- Алгоритмы факторизации

Содержание
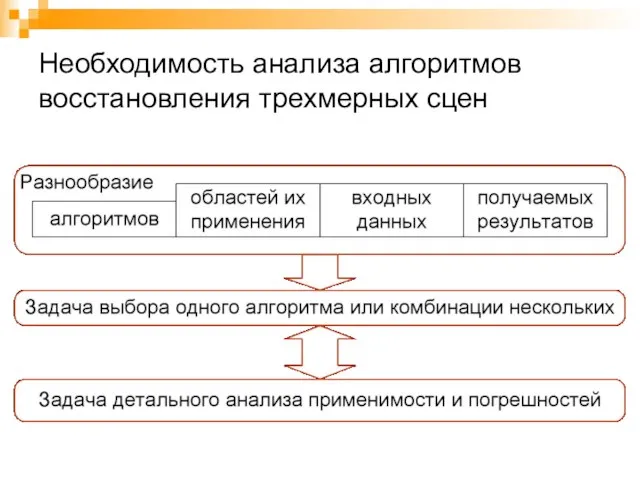
- 2. Необходимость анализа алгоритмов восстановления трехмерных сцен
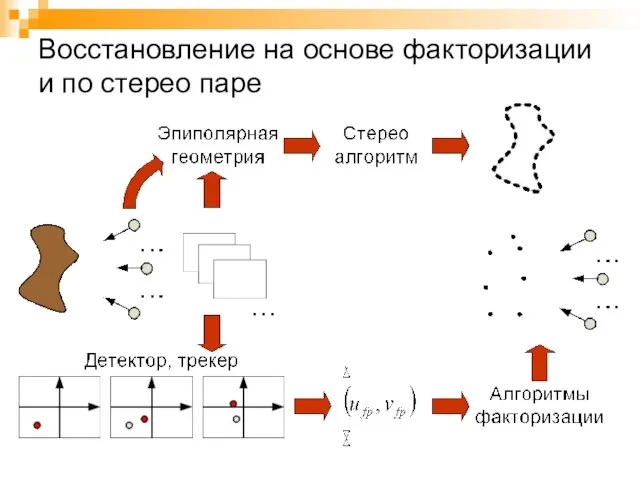
- 3. Восстановление на основе факторизации и по стерео паре
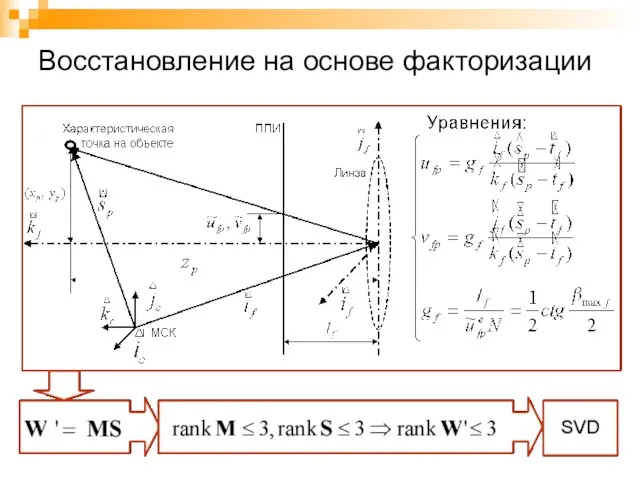
- 4. Восстановление на основе факторизации
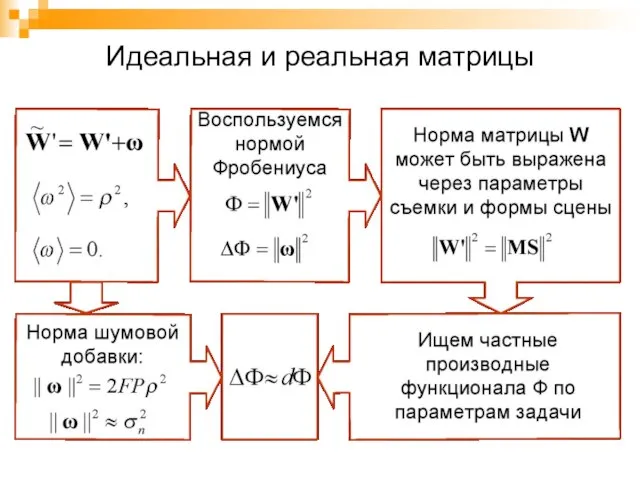
- 5. Идеальная и реальная матрицы
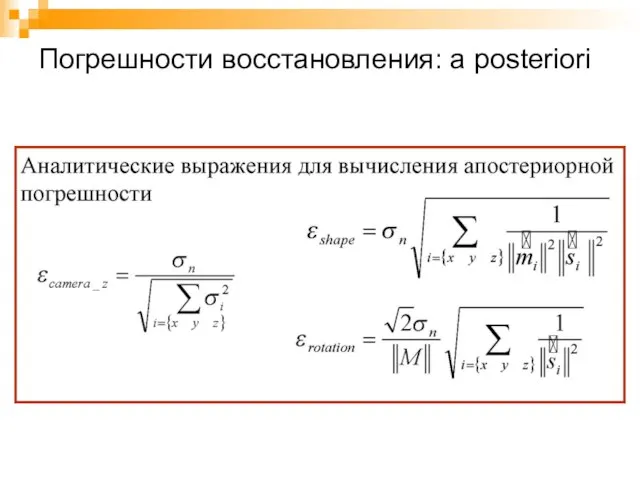
- 6. Погрешности восстановления: a posteriori
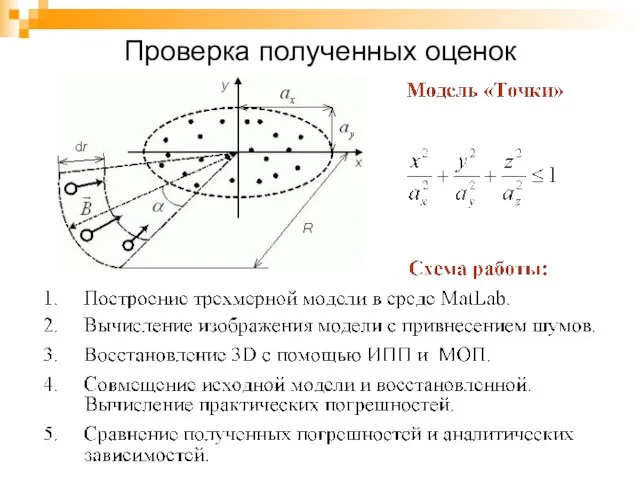
- 7. Проверка полученных оценок
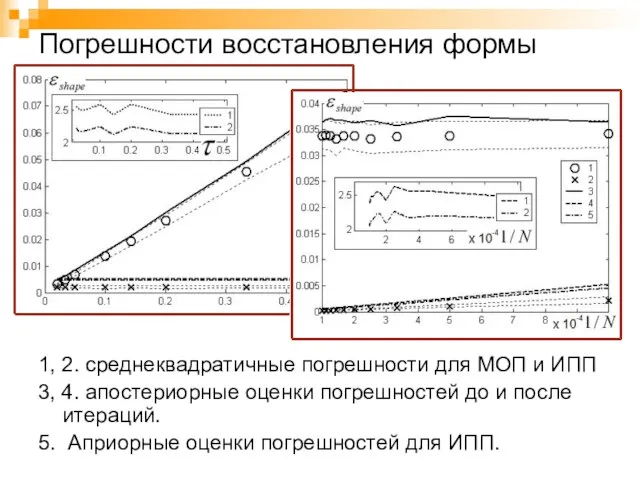
- 8. Погрешности восстановления формы 1, 2. среднеквадратичные погрешности для МОП и ИПП 3, 4. апостериорные оценки погрешностей
- 9. Погрешности восстановления ориентации
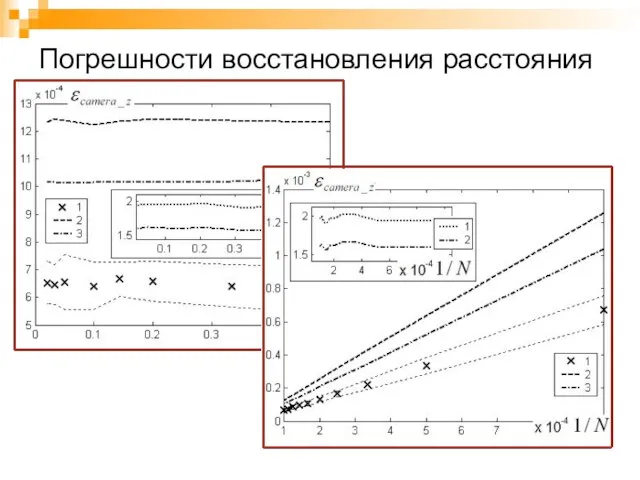
- 10. Погрешности восстановления расстояния
- 11. Применение полученных оценок погрешностей
- 12. Заключение Получены апостериорные оценки погрешностей алгоритмов, основанных на факторизации Апостериорные оценки могут быть переформулированы для априорного
- 14. Скачать презентацию
Слайд 3Восстановление на основе факторизации и по стерео паре
Восстановление на основе факторизации и по стерео паре
Слайд 4Восстановление на основе факторизации
Восстановление на основе факторизации
Слайд 5Идеальная и реальная матрицы
Идеальная и реальная матрицы
Слайд 6Погрешности восстановления: a posteriori
Погрешности восстановления: a posteriori
Слайд 7Проверка полученных оценок
Проверка полученных оценок
Слайд 8Погрешности восстановления формы
