PnP Perspective-n-Point. Восстановление точек в 3D-пространстве по их перспективной проекции на плоскость сенсора камеры
- PnP Perspective-n-Point. Восстановление точек в 3D-пространстве по их перспективной проекции на плоскость сенсора камеры

Содержание
- 2. ОПРЕДЕЛЕНИЕ ЗАДАЧА PnP – восстановление точек в 3D-пространстве по их перспективной проекции на плоскость сенсора камеры.
- 3. СУТЬ Априорно известны: Rij (то есть геометрия тела) Коэффициенты дисторсии Матрица внутренних параметров камеры Координаты m1,
- 4. МАТЕМАТИКА P3P Система уравнений:
- 5. ПРОБЛЕМЫ P3P
- 6. ОДНОЗНАЧНОЕ РЕШЕНИЕ ДАЕТСЯ ПРИ N≥4
- 7. РЕШЕНИЕ В OPENCV
- 8. АЛГОРИТМЫ SOLVEPNP_ITERATIVE // На базе метода Левенберга-Марквардта SOLVEPNP_P3P // В действительности используется 4 точки* SOLVEPNP_EPNP //
- 9. EPNP
- 10. RANSAC (БОЛЕЕ УСТОЙЧИВОЕ К ВЫБРОСАМ)
- 11. О МЕТОДАХ: DLT - direct linear transformation method EPnP - efficient O(n) non-iterative solution of PnP
- 14. ПРИМЕР РЕШЕНИЯ ЗАДАЧИ PNP
- 16. Скачать презентацию
Слайд 2ОПРЕДЕЛЕНИЕ
ЗАДАЧА PnP – восстановление точек в 3D-пространстве по их перспективной проекции на
ОПРЕДЕЛЕНИЕ
ЗАДАЧА PnP – восстановление точек в 3D-пространстве по их перспективной проекции на

Слайд 3СУТЬ
Априорно известны:
Rij (то есть геометрия тела)
Коэффициенты дисторсии
Матрица внутренних параметров камеры
Координаты m1, m2,
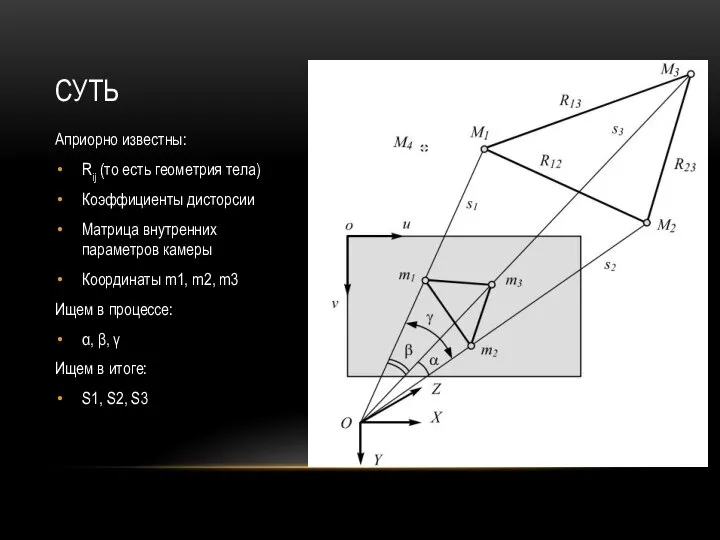
СУТЬ
Априорно известны:
Rij (то есть геометрия тела)
Коэффициенты дисторсии
Матрица внутренних параметров камеры
Координаты m1, m2,
Слайд 4МАТЕМАТИКА P3P
Система уравнений:
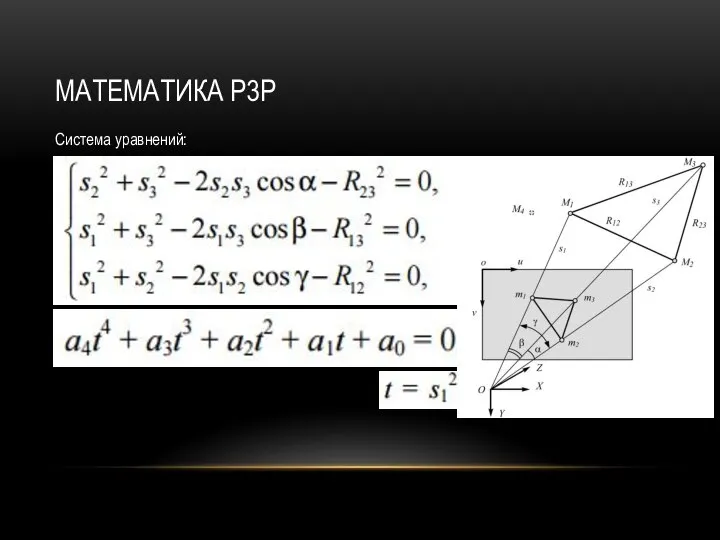
МАТЕМАТИКА P3P
Система уравнений:
Слайд 5ПРОБЛЕМЫ P3P
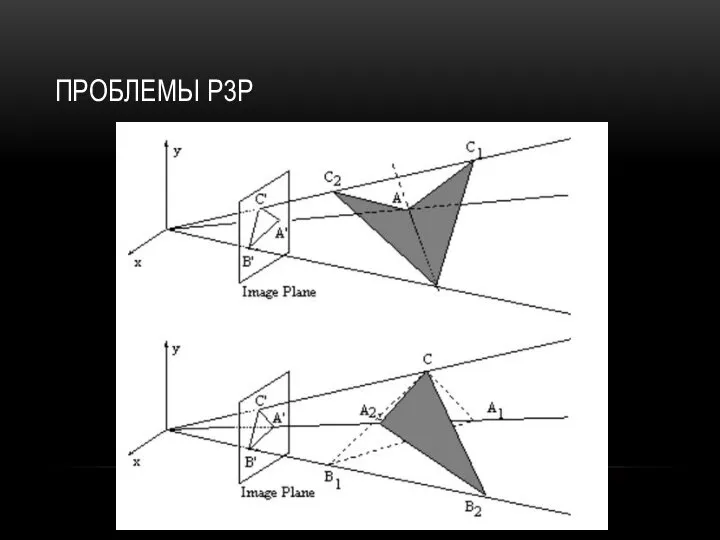
ПРОБЛЕМЫ P3P
Слайд 6ОДНОЗНАЧНОЕ РЕШЕНИЕ ДАЕТСЯ ПРИ N≥4
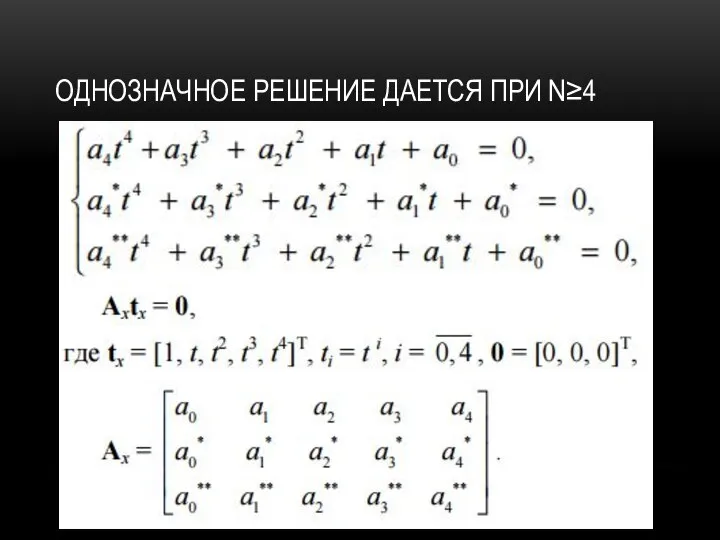
ОДНОЗНАЧНОЕ РЕШЕНИЕ ДАЕТСЯ ПРИ N≥4
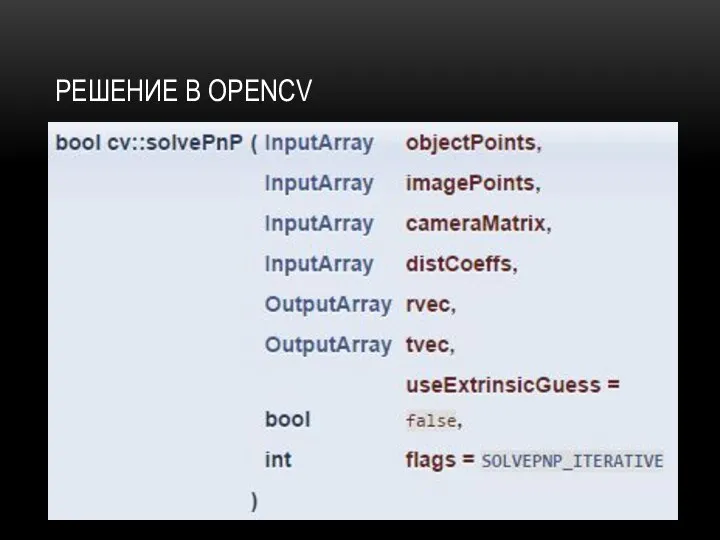
Слайд 7РЕШЕНИЕ В OPENCV
РЕШЕНИЕ В OPENCV
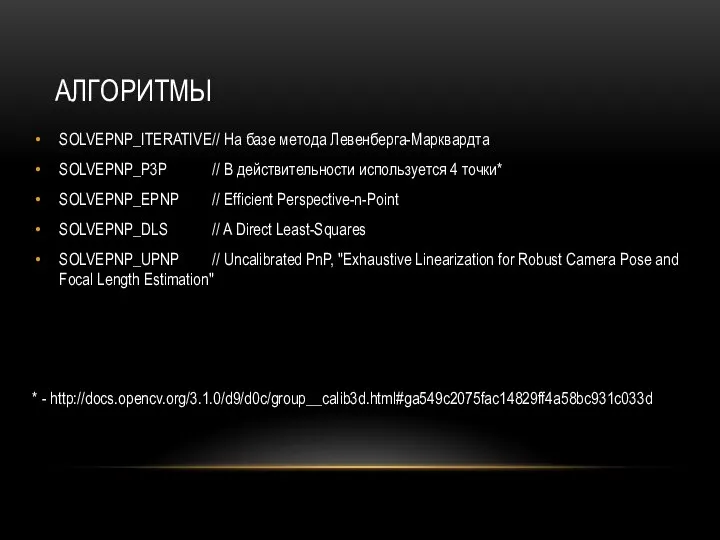
Слайд 8АЛГОРИТМЫ
SOLVEPNP_ITERATIVE // На базе метода Левенберга-Марквардта
SOLVEPNP_P3P // В действительности используется 4 точки*
SOLVEPNP_EPNP // Efficient Perspective-n-Point
SOLVEPNP_DLS //
АЛГОРИТМЫ
SOLVEPNP_ITERATIVE // На базе метода Левенберга-Марквардта
SOLVEPNP_P3P // В действительности используется 4 точки*
SOLVEPNP_EPNP // Efficient Perspective-n-Point
SOLVEPNP_DLS //
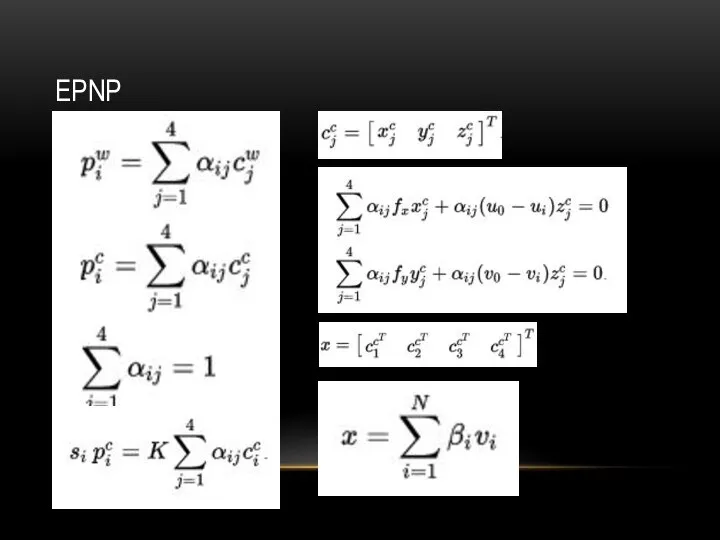
Слайд 9EPNP
EPNP
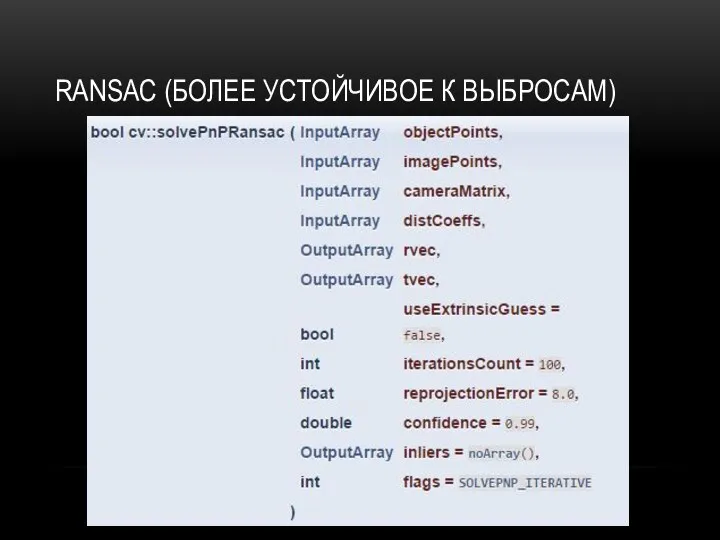
Слайд 10RANSAC (БОЛЕЕ УСТОЙЧИВОЕ К ВЫБРОСАМ)
RANSAC (БОЛЕЕ УСТОЙЧИВОЕ К ВЫБРОСАМ)
