Московский государственный университет геодезии и картографии Московский государственный университет геодезии и картографии Функционльный Обзор комплекса мультироторнго БПЛА на примере “Кречет-Дредноут”
- Московский государственный университет геодезии и картографии Московский государственный университет геодезии и картографии Функционльный Обзор комплекса мультироторнго БПЛА на примере “Кречет-Дредноут”

Содержание
- 2. Студенты ФПКиФ 4курса: Барбасов В. К. Гаврюшин Н.М. Батаев М.С. Научный руководитель: проф. Алтынов Александр Ефимович.
- 3. Аннотация. В данной работе рассмотрен мультироторный комплекс БПЛА “Кречет-Дредноут” – его технические возможности и составляющие возможности.
- 4. Мультироторный БПЛА вертолетного типа разработанный в СКБ МИИГАиК «Кречет», – октокоптер «Дредноут». Аппарат может быть использован
- 5. Предыдущие аппараты
- 6. GPS - Магнитометр Информацию о своем местоположении и направлении аппарат получает от GPS(ublox neo) и магнитометра
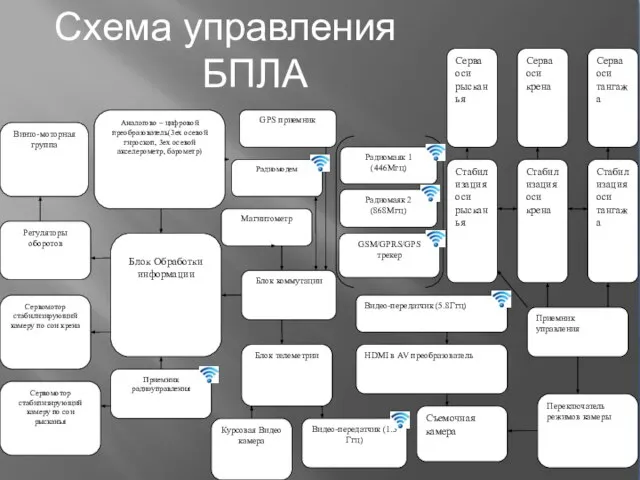
- 7. Схема управления БПЛА
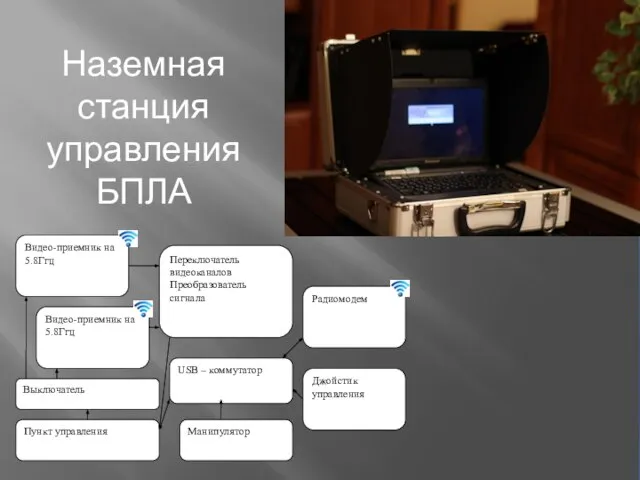
- 8. Наземная станция управления БПЛА
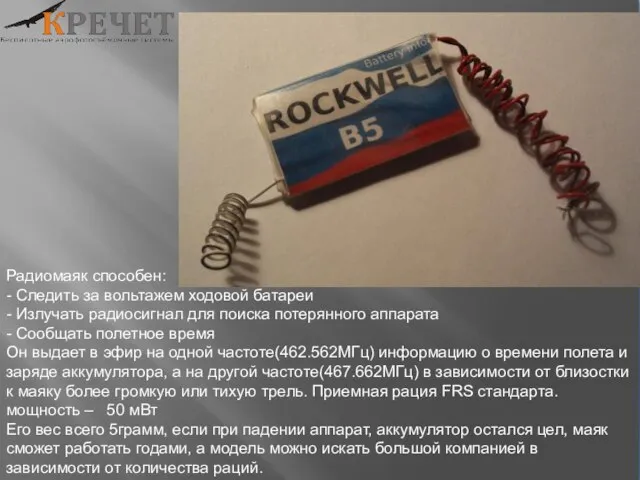
- 9. Радиомаяк способен: - Следить за вольтажем ходовой батареи - Излучать радиосигнал для поиска потерянного аппарата -
- 10. Следующий радиомаяк является дополнением к предыдущему и имеет свои особенности – у него есть автономный источник
