ДИНАМИЧЕСКАЯ СЕГМЕНТАЦИЯ ПРОСТРАНСТВА ПРИЗНАКОВ ДЛЯ СИСТЕМ АВТОНОМНОГО АДАПТИВНОГО УПРАВЛЕНИЯ И СИСТЕМ ОБУЧЕНИЯ С ПОДКРЕПЛЕНИЕ
- ДИНАМИЧЕСКАЯ СЕГМЕНТАЦИЯ ПРОСТРАНСТВА ПРИЗНАКОВ ДЛЯ СИСТЕМ АВТОНОМНОГО АДАПТИВНОГО УПРАВЛЕНИЯ И СИСТЕМ ОБУЧЕНИЯ С ПОДКРЕПЛЕНИЕ

Содержание
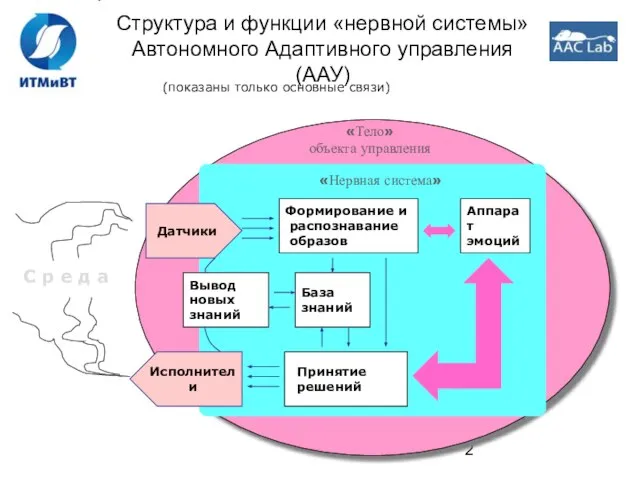
- 2. Структура и функции «нервной системы» Автономного Адаптивного управления (ААУ)
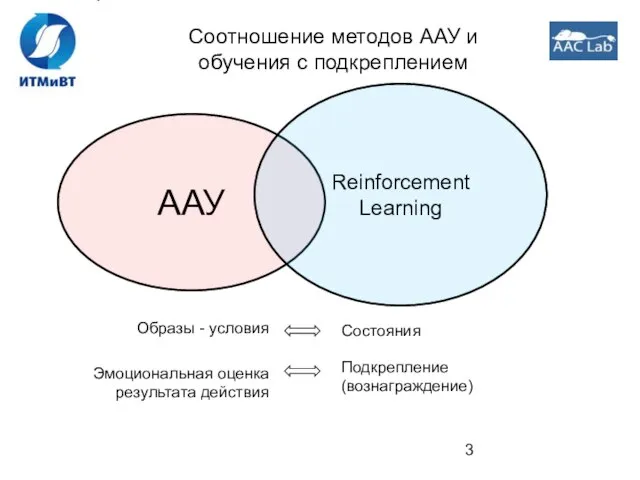
- 3. Соотношение методов ААУ и обучения с подкреплением Образы - условия Эмоциональная оценка результата действия ААУ Reinforcement
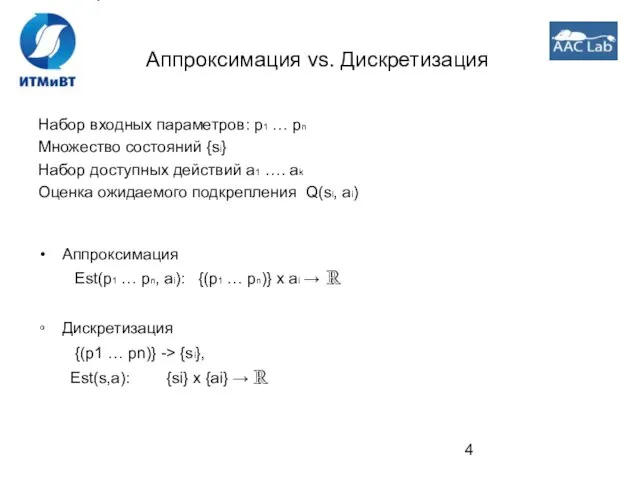
- 4. Аппроксимация vs. Дискретизация Набор входных параметров: p1 … pn Множество состояний {si} Набор доступных действий a1
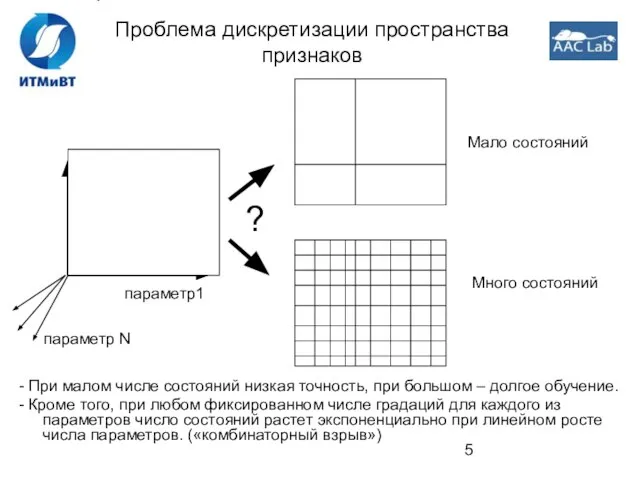
- 5. Проблема дискретизации пространства признаков - При малом числе состояний низкая точность, при большом – долгое обучение.
