- Интеллектуальные системы. Поиск в пространстве состояний

Содержание
- 2. Тема 2. Поиск в пространстве состояний
- 3. Поиск в пространстве состояний (англ. state space search) — группа методов, предназначенных для решения задач искусственного
- 4. 1 Агенты, решающие задачи
- 5. Первым шагом в решении задачи является формулировка цели с учётом текущей ситуации и показателей производительности агента.
- 6. Формулировка задачи представляет собой процесс определения того, какие действия и состояния следует рассматривать с учётом некоторой
- 7. Описанный процесс определения такой последовательности называется поиском. Любой алгоритм поиска принимает в качестве входных данных некоторую
- 8. Задача формально определяется с помощью следующих четырёх компонентов: Начальное состояние, в котором агент приступает к работе.
- 10. Путём в пространстве состояний является последовательность состояний, соединённых последовательностью действий.
- 11. Проверка цели позволяет определить, является ли данное конкретное состояние целевым состоянием.
- 12. Функция стоимости пути назначает числовое значение стоимости каждого пути.
- 13. Решением задачи является путь от начального состояния до целевого состояния. Качество решения измеряется функцией стоимости пути,
- 14. Примеры задач
- 15. Наиболее известные примеры решения задач подразделяются на два типа: упрощенные и реальные задачи.
- 16. Упрощенные задачи предназначены для иллюстрации или проверки различных методов решения задач. Реальные задачи, которые действительно требуются
- 17. Примеры упрощенных задач
- 18. Задачи со скользящими фишками часто используются в искусственном интеллекте для проверки новых алгоритмов поиска. Известно, что
- 19. Задачи относятся к классу недетерминированных полиномиальных задач (NP-классу, сокращение от Nondeterministic Polynomial), если существует алгоритм, позволяющий
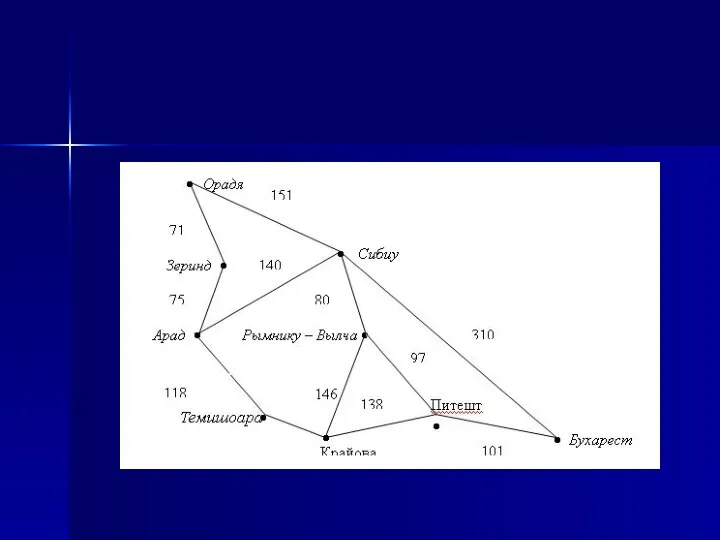
- 20. Примеры реальных задач Одними из наиболее распространённых являются задачи поиска маршрута в терминах заданных местонахождений и
- 21. В задачах автоматического упорядочения сборки сложных объектов роботом цель состоит в определении последовательности, в которой должны
- 22. Поиск решений
- 23. Сформулировав определённые задачи, необходимо найти их решения. Такая цель достигается посредством поиска в пространстве состояний.
- 24. Порядок, в котором происходит развёртывание состояний, определяется стратегией поиска.
