- Теоретические основы контроля и анализа функционирования систем автоматического управления

Содержание
- 2. Теория автоматического управления (ТАУ) — научная дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При
- 3. Автоматика – наука о технических системах, действующих без непосредственного участия человека и осуществляющих контроль, защиту, управление
- 4. Техника (τέχνη – мастерство, умение) – совокупность неживых объектов окружающего мира, созданных человеком. К указанным объектам
- 5. Техническая система – совокупность элементов (устройств и обслуживающего персонала), объединенных связами и вступающих в определенные отношения
- 6. Система автоматического управления (САУ) включает в себя объект управления и устройство управления. Управление — процесс подаваемый
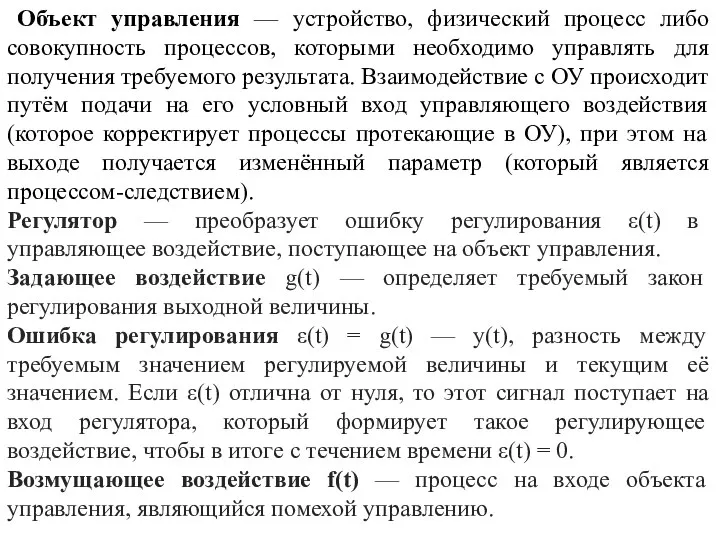
- 7. Объект управления — устройство, физический процесс либо совокупность процессов, которыми необходимо управлять для получения требуемого результата.
- 8. Управляемыми величинами (вектор размерности m) называются физические величины, которые необходимо изменять по заданному закону или поддерживать
- 9. Системы автоматического управления: Разомкнутые: система программного управления. УУ выдает управляющее воздействие, не получая информации о состоянии
- 10. Функциональные схемы Функциональная схема элемента — схема системы автоматического регулирования и управления, составленная по функции, которую
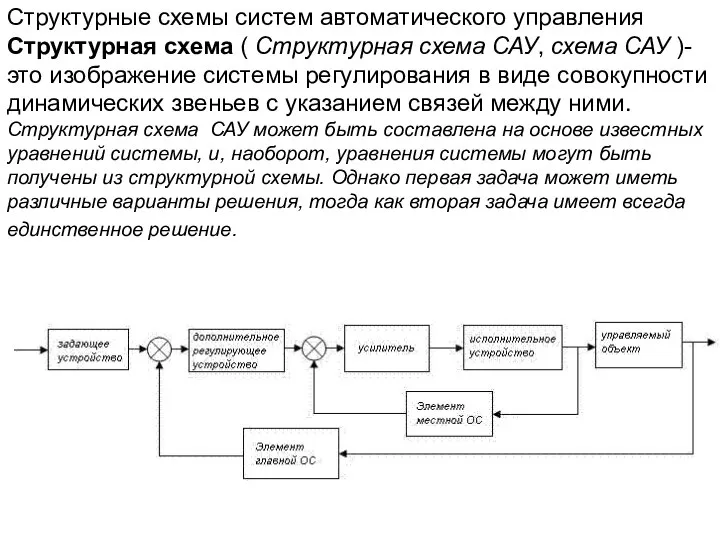
- 11. Структурные схемы систем автоматического управления Структурная схема ( Структурная схема САУ, схема САУ )- это изображение
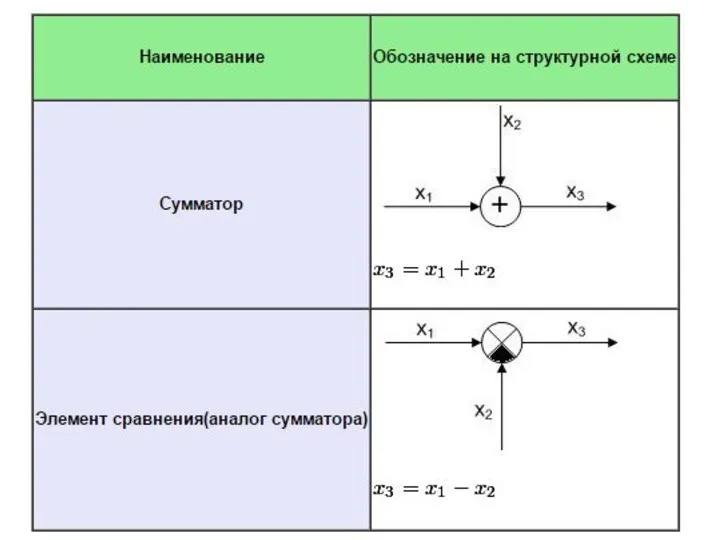
- 12. Элементы структурных схем Базовые элементы для построения структурной схемы САУ.
