- Асинхронные машины Рабочие характеристики Опыт холостого хода

Содержание
- 2. РАБОЧИЕ ХАРАКТЕРИСТИКИ АД Рабочие характеристики определяют эксплуатационные свойства асинхронного двигателя (АД) СКОРОСТНАЯ ХАРАКТЕРИСТИКА n2 = ƒ
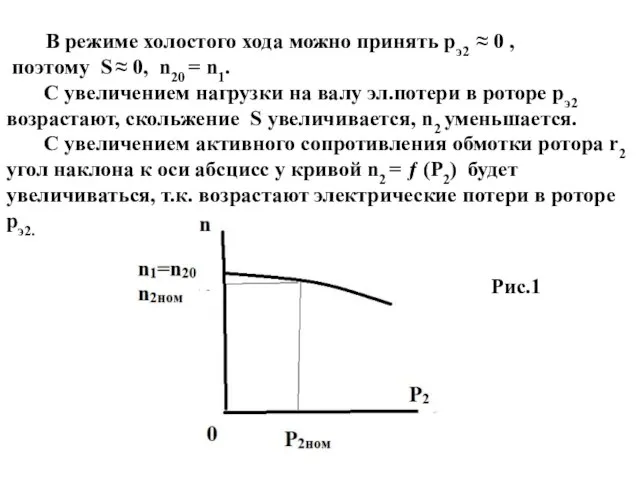
- 3. В режиме холостого хода можно принять рэ2 ≈ 0 , поэтому S ≈ 0, n20 =
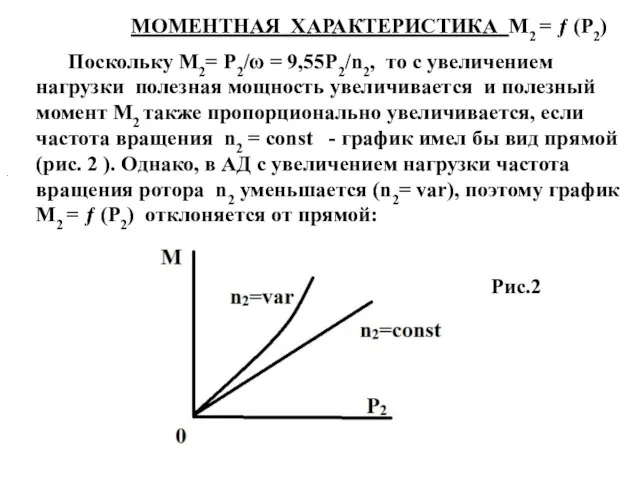
- 4. МОМЕНТНАЯ ХАРАКТЕРИСТИКА М2 = ƒ (Р2) Поскольку М2= Р2/ω = 9,55Р2/n2, то с увеличением нагрузки полезная
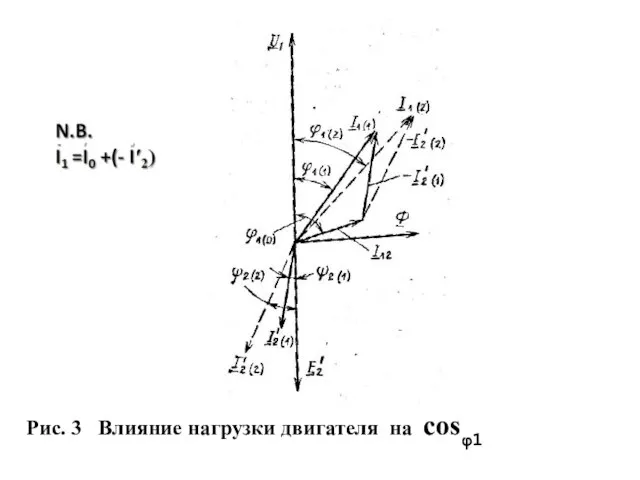
- 5. Рис. 3 Влияние нагрузки двигателя на соsφ1
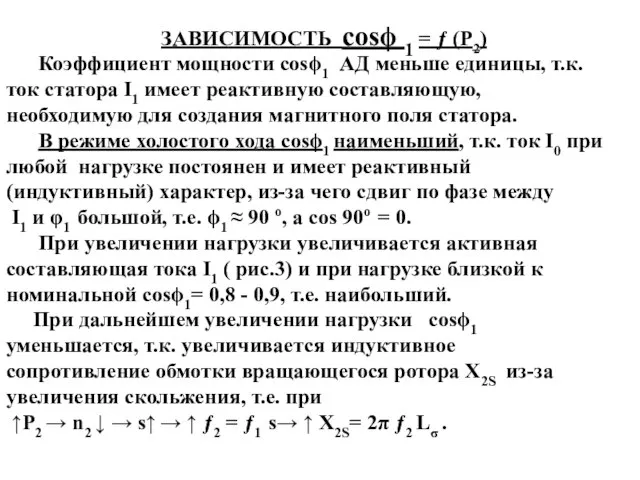
- 6. ЗАВИСИМОСТЬ cosϕ 1 = ƒ (Р2) Коэффициент мощности cosϕ1 АД меньше единицы, т.к. ток статора І1
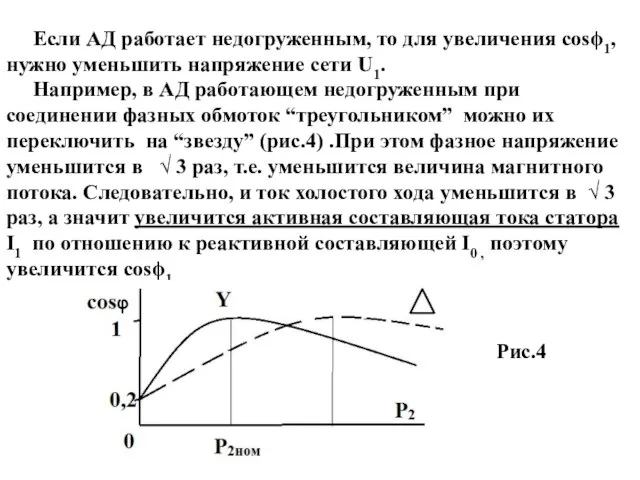
- 7. Если АД работает недогруженным, то для увеличения cosϕ1, нужно уменьшить напряжение сети U1. Например, в АД
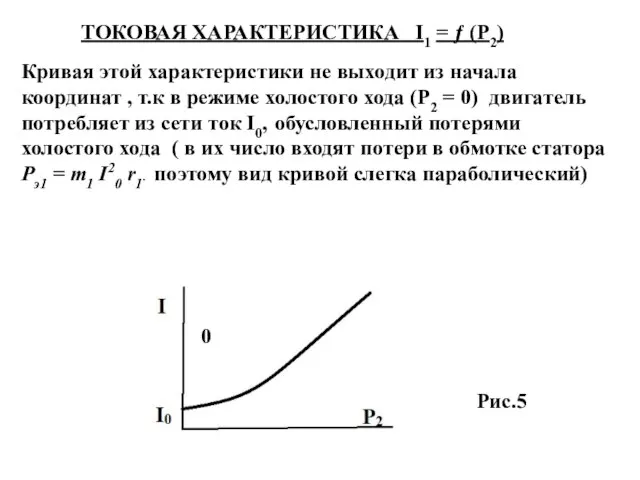
- 8. ТОКОВАЯ ХАРАКТЕРИСТИКА І1 = ƒ (Р2) Кривая этой характеристики не выходит из начала координат , т.к