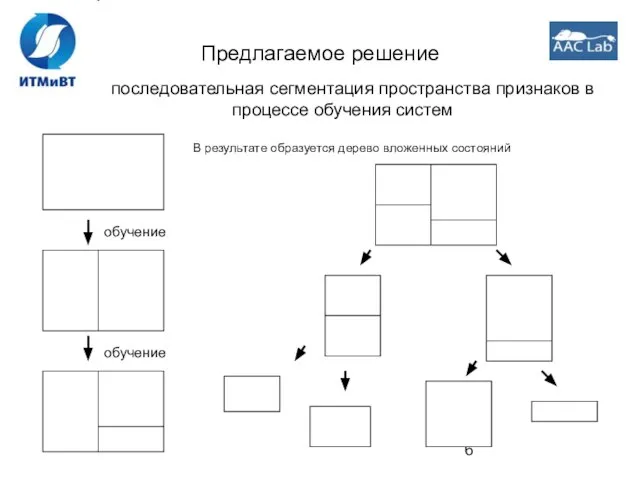
- 6. Предлагаемое решение последовательная сегментация пространства признаков в процессе обучения систем В результате образуется дерево вложенных состояний
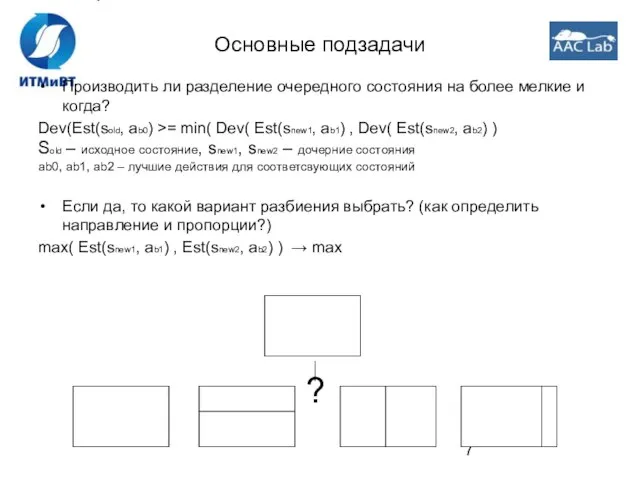
- 7. Основные подзадачи Производить ли разделение очередного состояния на более мелкие и когда? Dev(Est(sold, ab0) >= min(
- 8. Свойства разработанного метода Итоговое разбиение пространства признаков на состояния неравномерно и отвечает специфике конкретной задачи. Определенное
- 9. Экспериментальное исследование Экспериментальное исследование разработанного метода проводилось на компьютерной и на физической модели наноспутника с адаптивной
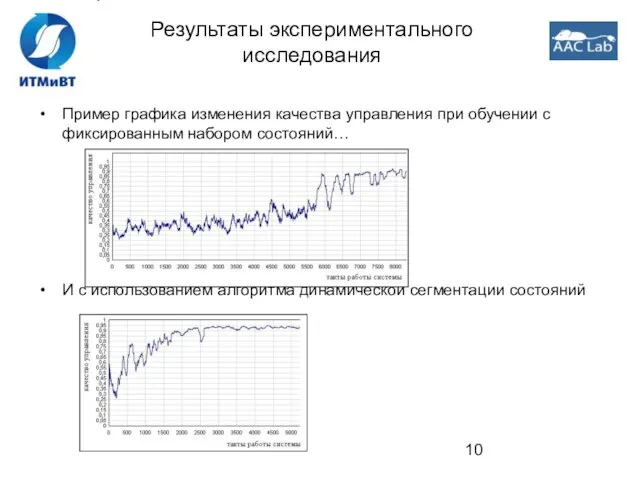
- 10. Результаты экспериментального исследования Пример графика изменения качества управления при обучении с фиксированным набором состояний… И с
- 12. Скачать презентацию
Слайд 3Соотношение методов ААУ и
обучения с подкреплением
Образы - условия
Эмоциональная оценка результата
Соотношение методов ААУ и
обучения с подкреплением
Образы - условия
Эмоциональная оценка результата
Слайд 4Аппроксимация vs. Дискретизация
Набор входных параметров: p1 … pn
Множество состояний {si}
Набор доступных действий
Аппроксимация vs. Дискретизация
Набор входных параметров: p1 … pn
Множество состояний {si}
Набор доступных действий
Слайд 5Проблема дискретизации пространства признаков
- При малом числе состояний низкая точность, при большом
Проблема дискретизации пространства признаков
- При малом числе состояний низкая точность, при большом
Слайд 6Предлагаемое решение
последовательная сегментация пространства признаков в процессе обучения систем
В результате
Предлагаемое решение
последовательная сегментация пространства признаков в процессе обучения систем
В результате
Слайд 7Основные подзадачи
Производить ли разделение очередного состояния на более мелкие и когда?