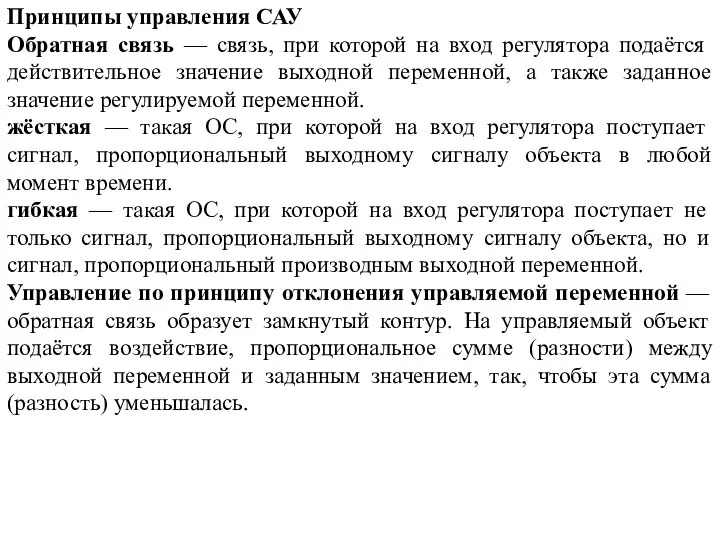
- 14. Принципы управления САУ Обратная связь — связь, при которой на вход регулятора подаётся действительное значение выходной
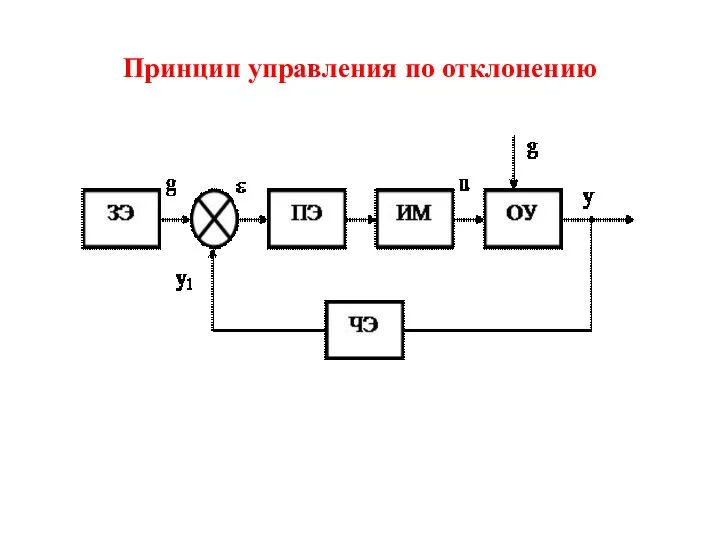
- 16. Принцип управления по отклонению
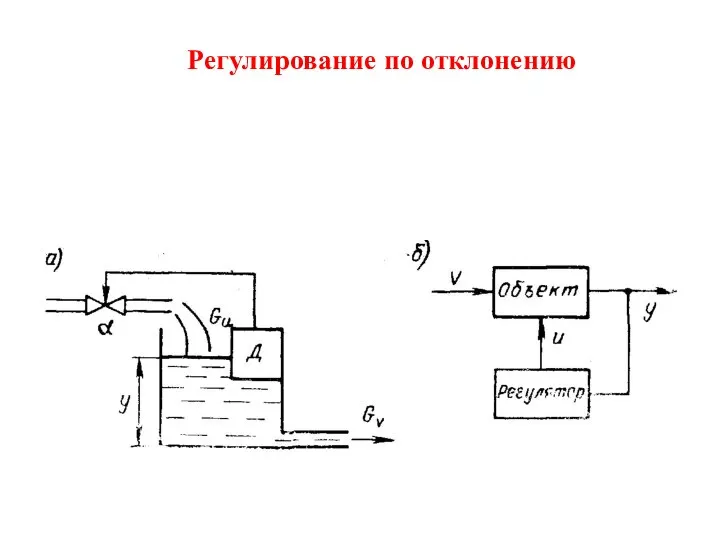
- 17. Регулирование по отклонению
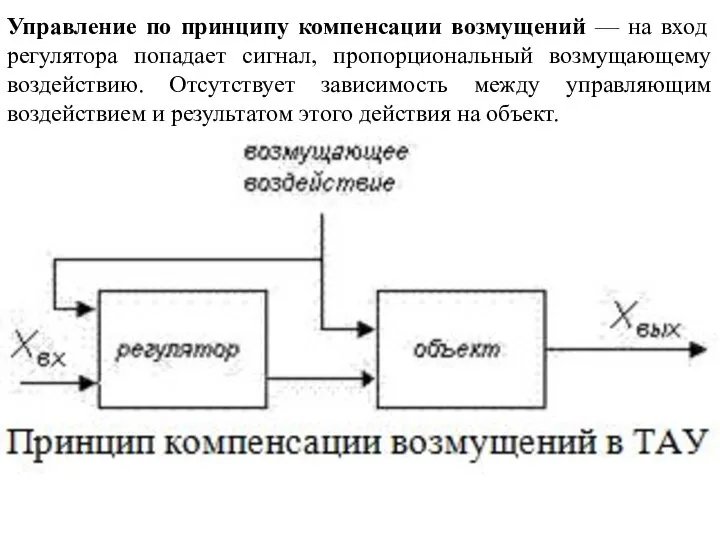
- 18. Управление по принципу компенсации возмущений — на вход регулятора попадает сигнал, пропорциональный возмущающему воздействию. Отсутствует зависимость
- 19. Принцип управления по возмущению
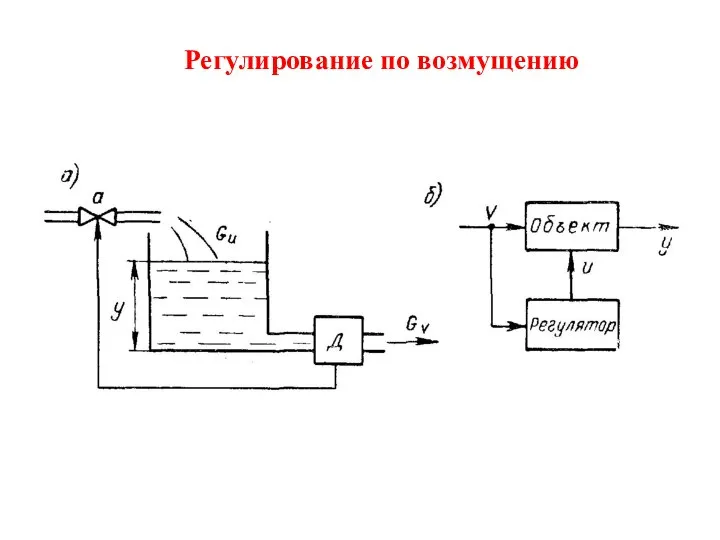
- 20. Регулирование по возмущению
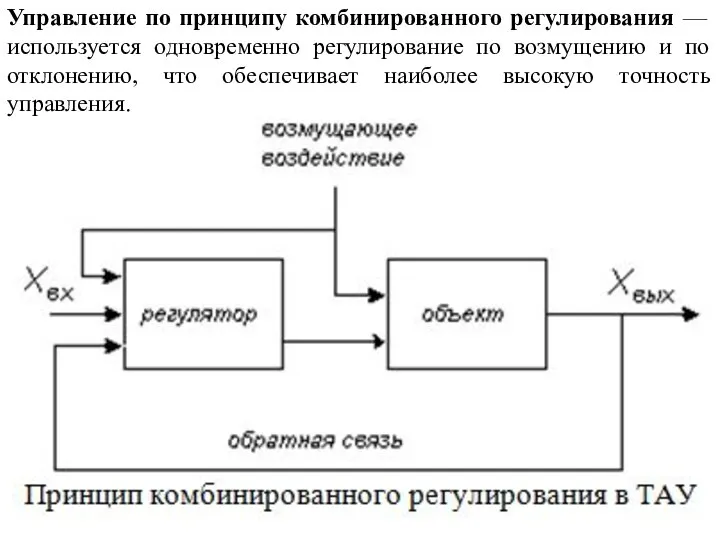
