- Анализ информации в изображении

Содержание
- 2. Бинарное изображение Пример изображения для обработки
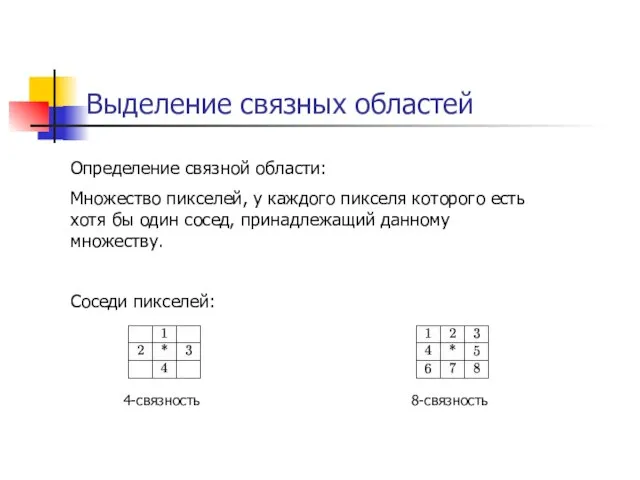
- 3. Выделение связных областей Определение связной области: Множество пикселей, у каждого пикселя которого есть хотя бы один
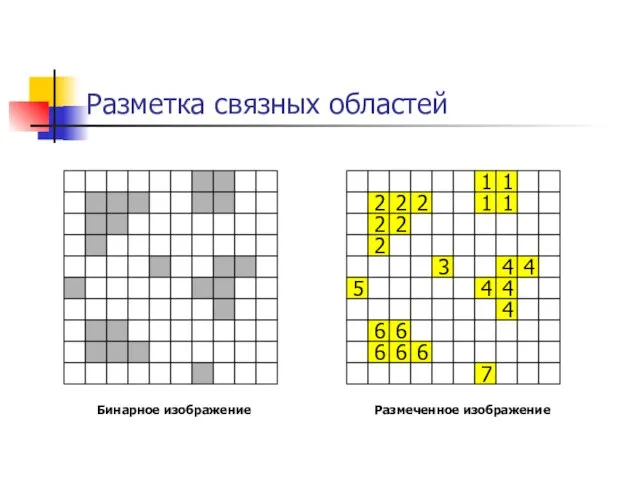
- 4. Разметка связных областей 1 1 2 2 2 1 1 2 2 2 3 4 4
- 5. Рекурсивная разметка связных областей 1 void Labeling(BIT* img[], int* labels[]) { // labels должна быть обнулена
- 6. Рекурсивная разметка связных областей 2 void Fill(BIT* img[], int* labels[], int x, int y, int L)
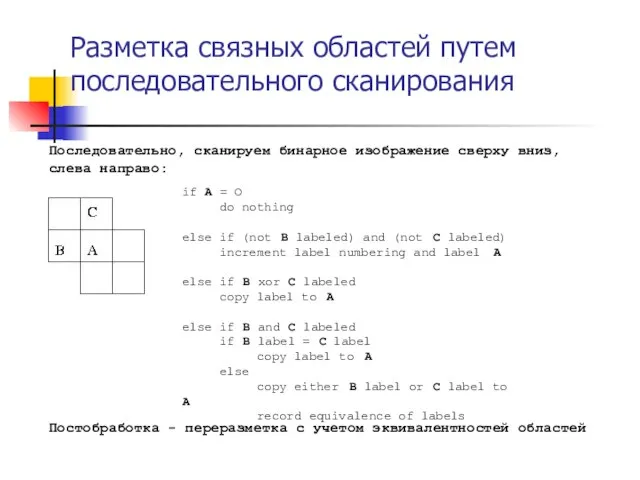
- 7. Разметка связных областей путем последовательного сканирования Последовательно, сканируем бинарное изображение сверху вниз, слева направо: if A
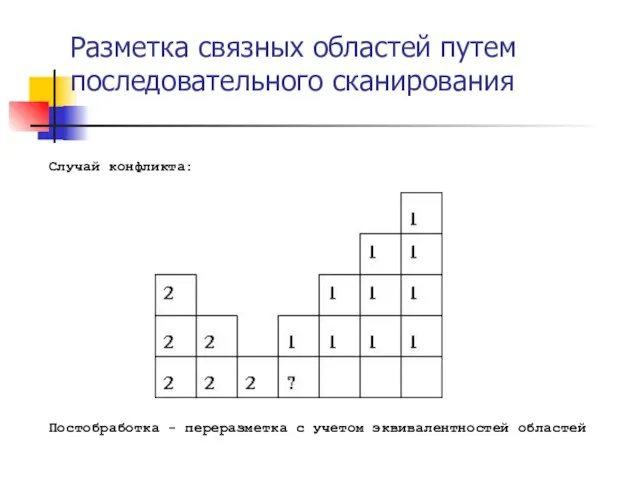
- 8. Разметка связных областей путем последовательного сканирования Случай конфликта: Постобработка - переразметка с учетом эквивалентностей областей
- 9. Анализ формы связных областей Для каждой области можно подсчитать некий набор простейших числовых характеристик: Площадь Периметр
- 10. Анализ формы связных областей Площадь – количество пикселей в области; Периметр – количество пикселей принадлежащих границе
- 11. Подсчет периметра области Пиксель лежит на границе области, если он сам принадлежит области и хотя бы
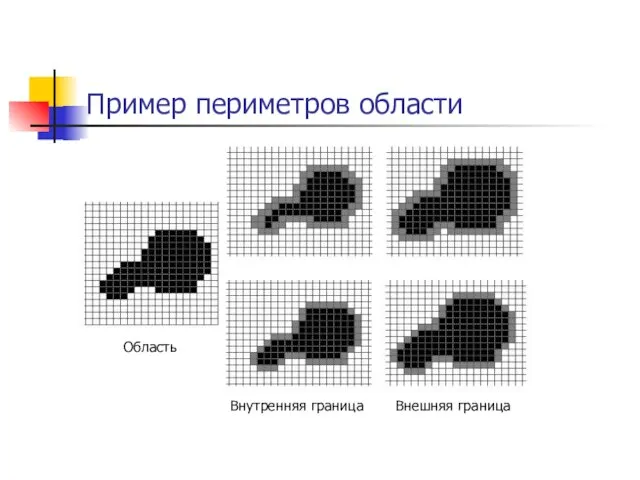
- 12. Пример периметров области Область Внутренняя граница Внешняя граница
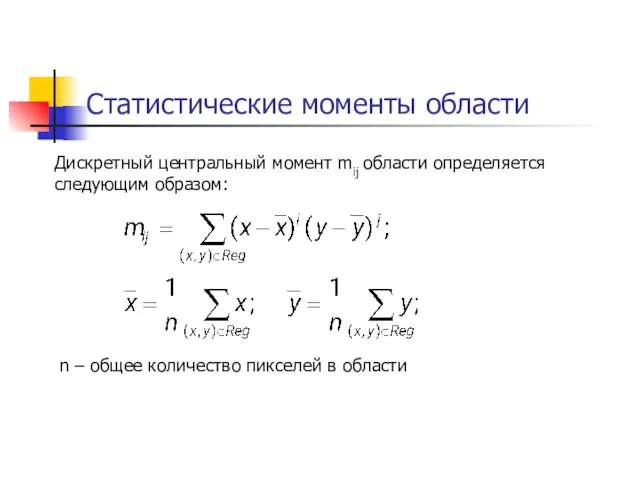
- 13. Статистические моменты области Дискретный центральный момент mij области определяется следующим образом: n – общее количество пикселей
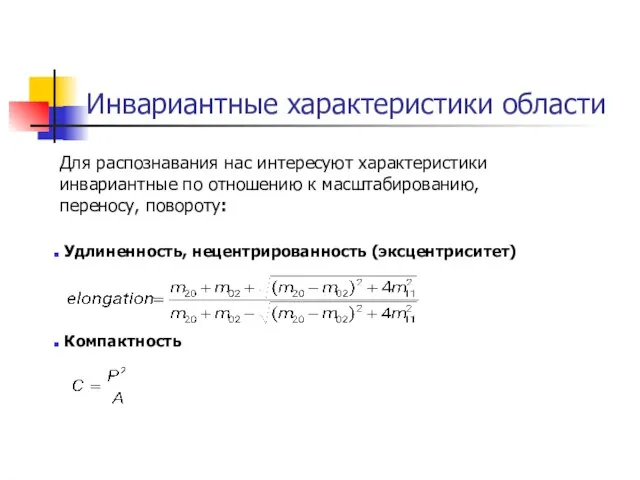
- 14. Инвариантные характеристики области Для распознавания нас интересуют характеристики инвариантные по отношению к масштабированию, переносу, повороту: Удлиненность,
