- Основы программирования. Пути на графах

Содержание
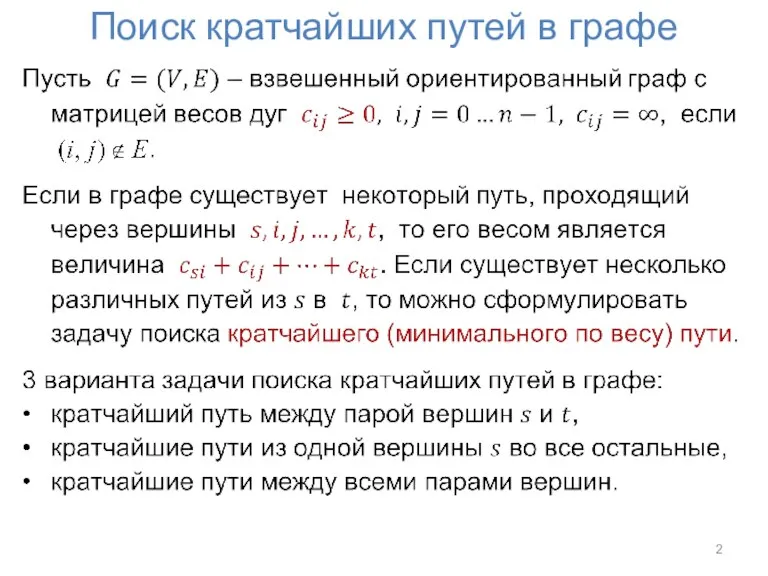
- 2. Поиск кратчайших путей в графе
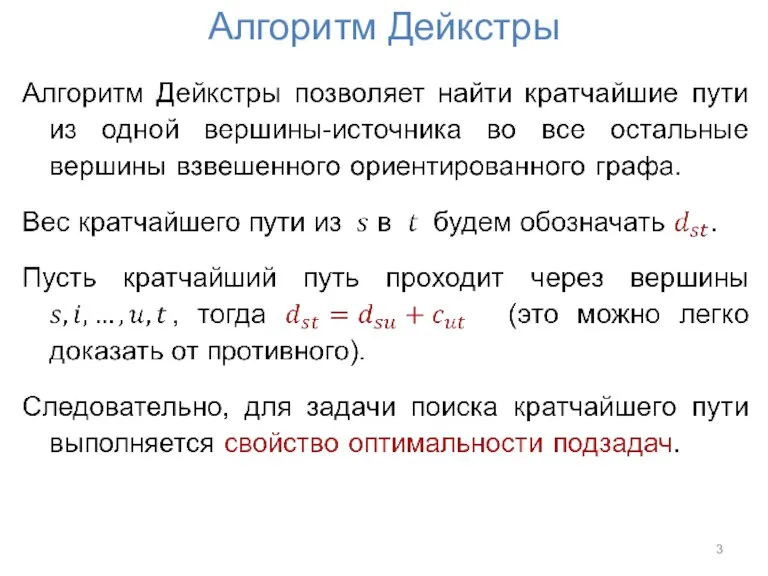
- 3. Алгоритм Дейкстры
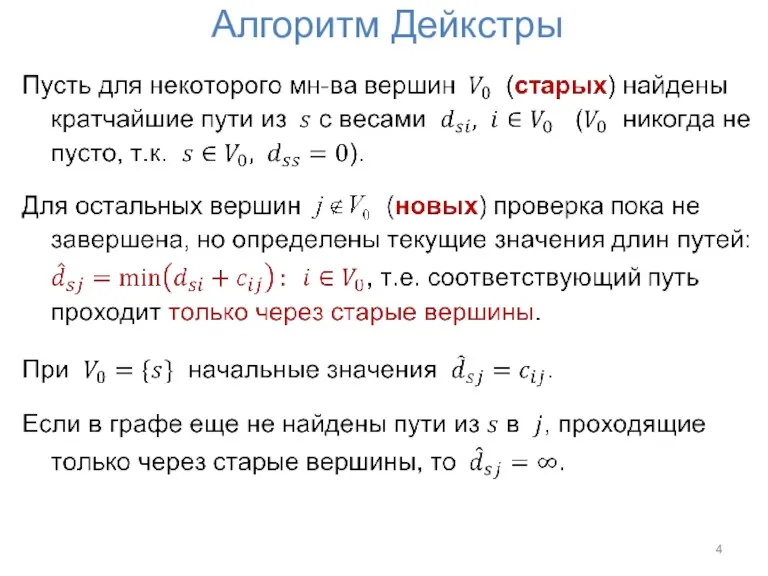
- 4. Алгоритм Дейкстры
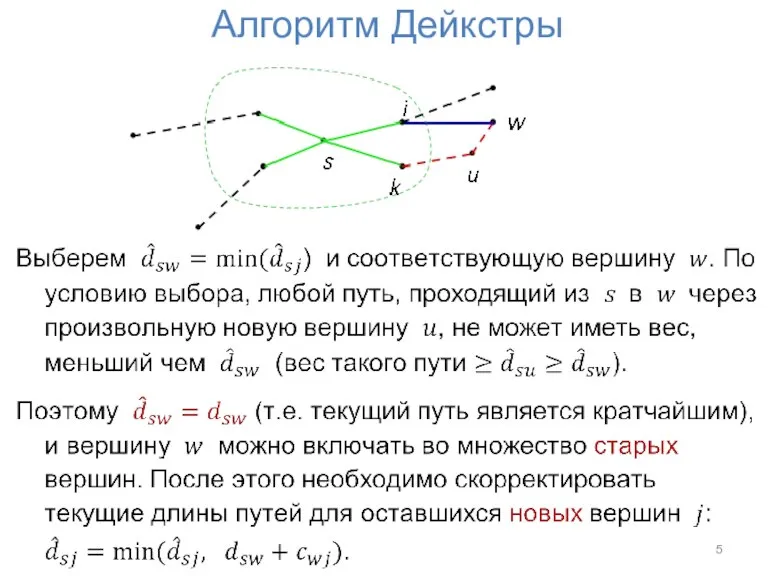
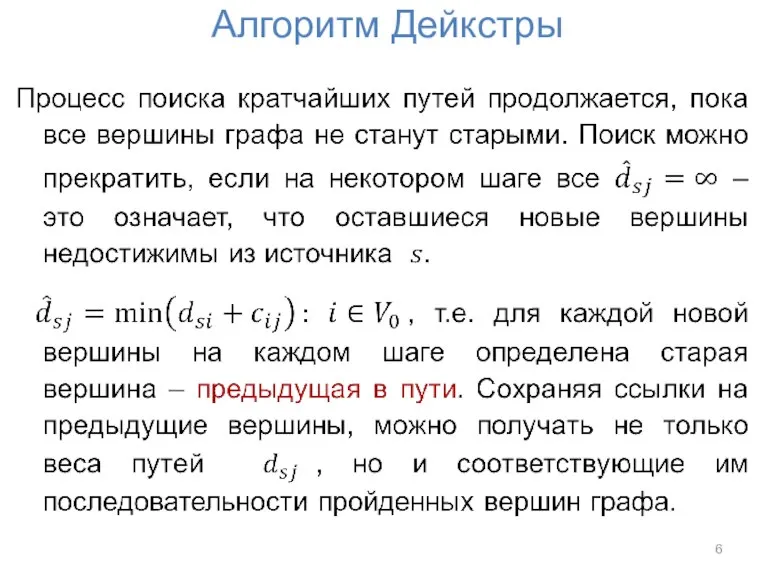
- 5. Алгоритм Дейкстры
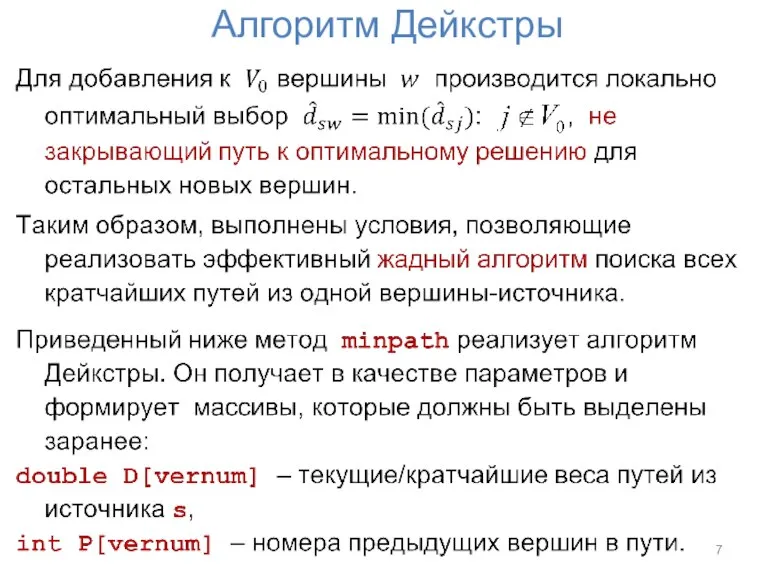
- 6. Алгоритм Дейкстры
- 7. Алгоритм Дейкстры
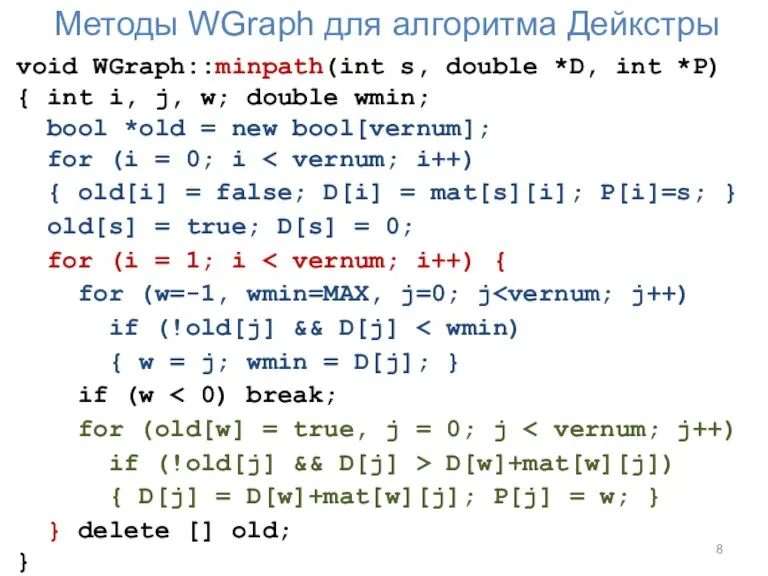
- 8. Методы WGraph для алгоритма Дейкстры void WGraph::minpath(int s, double *D, int *P) { int i, j,