- 21. Управление по принципу комбинированного регулирования — используется одновременно регулирование по возмущению и по отклонению, что обеспечивает
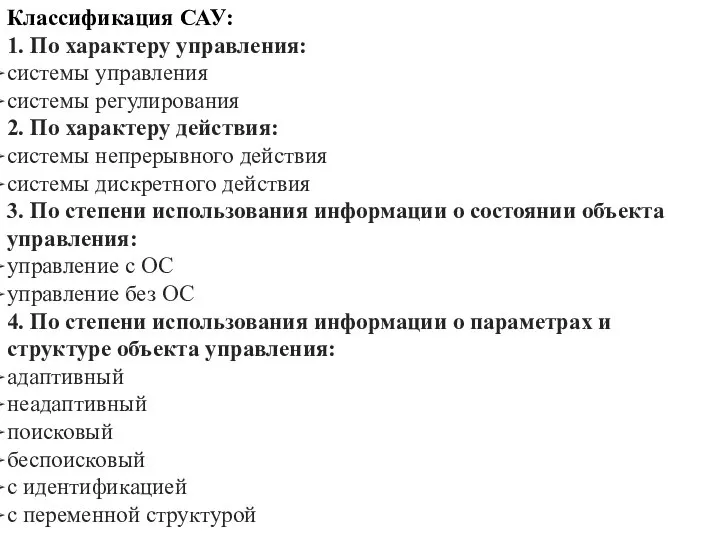
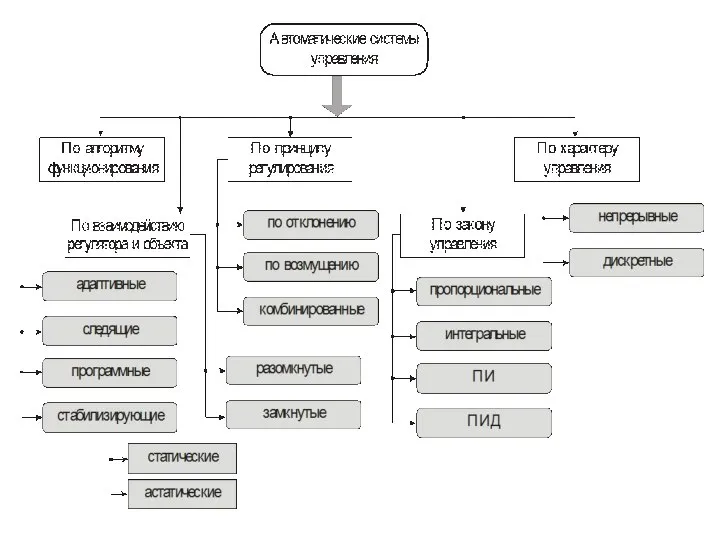
- 22. Классификация САУ: 1. По характеру управления: системы управления системы регулирования 2. По характеру действия: системы непрерывного
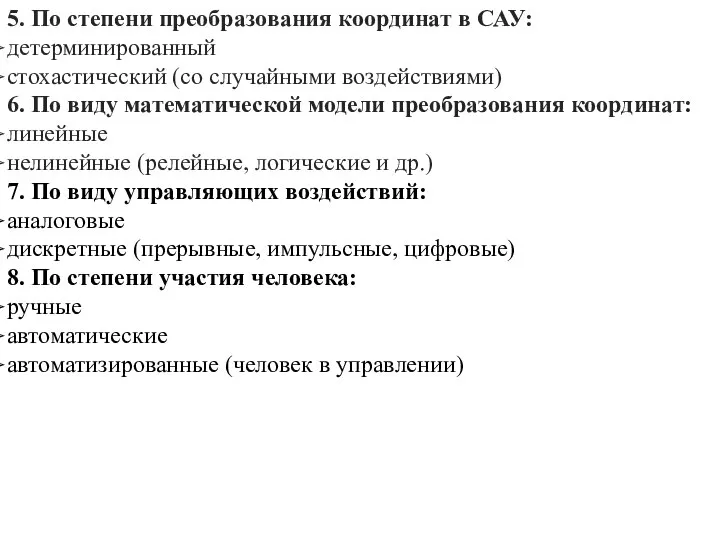
- 23. 5. По степени преобразования координат в САУ: детерминированный стохастический (со случайными воздействиями) 6. По виду математической
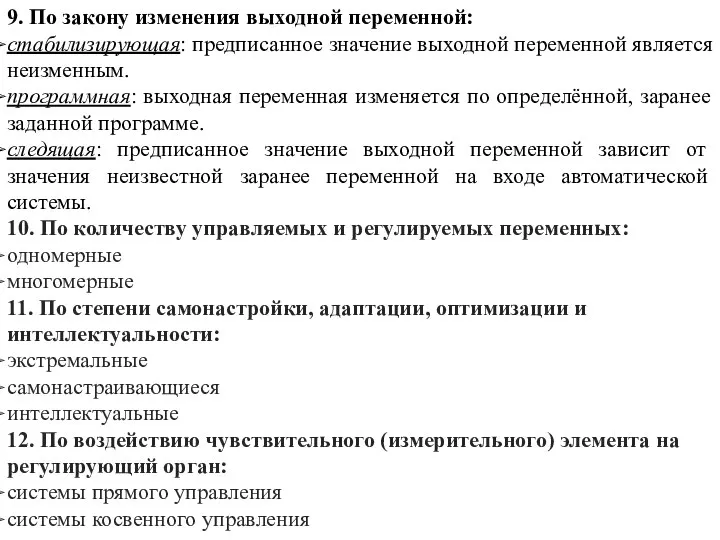
- 24. 9. По закону изменения выходной переменной: стабилизирующая: предписанное значение выходной переменной является неизменным. программная: выходная переменная