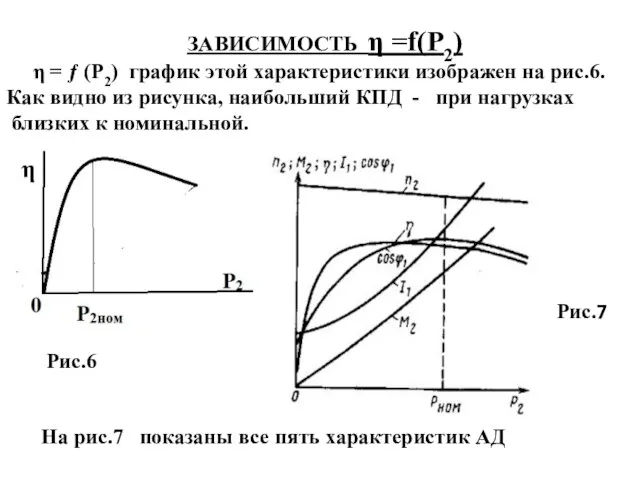
- 9. ЗАВИСИМОСТЬ η =f(P2) η = ƒ (Р2) график этой характеристики изображен на рис.6. Как видно из
- 10. Чтобы получить данные для построения рабочих характеристик АД существует два метода: метод непосредственной нагрузки ( его
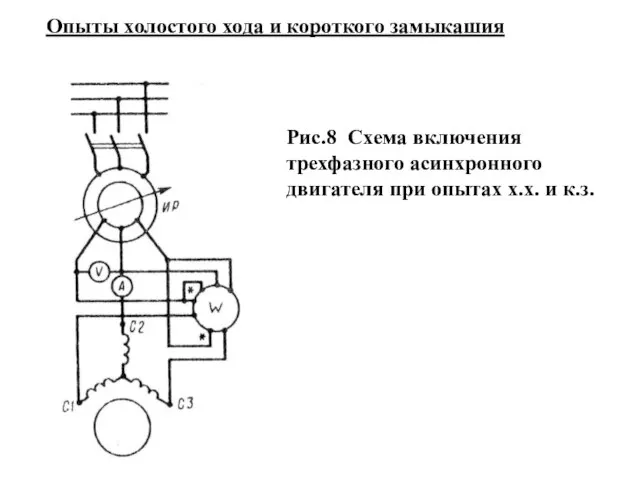
- 11. Рис.8 Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з. Опыты холостого хода и короткого
- 12. Ваттметр W измеряет активную мощность Р0, потребляемую двигателем в режиме х.х., которая включает в себя электрические
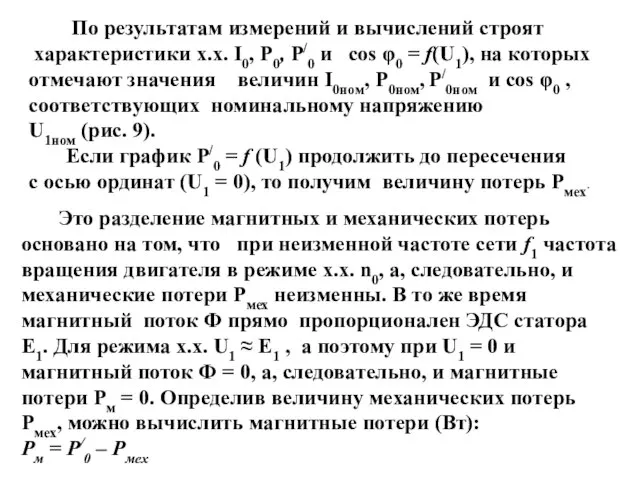
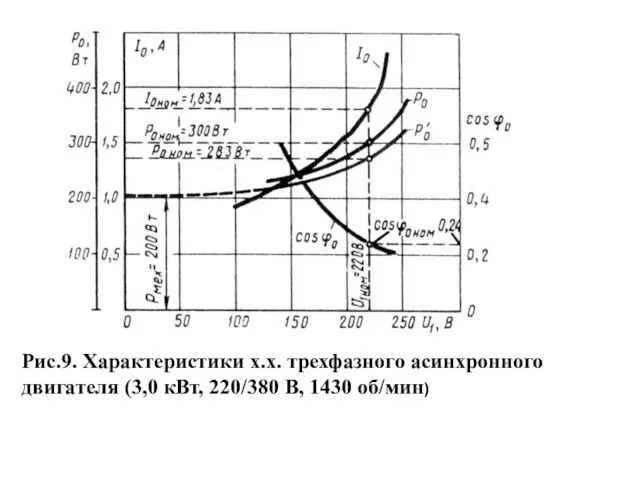
- 13. По результатам измерений и вычислений строят характеристики х.х. I0, P0, P/0 и соs φ0 = f(U1),
- 14. Рис.9. Характеристики х.х. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
- 15. Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют коэффициент трансформации напряжений между обмотками
- 16. Опыт короткого замыкания Схема соединений асинхронного двигателя при опыте к.з. остается, как и в опыте х.х.