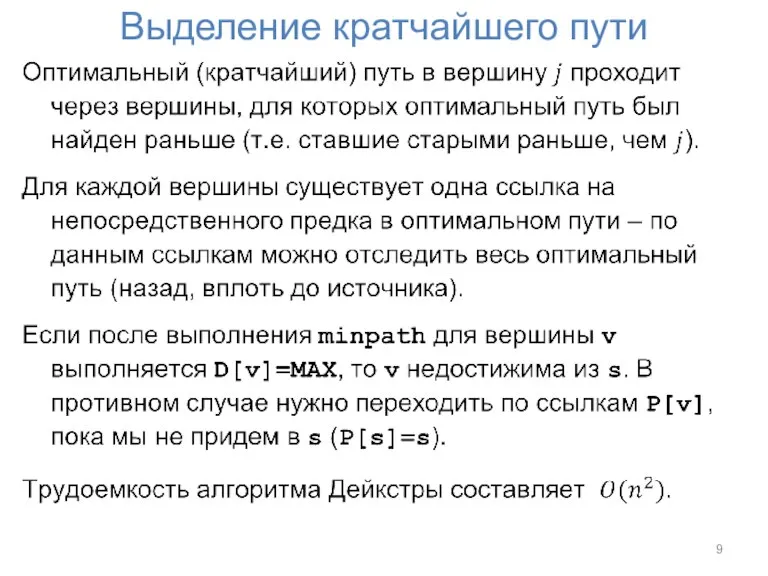
- 9. Выделение кратчайшего пути
- 10. Вычисление кратчайших расстояний от вершины s до всех остальных Матрица расстояний в общем случае несимметричная s=0
- 11. Вычисление кратчайших расстояний от вершины s до всех остальных Матрица расстояний: s=0 Кратчайшие расстояния от вершины
- 12. Алгоритм Флойда-Уоршалла
- 13. Алгоритм Флойда-Уоршалла
- 14. Алгоритм Флойда-Уоршалла
- 15. Алгоритм Флойда-Уоршалла Вычисляется матрица весов всех кратчайших путей. double** WGraph::allminpath() { int i, j, l; double
- 16. Замечания к алгоритму Флойда-Уоршалла Алгоритм Флойда-Уоршалла –пример использования динамического программирования. Условия, при которых применимо ДП: оптимизационная
- 17. Замечания к алгоритму Флойда-Уоршалла Порядок решения задачи с помощью ДП: описать структуру оптимальных решений задачи и
- 18. Эйлеровы циклы и пути Эйлеров цикл в неориентированном графе: начинается в произвольной вершине a проходит по
- 19. Идея алгоритма построения цикла/пути Вычисляются степени всех вершин. Если условия существования цикла/пути не выполняются, то выход.