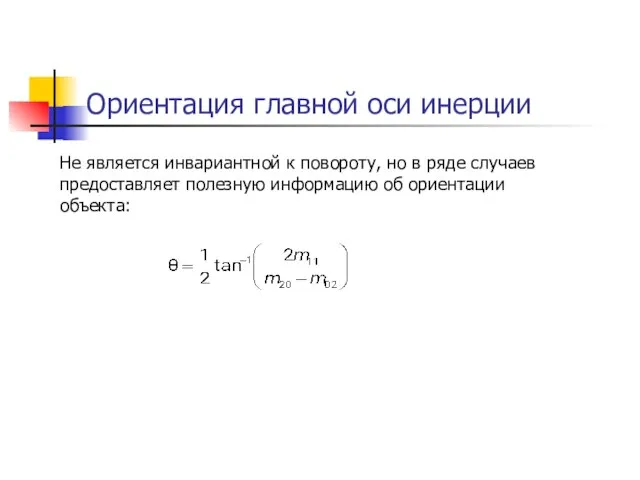
- 15. Ориентация главной оси инерции Не является инвариантной к повороту, но в ряде случаев предоставляет полезную информацию
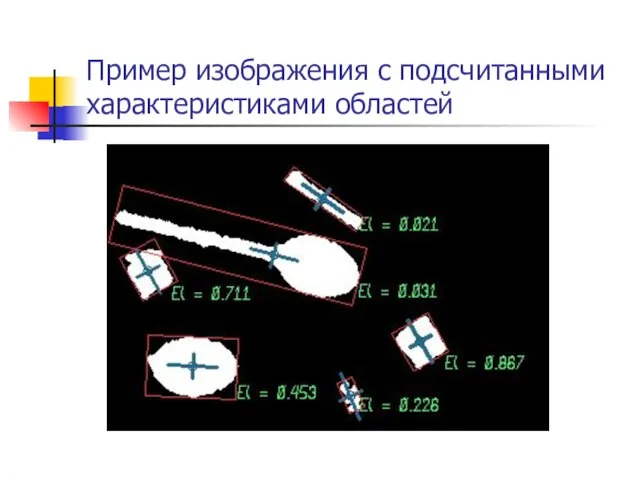
- 16. Пример изображения с подсчитанными характеристиками областей
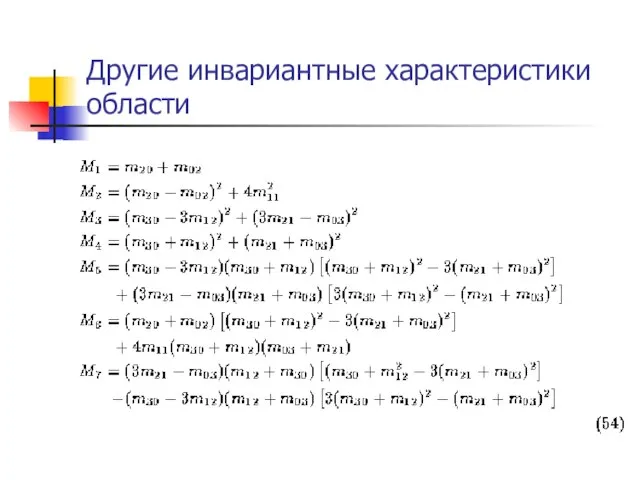
- 17. Другие инвариантные характеристики области
- 18. Перевод изображения в бинарное Простейший случай – выделение областей, яркость которых выше/ниже некоторого порога
- 19. Как автоматически вычислить порог? Сегментация изображения на области однородной яркости методом k-средних. Метод k-средних – метод
- 20. Алгоритм k-средних Дано: Набор векторов xi i=1,…,p; k – число кластеров, на которые нужно разбить набор
- 21. Алгоритм k-средних Случайным образом выбрать k средних mj j=1,…,k; Для каждого xi i=1,…,p подсчитать расстояние до
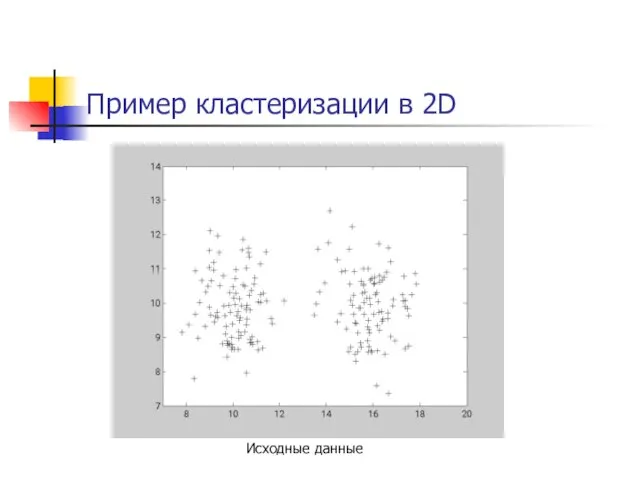
- 22. Пример кластеризации в 2D Исходные данные
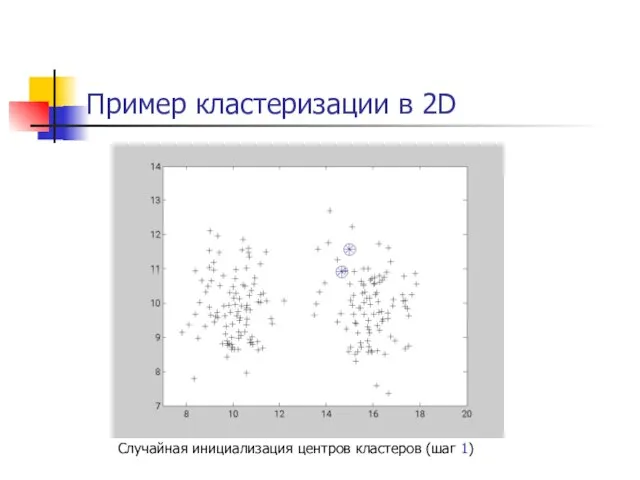
- 23. Пример кластеризации в 2D Случайная инициализация центров кластеров (шаг 1)
- 24. Пример кластеризации в 2D Кластеры после первой итерации (шаг 2)
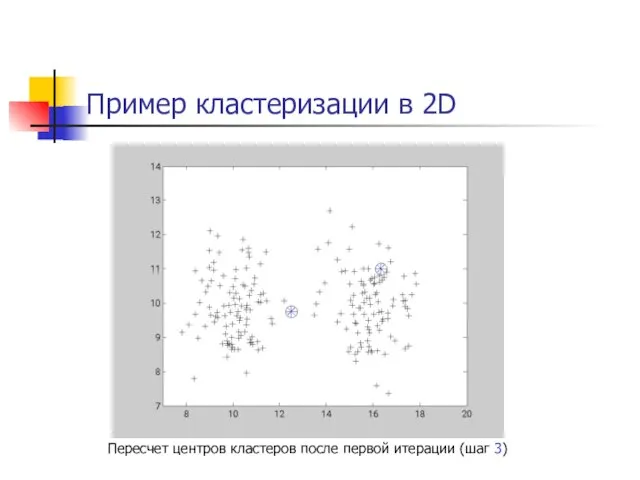
- 25. Пример кластеризации в 2D Пересчет центров кластеров после первой итерации (шаг 3)
- 26. Пример кластеризации в 2D Кластеры после второй итерации (шаг 2)
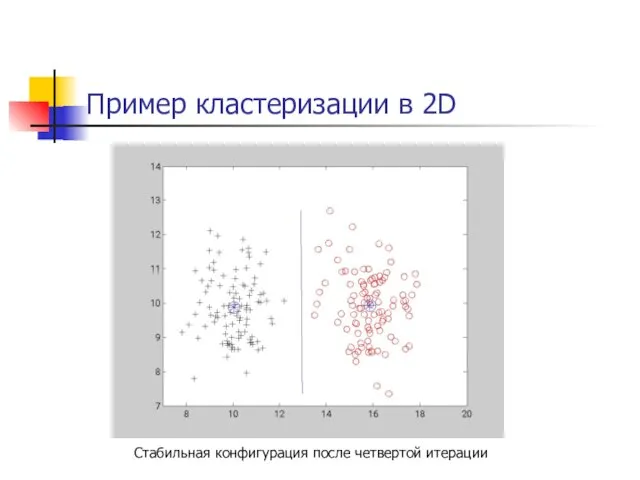
- 27. Пример кластеризации в 2D Стабильная конфигурация после четвертой итерации
- 28. Применение k-средних для сегментации изображений по яркости Рассматриваем одномерное пространство яркостей пикселей и производим в нем
- 29. Пример сегментации k = 2 k = 3
- 30. Сравнение k-средних с порогом по средней яркости После лекции был задан вопрос: чем отличается сегментация с