- 17. Предельное значение тока статора при опыте к.з. устанавливают, исходя из допустимой токовой нагрузки питающей сети и
- 18. Определив диапазон изменения тока статора при опыте к.з., опыт начинают с предельного значения этого тока, установив
- 19. Продолжительность опыта должна быть минимально возможной. С этой целью измеряют лишь одно линейное напряжение (например, UкАВ),
- 20. После снятия последних показаний приборов двигатель следует отключить и сразу же произвести замер активного сопротивления фазы
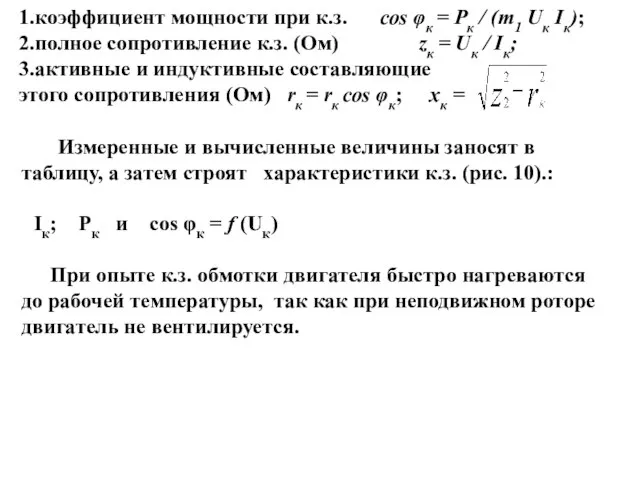
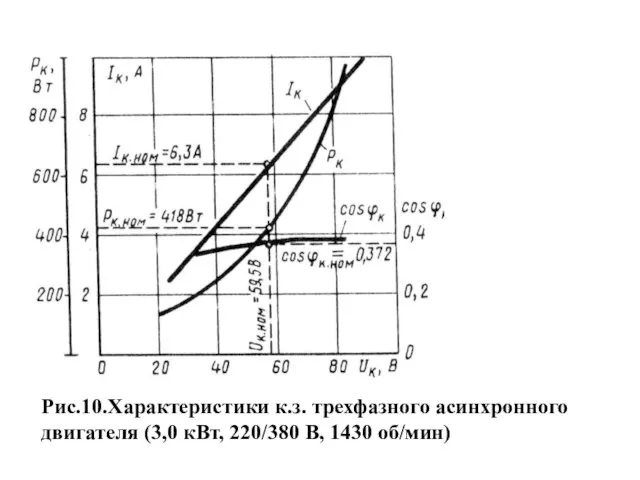
- 21. 1.коэффициент мощности при к.з. cos φк = Pк / (m1 Uк Iк); 2.полное сопротивление к.з. (Ом)
- 22. Рис.10.Характеристики к.з. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
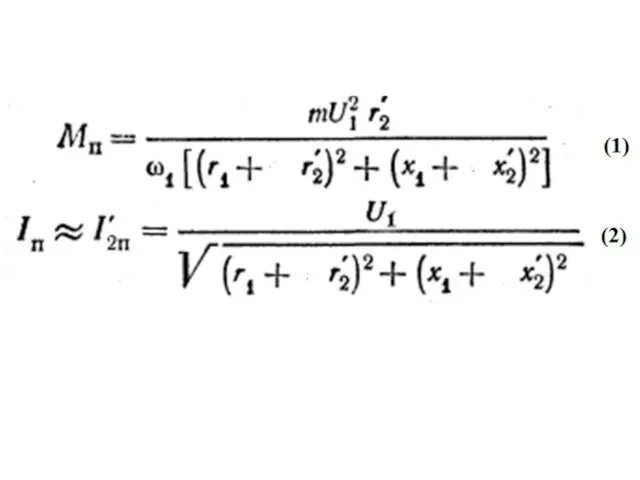
- 23. Пуск в ход асинхронных двигателей Пусковые свойства двигателя оценивают: 1.значением пускового тока Iп или его кратностью
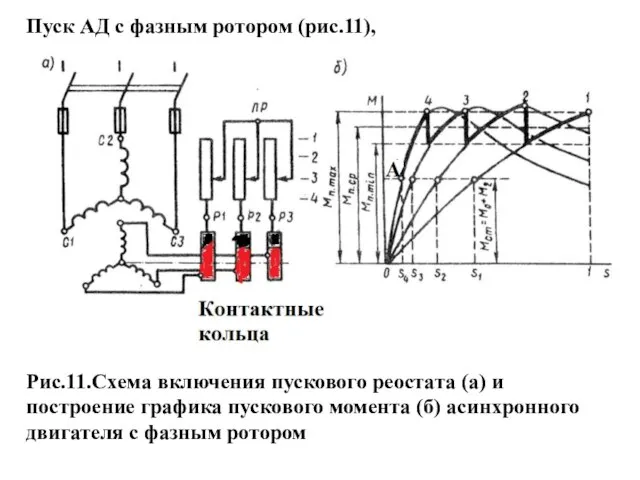
- 25. Рис.11.Схема включения пускового реостата (а) и построение графика пускового момента (б) асинхронного двигателя с фазным ротором
- 26. Описание пуска: На рис. 11, а показана схема включения 4-х ступенчатого ПР в цепь фазного ротора.