- 20. Замечания по алгоритму Текущий путь и побочные циклы выгодно строить в виде списков. Используем для этого
- 21. Вставка побочного цикла в текущий
- 22. Вставка списка в список Вставка списка sec после текущего элемента (текущая позиция pcurpos не изменяется): bool
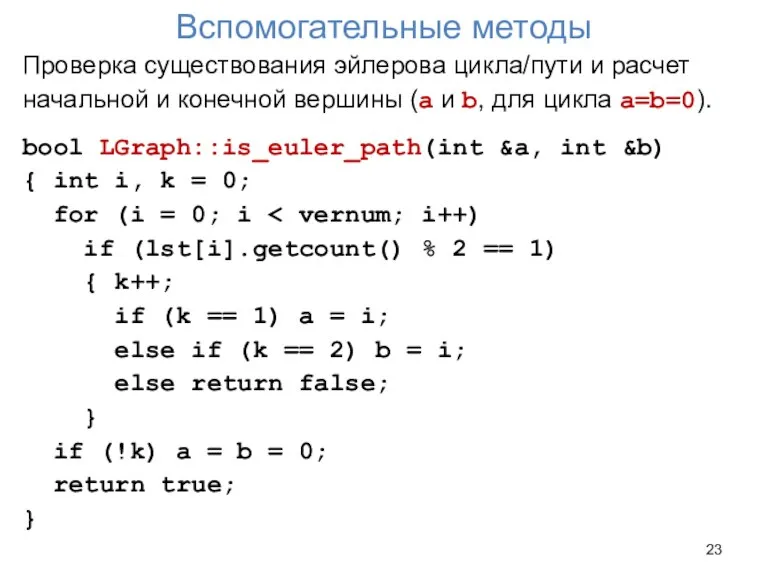
- 23. Вспомогательные методы Проверка существования эйлерова цикла/пути и расчет начальной и конечной вершины (a и b, для
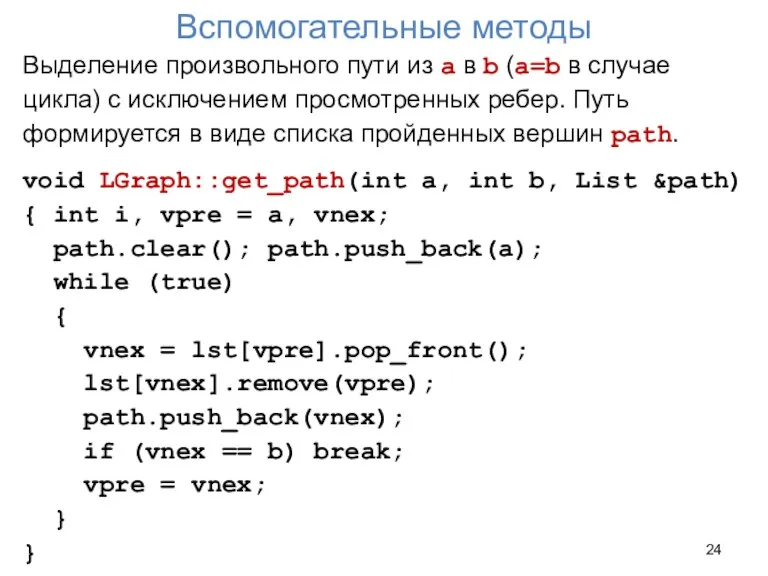
- 24. Вспомогательные методы Выделение произвольного пути из a в b (a=b в случае цикла) с исключением просмотренных
- 26. Скачать презентацию
Слайд 3Алгоритм Дейкстры
Алгоритм Дейкстры
Слайд 4Алгоритм Дейкстры
Алгоритм Дейкстры
Слайд 5Алгоритм Дейкстры
Алгоритм Дейкстры
Слайд 6Алгоритм Дейкстры
Алгоритм Дейкстры
