- Электрический привод. Регулирование координат

Содержание
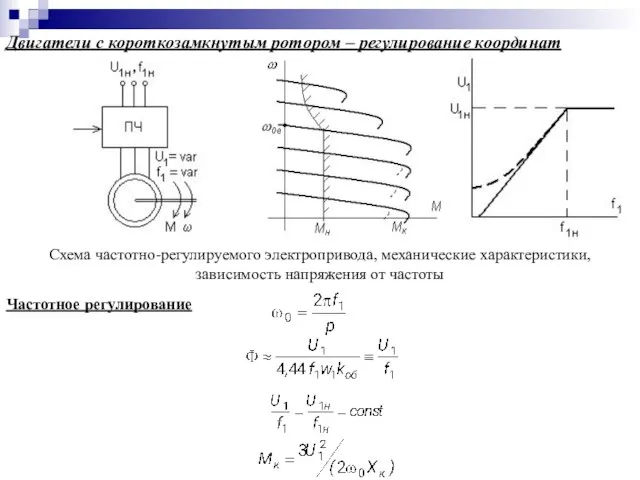
- 2. Двигатели с короткозамкнутым ротором – регулирование координат Схема частотно-регулируемого электропривода, механические характеристики, зависимость напряжения от частоты
- 3. Оценка частотного регулирования скорости: 1. Регулирование двухзонное – вниз и вверх (U1=U1н, f1>f1н) от основной скорости;
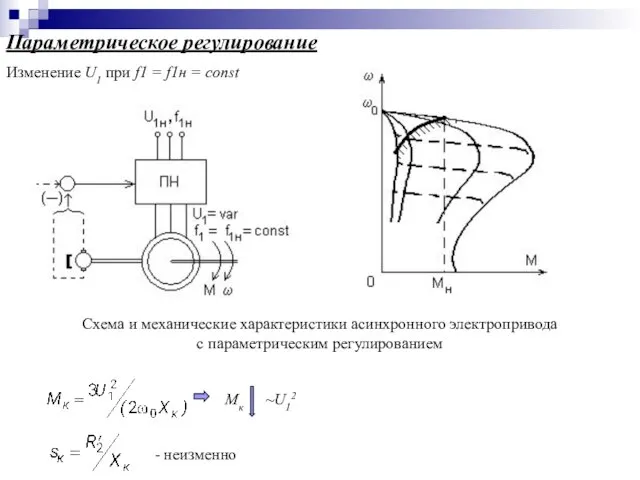
- 4. Параметрическое регулирование Изменение U1 при f1 = f1н = const Схема и механические характеристики асинхронного электропривода
- 5. Оценка способа регулирования: 1. Регулирование однозонное – вниз от основной скорости; 2. Диапазон регулирования в замкнутой
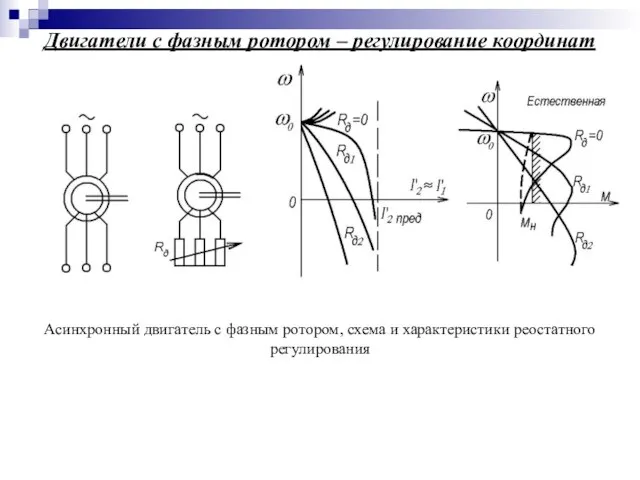
- 6. Двигатели с фазным ротором – регулирование координат Асинхронный двигатель с фазным ротором, схема и характеристики реостатного
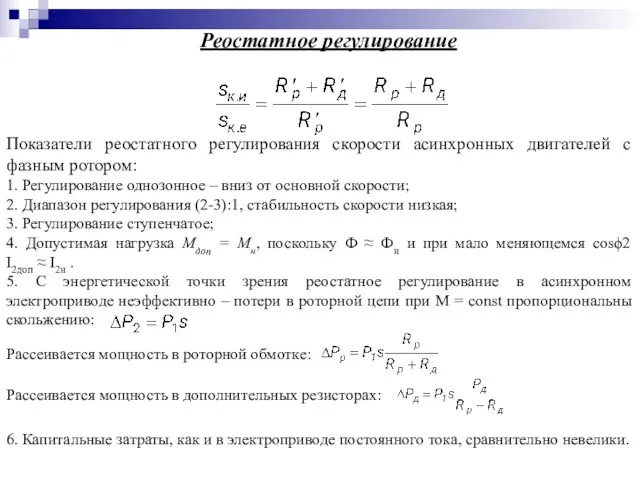
- 7. Реостатное регулирование Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором: 1. Регулирование однозонное – вниз
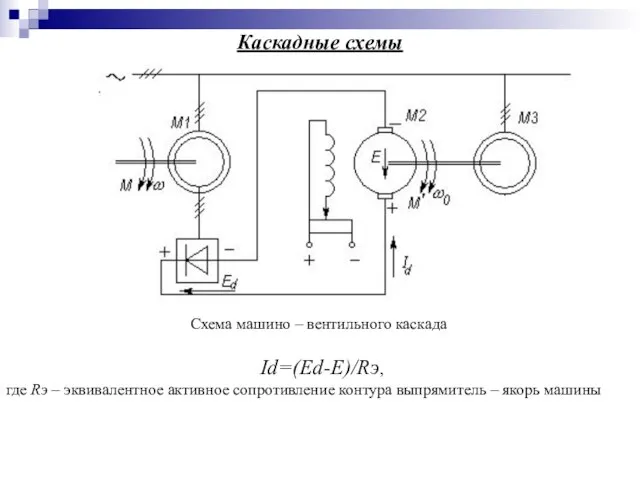
- 8. Каскадные схемы Id=(Ed-E)/Rэ, где Rэ – эквивалентное активное сопротивление контура выпрямитель – якорь машины Схема машино
- 10. Скачать презентацию
Слайд 2Двигатели с короткозамкнутым ротором – регулирование координат
Схема частотно-регулируемого электропривода, механические характеристики,
Двигатели с короткозамкнутым ротором – регулирование координат
Схема частотно-регулируемого электропривода, механические характеристики,
Слайд 3Оценка частотного регулирования скорости:
1. Регулирование двухзонное – вниз и вверх (U1=U1н, f1>f1н)
Оценка частотного регулирования скорости:
1. Регулирование двухзонное – вниз и вверх (U1=U1н, f1>f1н)
Слайд 4Параметрическое регулирование
Изменение U1 при f1 = f1н = const
Схема и механические
Параметрическое регулирование
Изменение U1 при f1 = f1н = const
Схема и механические
Слайд 5Оценка способа регулирования:
1. Регулирование однозонное – вниз от основной скорости;
2. Диапазон регулирования
Оценка способа регулирования:
1. Регулирование однозонное – вниз от основной скорости;
2. Диапазон регулирования
Слайд 6Двигатели с фазным ротором – регулирование координат
Асинхронный двигатель с фазным ротором, схема
Двигатели с фазным ротором – регулирование координат
Асинхронный двигатель с фазным ротором, схема
Слайд 7Реостатное регулирование
Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором:
1. Регулирование
Реостатное регулирование
Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором:
1. Регулирование
Слайд 8Каскадные схемы
Id=(Ed-E)/Rэ,
