- Кибернетические системы

Содержание
- 2. Литература Введение в системный анализ : Учеб. пособие для студ. агроном. спец. / А. М. Гатаулин.
- 3. 1. Понятие кибернетической системы Система управления, или кибернетическая система, характеризуется: целью управления; объектом управления (управляемой подсистемой);
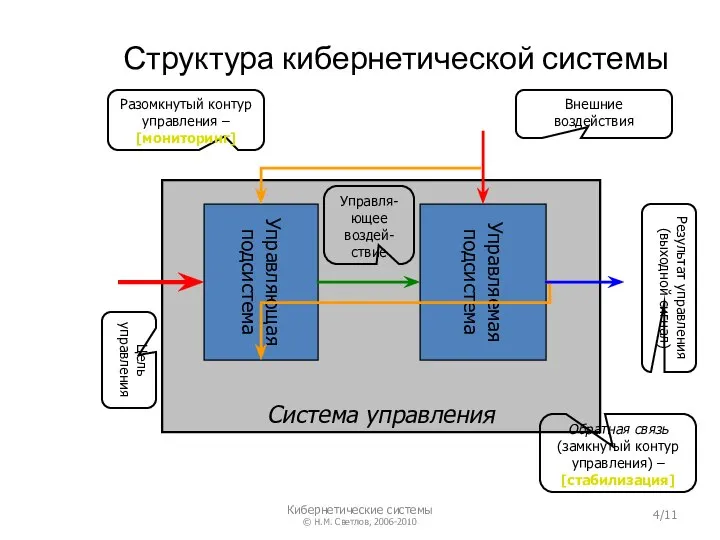
- 4. Структура кибернетической системы Система управления Управляющая подсистема Управляемая подсистема Цель управления Управля-ющее воздей-ствие Обратная связь (замкнутый
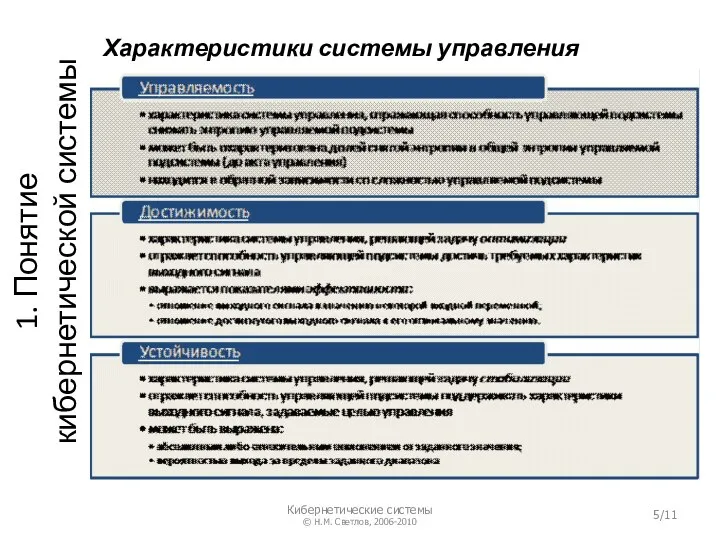
- 5. 1. Понятие кибернетической системы Характеристики системы управления Кибернетические системы © Н.М. Светлов, 2006-2010 /11
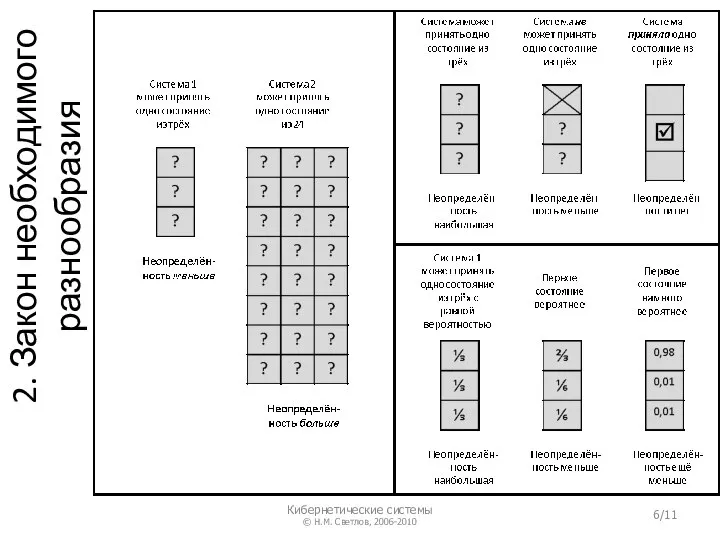
- 6. 2. Закон необходимого разнообразия Кибернетические системы © Н.М. Светлов, 2006-2010 /11
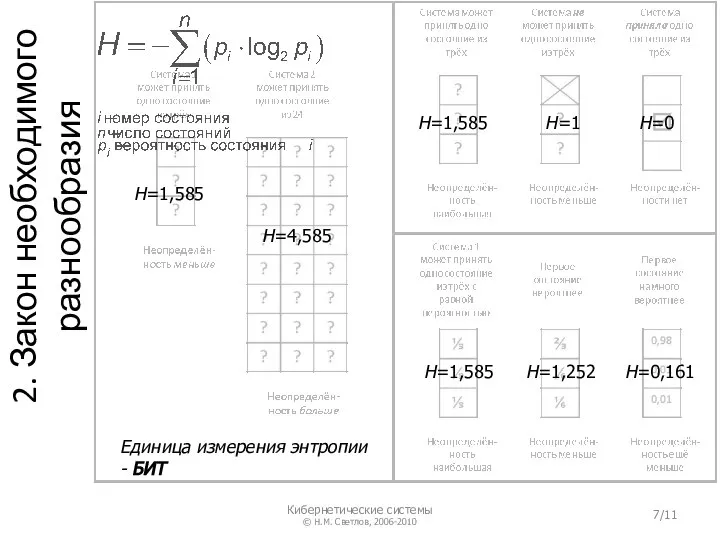
- 7. 2. Закон необходимого разнообразия H=1,585 H=4,585 H=1,585 H=1 H=0 H=1,585 H=1,252 H=0,161 Единица измерения энтропии -
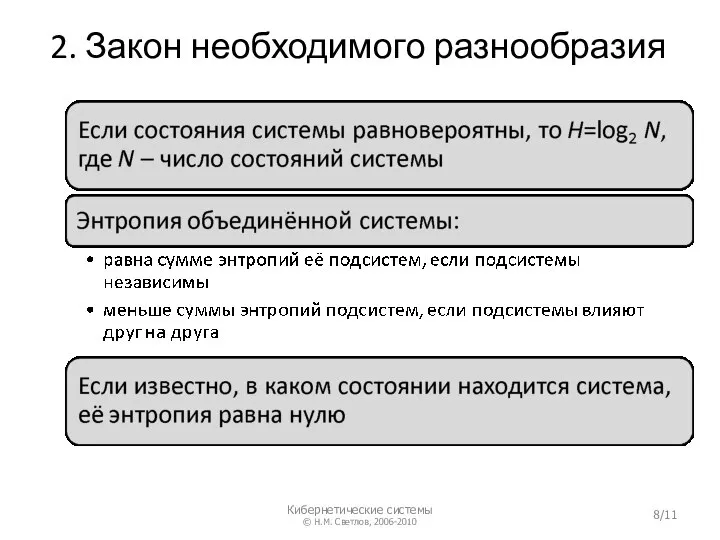
- 8. 2. Закон необходимого разнообразия Кибернетические системы © Н.М. Светлов, 2006-2010 /11
- 9. 2. Закон необходимого разнообразия Кибернетические системы © Н.М. Светлов, 2006-2010 /11
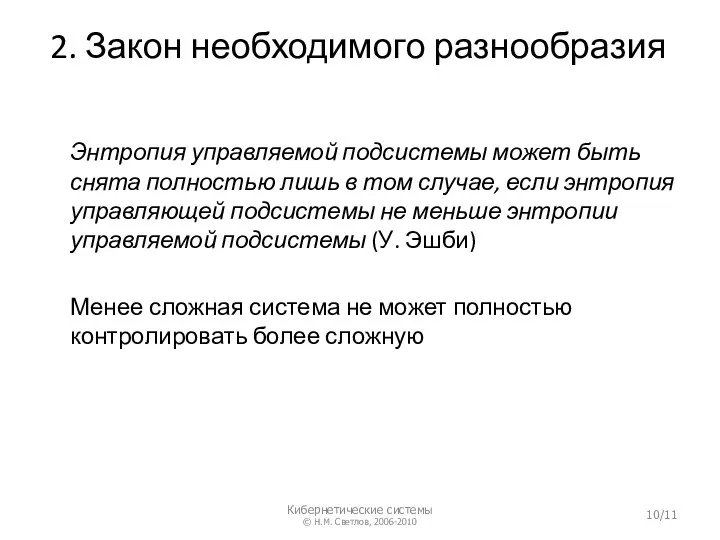
- 10. 2. Закон необходимого разнообразия Энтропия управляемой подсистемы может быть снята полностью лишь в том случае, если