- 26. Адаптивные системы Адаптивные системы – могут изменять свои параметры и структуру. Адаптивные системы с изменением значений
- 27. Следящая система Следящая система предназначена для изменения управляемой величины в зависимости от значения (или в соответствии
- 28. Программные системы Программные системы предназначены для изменения регулируемой величины g по известному закону в функции времени
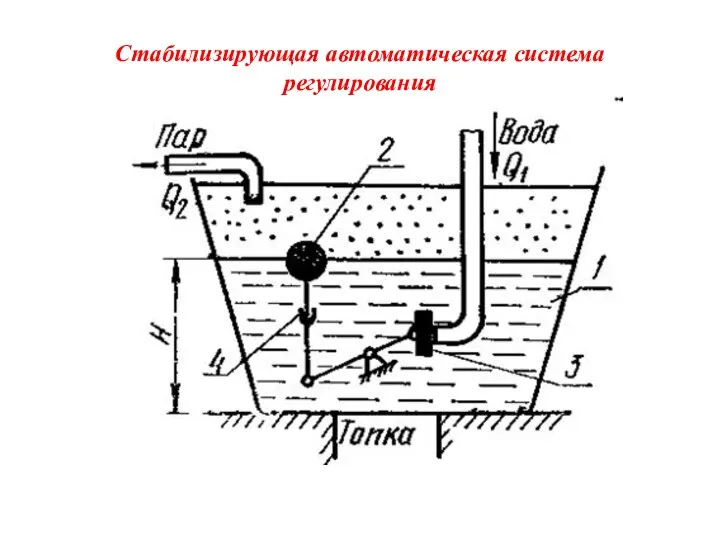
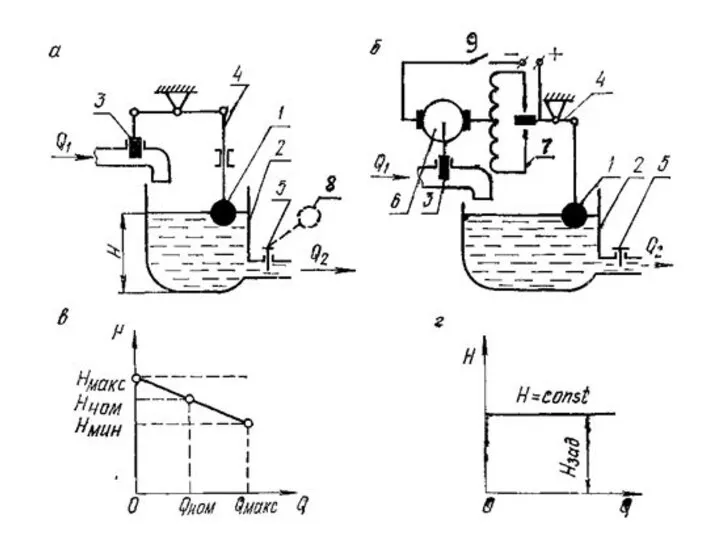
- 29. Стабилизирующая автоматическая система регулирования
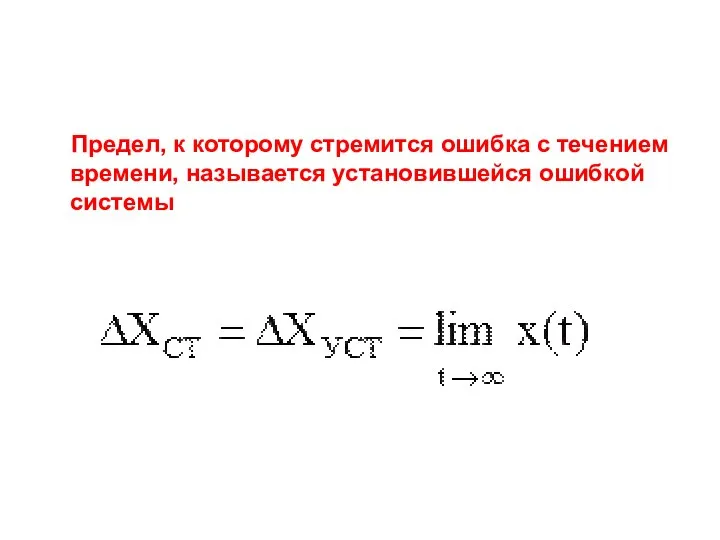
- 30. Предел, к которому стремится ошибка с течением времени, называется установившейся ошибкой системы
- 31. Если все внешние воздействия (задающие и возмущающие) с течением времени стремятся к постоянным значениям, установившаяся ошибка
- 33. Система называется астатической по отношению к данному внешнему воздействию, если составляющая статической ошибки, обусловленная им, равна
- 34. Законы регулирования Законом регулирования называется зависимость между управляющим воздействием и отклонением действительного значения регулируемого параметра от
- 35. Пропорциональный закон Пропорциональный закон (П) регулирования характеризуется пропорциональной зависимостью между выходной и входной координатой
- 36. Интегральный закон Интегральный закон (И) регулирования устанавливает пропорциональную зависимость между скоростью изменения регулирующего воздействия и ошибкой.