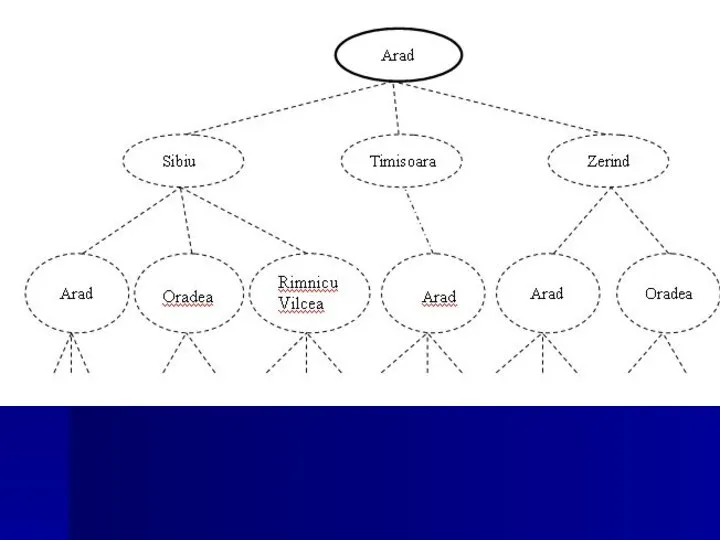
- 25. Корнем этого дерева поиска является поисковый узел, соответствующий начальному состоянию Первый этап состоит в проверке того,
- 26. Развёртывание текущего состояния приводит к формированию его преемника - нового множества состояний
- 27. Суть поиска состоит в том, что пока проверяется один вариант, другие откладываются в сторону на тот
- 28. Узлы представляют собой структуры данных, применяемых при построении дерева поиска, а состояние соответствует конфигурации мира.
- 31. Каждый узел имеет родительский узел, содержит данные о состоянии и имеет различные вспомогательные поля.
- 32. Структура данных может включать в себя: State - соответствующее данному узлу состояние в общем пространстве состояний;
- 33. Производительность решения задачи
- 34. Принято оценивать производительность алгоритма с помощью следующих четырёх показателей Полнота. Гарантирует ли алгоритм обнаружение решения, если
- 35. Слепые методы поиска решений
- 36. Методы поиска в пространстве состояний подразделяются на две группы: методы «слепого» и упорядоченного (эвристического) поиска.
- 37. Методы «слепого» поиска называют также «не информированными» методами, так как в процессе поиска пути на графе
- 38. Методы "слепого" поиска можно разделить на три группы: Случайный поиск; Поиск «в глубину и ширину»; Алгоритм
- 39. Поиск с частичной информацией
- 41. Скачать презентацию
Слайд 3Поиск в пространстве состояний (англ. state space search) — группа методов, предназначенных для решения задач искусственного
Поиск в пространстве состояний (англ. state space search) — группа методов, предназначенных для решения задач искусственного
Слайд 41 Агенты, решающие задачи
1 Агенты, решающие задачи
Слайд 5Первым шагом в решении задачи является формулировка цели с учётом текущей ситуации
Первым шагом в решении задачи является формулировка цели с учётом текущей ситуации
Слайд 6Формулировка задачи представляет собой процесс определения того, какие действия и состояния следует
Формулировка задачи представляет собой процесс определения того, какие действия и состояния следует
Слайд 7Описанный процесс определения такой последовательности называется поиском.
Любой алгоритм поиска принимает в
Описанный процесс определения такой последовательности называется поиском.
Любой алгоритм поиска принимает в
Слайд 8Задача формально определяется с помощью следующих четырёх компонентов:
Начальное состояние, в котором агент
Задача формально определяется с помощью следующих четырёх компонентов:
Начальное состояние, в котором агент
Слайд 10Путём в пространстве состояний является последовательность состояний, соединённых последовательностью действий.
Путём в пространстве состояний является последовательность состояний, соединённых последовательностью действий.
Слайд 11Проверка цели позволяет определить, является ли данное конкретное состояние целевым состоянием.
Проверка цели позволяет определить, является ли данное конкретное состояние целевым состоянием.
Слайд 12Функция стоимости пути назначает числовое значение стоимости каждого пути.
Функция стоимости пути назначает числовое значение стоимости каждого пути.
Слайд 13Решением задачи является путь от начального состояния до целевого состояния.
Качество решения
Решением задачи является путь от начального состояния до целевого состояния.
Качество решения
Слайд 14Примеры задач
Примеры задач
Слайд 15Наиболее известные примеры решения задач подразделяются на два типа: упрощенные и реальные
Наиболее известные примеры решения задач подразделяются на два типа: упрощенные и реальные
Слайд 16Упрощенные задачи предназначены для иллюстрации или проверки различных методов решения задач.
Реальные
Упрощенные задачи предназначены для иллюстрации или проверки различных методов решения задач.
