Бакалаврская работа по теме:Анализ коррелятора навигационного приемника перспективных сигналов ГЛОНАСС.
- Бакалаврская работа по теме:Анализ коррелятора навигационного приемника перспективных сигналов ГЛОНАСС.

Содержание
- 2. Постановка задачи. Конечной задачей навигации является извлечение информации об изучаемых объектах, а точнее – координат и
- 3. Основные сведения о новых сигналах. В системах с кодовым разделением излучение происходит на одной частоте, но
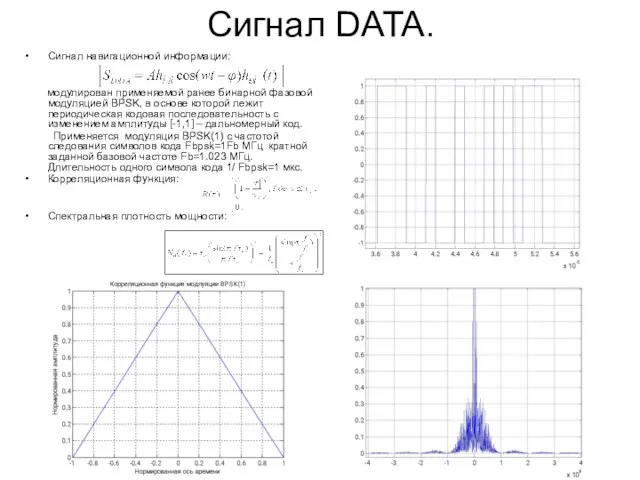
- 4. Сигнал DATA. Сигнал навигационной информации: модулирован применяемой ранее бинарной фазовой модуляцией BPSK, в основе которой лежит
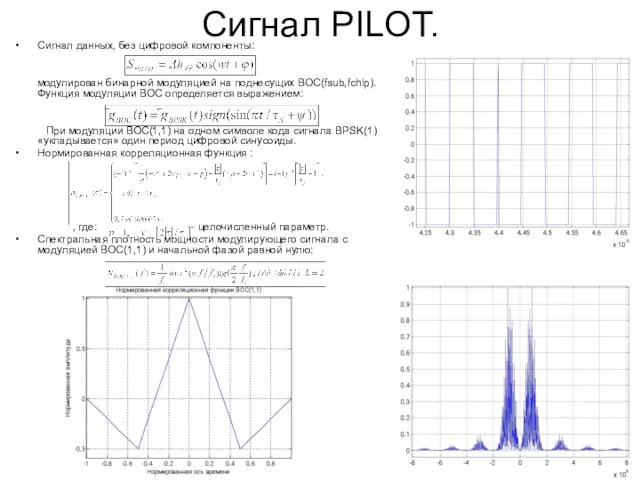
- 5. Сигнал PILOT. Сигнал данных, без цифровой компоненты: модулирован бинарной модуляцией на поднесущих BОС(fsub,fchip). Функция модуляции ВОС
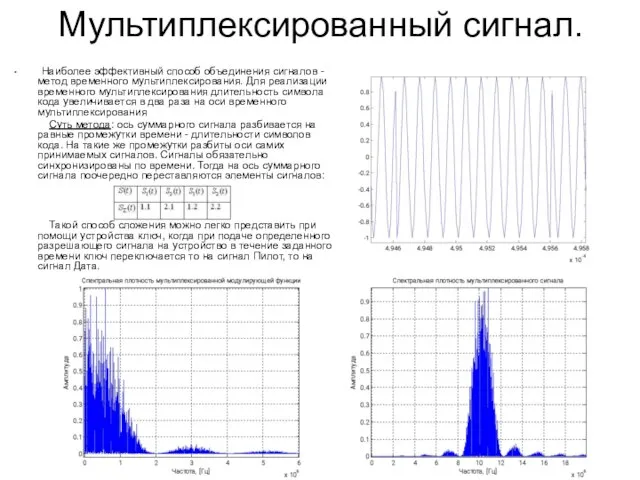
- 6. Мультиплексированный сигнал. Наиболее эффективный способ объединения сигналов - метод временного мультиплексирования. Для реализации временного мультиплексирования длительность
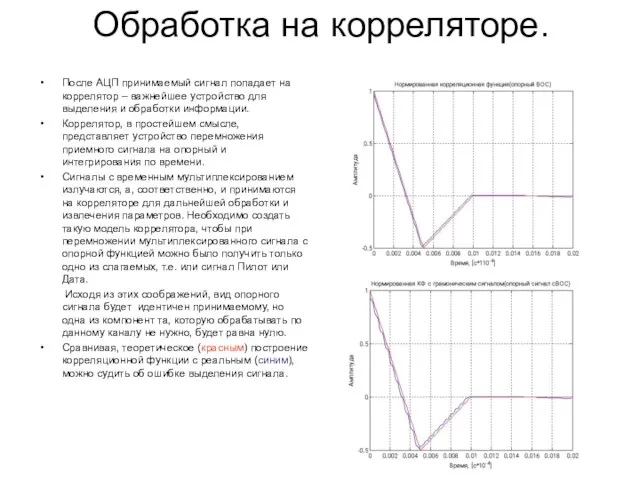
- 7. Обработка на корреляторе. После АЦП принимаемый сигнал попадает на коррелятор – важнейшее устройство для выделения и
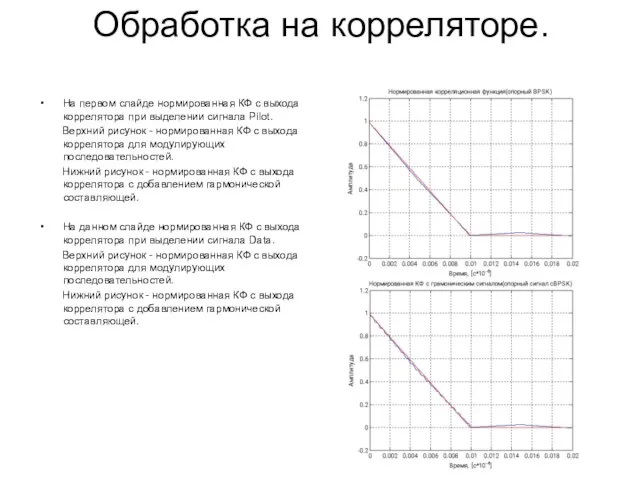
- 8. Обработка на корреляторе. На первом слайде нормированная КФ с выхода коррелятора при выделении сигнала Pilot. Верхний
- 10. Скачать презентацию
Слайд 2Постановка задачи.