Слайд 7Алгоритм Дейкстры
Алгоритм Дейкстры
Слайд 8Методы WGraph для алгоритма Дейкстры
void WGraph::minpath(int s, double *D, int *P)
{
Методы WGraph для алгоритма Дейкстры
void WGraph::minpath(int s, double *D, int *P)
{
Слайд 9Выделение кратчайшего пути
Выделение кратчайшего пути
Слайд 10Вычисление кратчайших расстояний от вершины s до всех остальных
Матрица расстояний в общем
Вычисление кратчайших расстояний от вершины s до всех остальных
Матрица расстояний в общем

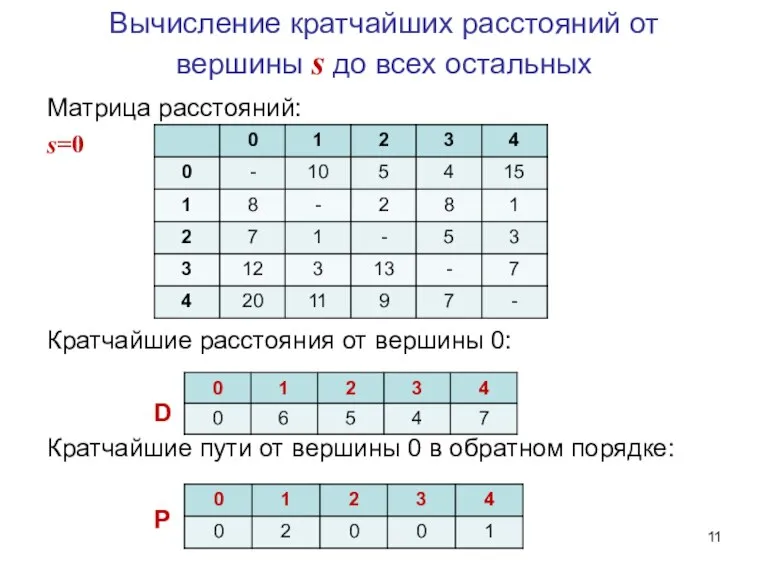
Слайд 11Вычисление кратчайших расстояний от вершины s до всех остальных
Матрица расстояний:
s=0
Кратчайшие расстояния от
Вычисление кратчайших расстояний от вершины s до всех остальных
Матрица расстояний:
s=0
Кратчайшие расстояния от
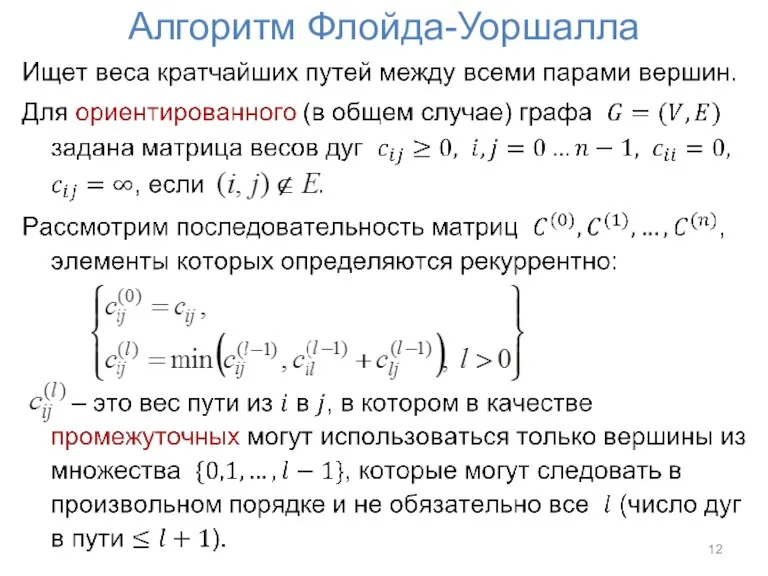