Реальные
Слайд 17Примеры упрощенных задач
Примеры упрощенных задач
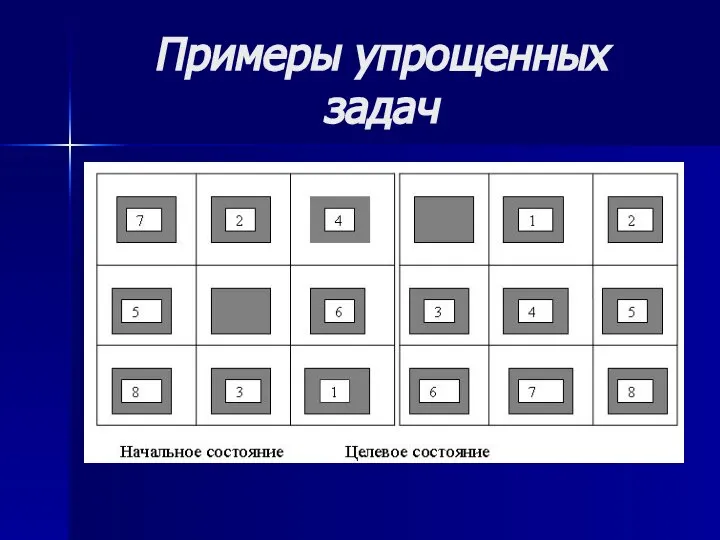
Слайд 18Задачи со скользящими фишками часто используются в искусственном интеллекте для проверки новых
Задачи со скользящими фишками часто используются в искусственном интеллекте для проверки новых
Слайд 19Задачи относятся к классу недетерминированных полиномиальных задач (NP-классу, сокращение от Nondeterministic Polynomial),
Задачи относятся к классу недетерминированных полиномиальных задач (NP-классу, сокращение от Nondeterministic Polynomial),
Слайд 20Примеры реальных задач
Одними из наиболее распространённых являются задачи поиска маршрута в терминах
Примеры реальных задач
Одними из наиболее распространённых являются задачи поиска маршрута в терминах
Слайд 21В задачах автоматического упорядочения сборки сложных объектов роботом цель состоит в определении
В задачах автоматического упорядочения сборки сложных объектов роботом цель состоит в определении
Слайд 22Поиск решений
Поиск решений
Слайд 23Сформулировав определённые задачи, необходимо найти их решения. Такая цель достигается посредством поиска
Сформулировав определённые задачи, необходимо найти их решения. Такая цель достигается посредством поиска
Слайд 24Порядок, в котором происходит развёртывание состояний, определяется стратегией поиска.
Порядок, в котором происходит развёртывание состояний, определяется стратегией поиска.
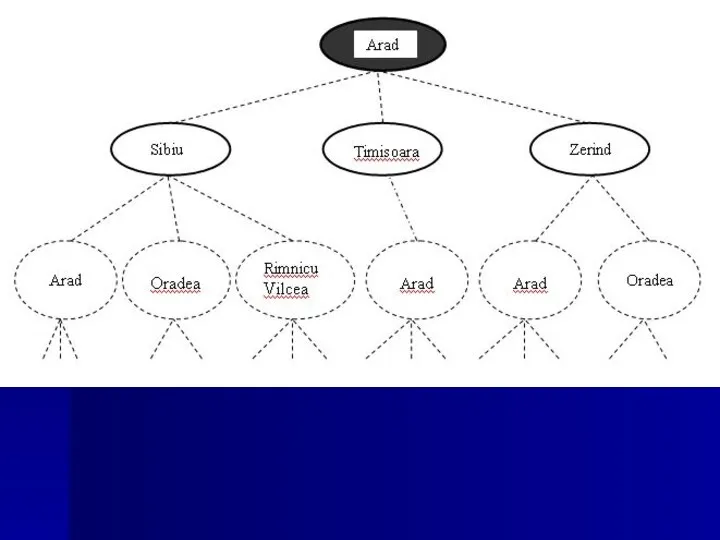
Слайд 25Корнем этого дерева поиска является поисковый узел, соответствующий начальному состоянию
Первый этап
Корнем этого дерева поиска является поисковый узел, соответствующий начальному состоянию
Первый этап
Слайд 26Развёртывание текущего состояния приводит к формированию его преемника - нового множества состояний
Развёртывание текущего состояния приводит к формированию его преемника - нового множества состояний
Слайд 27Суть поиска состоит в том, что пока проверяется один вариант, другие откладываются
Суть поиска состоит в том, что пока проверяется один вариант, другие откладываются
Слайд 28Узлы представляют собой структуры данных, применяемых при построении дерева поиска, а состояние
Узлы представляют собой структуры данных, применяемых при построении дерева поиска, а состояние
Слайд 31Каждый узел имеет родительский узел, содержит данные о состоянии и имеет различные
Каждый узел имеет родительский узел, содержит данные о состоянии и имеет различные
Слайд 32Структура данных может включать в себя:
State - соответствующее данному узлу состояние
Структура данных может включать в себя:
State - соответствующее данному узлу состояние
Слайд 33Производительность решения задачи
Производительность решения задачи
Слайд 34Принято оценивать производительность алгоритма с помощью следующих четырёх показателей
Полнота. Гарантирует ли алгоритм
Принято оценивать производительность алгоритма с помощью следующих четырёх показателей