где Rэ – эквивалентное активное сопротивление контура выпрямитель
Каскадные схемы
Id=(Ed-E)/Rэ,
где Rэ – эквивалентное активное сопротивление контура выпрямитель
 Дыши легко!
Дыши легко! Рисуем весенний пейзаж
Рисуем весенний пейзаж Педагогические технологии
Педагогические технологии Я-концепция как основа жизненного стиля
Я-концепция как основа жизненного стиля Формирование доходов работников организации
Формирование доходов работников организации Презентация на тему Великая Отечественная Война 1941-1945
Презентация на тему Великая Отечественная Война 1941-1945 Электролиз растворов
Электролиз растворов Набережночелнинское местное отделение Всероссийской политической партии «ЕДИНАЯ РОССИЯ»
Набережночелнинское местное отделение Всероссийской политической партии «ЕДИНАЯ РОССИЯ» Экстрасенсорное общение
Экстрасенсорное общение Аутизм
Аутизм SQL-01-1 (Литература и ресурсы)
SQL-01-1 (Литература и ресурсы) Геометрия вокруг нас 8 класс
Геометрия вокруг нас 8 класс Подготовила Нателла Ахвердиева ученица 6 класса школы № 27 город Гянджа 2012
Подготовила Нателла Ахвердиева ученица 6 класса школы № 27 город Гянджа 2012 Тактика подразделений войсковой ПВО. Организация и проведение занятий по тактической подготовке
Тактика подразделений войсковой ПВО. Организация и проведение занятий по тактической подготовке Язык как развивающеесяявление
Язык как развивающеесяявление Презентация на тему Анна Ахматова Реквием
Презентация на тему Анна Ахматова Реквием Мечеть Бекет-ата
Мечеть Бекет-ата Диагностические методы изучения личности учащегося
Диагностические методы изучения личности учащегося ФОРМИРУЕМЫЕ КОМПЕТЕНЦИИПЕРВЫЙ ГОД ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА
ФОРМИРУЕМЫЕ КОМПЕТЕНЦИИПЕРВЫЙ ГОД ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА 5 государственных услуг в сфере здравоохранения
5 государственных услуг в сфере здравоохранения Презентация на тему Экологическая экспертиза и ее значение в правовом механизме охраны окружающей среды
Презентация на тему Экологическая экспертиза и ее значение в правовом механизме охраны окружающей среды Архитектура
Архитектура Жизнь и творчество В.В. Маяковского
Жизнь и творчество В.В. Маяковского Сварка стыковых и угловых швов в нижнем положении
Сварка стыковых и угловых швов в нижнем положении ООО НПО Станкостроение, г. Стерлитамак. Приглашает на работу
ООО НПО Станкостроение, г. Стерлитамак. Приглашает на работу Методы исследования генетики человека
Методы исследования генетики человека Магистрально-модульный принцип построения компьютера
Магистрально-модульный принцип построения компьютера В царстве грибов
В царстве грибов