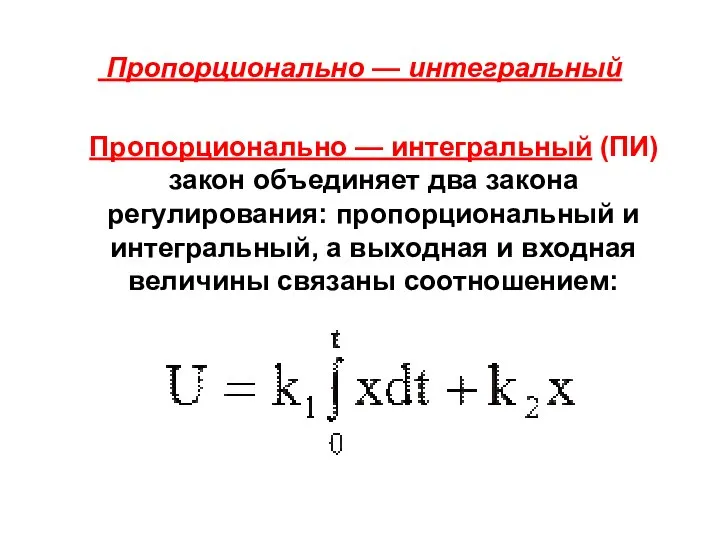
- 37. Пропорционально — интегральный Пропорционально — интегральный (ПИ) закон объединяет два закона регулирования: пропорциональный и интегральный, а
- 38. Пропорционально — интегральный Регулирование по пропорционально — интегральному закону называется изодромным регулированием и сочетает в себе
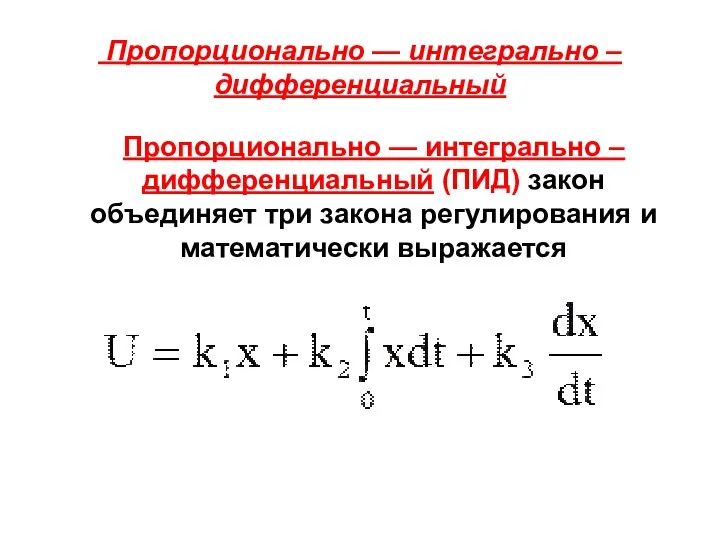
- 39. Пропорционально — интегрально – дифференциальный Пропорционально — интегрально – дифференциальный (ПИД) закон объединяет три закона регулирования
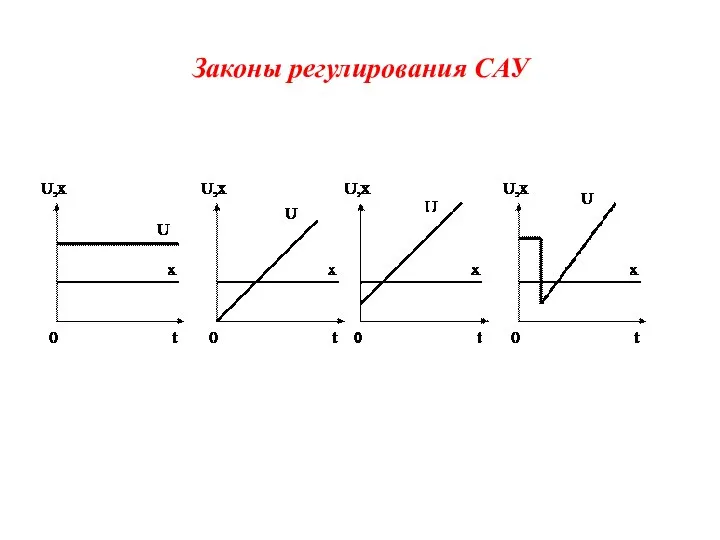
- 40. Законы регулирования САУ
- 41. Непрерывные системы Непрерывные системы – это системы, у которых в каждом звене непрерывному изменению входной величины
- 42. Дискретные системы Дискретные системы – это системы, у которых хотя бы в одном звене при непрерывном
- 43. Квантование Три вида квантования: Квантование по уровню соответствует фиксации дискретных уровней сигнала в момент пересечения кривой
- 44. Квантование
- 46. Скачать презентацию
Слайд 2Теория автоматического управления (ТАУ) — научная дисциплина, изучающая процессы автоматического управления объектами
Теория автоматического управления (ТАУ) — научная дисциплина, изучающая процессы автоматического управления объектами
Слайд 3Автоматика – наука о технических системах, действующих без непосредственного участия человека и
Автоматика – наука о технических системах, действующих без непосредственного участия человека и
Слайд 4Техника (τέχνη – мастерство, умение) – совокупность неживых объектов окружающего мира, созданных человеком. К
Техника (τέχνη – мастерство, умение) – совокупность неживых объектов окружающего мира, созданных человеком. К
Слайд 5Техническая система – совокупность элементов (устройств и обслуживающего персонала), объединенных связами и
Техническая система – совокупность элементов (устройств и обслуживающего персонала), объединенных связами и

Слайд 6Система автоматического управления (САУ) включает в себя объект управления и устройство управления.
Управление
Система автоматического управления (САУ) включает в себя объект управления и устройство управления.
