений и вычислений Сила - мера взаимодействия тел
Сила - мера взаимодействия тел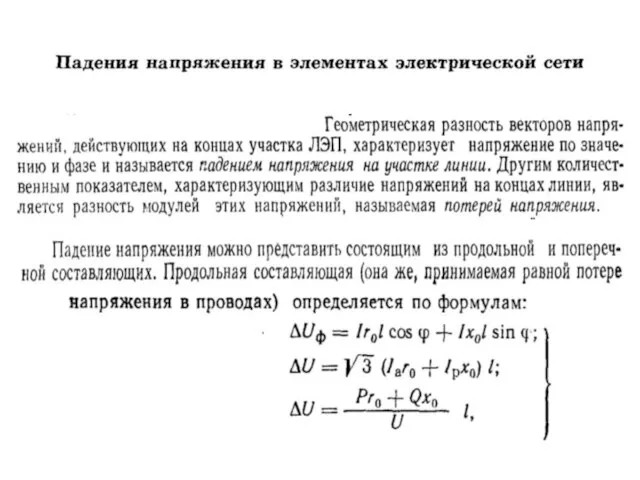 Потери напряжения в элементах электрической цепи
Потери напряжения в элементах электрической цепи Деятельностный подход в преподавании физики
Деятельностный подход в преподавании физики Примеры решения задач. Водородоподобные атомы. Оптические спектры излучения
Примеры решения задач. Водородоподобные атомы. Оптические спектры излучения Основы термодинамики
Основы термодинамики Зубчатые передачи
Зубчатые передачи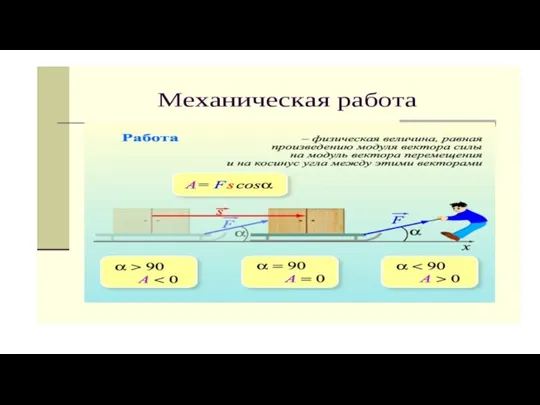 Механическая работа. Механическая мощность
Механическая работа. Механическая мощность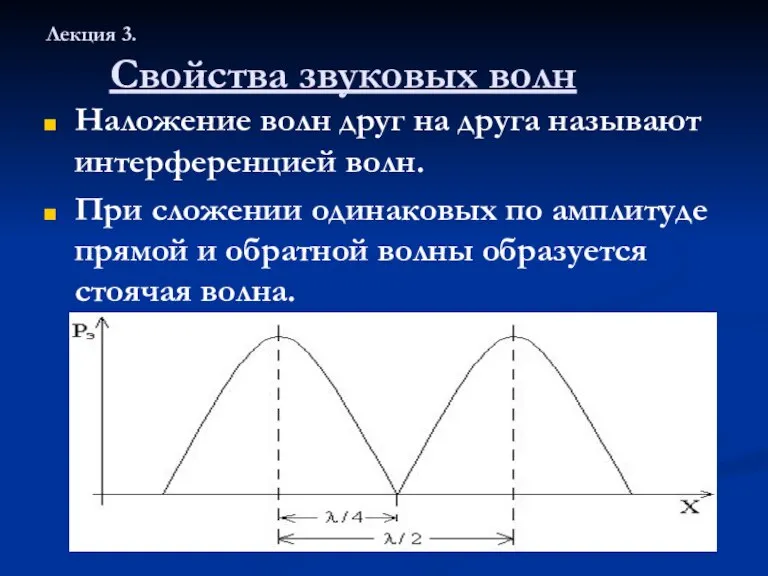 Свойства звуковых волн
Свойства звуковых волн Физика и познание мира
Физика и познание мира