- 31. Преобразование Хафа (Hough) Преобразование Хафа позволяет находить на бинарном изображении плоские кривые, заданные параметрически, например: прямые,
- 32. Основная идея метода Рассмотрим семейство кривых на плоскости, заданное параметрическим уравнением: F(a1, a2, …, an, x,
- 33. Машинное представление Ввиду дискретности машинного представления и входных данных (изображения), требуется перевести непрерывное фазовое пространство в
- 34. Выделение прямых на изображении Прямую на плоскости можно задать следующим образом: x cosθ + y sinθ
- 35. Выделение прямых на изображении Таким образом функция, задающая семейство прямых, имеет вид: F (R, θ, x,
- 36. Изображение и фазовое пространство Через одну точку можно провести несколько прямых. Учитывая дискретность и введенную сетку,
- 37. Изображение и фазовое пространство Изображение с пятью точками интереса. Кривые в фазовом пространстве, соответствующие множеству прямых
- 38. Дискретизация фазового пространства Переводим непрерывное фазовое пространство в дискретное. Введем сетку на пространстве (R, θ), одной
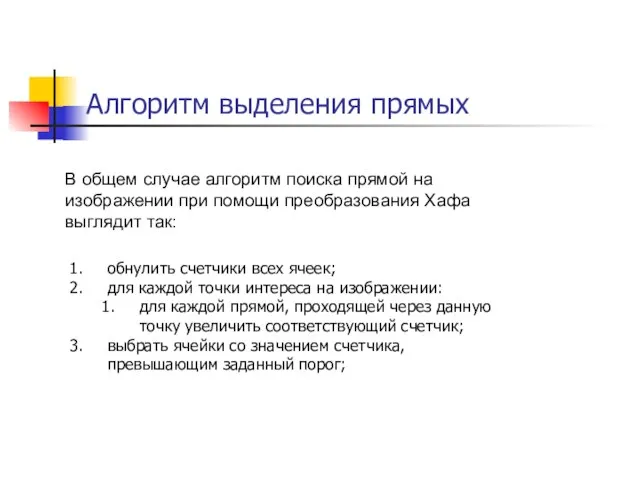
- 39. Алгоритм выделения прямых обнулить счетчики всех ячеек; для каждой точки интереса на изображении: для каждой прямой,
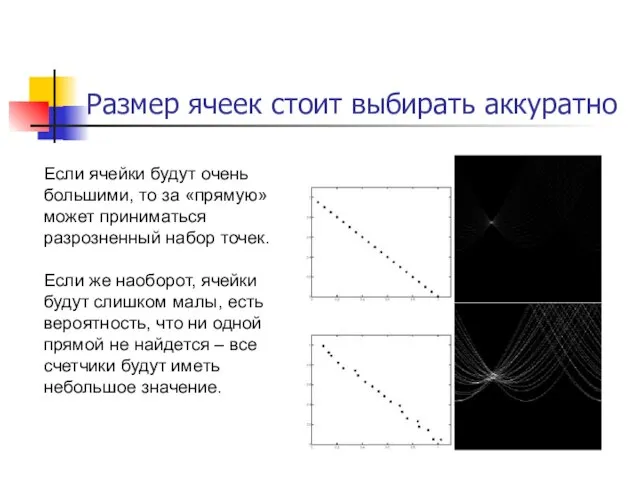
- 40. Размер ячеек стоит выбирать аккуратно Если ячейки будут очень большими, то за «прямую» может приниматься разрозненный
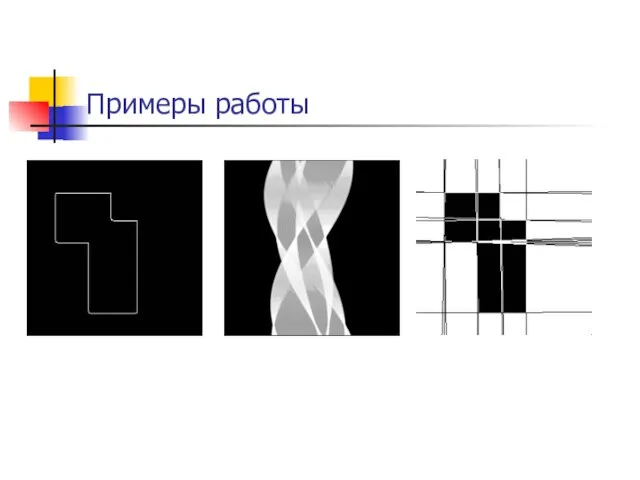
- 41. Примеры работы
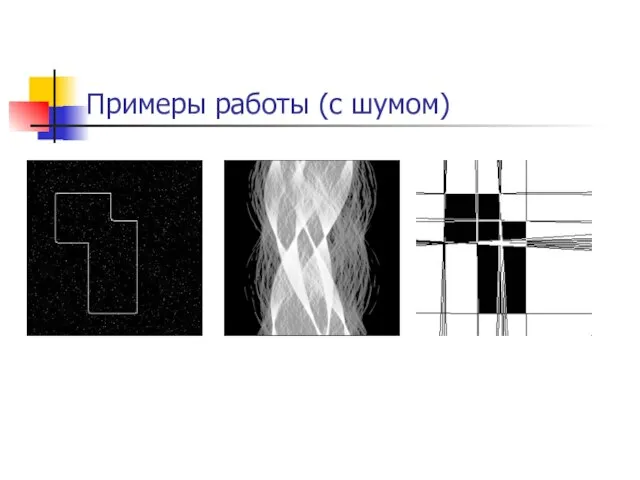
- 42. Примеры работы (с шумом)
- 44. Скачать презентацию

Слайд 3Выделение связных областей
Определение связной области:
Множество пикселей, у каждого пикселя которого есть хотя
Выделение связных областей
Определение связной области:
Множество пикселей, у каждого пикселя которого есть хотя
Слайд 4Разметка связных областей
1
1
2
2
2
1
1
2
2
2
3
4
4
5
4
4
4
6
6
6
6
6
7
Бинарное изображение
Размеченное изображение
Разметка связных областей
1
1
2
2
2
1
1
2
2
2
3
4
4
5
4
4
4
6
6
6
6
6
7
Бинарное изображение
Размеченное изображение
Слайд 5Рекурсивная разметка связных областей 1
void Labeling(BIT* img[], int* labels[])
{
// labels должна
Рекурсивная разметка связных областей 1
void Labeling(BIT* img[], int* labels[])
{
// labels должна
![Рекурсивная разметка связных областей 1 void Labeling(BIT* img[], int* labels[]) { //](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/368815/slide-4.jpg)
Слайд 6Рекурсивная разметка связных областей 2
void Fill(BIT* img[], int* labels[], int x, int
Рекурсивная разметка связных областей 2
void Fill(BIT* img[], int* labels[], int x, int
![Рекурсивная разметка связных областей 2 void Fill(BIT* img[], int* labels[], int x,](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/368815/slide-5.jpg)
Слайд 7Разметка связных областей путем последовательного сканирования
Последовательно, сканируем бинарное изображение сверху вниз,
слева
Разметка связных областей путем последовательного сканирования
Последовательно, сканируем бинарное изображение сверху вниз, слева
Слайд 8Разметка связных областей путем последовательного сканирования
Случай конфликта:
Постобработка - переразметка с учетом эквивалентностей
Разметка связных областей путем последовательного сканирования
Случай конфликта:
Постобработка - переразметка с учетом эквивалентностей
Слайд 9Анализ формы связных областей
Для каждой области можно подсчитать некий набор
простейших числовых
Анализ формы связных областей
Для каждой области можно подсчитать некий набор простейших числовых
Слайд 10Анализ формы связных областей