Слайд 11О МЕТОДАХ:
DLT - direct linear transformation method
EPnP - efficient O(n) non-iterative solution
О МЕТОДАХ:
DLT - direct linear transformation method
EPnP - efficient O(n) non-iterative solution


Слайд 14ПРИМЕР РЕШЕНИЯ ЗАДАЧИ PNP
ПРИМЕР РЕШЕНИЯ ЗАДАЧИ PNP

 Презентация на тему Алгебра логики вторая часть
Презентация на тему Алгебра логики вторая часть  Понятие и назначение сервисных программ. Контрольная работа
Понятие и назначение сервисных программ. Контрольная работа Интернет. Территория безопасности
Интернет. Территория безопасности Технология работы с текстовой информацией
Технология работы с текстовой информацией Пресса Африки
Пресса Африки Цифровая мода
Цифровая мода Как строить карьеру в третьем десятилетии XXI века
Как строить карьеру в третьем десятилетии XXI века Условный оператор, оператор выбора. Процедуры вводы-вывода. Логические операции в Паскале, таблицы истинности. Лекция 5
Условный оператор, оператор выбора. Процедуры вводы-вывода. Логические операции в Паскале, таблицы истинности. Лекция 5 Анализ группы Путинский рай
Анализ группы Путинский рай Системы управления содержимым CMS
Системы управления содержимым CMS Формирование изображения на экране монитора
Формирование изображения на экране монитора Кодирование информации
Кодирование информации Графические примитивы и команды их создания. Занятие №17
Графические примитивы и команды их создания. Занятие №17 Last 1 Year/Charge
Last 1 Year/Charge Пробное дополненное занятие по программированию
Пробное дополненное занятие по программированию Эволюция компьютерных систем
Эволюция компьютерных систем Интернет в жизни старшеклассников: за и против
Интернет в жизни старшеклассников: за и против Электронная рабочая тетрадь. Создание, понятие, структура
Электронная рабочая тетрадь. Создание, понятие, структура Функции Сппр
Функции Сппр Тексты в компьютерной памяти
Тексты в компьютерной памяти Системы счисления
Системы счисления Процессы проектирования
Процессы проектирования Система счисления
Система счисления История создания Интернета
История создания Интернета Регистрация сайта на Web-сервере. Закачка сайта на сервер по ftp-протоколу. 1 часть
Регистрация сайта на Web-сервере. Закачка сайта на сервер по ftp-протоколу. 1 часть Операционные системы
Операционные системы Презентация на тему Возможности операционной системы Linux в учебном процессе
Презентация на тему Возможности операционной системы Linux в учебном процессе  Эволюция интернета вещей
Эволюция интернета вещей