- 12. Скачать презентацию
Слайд 31. Понятие кибернетической системы
Система управления, или кибернетическая система, характеризуется:
целью управления;
объектом управления (управляемой
1. Понятие кибернетической системы
Система управления, или кибернетическая система, характеризуется:
целью управления;
объектом управления (управляемой
Слайд 4Структура кибернетической системы
Система управления
Управляющая подсистема
Управляемая подсистема
Цель управления
Управля-ющее воздей-ствие
Обратная связь (замкнутый контур управления)
Структура кибернетической системы
Система управления
Управляющая подсистема
Управляемая подсистема
Цель управления
Управля-ющее воздей-ствие
Обратная связь (замкнутый контур управления)
Слайд 51. Понятие
кибернетической системы
Характеристики системы управления
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
1. Понятие
кибернетической системы
Характеристики системы управления
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
Слайд 62. Закон необходимого
разнообразия
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
2. Закон необходимого
разнообразия
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
Слайд 72. Закон необходимого
разнообразия
H=1,585
H=4,585
H=1,585
H=1
H=0
H=1,585
H=1,252
H=0,161
Единица измерения энтропии - БИТ
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
2. Закон необходимого
разнообразия
H=1,585
H=4,585
H=1,585
H=1
H=0
H=1,585
H=1,252
H=0,161
Единица измерения энтропии - БИТ
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
Слайд 82. Закон необходимого разнообразия
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
2. Закон необходимого разнообразия
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
Слайд 92. Закон необходимого разнообразия
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11
2. Закон необходимого разнообразия
Кибернетические системы
© Н.М. Светлов, 2006-2010
/11

Слайд 102. Закон необходимого разнообразия
Энтропия управляемой подсистемы может быть снята полностью лишь в
2. Закон необходимого разнообразия
Энтропия управляемой подсистемы может быть снята полностью лишь в
 Файл robots.txt
Файл robots.txt Современные подходы к моделированию
Современные подходы к моделированию Tables – таблицы
Tables – таблицы Зашифрованная переписка
Зашифрованная переписка Компьютерные интегрированные системы
Компьютерные интегрированные системы Сайт корректировки
Сайт корректировки Lokalnye_i_globalnye_kompyuternye_seti
Lokalnye_i_globalnye_kompyuternye_seti Введение в блокчейн
Введение в блокчейн Правила и требования
Правила и требования PAM
PAM Вплив пандемії COVID-19 на розвиток фінтеху