Площадь – количество пикселей в области;
Периметр – количество пикселей
Анализ формы связных областей
Площадь – количество пикселей в области;
Периметр – количество пикселей
Слайд 11Подсчет периметра области
Пиксель лежит на границе области, если он сам принадлежит
области
Подсчет периметра области
Пиксель лежит на границе области, если он сам принадлежит области
Слайд 12Пример периметров области
Область
Внутренняя граница
Внешняя граница
Пример периметров области
Область
Внутренняя граница
Внешняя граница
Слайд 13Статистические моменты области
Дискретный центральный момент mij области определяется следующим образом:
n – общее
Статистические моменты области
Дискретный центральный момент mij области определяется следующим образом:
n – общее
Слайд 14Инвариантные характеристики области
Для распознавания нас интересуют характеристики инвариантные по отношению к масштабированию,
Инвариантные характеристики области
Для распознавания нас интересуют характеристики инвариантные по отношению к масштабированию,
Слайд 15Ориентация главной оси инерции
Не является инвариантной к повороту, но в ряде случаев
Ориентация главной оси инерции
Не является инвариантной к повороту, но в ряде случаев
Слайд 16Пример изображения с подсчитанными характеристиками областей
Пример изображения с подсчитанными характеристиками областей
Слайд 17Другие инвариантные характеристики области
Другие инвариантные характеристики области
Слайд 18Перевод изображения в бинарное
Простейший случай – выделение областей, яркость которых выше/ниже некоторого
Перевод изображения в бинарное
Простейший случай – выделение областей, яркость которых выше/ниже некоторого

Слайд 19Как автоматически вычислить порог?
Сегментация изображения на области однородной яркости методом k-средних.
Метод k-средних
