- АДАПТИВНОЕ УПРАВЛЕНИЕС ИДЕНТИФИКАЦИЕЙ

Содержание
- 2. Введение В адаптивных системах обработки информации и управления происходит приспособление к изменяющимся условиям и неизвестным характеристикам
- 3. Постановка задачи адаптивного управления Рассматриваем адаптивную систему с идентификацией (АСИ). Синтезируем алгоритм расчета управления (алгоритм работы
- 4. Примеры синтеза устройств управления для простейших линейных систем Формируем модель объекта: Пример 1. Считаем, что объект
- 5. Примеры синтеза устройств управления для простейших линейных систем Модель объекта: Пример 2. Объект описывается уравнением: Параметры:
- 6. Синтез алгоритмов управления для линейных систем Объект:
- 7. Алгоритмы адаптивного управления для нелинейных систем Объект описывается нелинейным разностным уравнением:
- 8. Управление динамическими системами с чистыми запаздываниями Рассматриваем объект, описываемый разностным уравнением: Строим модель объекта: Выход модели
- 10. Скачать презентацию
Слайд 2Введение
В адаптивных системах обработки информации и управления происходит приспособление к изменяющимся
Введение
В адаптивных системах обработки информации и управления происходит приспособление к изменяющимся

Слайд 3Постановка задачи адаптивного управления
Рассматриваем адаптивную систему с идентификацией (АСИ). Синтезируем алгоритм
Постановка задачи адаптивного управления
Рассматриваем адаптивную систему с идентификацией (АСИ). Синтезируем алгоритм

Слайд 4Примеры синтеза устройств управления
для простейших линейных систем
Формируем модель объекта:
Пример 1. Считаем,
Примеры синтеза устройств управления
для простейших линейных систем
Формируем модель объекта:
Пример 1. Считаем,

Слайд 5Примеры синтеза устройств управления
для простейших линейных систем
Модель объекта:
Пример 2. Объект описывается
Примеры синтеза устройств управления
для простейших линейных систем
Модель объекта:
Пример 2. Объект описывается

Слайд 6Синтез алгоритмов управления для линейных систем
Объект:
Синтез алгоритмов управления для линейных систем
Объект:

Слайд 7Алгоритмы адаптивного управления
для нелинейных систем
Объект описывается нелинейным разностным уравнением:
Алгоритмы адаптивного управления
для нелинейных систем
Объект описывается нелинейным разностным уравнением:

Слайд 8Управление динамическими системами
с чистыми запаздываниями
Рассматриваем объект, описываемый разностным уравнением:
Строим модель
Управление динамическими системами
с чистыми запаздываниями
Рассматриваем объект, описываемый разностным уравнением:
Строим модель

 Литературная прогулка по Воронежу
Литературная прогулка по Воронежу Развитие информационно-образовательной среды ОУ
Развитие информационно-образовательной среды ОУ Ноутбуки. Устройство ноутбука
Ноутбуки. Устройство ноутбука Геометрия в архитектуре
Геометрия в архитектуре Его величество театр
Его величество театр Життя і діляльність Л. Грабовського
Життя і діляльність Л. Грабовського Giant's Causeway
Giant's Causeway Презентация на тему Реальные газы и жидкости и твердые тела
Презентация на тему Реальные газы и жидкости и твердые тела Українська мова Повторюємо синоніми та антоніми Синоніми
Українська мова Повторюємо синоніми та антоніми Синоніми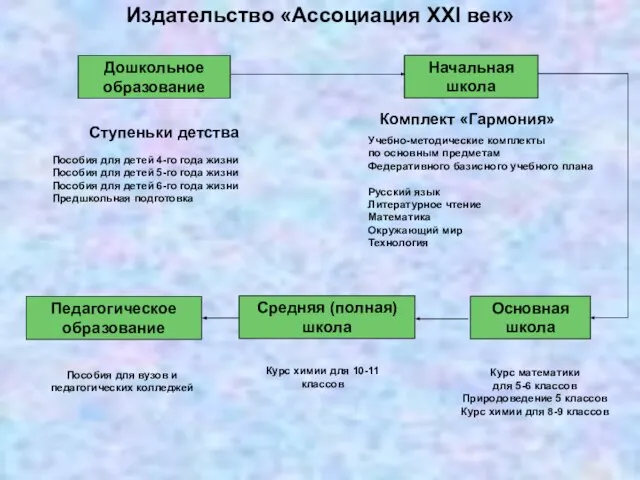 Издательство «Ассоциация XXI век»
Издательство «Ассоциация XXI век» Структура, содержание и методическое обеспечение комплексного учебного курса «Основы религиозных культур и светской этики»
Структура, содержание и методическое обеспечение комплексного учебного курса «Основы религиозных культур и светской этики» Кибербуллинг
Кибербуллинг Агитационное искусство периода Первой мировой войны
Агитационное искусство периода Первой мировой войны Основные понятия теории информации
Основные понятия теории информации  Проектная идея многофункциональной площадки для подростков
Проектная идея многофункциональной площадки для подростков Діагностика психологічної біографії номотетичними методами
Діагностика психологічної біографії номотетичними методами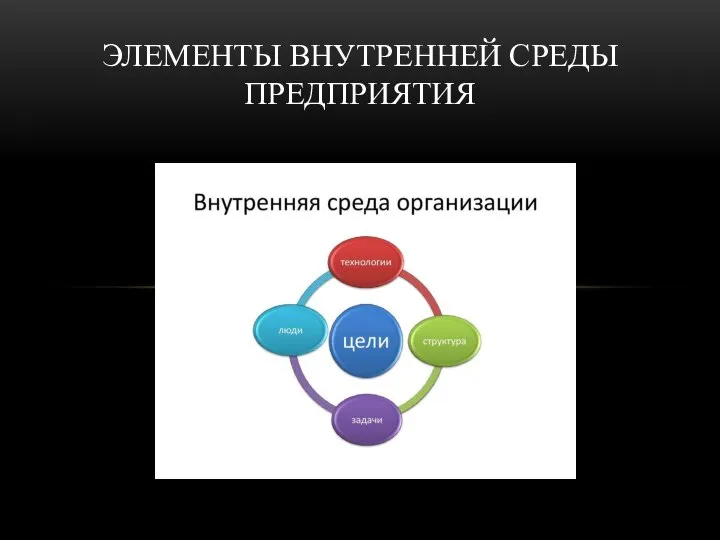 Элементы внутренней среды предприятия
Элементы внутренней среды предприятия Презентация на тему Диагностика предметной обученности
Презентация на тему Диагностика предметной обученности ТОВ МТРК Чернівці. Відеосюжет інформаційно-рекламного наповнення Знай наших
ТОВ МТРК Чернівці. Відеосюжет інформаційно-рекламного наповнення Знай наших Катеринин хлебушек
Катеринин хлебушек Рельеф Южной Америки
Рельеф Южной Америки ПОЛИТИЧЕСКИЕ ЭЛИТЫ
ПОЛИТИЧЕСКИЕ ЭЛИТЫ Лучшее слово о дружбе
Лучшее слово о дружбе Бесплатные аналоги коммерческих программ для Windows
Бесплатные аналоги коммерческих программ для Windows Проэкт
Проэкт Выпускная квалификационная работа
Выпускная квалификационная работа Викторина по ПДД (5 класса)
Викторина по ПДД (5 класса) Правила поведения в школе и на улице
Правила поведения в школе и на улице