Dev(Est(sold, ab0)
Основные подзадачи
Производить ли разделение очередного состояния на более мелкие и когда?
Dev(Est(sold, ab0)
Слайд 8Свойства разработанного метода
Итоговое разбиение пространства признаков на состояния неравномерно и отвечает специфике
Свойства разработанного метода
Итоговое разбиение пространства признаков на состояния неравномерно и отвечает специфике
Слайд 9Экспериментальное исследование
Экспериментальное исследование разработанного метода проводилось на компьютерной и на физической модели
Экспериментальное исследование
Экспериментальное исследование разработанного метода проводилось на компьютерной и на физической модели

Слайд 10Результаты экспериментального исследования
Пример графика изменения качества управления при обучении с фиксированным набором
Результаты экспериментального исследования
Пример графика изменения качества управления при обучении с фиксированным набором
 ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя
ИТС ПРОФ - профессиональная информационная система для бухгалтераи руководителя EasyMani
EasyMani Pepsi - участник фестиваля Пикник Афиша
Pepsi - участник фестиваля Пикник Афиша Именины Загоскина М.Н
Именины Загоскина М.Н Исаак Бабель
Исаак Бабель В некотором царстве,В некотором государстве,вернее в ТюрлемеЖивет своей жизнью
В некотором царстве,В некотором государстве,вернее в ТюрлемеЖивет своей жизнью Памятники Гоголю
Памятники Гоголю Правила безопасного обращения с бытовыми электроприборами
Правила безопасного обращения с бытовыми электроприборами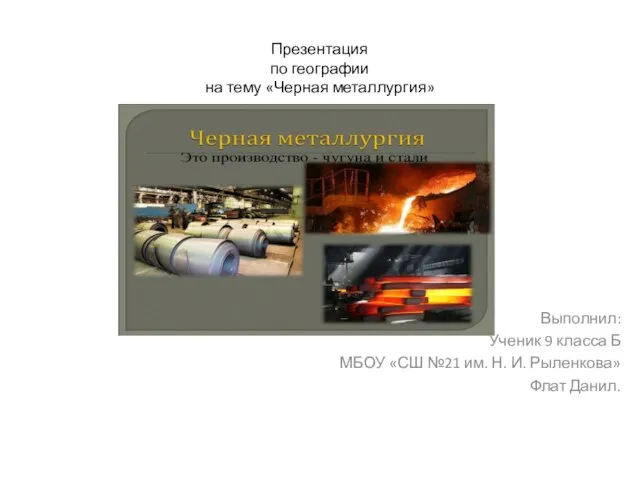 Черная металлургия
Черная металлургия Психолого-педагогическая диагностика
Психолого-педагогическая диагностика Рукописные книги
Рукописные книги Использование приёмов технологии развития критического мышления при написании части «С».
Использование приёмов технологии развития критического мышления при написании части «С». МЕДИЦИНСКАЯ И БИОЛОГИЧЕСКАЯ ФИЗИКА
МЕДИЦИНСКАЯ И БИОЛОГИЧЕСКАЯ ФИЗИКА Передача жилых домов в управление
Передача жилых домов в управление Aleksander Sergeevich PUSHKIN 1799-1837
Aleksander Sergeevich PUSHKIN 1799-1837 Сергей Александрович Есенин.(1895-1925)
Сергей Александрович Есенин.(1895-1925) Презентация на тему "Будни и праздники 5 класса" - скачать презентации по Педагогике
Презентация на тему "Будни и праздники 5 класса" - скачать презентации по Педагогике Эпоха возрождения
Эпоха возрождения Интуитивные решения. Интуитивное мышление
Интуитивные решения. Интуитивное мышление Ведение реестра организаций отдыха детей и их оздоровления , расположенных на территории Свердловской области
Ведение реестра организаций отдыха детей и их оздоровления , расположенных на территории Свердловской области экстр пси ДПО
экстр пси ДПО Профессии в области хореографии
Профессии в области хореографии Изменение величин
Изменение величин Поведение во время грозы
Поведение во время грозы Тайна бумажного листа
Тайна бумажного листа Воспитательная программа «Любознайки»
Воспитательная программа «Любознайки» Век Просвещения
Век Просвещения Проблемный метод обученияв преподавании истории
Проблемный метод обученияв преподавании истории