1, 2. среднеквадратичные погрешности для МОП и ИПП
3, 4. апостериорные
Погрешности восстановления формы
1, 2. среднеквадратичные погрешности для МОП и ИПП
3, 4. апостериорные
Слайд 9Погрешности восстановления ориентации
Погрешности восстановления ориентации

Слайд 10Погрешности восстановления расстояния
Погрешности восстановления расстояния
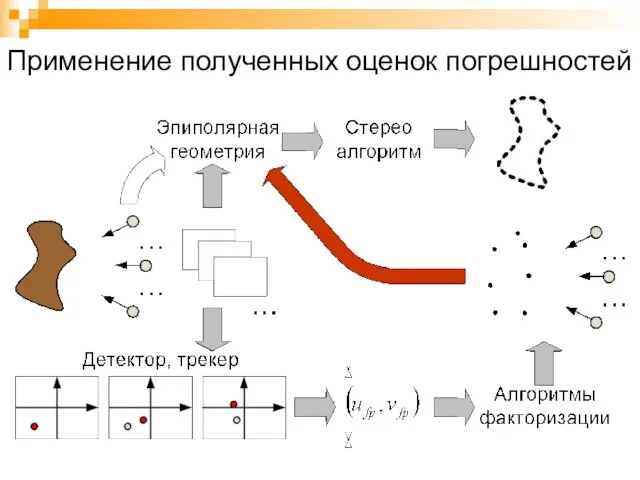
Слайд 11Применение полученных оценок погрешностей
Применение полученных оценок погрешностей
Слайд 12Заключение
Получены апостериорные оценки погрешностей алгоритмов, основанных на факторизации
Апостериорные оценки могут быть переформулированы
Заключение
Получены апостериорные оценки погрешностей алгоритмов, основанных на факторизации
Апостериорные оценки могут быть переформулированы
 Формирование жизненных проектов учащихся в условиях адаптивной сельской школы
Формирование жизненных проектов учащихся в условиях адаптивной сельской школы Сближение частиц материала при сушке
Сближение частиц материала при сушке Рыхлова Н.Н.
Рыхлова Н.Н. Исследовательская работа
Исследовательская работа Портрет Томаса Мора кисти Ганса Гольбейна Младшего
Портрет Томаса Мора кисти Ганса Гольбейна Младшего Леса умеренного пояса
Леса умеренного пояса Presentation Title
Presentation Title  Управление. Лекция 1
Управление. Лекция 1 Кристаллическая решетка
Кристаллическая решетка Йом-Кипур – День Искупления
Йом-Кипур – День Искупления Основные преимущества новой линейки OfficeServ Гибкость программирования станции Интегрированные VoIP возможности Организация беспров
