Предмет механики. Аксиомы статики. Связи и реакции связей. Система сходящихся сил. Равнодействующая сходящихся сил
- Предмет механики. Аксиомы статики. Связи и реакции связей. Система сходящихся сил. Равнодействующая сходящихся сил

Содержание
- 2. Содержание Лекция 1. Введение. Основные понятия. Аксиомы статики. Связи и реакции связей. Лекция 2. Система сходящихся
- 3. Лекция 1 Введение Под названием “механика” объединяется ряд наук, изучающих механическое движение и механическое взаимодействие твердых
- 4. Лекция 1 (продолжение – 1.2) Теоретическая механика состоит из трех разделов: Статика – изучает условия относительного
- 5. Лекция 1 (продолжение – 1.3) Аксиомы статики (продолжение) Следствие из аксиомы присоединения – Кинематическое состояние тела
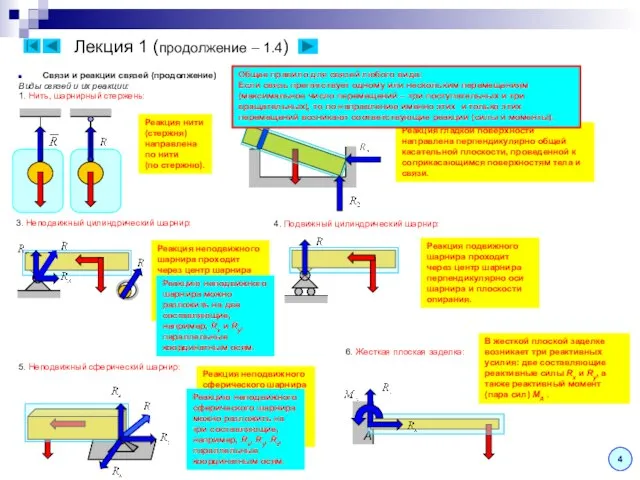
- 6. Лекция 1 (продолжение – 1.4) Связи и реакции связей (продолжение) Виды связей и их реакции: 1.
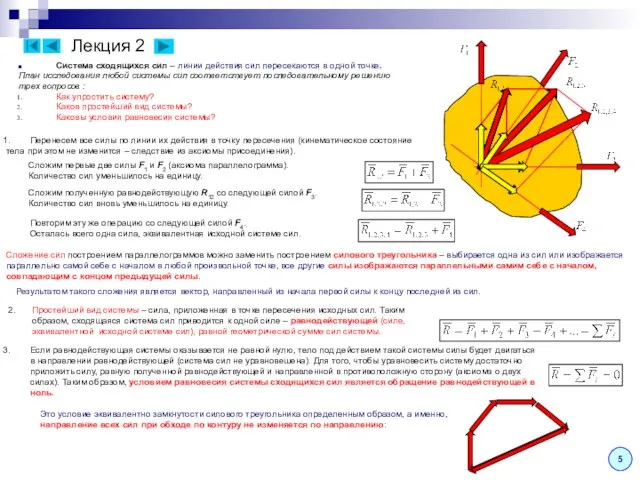
- 7. Система сходящихся сил – линии действия сил пересекаются в одной точке. План исследования любой системы сил
- 9. Скачать презентацию
Слайд 2Содержание
Лекция 1. Введение. Основные понятия. Аксиомы статики. Связи и реакции связей.
Лекция 2.
Содержание
Лекция 1. Введение. Основные понятия. Аксиомы статики. Связи и реакции связей.
Лекция 2.
Слайд 3Лекция 1
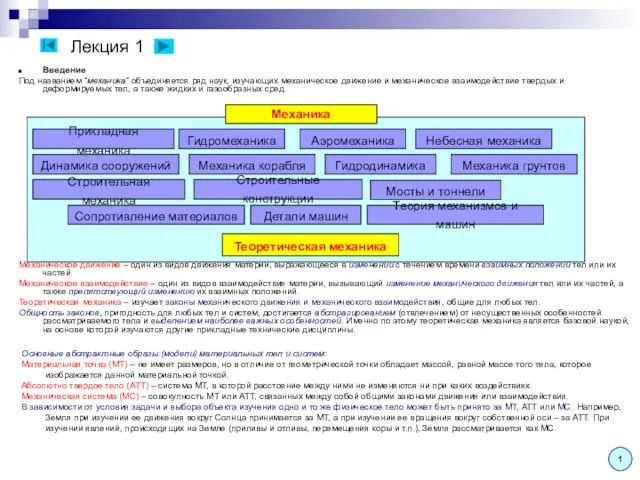
Введение
Под названием “механика” объединяется ряд наук, изучающих механическое движение и механическое
Лекция 1
Введение
Под названием “механика” объединяется ряд наук, изучающих механическое движение и механическое
Слайд 4Лекция 1 (продолжение – 1.2)
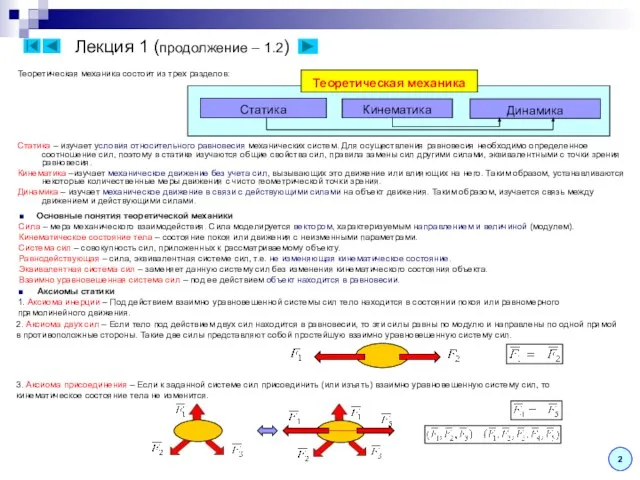
Теоретическая механика состоит из трех разделов:
Статика – изучает
Лекция 1 (продолжение – 1.2)
Теоретическая механика состоит из трех разделов:
Статика – изучает
Слайд 5Лекция 1 (продолжение – 1.3)
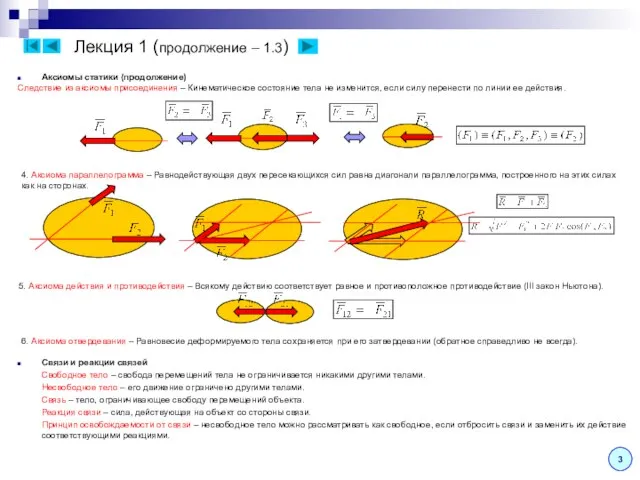
Аксиомы статики (продолжение)
Следствие из аксиомы присоединения – Кинематическое
Лекция 1 (продолжение – 1.3)
Аксиомы статики (продолжение)
Следствие из аксиомы присоединения – Кинематическое
Слайд 6Лекция 1 (продолжение – 1.4)
Связи и реакции связей (продолжение)
Виды связей и их
Лекция 1 (продолжение – 1.4)
Связи и реакции связей (продолжение)
Виды связей и их
Слайд 7Система сходящихся сил – линии действия сил пересекаются в одной точке.
План
Система сходящихся сил – линии действия сил пересекаются в одной точке.