Полнота. Гарантирует ли алгоритм
Слайд 35Слепые методы поиска решений
Слепые методы поиска решений
Слайд 36Методы поиска в пространстве состояний подразделяются на две группы: методы «слепого» и
Методы поиска в пространстве состояний подразделяются на две группы: методы «слепого» и
Слайд 37Методы «слепого» поиска называют также «не информированными» методами, так как в процессе
Методы «слепого» поиска называют также «не информированными» методами, так как в процессе
Слайд 38Методы "слепого" поиска можно разделить на три группы:
Случайный поиск;
Поиск «в глубину
Методы "слепого" поиска можно разделить на три группы:
Случайный поиск;
Поиск «в глубину
Слайд 39Поиск с частичной информацией
Поиск с частичной информацией
 Массивы. Массив vs vector/string
Массивы. Массив vs vector/string Библиотека – чудесная страна
Библиотека – чудесная страна Понятия Истина и Ложь (4 класс)
Понятия Истина и Ложь (4 класс) Школа Интернет Магазинов Ekomers
Школа Интернет Магазинов Ekomers Портфолио. Выполненные работы
Портфолио. Выполненные работы Разработка персонализированной системы тестирования и проверки
Разработка персонализированной системы тестирования и проверки Паскаль. Циклические вычисления
Паскаль. Циклические вычисления Дистанционный режим. Работа на сайте Учи.ру
Дистанционный режим. Работа на сайте Учи.ру Основы видеомонтажа и видеосъемки
Основы видеомонтажа и видеосъемки Язык Java
Язык Java 1 часть исследования. Инструкция
1 часть исследования. Инструкция Комплекс лабораторных работ по дисциплине Технические и аудиовизуальные технологии обучения
Комплекс лабораторных работ по дисциплине Технические и аудиовизуальные технологии обучения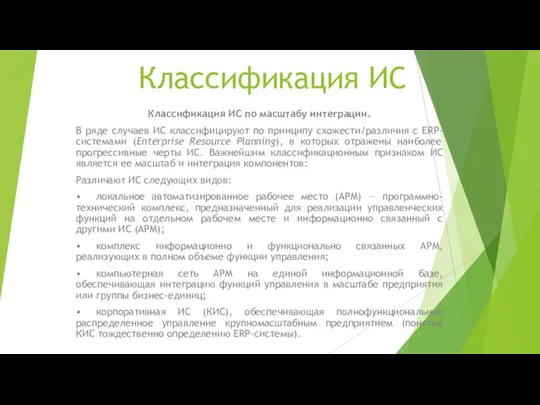 Классификация ИС
Классификация ИС Карта социологических организаций и информационных ресурсов России
Карта социологических организаций и информационных ресурсов России Работа в Excel 2007. Основы
Работа в Excel 2007. Основы Электронное правительство Республики Казахстан
Электронное правительство Республики Казахстан Introducing the new Contozo XYZ
Introducing the new Contozo XYZ Операционная система
Операционная система Собчак. Выборы 2018
Собчак. Выборы 2018 Как настраивать рекламу в Facebook
Как настраивать рекламу в Facebook Интернет. Что такое интернет?
Интернет. Что такое интернет? Онлайн-обучение портал Elducation.Ru, дистанционный курс Гибкие компетенции в проектной деятельности
Онлайн-обучение портал Elducation.Ru, дистанционный курс Гибкие компетенции в проектной деятельности Сетевые службы. Кластеры
Сетевые службы. Кластеры Что такое Интернет?
Что такое Интернет? Финансовая безопасность
Финансовая безопасность Система распознавания лиц для контроля доступа на объект
Система распознавания лиц для контроля доступа на объект Neural Networks
Neural Networks Принципы разработки производственных систем
Принципы разработки производственных систем