Основные преимущества новой линейки OfficeServ Гибкость программирования станции Интегрированные VoIP возможности Организация беспров Презентация на тему Жизнь и творчество Горького
Презентация на тему Жизнь и творчество Горького Создание инновационно-образовательной модели внеурочной деятельностив гимназии в рамках апробации ФГОСНОО
Создание инновационно-образовательной модели внеурочной деятельностив гимназии в рамках апробации ФГОСНОО Презентация на тему История письменности
Презентация на тему История письменности  Презентация на тему Объёмы тел
Презентация на тему Объёмы тел Абсентеизм
Абсентеизм М.Горький «Детство»
М.Горький «Детство» Творчество. Первичная диагностика творческого проекта
Творчество. Первичная диагностика творческого проекта Белки - Строение и свойства
Белки - Строение и свойства 드라마와 함께 하는 한국어 수업 6강
드라마와 함께 하는 한국어 수업 6강 Большой театр 5 класс
Большой театр 5 класс Система инфракрасного отопления. Пленка электрическая на основе обогревателя ПЭН
Система инфракрасного отопления. Пленка электрическая на основе обогревателя ПЭН Open Source решения
Open Source решения Устный журнал
Устный журнал Когда появилась одежда?
Когда появилась одежда? Качество производственной деятельности объектов почтовой связи
Качество производственной деятельности объектов почтовой связи Особенности празднования Нового года в России
Особенности празднования Нового года в России Дробилки ударного действия. Машины для помола материалов. (Лекция №3)
Дробилки ударного действия. Машины для помола материалов. (Лекция №3)