Царева Алина Александровна Кинематическое и динамическое моделирование плоских механизмов в системе Mathematica Руководитель: канд
- Царева Алина Александровна Кинематическое и динамическое моделирование плоских механизмов в системе Mathematica Руководитель: канд

Содержание
- 2. Содержание Актуальность. Поставленные цели. Объект и предмет исследования. Научная гипотеза. Основные результаты. Научная новизна. Положения, выносимые
- 3. Актуальность Одной из фундаментальных наиболее сложных и дисциплин, изучаемых студентами многих вузов, является теоретическая механика. При
- 4. Поставленные цели создание математических моделей основных задач механики, кинематических и динамических моделей плоских механизмов; расчет и
- 5. Объект и предмет исследования Объектом исследования являются кинематические и динамические характеристики плоских механизмов, математическое моделирование, а
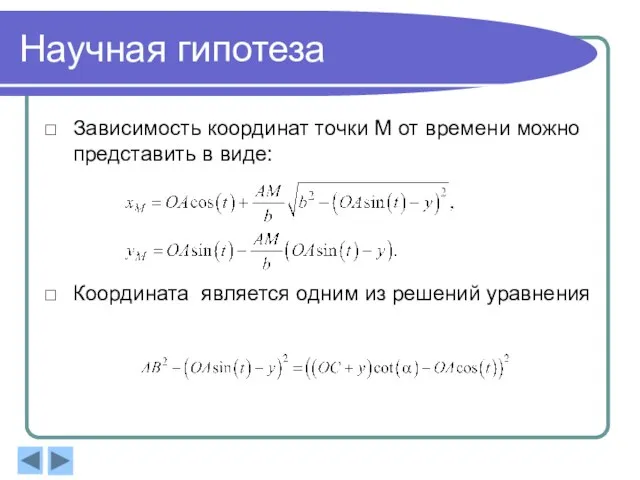
- 6. Научная гипотеза Зависимость координат точки М от времени можно представить в виде: Координата является одним из
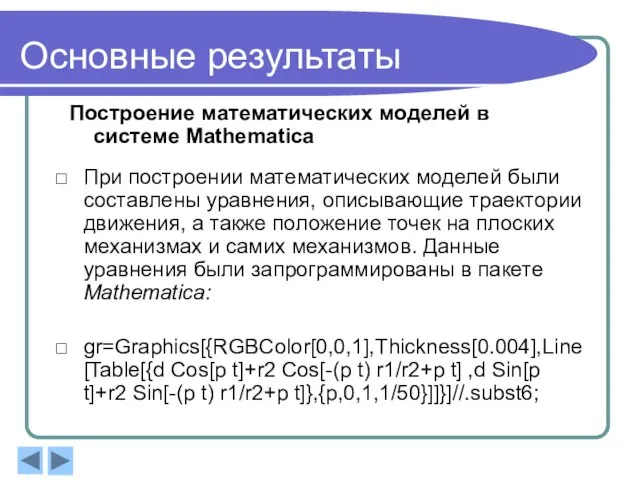
- 7. Основные результаты Построение математических моделей в системе Mathematica При построении математических моделей были составлены уравнения, описывающие
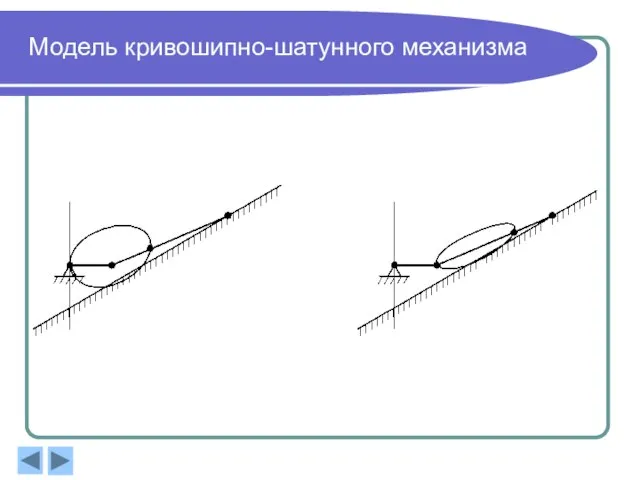
- 8. Анимация движения и построение траекторий выполняются на основании кинематических уравнений, описывающих зависимость координат характерных точек механизмов
- 9. Модель кривошипно-шатунного механизма
- 10. Генерация индивидуальных заданий Содержание учебного комплекса составляют текстовые ячейки с формулировкой постановки задачи, а также кнопки
- 11. Научная новизна Построены кинематические и динамические модели плоских механизмов
- 12. Основные положения, выносимые на защиту Кинематическое и динамическое моделирование плоских механизмов создание математических моделей основных задач
- 14. Скачать презентацию
Слайд 2Содержание
Актуальность.
Поставленные цели.
Объект и предмет исследования.
Научная гипотеза.
Основные результаты.
Научная новизна.
Положения, выносимые на защиту.
Содержание
Актуальность.
Поставленные цели.
Объект и предмет исследования.