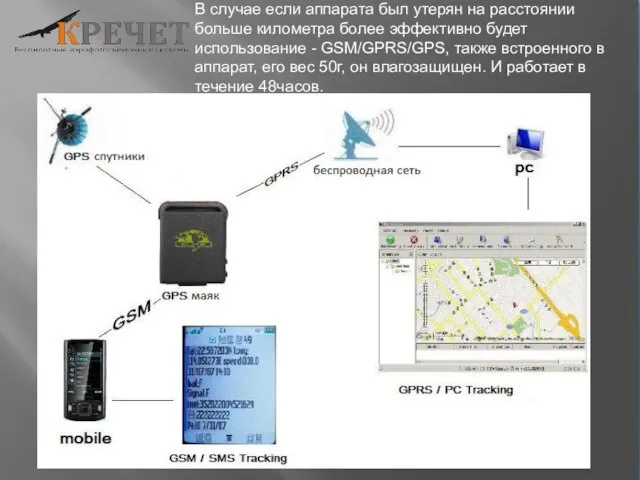
- 11. В случае если аппарата был утерян на расстоянии больше километра более эффективно будет использование - GSM/GPRS/GPS,
- 12. Из средств спасения в данном случае от утопания на борту аппарата имеется 6 систем представляющих собой
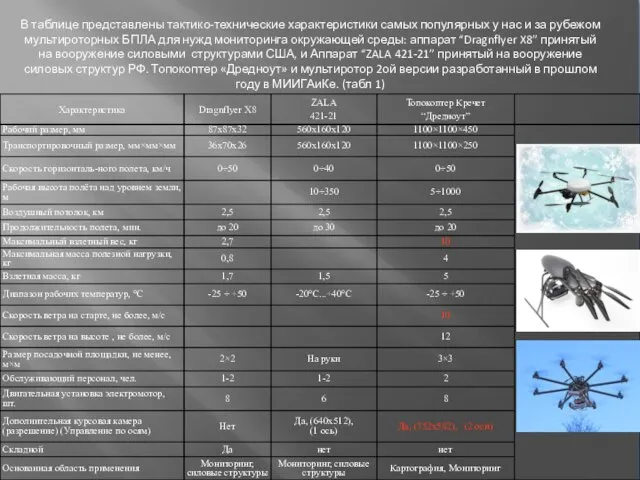
- 13. В таблице представлены тактико-технические характеристики самых популярных у нас и за рубежом мультироторных БПЛА для нужд
- 14. К полезной нагрузке для задач БПЛА могут относится: - цифровая фотокамера (видеокамера) -тепловизор -ИК-камера - радиолакационное
- 15. Выводы: Усовершенствование данной мультироторной БАС по приведенным выше параметрам, дадут удобность эксплуатации и необходимую точность и
- 16. Спасибо за внимание
- 23. Скачать презентацию
Слайд 2Студенты ФПКиФ 4курса:
Барбасов В. К.
Гаврюшин Н.М. Батаев М.С.
Научный руководитель:
проф. Алтынов
Студенты ФПКиФ 4курса:
Барбасов В. К.
Гаврюшин Н.М. Батаев М.С.
Научный руководитель:
проф. Алтынов
Слайд 3Аннотация. В данной работе рассмотрен мультироторный комплекс БПЛА “Кречет-Дредноут” – его технические
Аннотация. В данной работе рассмотрен мультироторный комплекс БПЛА “Кречет-Дредноут” – его технические
Слайд 4Мультироторный БПЛА вертолетного типа разработанный в СКБ МИИГАиК «Кречет», – октокоптер «Дредноут». Аппарат
Мультироторный БПЛА вертолетного типа разработанный в СКБ МИИГАиК «Кречет», – октокоптер «Дредноут». Аппарат