- 27. Теперь зависимость М = f(s) выражается кривой 2 и пусковой момент двигателя вновь достигает Мп.mах. Затем
- 28. Здесь существует несколько способов пуска: а) Прямой пуск IН = (5 – 7)IН. МП – маленький
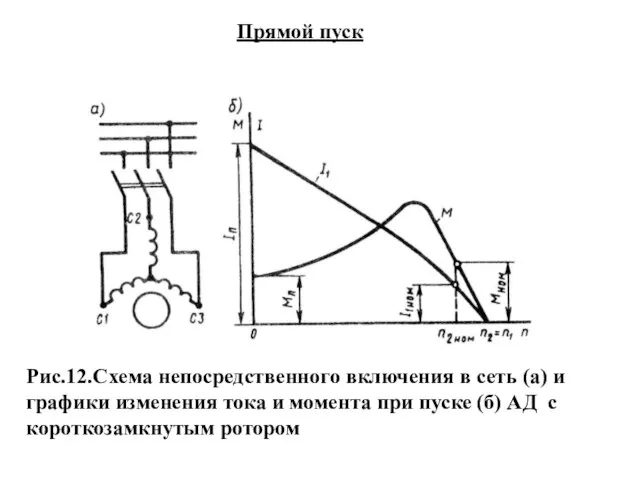
- 29. Прямой пуск Рис.12.Схема непосредственного включения в сеть (а) и графики изменения тока и момента при пуске
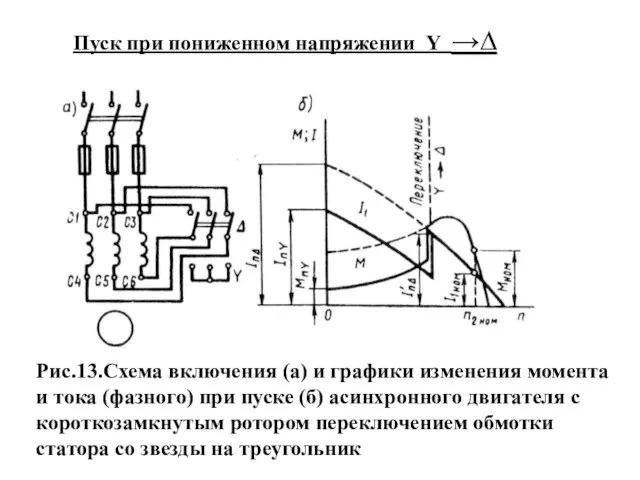
- 30. Пуск при пониженном напряжении Y →∆ Рис.13.Схема включения (а) и графики изменения момента и тока (фазного)
- 31. В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается
- 32. Более универсальным является способ с понижением подводимого к двигателю напряжения посредством реакторов (реактивных катушек — дросселей)
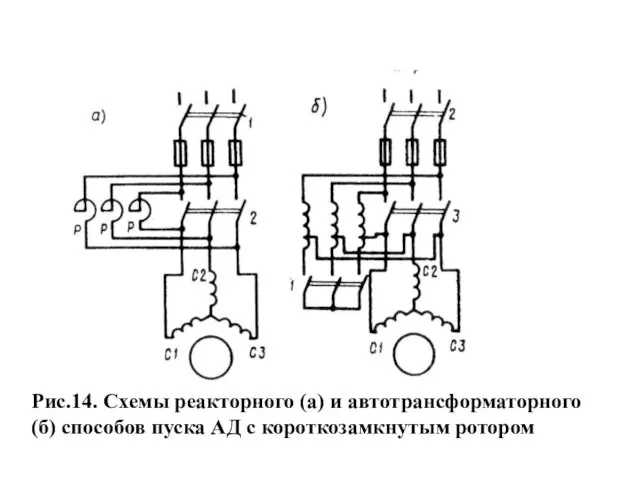
- 33. Рис.14. Схемы реакторного (а) и автотрансформаторного (б) способов пуска АД с короткозамкнутым ротором
- 34. При автотрансформаторном пуске (рис.14,б) пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КА раз, (где
- 35. .После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение
- 36. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске
- 37. Короткозамкнутые асинхронные двигатели с улучшенными пусковыми свойствами (глубокопазный и двухклеточный)
- 38. Глубокопазный АД От обычного АД он отличается тем, что пазы ротора сделаны в виде узких глубоких
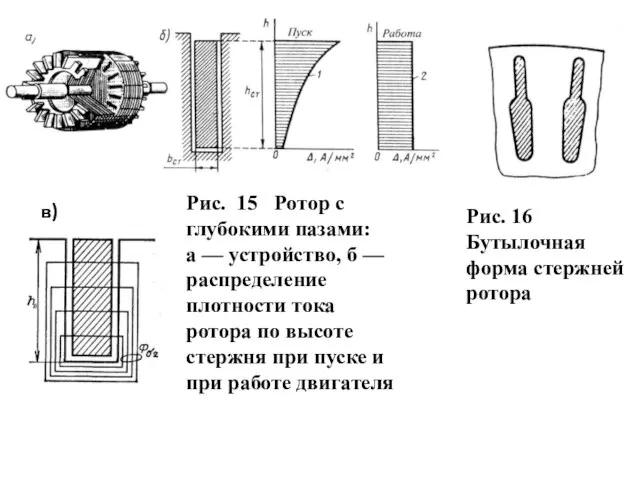
- 39. Рис. 15 Ротор с глубокими пазами: а — устройство, б — распределение плотности тока ротора по