Конечной задачей навигации является извлечение информации об изучаемых объектах, а точнее
Постановка задачи.
Конечной задачей навигации является извлечение информации об изучаемых объектах, а точнее
Слайд 3Основные сведения о новых сигналах.
В системах с кодовым разделением излучение происходит на
Основные сведения о новых сигналах.
В системах с кодовым разделением излучение происходит на
Слайд 4Сигнал DATA.
Сигнал навигационной информации:
модулирован применяемой ранее бинарной фазовой модуляцией BPSK, в
Сигнал DATA.
Сигнал навигационной информации:
модулирован применяемой ранее бинарной фазовой модуляцией BPSK, в
Слайд 5Сигнал PILOT.
Сигнал данных, без цифровой компоненты:
модулирован бинарной модуляцией на поднесущих BОС(fsub,fchip).
Сигнал PILOT.
Сигнал данных, без цифровой компоненты:
модулирован бинарной модуляцией на поднесущих BОС(fsub,fchip).
Слайд 6Мультиплексированный сигнал.
Наиболее эффективный способ объединения сигналов - метод временного мультиплексирования. Для
Мультиплексированный сигнал.
Наиболее эффективный способ объединения сигналов - метод временного мультиплексирования. Для
Слайд 7Обработка на корреляторе.
После АЦП принимаемый сигнал попадает на коррелятор – важнейшее устройство
Обработка на корреляторе.
После АЦП принимаемый сигнал попадает на коррелятор – важнейшее устройство
Слайд 8Обработка на корреляторе.
На первом слайде нормированная КФ с выхода коррелятора при выделении
Обработка на корреляторе.
На первом слайде нормированная КФ с выхода коррелятора при выделении
 Родословная моей семьи
Родословная моей семьи Рубцова Ирина Алексеевнаучитель ТСОШ 1. Прочитать параграф учебника и найти ответ на вопрос. Самостоятельная работа с книгой.
Рубцова Ирина Алексеевнаучитель ТСОШ 1. Прочитать параграф учебника и найти ответ на вопрос. Самостоятельная работа с книгой. Культурное наследие Сибири
Культурное наследие Сибири  Л Кривые второго порядка
Л Кривые второго порядка мужчины и женщины - такие похожие и такие разные?
мужчины и женщины - такие похожие и такие разные? Тропический и внетропический циклоны
Тропический и внетропический циклоны Презентация на тему Пластиковая посуда и опасность для здоровья школьника
Презентация на тему Пластиковая посуда и опасность для здоровья школьника Соцсети для e-commerce Уголок экспериментальной торговли
Соцсети для e-commerce Уголок экспериментальной торговли Презентация на тему Опыт по определению диаметра молекулы
Презентация на тему Опыт по определению диаметра молекулы  Nutzen USB
Nutzen USB Северокавказский букварь как транслятор советской идеологии: 1927–1932 годы (на материалах редфонда ДГПБ)
Северокавказский букварь как транслятор советской идеологии: 1927–1932 годы (на материалах редфонда ДГПБ) Единицы массы. Тонна. Центнер (4 класс)
Единицы массы. Тонна. Центнер (4 класс) Rock & Roll
Rock & Roll Добрый день, мы приветствуем Вас на экскурсии по Древнему Риму!
Добрый день, мы приветствуем Вас на экскурсии по Древнему Риму! ПСИХОФИЗИОЛОГИЧЕСКИЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС «ФОБОС»®
ПСИХОФИЗИОЛОГИЧЕСКИЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС «ФОБОС»® ИКТ-инфраструктура
ИКТ-инфраструктура Школа ППМИ – 2022. Старт приоритетного регионального проекта Наш выбор
Школа ППМИ – 2022. Старт приоритетного регионального проекта Наш выбор Атака на короля при разных видах рокировки
Атака на короля при разных видах рокировки Теорема Пифагора. 8 класс
Теорема Пифагора. 8 класс Обработка металлов
Обработка металлов Светлое воскресение христово
Светлое воскресение христово ПОРТФОЛИОучителя физики
ПОРТФОЛИОучителя физики Поезд в Пушкинские горы. Проект создания трансферного узла
Поезд в Пушкинские горы. Проект создания трансферного узла Учет договоров ДОУ в новой версии системы ИС-ПРО 7.07
Учет договоров ДОУ в новой версии системы ИС-ПРО 7.07 Мониторинг и управление инфраструктурой ИТ на комплексных объектах ТЭК
Мониторинг и управление инфраструктурой ИТ на комплексных объектах ТЭК Школа Блогеров
Школа Блогеров Ребусы
Ребусы Волонтерский отряд«Исток»
Волонтерский отряд«Исток»