План
План
 Магнитное взаимодействие Изучение свойств магнита Учитель И.А. Попова
Магнитное взаимодействие Изучение свойств магнита Учитель И.А. Попова Презентация на тему Магнитное взаимодействие. Изучение свойств магнита
Презентация на тему Магнитное взаимодействие. Изучение свойств магнита  Классификация магнитных материалов специального назначения. (Лекция 8)
Классификация магнитных материалов специального назначения. (Лекция 8) Винтовые конвейеры
Винтовые конвейеры Леонардо да Винчи, его вклад в развитие механики
Леонардо да Винчи, его вклад в развитие механики Энергия топлива. Удельная теплота сгорания
Энергия топлива. Удельная теплота сгорания Понятие об энтропии
Понятие об энтропии Спінтарископ
Спінтарископ Статика. Условия равновесия тел
Статика. Условия равновесия тел Электрический ток
Электрический ток Презентация на тему Ядерная энергетика
Презентация на тему Ядерная энергетика  Низковольтное электрооборудование ТМ
Низковольтное электрооборудование ТМ Равномерное движение. Понятие о механическом движении
Равномерное движение. Понятие о механическом движении Электрооборудование троллейбуса
Электрооборудование троллейбуса Автосцепное устройство
Автосцепное устройство Теория ядерных реакторов. Семинар к курсовому проекту по спецкурсу № 2
Теория ядерных реакторов. Семинар к курсовому проекту по спецкурсу № 2 Виртуальные лаборатории на уроках физики
Виртуальные лаборатории на уроках физики Презентация на тему Закон сохранения и превращения энергии
Презентация на тему Закон сохранения и превращения энергии  Ускорение свободного падения на Земле идругих небесных телах
Ускорение свободного падения на Земле идругих небесных телах Плавание тел в жидкости
Плавание тел в жидкости Масса. Измерение массы
Масса. Измерение массы Циклы углов и первый импульс как пророк. Циклы по цене и цели
Циклы углов и первый импульс как пророк. Циклы по цене и цели Развитие двигателя внутреннего сгорания
Развитие двигателя внутреннего сгорания История создания швейной машины
История создания швейной машины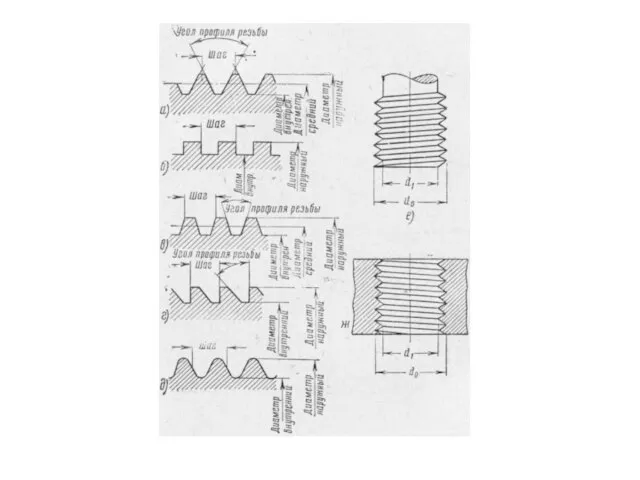 Технология обработки на металлорежущих станках. Элементы резьбы
Технология обработки на металлорежущих станках. Элементы резьбы Отражение света
Отражение света Своя игра. 7 класс
Своя игра. 7 класс Решение качественных и расчетных задач по физике
Решение качественных и расчетных задач по физике