Управление
Слайд 7 Объект управления — устройство, физический процесс либо совокупность процессов, которыми необходимо
Объект управления — устройство, физический процесс либо совокупность процессов, которыми необходимо
Слайд 8Управляемыми величинами (вектор размерности m) называются физические величины, которые необходимо изменять по
Управляемыми величинами (вектор размерности m) называются физические величины, которые необходимо изменять по
Слайд 9Системы автоматического управления:
Разомкнутые:
система программного управления. УУ выдает управляющее воздействие, не получая информации
Системы автоматического управления:
Разомкнутые:
система программного управления. УУ выдает управляющее воздействие, не получая информации
Слайд 10Функциональные схемы
Функциональная схема элемента — схема системы автоматического регулирования и управления, составленная
Функциональные схемы
Функциональная схема элемента — схема системы автоматического регулирования и управления, составленная
Слайд 11Структурные схемы систем автоматического управления
Структурная схема ( Структурная схема САУ, схема САУ )- это изображение системы
Структурные схемы систем автоматического управления
Структурная схема ( Структурная схема САУ, схема САУ )- это изображение системы
Слайд 12Элементы структурных схем
Базовые элементы для построения структурной схемы САУ.
Элементы структурных схем
Базовые элементы для построения структурной схемы САУ.

Слайд 14Принципы управления САУ
Обратная связь — связь, при которой на вход регулятора подаётся
Принципы управления САУ
Обратная связь — связь, при которой на вход регулятора подаётся
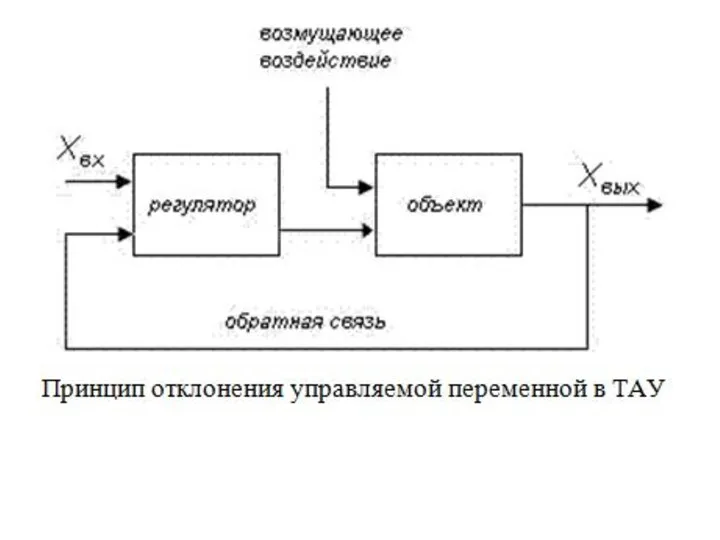
Слайд 16Принцип управления по отклонению
Принцип управления по отклонению
Слайд 17Регулирование по отклонению
Регулирование по отклонению
Слайд 18Управление по принципу компенсации возмущений — на вход регулятора попадает сигнал, пропорциональный
Управление по принципу компенсации возмущений — на вход регулятора попадает сигнал, пропорциональный
Слайд 19Принцип управления по возмущению
Принцип управления по возмущению

Слайд 20Регулирование по возмущению
Регулирование по возмущению
Слайд 21Управление по принципу комбинированного регулирования — используется одновременно регулирование по возмущению и
Управление по принципу комбинированного регулирования — используется одновременно регулирование по возмущению и
Слайд 22Классификация САУ:
1. По характеру управления:
системы управления
системы регулирования
2. По характеру действия:
системы непрерывного действия
системы
Классификация САУ:
1. По характеру управления:
системы управления
системы регулирования
2. По характеру действия:
системы непрерывного действия
системы
Слайд 235. По степени преобразования координат в САУ:
детерминированный
стохастический (со случайными воздействиями)
6. По виду
5. По степени преобразования координат в САУ:
детерминированный
стохастический (со случайными воздействиями)
6. По виду
Слайд 249. По закону изменения выходной переменной:
стабилизирующая: предписанное значение выходной переменной является неизменным.
программная:
9. По закону изменения выходной переменной:
стабилизирующая: предписанное значение выходной переменной является неизменным.
программная:
Слайд 26Адаптивные системы
Адаптивные системы – могут изменять свои параметры и структуру.
Адаптивные системы
Адаптивные системы
Адаптивные системы – могут изменять свои параметры и структуру.