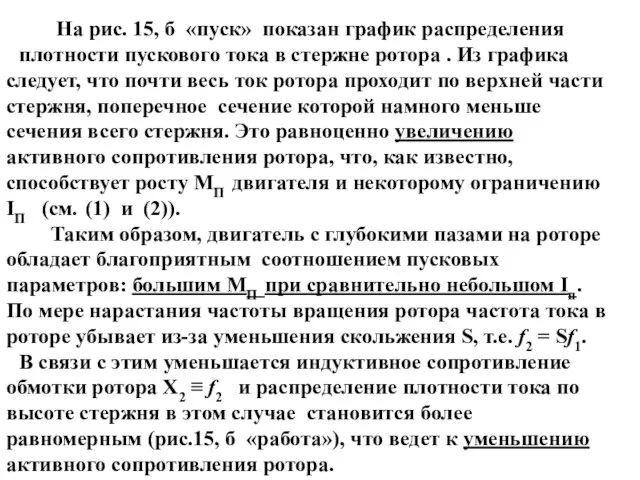
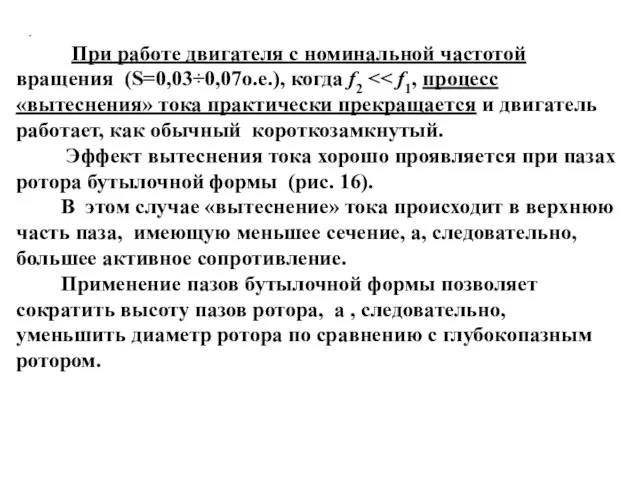
- 40. На рис. 15, б «пуск» показан график распределения плотности пускового тока в стержне ротора . Из
- 41. . При работе двигателя с номинальной частотой вращения (S=0,03÷0,07о.е.), когда f2 Эффект вытеснения тока хорошо проявляется
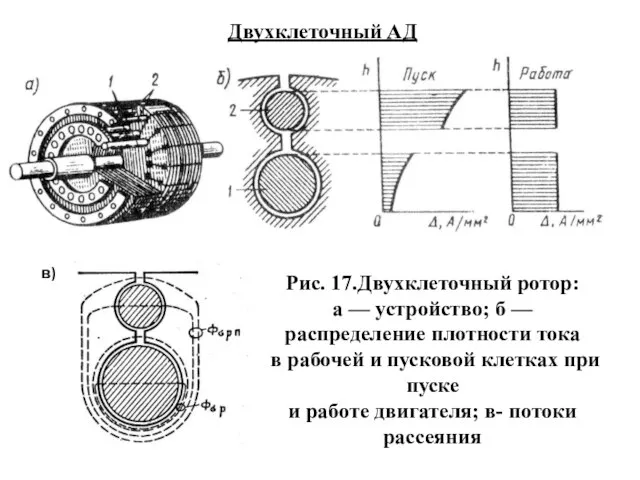
- 42. Двухклеточный АД Рис. 17.Двухклеточный ротор: а — устройство; б — распределение плотности тока в рабочей и
- 43. Двигатель с двумя клетками на роторе. Еще лучшими пусковыми свойствами обладают АД с двумя короткозамкнутыми клетками
- 44. Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями пусковой клетки они имеют большее
- 45. Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный: пусковой момент при пониженном пусковом токе. По мере
- 46. Так как активные сопротивления клеток ротора неодинаковы, то зависимость M = f(s) этих клеток изображается разными
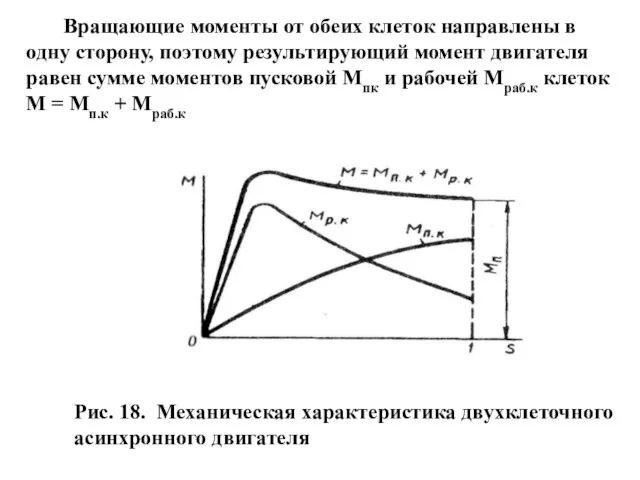
- 47. Рис. 18. Механическая характеристика двухклеточного асинхронного двигателя Вращающие моменты от обеих клеток направлены в одну сторону,
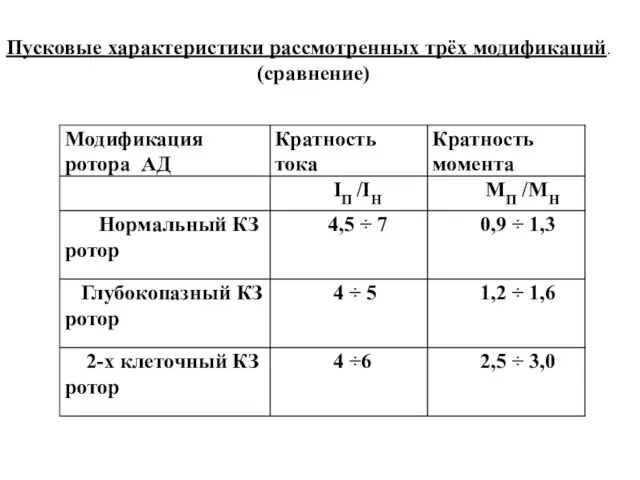
- 48. Пусковые характеристики рассмотренных трёх модификаций. (сравнение)
- 49. Вывод: в двухклеточном роторе ток в начальный момент пуска вытесняется в наружную пусковую обмотку (материал латунь),
- 51. Скачать презентацию
Слайд 2РАБОЧИЕ ХАРАКТЕРИСТИКИ АД
Рабочие характеристики определяют эксплуатационные