Как автоматически вычислить порог?
Сегментация изображения на области однородной яркости методом k-средних.
Метод k-средних
Слайд 20Алгоритм k-средних
Дано:
Набор векторов xi i=1,…,p;
k – число кластеров, на которые нужно разбить
Алгоритм k-средних
Дано:
Набор векторов xi i=1,…,p;
k – число кластеров, на которые нужно разбить
Слайд 21Алгоритм k-средних
Случайным образом выбрать k средних mj j=1,…,k;
Для каждого xi i=1,…,p подсчитать
Алгоритм k-средних
Случайным образом выбрать k средних mj j=1,…,k;
Для каждого xi i=1,…,p подсчитать
Слайд 22Пример кластеризации в 2D
Исходные данные
Пример кластеризации в 2D
Исходные данные
Слайд 23Пример кластеризации в 2D
Случайная инициализация центров кластеров (шаг 1)
Пример кластеризации в 2D
Случайная инициализация центров кластеров (шаг 1)
Слайд 24Пример кластеризации в 2D
Кластеры после первой итерации (шаг 2)
Пример кластеризации в 2D
Кластеры после первой итерации (шаг 2)

Слайд 25Пример кластеризации в 2D
Пересчет центров кластеров после первой итерации (шаг 3)
Пример кластеризации в 2D
Пересчет центров кластеров после первой итерации (шаг 3)
Слайд 26Пример кластеризации в 2D
Кластеры после второй итерации (шаг 2)
Пример кластеризации в 2D
Кластеры после второй итерации (шаг 2)

Слайд 27Пример кластеризации в 2D
Стабильная конфигурация после четвертой итерации
Пример кластеризации в 2D
Стабильная конфигурация после четвертой итерации
Слайд 28Применение k-средних для сегментации изображений по яркости
Рассматриваем одномерное пространство яркостей пикселей и
Применение k-средних для сегментации изображений по яркости
Рассматриваем одномерное пространство яркостей пикселей и

Слайд 29Пример сегментации
k = 2
k = 3
Пример сегментации
k = 2
k = 3

Слайд 30Сравнение k-средних с порогом по средней яркости