Научная гипотеза.
Основные результаты.
Научная новизна.
Положения, выносимые на защиту.
Слайд 3Актуальность
Одной из фундаментальных наиболее сложных и дисциплин, изучаемых студентами многих вузов, является
Актуальность
Одной из фундаментальных наиболее сложных и дисциплин, изучаемых студентами многих вузов, является
Слайд 4Поставленные цели
создание математических моделей основных задач механики, кинематических и динамических моделей плоских
Поставленные цели
создание математических моделей основных задач механики, кинематических и динамических моделей плоских
Слайд 5Объект и предмет исследования
Объектом исследования являются кинематические и динамические характеристики плоских механизмов,
Объект и предмет исследования
Объектом исследования являются кинематические и динамические характеристики плоских механизмов,
Слайд 6Научная гипотеза
Зависимость координат точки М от времени можно представить в виде:
Координата является
Научная гипотеза
Зависимость координат точки М от времени можно представить в виде:
Координата является
Слайд 7Основные результаты
Построение математических моделей в системе Mathematica
При построении математических моделей были составлены
Основные результаты
Построение математических моделей в системе Mathematica
При построении математических моделей были составлены
Слайд 8Анимация движения и построение траекторий выполняются на основании кинематических уравнений, описывающих зависимость
Анимация движения и построение траекторий выполняются на основании кинематических уравнений, описывающих зависимость
Слайд 9Модель кривошипно-шатунного механизма
Модель кривошипно-шатунного механизма
Слайд 10Генерация индивидуальных заданий
Содержание учебного комплекса составляют текстовые ячейки с формулировкой постановки задачи,
Генерация индивидуальных заданий
Содержание учебного комплекса составляют текстовые ячейки с формулировкой постановки задачи,
Слайд 11Научная новизна
Построены кинематические и динамические модели плоских механизмов
Научная новизна
Построены кинематические и динамические модели плоских механизмов
Слайд 12Основные положения, выносимые на защиту
Кинематическое и динамическое моделирование плоских механизмов
создание математических
Основные положения, выносимые на защиту
Кинематическое и динамическое моделирование плоских механизмов
создание математических
 Противовоспалительные средства
Противовоспалительные средства Правовое регулирование вопросов качества лекарственных средств в Российской Федерации
Правовое регулирование вопросов качества лекарственных средств в Российской Федерации СТАТИСТИЧЕСКИЕ ПОКАЗАТЕЛИ И ВЕЛИЧИНЫ
СТАТИСТИЧЕСКИЕ ПОКАЗАТЕЛИ И ВЕЛИЧИНЫ Путешествие в мир лекарственных растений
Путешествие в мир лекарственных растений Красивые рыбы. Монотипия
Красивые рыбы. Монотипия Future inventions. Cooling and dryness of the armpits
Future inventions. Cooling and dryness of the armpits Презентация на тему Раскрытие скобок
Презентация на тему Раскрытие скобок Здоровьесберегающие технологии в начальной школе
Здоровьесберегающие технологии в начальной школе Темперамент личности
Темперамент личности Введение в социальную психологию
Введение в социальную психологию Конституция России
Конституция России Теория деятельности и деятельностный подход А. Н. Леонтьева
Теория деятельности и деятельностный подход А. Н. Леонтьева Однородные члены предложения
Однородные члены предложения Кругошкольное путешествие
Кругошкольное путешествие Волинський національний університет імені Лесі Українки, Географічний факультет
Волинський національний університет імені Лесі Українки, Географічний факультет Возрастная психология
Возрастная психология Презентация на тему Страна городов (4 класс)
Презентация на тему Страна городов (4 класс) РАО «ЕЭС России»: Новая Энергетическая Политика
РАО «ЕЭС России»: Новая Энергетическая Политика Автоматика судовых энергетических установок и вспомогательных механизмов
Автоматика судовых энергетических установок и вспомогательных механизмов Диаграмма
Диаграмма Финансовый рынок
Финансовый рынок Видеосерверы многоканальной «полицейской» записи ТВ- и радиоэфира
Видеосерверы многоканальной «полицейской» записи ТВ- и радиоэфира Конвенции о защите прав человека в судах РФ
Конвенции о защите прав человека в судах РФ Итоги работы в рамках направления «Сайты общеобразовательных учреждений Томской области» за период январь-июнь 2009 года
Итоги работы в рамках направления «Сайты общеобразовательных учреждений Томской области» за период январь-июнь 2009 года Презентация на тему Саммит ШОС и стран БРИКС
Презентация на тему Саммит ШОС и стран БРИКС Опыт разграничения компетенции и ответственности между отделами ИС, ТО, РСиБИ и аутсорсером в УФК по Брянской области Нач. отдела
Опыт разграничения компетенции и ответственности между отделами ИС, ТО, РСиБИ и аутсорсером в УФК по Брянской области Нач. отдела  ВСК Страховой дом. Актуальность страхования аквакультуры в России
ВСК Страховой дом. Актуальность страхования аквакультуры в России Игра Самый умный
Игра Самый умный