свойства асинхронного двигателя (АД)
СКОРОСТНАЯ
РАБОЧИЕ ХАРАКТЕРИСТИКИ АД
Рабочие характеристики определяют эксплуатационные
свойства асинхронного двигателя (АД)
СКОРОСТНАЯ
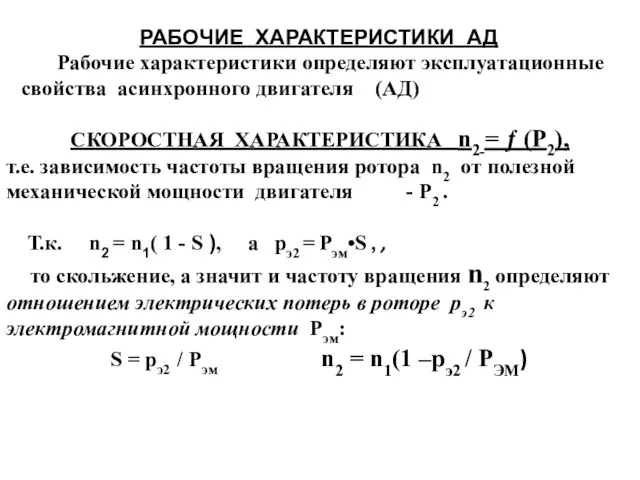
Слайд 3 В режиме холостого хода можно принять рэ2 ≈ 0 ,
поэтому
В режиме холостого хода можно принять рэ2 ≈ 0 ,
поэтому
Слайд 4МОМЕНТНАЯ ХАРАКТЕРИСТИКА М2 = ƒ (Р2)
Поскольку М2= Р2/ω = 9,55Р2/n2, то
МОМЕНТНАЯ ХАРАКТЕРИСТИКА М2 = ƒ (Р2)
Поскольку М2= Р2/ω = 9,55Р2/n2, то
Слайд 5Рис. 3 Влияние нагрузки двигателя на соsφ1
Рис. 3 Влияние нагрузки двигателя на соsφ1
Слайд 6ЗАВИСИМОСТЬ cosϕ 1 = ƒ (Р2)
Коэффициент мощности cosϕ1 АД меньше единицы,
ЗАВИСИМОСТЬ cosϕ 1 = ƒ (Р2)
Коэффициент мощности cosϕ1 АД меньше единицы,
Слайд 7 Если АД работает недогруженным, то для увеличения cosϕ1, нужно уменьшить напряжение
Если АД работает недогруженным, то для увеличения cosϕ1, нужно уменьшить напряжение
Слайд 8ТОКОВАЯ ХАРАКТЕРИСТИКА І1 = ƒ (Р2)
Кривая этой характеристики не выходит из начала
ТОКОВАЯ ХАРАКТЕРИСТИКА І1 = ƒ (Р2)
Кривая этой характеристики не выходит из начала
Слайд 9ЗАВИСИМОСТЬ η =f(P2)
η = ƒ (Р2) график этой характеристики изображен на
ЗАВИСИМОСТЬ η =f(P2)
η = ƒ (Р2) график этой характеристики изображен на
Слайд 10 Чтобы получить данные для построения рабочих характеристик АД существует два метода:
Чтобы получить данные для построения рабочих характеристик АД существует два метода:
Слайд 11Рис.8 Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з.