Слайд 12Алгоритм Флойда-Уоршалла
Алгоритм Флойда-Уоршалла
Слайд 13Алгоритм Флойда-Уоршалла
Алгоритм Флойда-Уоршалла
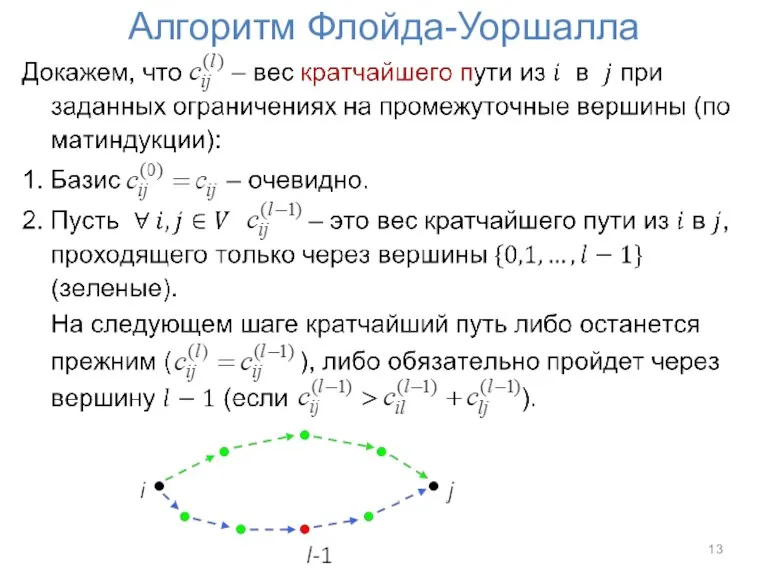
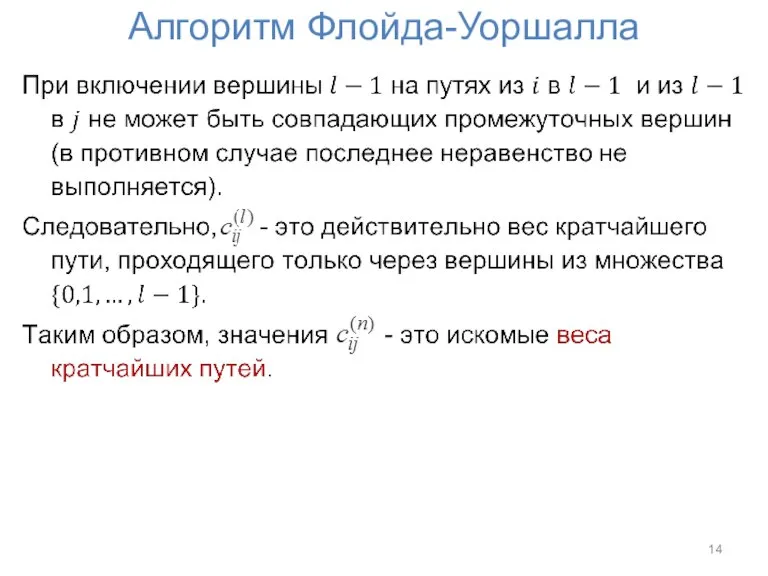
Слайд 14Алгоритм Флойда-Уоршалла
Алгоритм Флойда-Уоршалла
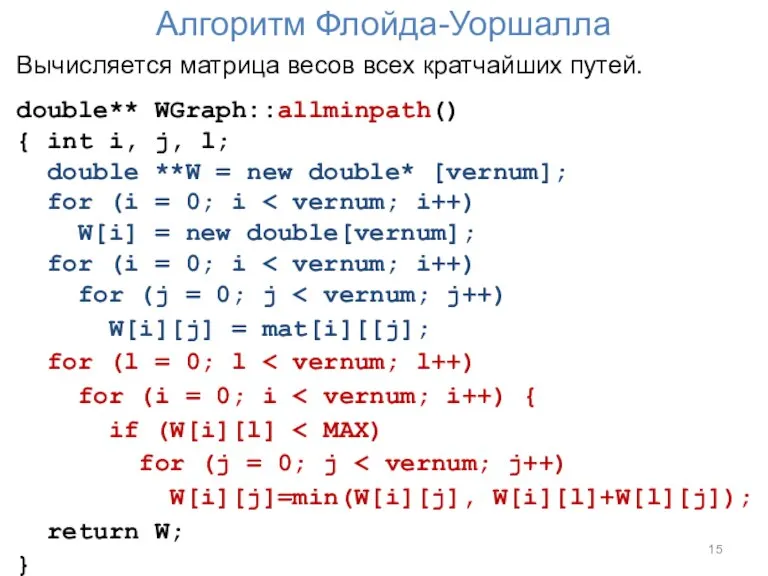
Слайд 15Алгоритм Флойда-Уоршалла
Вычисляется матрица весов всех кратчайших путей.
double** WGraph::allminpath()
{ int i, j,
Алгоритм Флойда-Уоршалла
Вычисляется матрица весов всех кратчайших путей.
double** WGraph::allminpath()
{ int i, j,
Слайд 16Замечания к алгоритму Флойда-Уоршалла
Алгоритм Флойда-Уоршалла –пример использования динамического программирования.
Условия, при которых
Замечания к алгоритму Флойда-Уоршалла
Алгоритм Флойда-Уоршалла –пример использования динамического программирования.