После лекции был задан вопрос: чем
Сравнение k-средних с порогом по средней яркости
После лекции был задан вопрос: чем

Слайд 31Преобразование Хафа (Hough)
Преобразование Хафа позволяет находить на бинарном изображении плоские кривые, заданные
Преобразование Хафа (Hough)
Преобразование Хафа позволяет находить на бинарном изображении плоские кривые, заданные
Слайд 32Основная идея метода
Рассмотрим семейство кривых на плоскости, заданное параметрическим уравнением:
F(a1, a2, …,
Основная идея метода
Рассмотрим семейство кривых на плоскости, заданное параметрическим уравнением:
F(a1, a2, …,
Слайд 33Машинное представление
Ввиду дискретности машинного представления и входных данных (изображения), требуется перевести непрерывное
Машинное представление
Ввиду дискретности машинного представления и входных данных (изображения), требуется перевести непрерывное
Слайд 34Выделение прямых на изображении
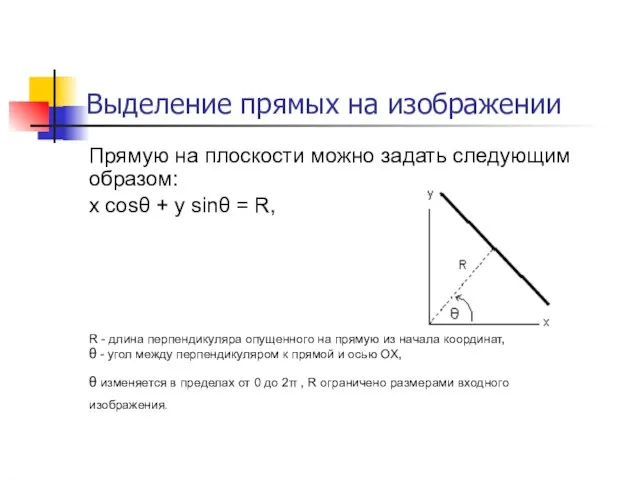
Прямую на плоскости можно задать следующим образом:
x cosθ +
Выделение прямых на изображении
Прямую на плоскости можно задать следующим образом:
x cosθ +
Слайд 35Выделение прямых на изображении
Таким образом функция, задающая семейство прямых,
имеет вид:
F
Выделение прямых на изображении
Таким образом функция, задающая семейство прямых, имеет вид: F
Слайд 36Изображение и фазовое пространство
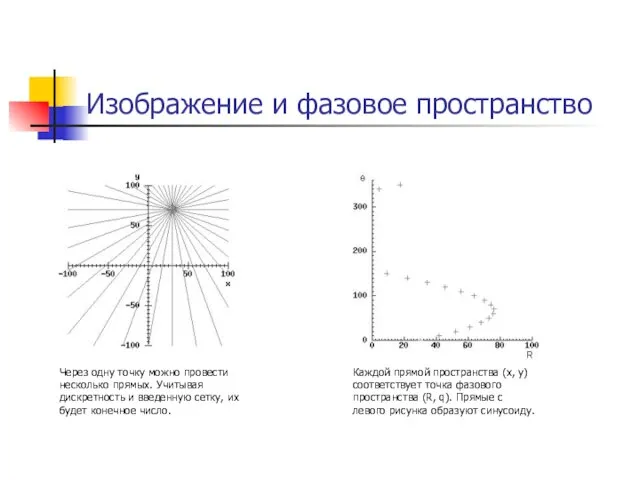
Через одну точку можно провести несколько прямых. Учитывая дискретность
Изображение и фазовое пространство
Через одну точку можно провести несколько прямых. Учитывая дискретность
Слайд 37Изображение и фазовое пространство
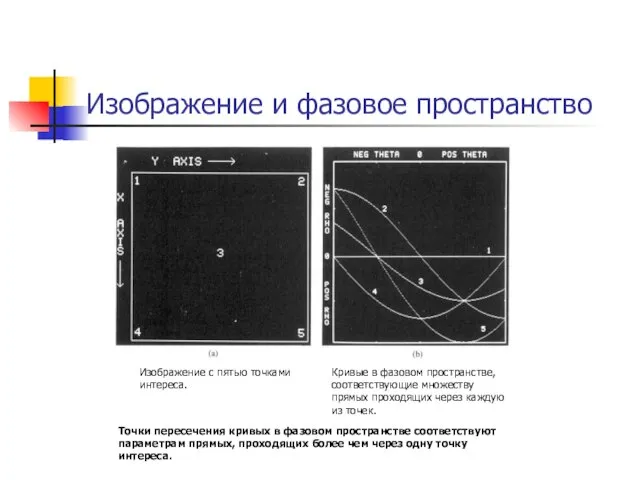
Изображение с пятью точками интереса.
Кривые в фазовом пространстве, соответствующие
Изображение и фазовое пространство
Изображение с пятью точками интереса.