Опыты холостого
Рис.8 Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з.
Опыты холостого
Слайд 12 Ваттметр W измеряет активную мощность Р0, потребляемую двигателем в режиме х.х.,
Ваттметр W измеряет активную мощность Р0, потребляемую двигателем в режиме х.х.,
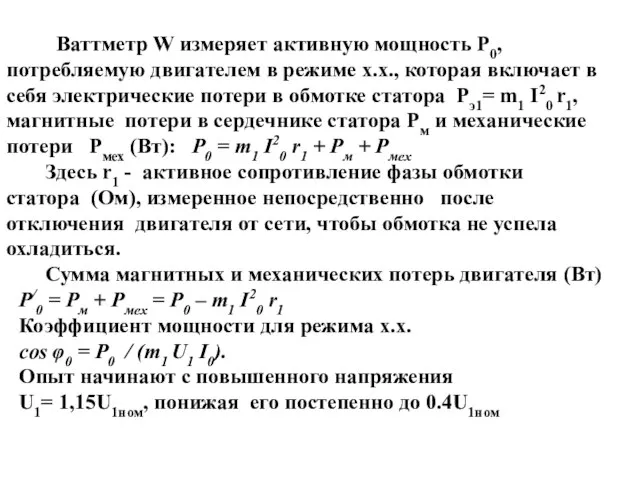
Слайд 13 По результатам измерений и вычислений строят
характеристики х.х. I0, P0, P/0
По результатам измерений и вычислений строят
характеристики х.х. I0, P0, P/0
Слайд 14Рис.9. Характеристики х.х. трехфазного асинхронного
двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
Рис.9. Характеристики х.х. трехфазного асинхронного
двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
Слайд 15 Для асинхронных двигателей с фазным ротором в опыте
холостого хода определяют
коэффициент
Для асинхронных двигателей с фазным ротором в опыте
холостого хода определяют
коэффициент
Слайд 16Опыт короткого замыкания
Схема соединений асинхронного двигателя при опыте к.з. остается, как
Опыт короткого замыкания
Схема соединений асинхронного двигателя при опыте к.з. остается, как
Слайд 17 Предельное значение тока статора при опыте к.з. устанавливают, исходя из допустимой
Предельное значение тока статора при опыте к.з. устанавливают, исходя из допустимой
Слайд 18 Определив диапазон изменения тока статора при опыте к.з., опыт начинают с
Определив диапазон изменения тока статора при опыте к.з., опыт начинают с
Слайд 19 Продолжительность опыта должна быть минимально
возможной. С этой целью измеряют лишь
Продолжительность опыта должна быть минимально
возможной. С этой целью измеряют лишь
Слайд 20 После снятия последних показаний приборов двигатель следует отключить и сразу же
После снятия последних показаний приборов двигатель следует отключить и сразу же
Слайд 211.коэффициент мощности при к.з. cos φк = Pк / (m1 Uк Iк);
1.коэффициент мощности при к.з. cos φк = Pк / (m1 Uк Iк);
Слайд 22Рис.10.Характеристики к.з. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
Рис.10.Характеристики к.з. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
Слайд 23Пуск в ход асинхронных двигателей
Пусковые свойства двигателя оценивают:
1.значением пускового тока
Пуск в ход асинхронных двигателей
Пусковые свойства двигателя оценивают:
1.значением пускового тока
Слайд 25Рис.11.Схема включения пускового реостата (а) и построение графика пускового момента (б) асинхронного
Рис.11.Схема включения пускового реостата (а) и построение графика пускового момента (б) асинхронного
Слайд 26 Описание пуска:
На рис. 11, а показана схема включения 4-х ступенчатого
Описание пуска:
На рис. 11, а показана схема включения 4-х ступенчатого
Слайд 27 Теперь зависимость М = f(s) выражается кривой 2 и пусковой момент
Теперь зависимость М = f(s) выражается кривой 2 и пусковой момент
Слайд 28Здесь существует несколько способов пуска:
а) Прямой пуск IН = (5 – 7)IН.
Здесь существует несколько способов пуска:
а) Прямой пуск IН = (5 – 7)IН.
Слайд 29Прямой пуск
Рис.12.Схема непосредственного включения в сеть (а) и графики изменения тока и
Прямой пуск
Рис.12.Схема непосредственного включения в сеть (а) и графики изменения тока и
Слайд 30Пуск при пониженном напряжении Y →∆
Рис.13.Схема включения (а) и графики изменения момента
Пуск при пониженном напряжении Y →∆
Рис.13.Схема включения (а) и графики изменения момента
Слайд 31 В момент подключения двигателя к сети переключатель ставят в положение «звезда»,
В момент подключения двигателя к сети переключатель ставят в положение «звезда»,
Слайд 32 Более универсальным является способ с понижением подводимого к двигателю напряжения посредством
Более универсальным является способ с понижением подводимого к двигателю напряжения посредством
Слайд 33Рис.14. Схемы реакторного (а) и автотрансформаторного (б) способов пуска АД с короткозамкнутым
Рис.14. Схемы реакторного (а) и автотрансформаторного (б) способов пуска АД с короткозамкнутым
Слайд 34При автотрансформаторном пуске (рис.14,б) пусковой ток
двигателя, измеренный на выходе автотрансформатора,
уменьшается
двигателя, измеренный на выходе автотрансформатора,
уменьшается
Слайд 35 .После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается
.После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается
Слайд 36 С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного,
С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного,
Слайд 37Короткозамкнутые асинхронные двигатели с улучшенными пусковыми свойствами
(глубокопазный и двухклеточный)
Короткозамкнутые асинхронные двигатели с улучшенными пусковыми свойствами
(глубокопазный и двухклеточный)
Слайд 38Глубокопазный АД
От обычного АД он отличается тем, что пазы ротора сделаны
Глубокопазный АД
От обычного АД он отличается тем, что пазы ротора сделаны
Слайд 39Рис. 15 Ротор с глубокими пазами:
а — устройство, б — распределение плотности
Рис. 15 Ротор с глубокими пазами:
а — устройство, б — распределение плотности
Слайд 40 На рис. 15, б «пуск» показан график распределения
плотности пускового тока
На рис. 15, б «пуск» показан график распределения
плотности пускового тока
Слайд 41.