Условия, при которых
Слайд 17Замечания к алгоритму Флойда-Уоршалла
Порядок решения задачи с помощью ДП:
описать структуру оптимальных
Замечания к алгоритму Флойда-Уоршалла
Порядок решения задачи с помощью ДП:
описать структуру оптимальных
Слайд 18Эйлеровы циклы и пути
Эйлеров цикл в неориентированном графе:
начинается в произвольной вершине a
проходит
Эйлеровы циклы и пути
Эйлеров цикл в неориентированном графе:
начинается в произвольной вершине a
проходит
Слайд 19Идея алгоритма построения цикла/пути
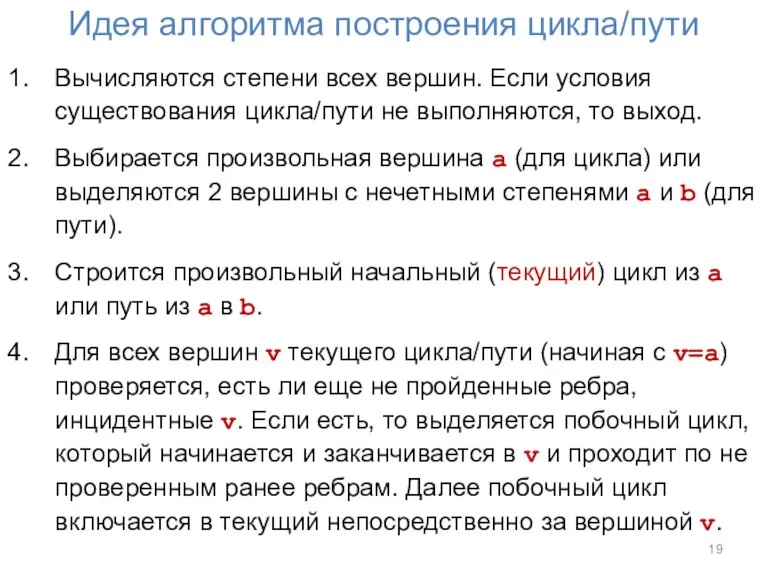
Вычисляются степени всех вершин. Если условия существования цикла/пути не
Идея алгоритма построения цикла/пути
Вычисляются степени всех вершин. Если условия существования цикла/пути не
Слайд 20Замечания по алгоритму
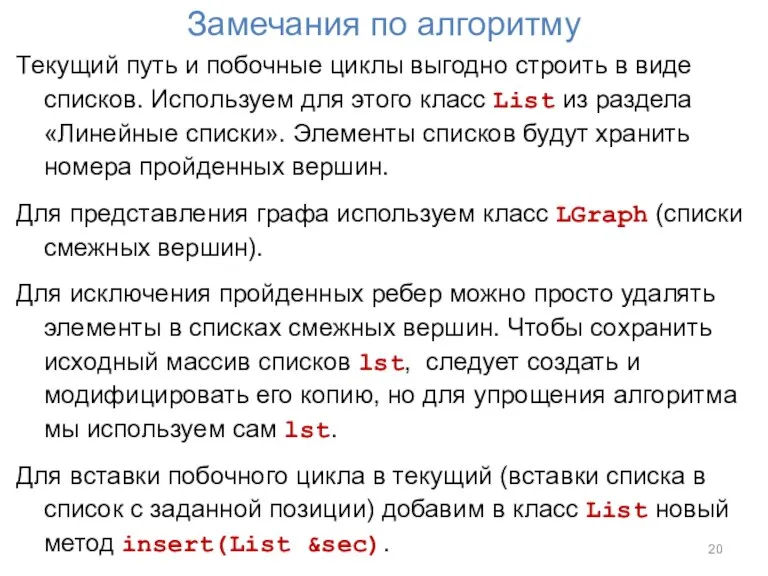
Текущий путь и побочные циклы выгодно строить в виде списков.
Замечания по алгоритму
Текущий путь и побочные циклы выгодно строить в виде списков.
Слайд 21Вставка побочного цикла в текущий
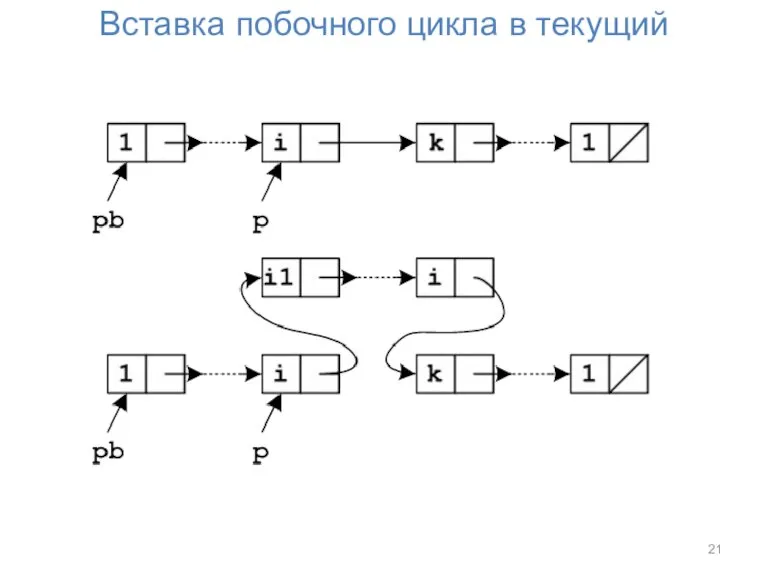
Вставка побочного цикла в текущий
Слайд 22Вставка списка в список
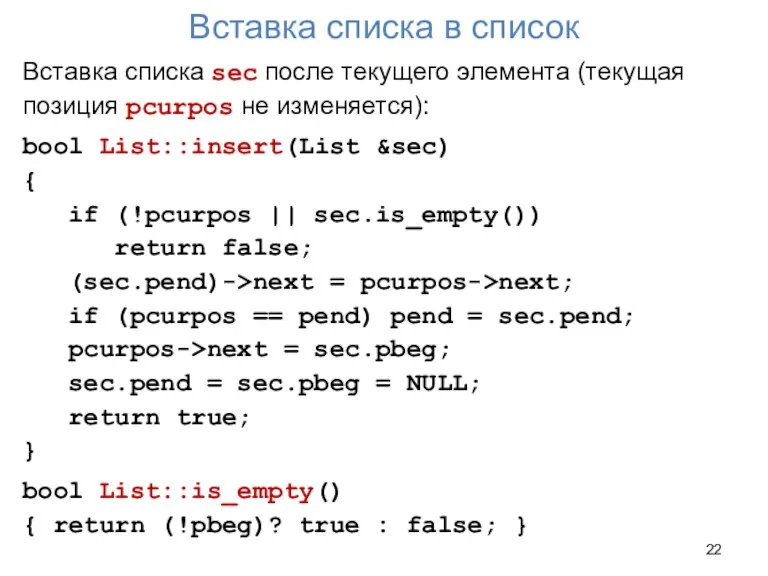
Вставка списка sec после текущего элемента (текущая позиция pcurpos
Вставка списка в список
Вставка списка sec после текущего элемента (текущая позиция pcurpos
Слайд 23Вспомогательные методы
Проверка существования эйлерова цикла/пути и расчет начальной и конечной вершины (a
Вспомогательные методы
Проверка существования эйлерова цикла/пути и расчет начальной и конечной вершины (a
Слайд 24Вспомогательные методы
Выделение произвольного пути из a в b (a=b в случае цикла)
Вспомогательные методы
Выделение произвольного пути из a в b (a=b в случае цикла)
 Лекция о научных публикациях
Лекция о научных публикациях Помехоустойчивость. Достоверность. Полоса пропускания
Помехоустойчивость. Достоверность. Полоса пропускания Процедуры и функции. Лабораторная работа