Кривые в фазовом пространстве, соответствующие
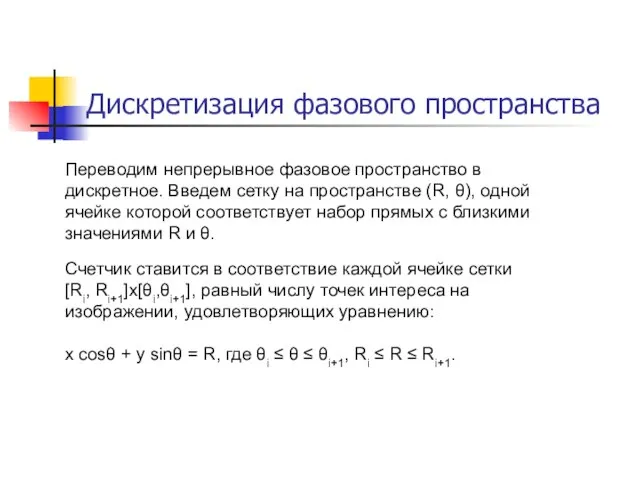
Слайд 38Дискретизация фазового пространства
Переводим непрерывное фазовое пространство в дискретное. Введем сетку на пространстве
Дискретизация фазового пространства
Переводим непрерывное фазовое пространство в дискретное. Введем сетку на пространстве
Слайд 39Алгоритм выделения прямых
обнулить счетчики всех ячеек;
для каждой точки интереса на изображении:
для каждой
Алгоритм выделения прямых
обнулить счетчики всех ячеек;
для каждой точки интереса на изображении:
для каждой
Слайд 40Размер ячеек стоит выбирать аккуратно
Если ячейки будут очень большими, то за «прямую»
Размер ячеек стоит выбирать аккуратно
Если ячейки будут очень большими, то за «прямую»
Слайд 41Примеры работы
Примеры работы
Слайд 42Примеры работы (с шумом)
Примеры работы (с шумом)
 www.Ritz-BTR.narod.ru
www.Ritz-BTR.narod.ru Ресурсы и назначения
Ресурсы и назначения Интернет 11 класс
Интернет 11 класс Мастер – класс Вязка туристических узлов, применение их в туристской деятельности
Мастер – класс Вязка туристических узлов, применение их в туристской деятельности реклама
реклама Фантазии синьора Родари
Фантазии синьора Родари Развитие творческих способностей учащихся на уроках информатики
Развитие творческих способностей учащихся на уроках информатики Оформляем работу интересно и правильно
Оформляем работу интересно и правильно Информационно-аналитическая система «Курорты Кубани»
Информационно-аналитическая система «Курорты Кубани» Правосудие в современной России
Правосудие в современной России Классификация магнитных материалов
Классификация магнитных материалов Психология в экскурсоведении
Психология в экскурсоведении Илья Муромец и Соловей-разбойник
Илья Муромец и Соловей-разбойник День открытых дверей
День открытых дверей Психолого-педагогические вопросы развития культуры детской социальной инициативы в образовательных учреждениях
Психолого-педагогические вопросы развития культуры детской социальной инициативы в образовательных учреждениях Давыдова Александра. Предвыборная программа кандидата в СС ФМОПИ II созыва
Давыдова Александра. Предвыборная программа кандидата в СС ФМОПИ II созыва Исследовательский проектИстория народной медицины
Исследовательский проектИстория народной медицины Внеземные цивилизации
Внеземные цивилизации Карта пробных ароматов: Al Haramain/Aysha (милая)
Карта пробных ароматов: Al Haramain/Aysha (милая) Презентация на тему Бой у мыса Акций
Презентация на тему Бой у мыса Акций  Вступление в материаловедение
Вступление в материаловедение  Урок русского языка в 5 классеУчитель Сухицкая В.Т.Брянский городской лицей №1имени А.С.Пушкина
Урок русского языка в 5 классеУчитель Сухицкая В.Т.Брянский городской лицей №1имени А.С.Пушкина Виды и рода вооружённых Сил РФ. Сухопутные войска
Виды и рода вооружённых Сил РФ. Сухопутные войска Движение денежных средств: структура, содержание и аналитические возможности
Движение денежных средств: структура, содержание и аналитические возможности Интерференция света
Интерференция света Санитария и гигиена при приготовлении пищи
Санитария и гигиена при приготовлении пищи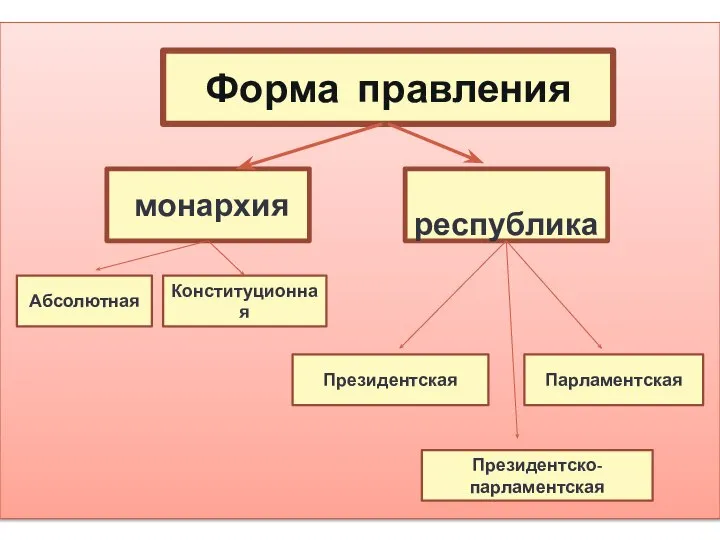 Форма правления
Форма правления Презентация на тему Мы против гриппа
Презентация на тему Мы против гриппа