Слайд 5Предыдущие аппараты
Предыдущие аппараты

Слайд 6GPS - Магнитометр
Информацию о своем местоположении и направлении аппарат получает от GPS(ublox
GPS - Магнитометр
Информацию о своем местоположении и направлении аппарат получает от GPS(ublox

Слайд 7Схема управления БПЛА
Схема управления БПЛА
Слайд 8Наземная станция управления БПЛА
Наземная станция управления БПЛА
Слайд 9Радиомаяк способен:
- Следить за вольтажем ходовой батареи
- Излучать радиосигнал для поиска потерянного
Радиомаяк способен:
- Следить за вольтажем ходовой батареи
- Излучать радиосигнал для поиска потерянного
Слайд 10Следующий радиомаяк является дополнением к предыдущему и имеет свои особенности – у
Следующий радиомаяк является дополнением к предыдущему и имеет свои особенности – у

Слайд 11В случае если аппарата был утерян на расстоянии больше километра более эффективно
В случае если аппарата был утерян на расстоянии больше километра более эффективно
Слайд 12Из средств спасения в данном случае от утопания на борту аппарата имеется
Из средств спасения в данном случае от утопания на борту аппарата имеется

Слайд 13В таблице представлены тактико-технические характеристики самых популярных у нас и за рубежом
В таблице представлены тактико-технические характеристики самых популярных у нас и за рубежом
Слайд 14К полезной нагрузке для задач БПЛА могут относится:
- цифровая фотокамера (видеокамера)
-тепловизор
-ИК-камера
- радиолакационное
К полезной нагрузке для задач БПЛА могут относится:
- цифровая фотокамера (видеокамера)
-тепловизор
-ИК-камера
- радиолакационное

Слайд 15Выводы:
Усовершенствование данной мультироторной БАС по приведенным выше параметрам, дадут удобность эксплуатации и
Выводы:
Усовершенствование данной мультироторной БАС по приведенным выше параметрам, дадут удобность эксплуатации и
Слайд 16Спасибо за внимание
Спасибо за внимание





 «Развитие мелкой моторики »
«Развитие мелкой моторики » Методика работы над рисованием головы человека
Методика работы над рисованием головы человека Презентация на тему Интарсия
Презентация на тему Интарсия  Весенние цветы - презентация к уроку Технологии_
Весенние цветы - презентация к уроку Технологии_ Тема: Кукла – народная игрушка. Исполнитель: Яицкая Оксана Руководитель: Ревтова Ольга Николаевна
Тема: Кукла – народная игрушка. Исполнитель: Яицкая Оксана Руководитель: Ревтова Ольга Николаевна Презентация на тему Конструкторский этап проекта
Презентация на тему Конструкторский этап проекта  Изумительные цветы из гофрированной бумаги!!!
Изумительные цветы из гофрированной бумаги!!! Презентация на тему Холодные блюда и закуски стран мира
Презентация на тему Холодные блюда и закуски стран мира  Презентация на тему Первичная обработка рыбы
Презентация на тему Первичная обработка рыбы  Презентация на тему Фуршетные фантазии
Презентация на тему Фуршетные фантазии  Урок по технологии Горшовой Елены Михайловны г.Александровск-Сахалинский МБОУ СОШ № 6 на тему: «Изучение свойств нитей основы и у
Урок по технологии Горшовой Елены Михайловны г.Александровск-Сахалинский МБОУ СОШ № 6 на тему: «Изучение свойств нитей основы и у Презентация на тему Русский каравай
Презентация на тему Русский каравай  Винт
Винт “Основні операції виконання простої штукатурки”
“Основні операції виконання простої штукатурки” Как выжечь свой портрет Эта работа вызывает живейший интерес у шестиклассников . Ранее мы выжигали портреты писателей и поэтов, но
Как выжечь свой портрет Эта работа вызывает живейший интерес у шестиклассников . Ранее мы выжигали портреты писателей и поэтов, но Искусство архитектуры
Искусство архитектуры Системы геодезических координат Глобальные Государственные Местные
Системы геодезических координат Глобальные Государственные Местные КРУГЛЫЙ СТОЛ «САДОВОД – САДОВОДУ»
КРУГЛЫЙ СТОЛ «САДОВОД – САДОВОДУ» Презентация на тему Изготовление выкроек (5 класс)
Презентация на тему Изготовление выкроек (5 класс)  ТЕПЛОІЗОЛЯЦІЙНІ МАТЕРІАЛИ
ТЕПЛОІЗОЛЯЦІЙНІ МАТЕРІАЛИ «Оригами - геометрический материал как средство развития пространственного мышления младших школьников». г.о. Тольятти Автозаво
«Оригами - геометрический материал как средство развития пространственного мышления младших школьников». г.о. Тольятти Автозаво Караловые ветки с воска Коралловые ветки. Уж очень мне понравилось, и делать совсем несложно! Смотрите сами...
Караловые ветки с воска Коралловые ветки. Уж очень мне понравилось, и делать совсем несложно! Смотрите сами... Социальная профилактика
Социальная профилактика Презентация на тему Работа с фольгой
Презентация на тему Работа с фольгой  Презентация на тему Секреты пластилина. Котенок
Презентация на тему Секреты пластилина. Котенок  ВПРОВАДЖЕННЯ ТЕХНОЛОГІЇ НАВЧАННЯ У СПІВПРАЦІ В НАВЧАЛЬНИЙ ПРОЦЕС
ВПРОВАДЖЕННЯ ТЕХНОЛОГІЇ НАВЧАННЯ У СПІВПРАЦІ В НАВЧАЛЬНИЙ ПРОЦЕС Торцовка. Цветочек - презентация к уроку Технологии_
Торцовка. Цветочек - презентация к уроку Технологии_ Презентация на тему Обрезка плодовых деревьев
Презентация на тему Обрезка плодовых деревьев