Процедуры и функции. Лабораторная работа Материалы курса Система автоматического программирования. Основные принципы & Подводные камни
Материалы курса Система автоматического программирования. Основные принципы & Подводные камни МЕТОДОЛОГИЯ ПРОЕКТИРОВАНИЯ
МЕТОДОЛОГИЯ ПРОЕКТИРОВАНИЯ Изучение истории семьи в интернете
Изучение истории семьи в интернете Антивирусная защита. Тема 3.3
Антивирусная защита. Тема 3.3 Работа с событиями аплета
Работа с событиями аплета Базовые алгоритмические конструкции. Лекция 5
Базовые алгоритмические конструкции. Лекция 5 Тармаклануны Паскаль телендә программалау
Тармаклануны Паскаль телендә программалау Презентация на тему История развития ЭВМ
Презентация на тему История развития ЭВМ  Инструменты графического редактора костюмов и фонов: растровый и векторный режим
Инструменты графического редактора костюмов и фонов: растровый и векторный режим 2022_10_07_AO_i_PO_PK
2022_10_07_AO_i_PO_PK Online fine system for drivers
Online fine system for drivers Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Сервис интерактивных упражнений – Wordwall
Сервис интерактивных упражнений – Wordwall Системное программирование (лекция 1)
Системное программирование (лекция 1) Дизайн проектирование (композиция, макетирование, современные концепции в искусстве)
Дизайн проектирование (композиция, макетирование, современные концепции в искусстве) Загрузка источников из базы данных
Загрузка источников из базы данных Дискретное представление информации
Дискретное представление информации Планирование задач
Планирование задач Старт партнерки
Старт партнерки Введение в Eclipse
Введение в Eclipse Блокированный жилой дом
Блокированный жилой дом Устройства образующие типовой компьютер
Устройства образующие типовой компьютер BazyDannykh_Teoria
BazyDannykh_Teoria Как попасть в киберспорт
Как попасть в киберспорт Модели данных. Современные СУБД (Урок 2)
Модели данных. Современные СУБД (Урок 2)