Адаптивные системы
Слайд 27Следящая система
Следящая система предназначена для изменения управляемой величины в зависимости от значения
Следящая система
Следящая система предназначена для изменения управляемой величины в зависимости от значения
Слайд 28Программные системы
Программные системы предназначены для изменения регулируемой величины g по известному закону
Программные системы
Программные системы предназначены для изменения регулируемой величины g по известному закону
Слайд 29Стабилизирующая автоматическая система регулирования
Стабилизирующая автоматическая система регулирования
Слайд 30Предел, к которому стремится ошибка с течением времени, называется установившейся ошибкой системы
Предел, к которому стремится ошибка с течением времени, называется установившейся ошибкой системы
Слайд 31Если все внешние воздействия (задающие и возмущающие) с течением времени стремятся к
Если все внешние воздействия (задающие и возмущающие) с течением времени стремятся к
Слайд 33Система называется астатической по отношению к данному внешнему воздействию, если составляющая статической
Система называется астатической по отношению к данному внешнему воздействию, если составляющая статической
Слайд 34Законы регулирования
Законом регулирования называется зависимость между управляющим воздействием и отклонением действительного
Законы регулирования
Законом регулирования называется зависимость между управляющим воздействием и отклонением действительного
Слайд 35Пропорциональный закон
Пропорциональный закон (П) регулирования характеризуется пропорциональной зависимостью между выходной и входной
Пропорциональный закон
Пропорциональный закон (П) регулирования характеризуется пропорциональной зависимостью между выходной и входной
Слайд 36Интегральный закон
Интегральный закон (И) регулирования устанавливает пропорциональную зависимость между скоростью изменения регулирующего
Интегральный закон
Интегральный закон (И) регулирования устанавливает пропорциональную зависимость между скоростью изменения регулирующего
Слайд 37 Пропорционально — интегральный
Пропорционально — интегральный (ПИ) закон объединяет два закона регулирования: пропорциональный
Пропорционально — интегральный
Пропорционально — интегральный (ПИ) закон объединяет два закона регулирования: пропорциональный
Слайд 38 Пропорционально — интегральный
Регулирование по пропорционально — интегральному закону называется изодромным регулированием
Пропорционально — интегральный
Регулирование по пропорционально — интегральному закону называется изодромным регулированием
Слайд 39 Пропорционально — интегрально – дифференциальный
Пропорционально — интегрально – дифференциальный (ПИД) закон объединяет
Пропорционально — интегрально – дифференциальный
Пропорционально — интегрально – дифференциальный (ПИД) закон объединяет
Слайд 40Законы регулирования САУ
Законы регулирования САУ
Слайд 41Непрерывные системы
Непрерывные системы – это системы, у которых в каждом звене непрерывному
Непрерывные системы
Непрерывные системы – это системы, у которых в каждом звене непрерывному
Слайд 42Дискретные системы
Дискретные системы – это системы, у которых хотя бы в
Дискретные системы
Дискретные системы – это системы, у которых хотя бы в
Слайд 43Квантование
Три вида квантования:
Квантование по уровню соответствует фиксации дискретных уровней сигнала в
Квантование
Три вида квантования:
Квантование по уровню соответствует фиксации дискретных уровней сигнала в
Слайд 44Квантование
Квантование

 lektsia
lektsia Расчет сопротивления проводника. Удельное сопротивление. 24.02.2012г.
Расчет сопротивления проводника. Удельное сопротивление. 24.02.2012г. Osnovy_AU
Osnovy_AU Взаимодействие тел
Взаимодействие тел Статические характеристики элементов автоматики
Статические характеристики элементов автоматики Физическое явление. Оценка ответов учащихся
Физическое явление. Оценка ответов учащихся Оптика
Оптика Электрические нагрузки. Графики электрических нагрузок. Режимы СЭС. Тема 2.1
Электрические нагрузки. Графики электрических нагрузок. Режимы СЭС. Тема 2.1 Солнечная энергия
Солнечная энергия Гидравлическое устройство управления шарнирно-сочленённого самосвала
Гидравлическое устройство управления шарнирно-сочленённого самосвала Физические основы микроэлектроники. Радиоматериалы и радиокомпоненты
Физические основы микроэлектроники. Радиоматериалы и радиокомпоненты Последовательное соединение
Последовательное соединение Архимедова сила
Архимедова сила Муфты приводов. Виды муфт
Муфты приводов. Виды муфт Структура и оптические свойства наночастиц, полученных импульсной лазерной абляцией меди в газовой среде
Структура и оптические свойства наночастиц, полученных импульсной лазерной абляцией меди в газовой среде Определение реакций связей твердого тела
Определение реакций связей твердого тела Источники света
Источники света Стабильность градуировочных графиков, их роль в оценке качества количественного химического анализа
Стабильность градуировочных графиков, их роль в оценке качества количественного химического анализа Виртуальный лабораторный комплекс по Молекулярной физике, Теплоте и Основам Термодинамики
Виртуальный лабораторный комплекс по Молекулярной физике, Теплоте и Основам Термодинамики Формулы для расчета рем передачи
Формулы для расчета рем передачи Решение задач по теме Прямолинейное равноускоренное движение
Решение задач по теме Прямолинейное равноускоренное движение Периодическое движение. Вращение. Колебание
Периодическое движение. Вращение. Колебание Закон сохранения импульса
Закон сохранения импульса Инерция (7 класс)
Инерция (7 класс) Dīzeļlokomotīvju bremžu iekārtu shēmas
Dīzeļlokomotīvju bremžu iekārtu shēmas Основные понятия, определения и аксиомы механики
Основные понятия, определения и аксиомы механики Всесвітнє тяжіння тіл
Всесвітнє тяжіння тіл Тепловое расширение тел
Тепловое расширение тел