Вплив пандемії COVID-19 на розвиток фінтеху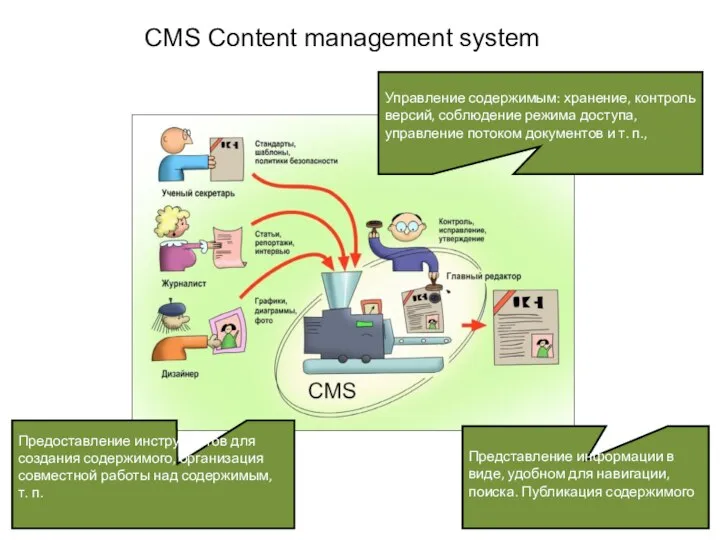 Content Managment System
Content Managment System Определи иконку офисной программы по её названию
Определи иконку офисной программы по её названию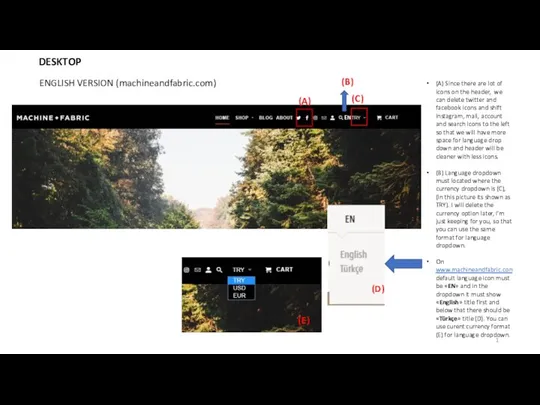 Desktop (b) english version
Desktop (b) english version Операционные системы интернет серверов
Операционные системы интернет серверов Составление блок-схем
Составление блок-схем Системы счисления
Системы счисления Партнерская система ЗОРАН
Партнерская система ЗОРАН Топология сетей. Тест
Топология сетей. Тест Презентация на тему Системы счисления
Презентация на тему Системы счисления  Изобретения, которые потрясли мир
Изобретения, которые потрясли мир Газета Рыбак рыбака
Газета Рыбак рыбака ОС и базы данных
ОС и базы данных Технологии создания и преобразования информационных объектов. Тема 4
Технологии создания и преобразования информационных объектов. Тема 4 Наследование. Простой класс
Наследование. Простой класс Текстовая информация
Текстовая информация СУБД - совокупность программных и лингвистических средств общего или специального назначения
СУБД - совокупность программных и лингвистических средств общего или специального назначения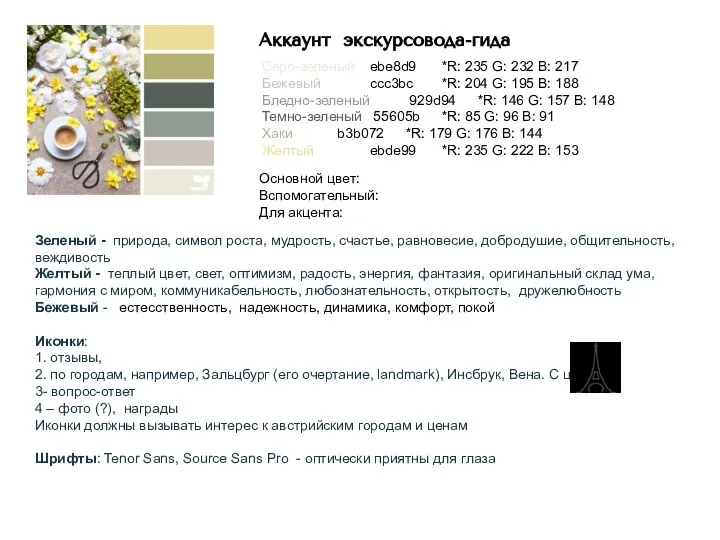 Аккаунт экскурсовода-гида
Аккаунт экскурсовода-гида