При работе двигателя с номинальной частотой вращения (S=0,03÷0,07о.е.), когда f2 <<
.
При работе двигателя с номинальной частотой вращения (S=0,03÷0,07о.е.), когда f2 <<
Слайд 42Двухклеточный АД
Рис. 17.Двухклеточный ротор:
а — устройство; б — распределение плотности тока
в
Двухклеточный АД
Рис. 17.Двухклеточный ротор:
а — устройство; б — распределение плотности тока
в
Слайд 43Двигатель с двумя клетками на роторе. Еще лучшими пусковыми свойствами обладают АД
Двигатель с двумя клетками на роторе. Еще лучшими пусковыми свойствами обладают АД
Слайд 44 Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями
Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями
Слайд 45 Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный: пусковой момент при
Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный: пусковой момент при
Слайд 46 Так как активные сопротивления клеток ротора неодинаковы, то зависимость M =
Так как активные сопротивления клеток ротора неодинаковы, то зависимость M =
Слайд 47Рис. 18. Механическая характеристика двухклеточного
асинхронного двигателя
Вращающие моменты от обеих клеток направлены
Рис. 18. Механическая характеристика двухклеточного
асинхронного двигателя
Вращающие моменты от обеих клеток направлены
Слайд 48Пусковые характеристики рассмотренных трёх модификаций.
(сравнение)
Пусковые характеристики рассмотренных трёх модификаций.
(сравнение)
Слайд 49Вывод:
в двухклеточном роторе ток в начальный момент пуска вытесняется в наружную пусковую
Вывод:
в двухклеточном роторе ток в начальный момент пуска вытесняется в наружную пусковую
 Презентация на тему Глобальное потепление
Презентация на тему Глобальное потепление  Шкала электромагнитных излучений
Шкала электромагнитных излучений Нашествие с Востока на Русь
Нашествие с Востока на Русь Пример построения системы управления машиностроительным производством
Пример построения системы управления машиностроительным производством Государственная поддержка агрострахования и мелиорации земель
Государственная поддержка агрострахования и мелиорации земель 2012 год. Цементный рынок: как жить в эпоху дефицита?
2012 год. Цементный рынок: как жить в эпоху дефицита? ТЕМА: Пластик- удобно, выгодно, губительно!
ТЕМА: Пластик- удобно, выгодно, губительно! Технологическое нормирование эксплуатационной работы железных дорог
Технологическое нормирование эксплуатационной работы железных дорог Швидке читання - запорука успішного навчання
Швидке читання - запорука успішного навчання Презентация на тему Франция
Презентация на тему Франция МАФ из современных материалов для детских площадок
МАФ из современных материалов для детских площадок Материалы для подготовки к контрольной работе по теме Греция
Материалы для подготовки к контрольной работе по теме Греция Вредные привычки у детей. Консультация для родителей
Вредные привычки у детей. Консультация для родителей Анализ препятствий на пути расширения доступа к услугам по ДКТ и внедрения системы супервизии
Анализ препятствий на пути расширения доступа к услугам по ДКТ и внедрения системы супервизии БИОГРАФИЯ Лавриненкова Владимира Дмитриевича Родился 15 Мая 1919 года в деревне Птахино, Смоленской области, в семье крестьянина. В 1
БИОГРАФИЯ Лавриненкова Владимира Дмитриевича Родился 15 Мая 1919 года в деревне Птахино, Смоленской области, в семье крестьянина. В 1 Добыча полезных ископаемых на Луне из реголита
Добыча полезных ископаемых на Луне из реголита Социальная политика государства
Социальная политика государства 20161109_prezentatsiya_1
20161109_prezentatsiya_1 Презентация на тему Русской речи государь по прозванию Словарь
Презентация на тему Русской речи государь по прозванию Словарь Народная игрушка в развитии дошкольников
Народная игрушка в развитии дошкольников Информационный поиск в Интернете
Информационный поиск в Интернете Жисмоний шахс ер мулк соликлар
Жисмоний шахс ер мулк соликлар Жанры изобразительного искусства
Жанры изобразительного искусства Эффективное регулирование на конкурентных энергетических рынках обеспечивает доступность энергии Сергей Геннадьевич Новиков
Эффективное регулирование на конкурентных энергетических рынках обеспечивает доступность энергии Сергей Геннадьевич Новиков  Презентация на тему Школа будущего
Презентация на тему Школа будущего Рисованные объекты Действия над объектами
Рисованные объекты Действия над объектами Система диагностики и коррекции как снятие психолого-педагогических трудностей при обучении математике слабоуспевающего учени
Система диагностики и коррекции как снятие психолого-педагогических трудностей при обучении математике слабоуспевающего учени Вместе мы – сила!
Вместе мы – сила!