- Графический исполнитель Робот в среде КуМир

Содержание
- 2. Интернет-ресурсы Среда КуМир https://www.niisi.ru/kumir/ Разработки занятий http://easyinformatics.ru/category/ispolnitel-robot http://pro-inf.ucoz.ru/index/kumir/0-13 (видео)
- 3. Среда КуМир КуМир (Комплект Учебных МИРов) – система программирования, предназначенная для поддержки начальных курсов информатики и
- 4. Среда КуМир В системе КуМир используется школьный алгоритмический язык с русской лексикой и встроенными исполнителями Робот
- 5. Среда КуМир В системе КуМир используется школьный алгоритмический язык с русской лексикой и встроенными исполнителями Робот
- 6. Описание исполнителя Среда исполнителя: Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости, разбитой на клетки.
- 7. Описание исполнителя Команда ветвления: если условие то серия команд иначе серия команд все Команда цикла: нц
- 8. Порядок создания алгоритма: 1.Командами Инструменты-Редактировать стартовую обстановку нарисовать на поле Робота стены и установить Робота в
- 9. Практическая работа «Составление линейных алгоритмов» Задания: 1.Робот в произвольной точке поля. Закрасить клетку сверху, снизу и
- 10. Практическая работа «Ветвление» Задание: дано: Робот в квадрате 6х6, огороженном стенами. надо: Закрасить клетку, огражденную снизу
- 11. Практическая работа «Составление и отладка циклических алгоритмов» 1. Составьте алгоритм, закрашивающий все внутренние клетки, прилегающие к
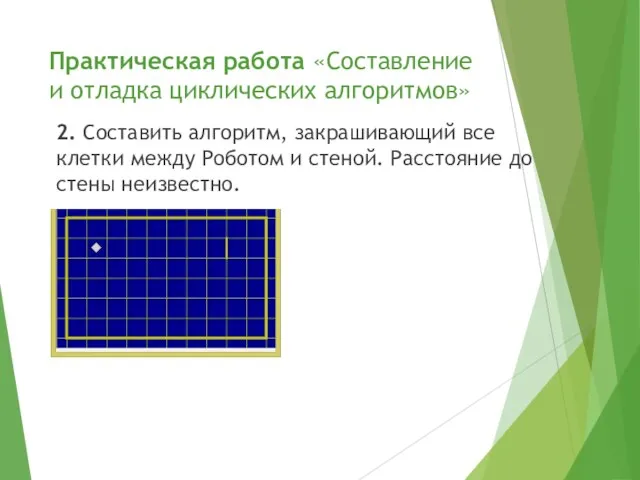
- 12. Практическая работа «Составление и отладка циклических алгоритмов» 2. Составить алгоритм, закрашивающий все клетки между Роботом и
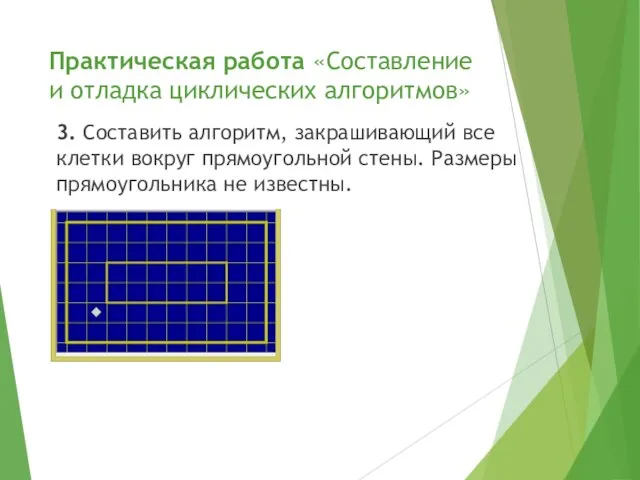
- 13. Практическая работа «Составление и отладка циклических алгоритмов» 3. Составить алгоритм, закрашивающий все клетки вокруг прямоугольной стены.
- 14. Практическая работа «Составление и отладка циклических алгоритмов» 4. Исполнитель Робот умеет перемещаться по лабиринту, начерченному на
- 15. Практическая работа «Составление и отладка циклических алгоритмов» Ещё четыре команды — это команды проверки условий. Эти
- 16. Практическая работа «Составление и отладка циклических алгоритмов» В одном условии можно использовать несколько команд проверки условий,
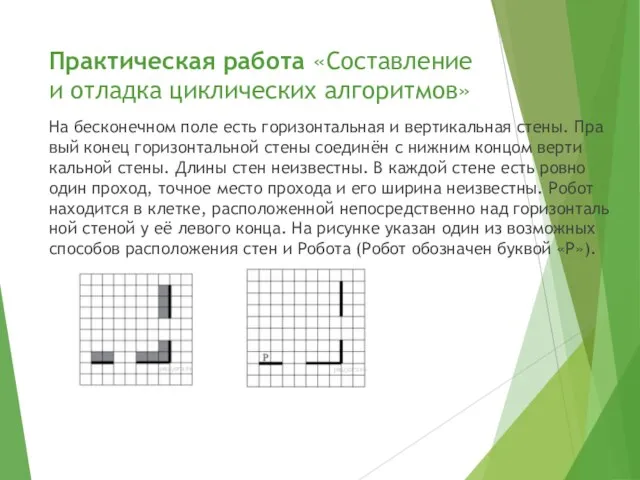
- 17. Практическая работа «Составление и отладка циклических алгоритмов» На бесконечном поле есть горизонтальная и вертикальная стены. Правый
- 19. Скачать презентацию
Слайд 2Интернет-ресурсы
Среда КуМир
https://www.niisi.ru/kumir/
Разработки занятий
http://easyinformatics.ru/category/ispolnitel-robot
http://pro-inf.ucoz.ru/index/kumir/0-13 (видео)
Интернет-ресурсы
Среда КуМир
https://www.niisi.ru/kumir/
Разработки занятий
http://easyinformatics.ru/category/ispolnitel-robot
http://pro-inf.ucoz.ru/index/kumir/0-13 (видео)
Слайд 3Среда КуМир
КуМир (Комплект Учебных МИРов) – система программирования, предназначенная для поддержки начальных курсов
Среда КуМир
КуМир (Комплект Учебных МИРов) – система программирования, предназначенная для поддержки начальных курсов
Слайд 4Среда КуМир
В системе КуМир используется школьный алгоритмический язык с русской лексикой и
Среда КуМир
В системе КуМир используется школьный алгоритмический язык с русской лексикой и
Слайд 5Среда КуМир
В системе КуМир используется школьный алгоритмический язык с русской лексикой и
Среда КуМир
В системе КуМир используется школьный алгоритмический язык с русской лексикой и
Слайд 6Описание исполнителя
Среда исполнителя: Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости,
Описание исполнителя
Среда исполнителя: Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости,
Слайд 7Описание исполнителя
Команда ветвления:
если условие то
серия команд
иначе
серия команд
все
Команда цикла:
нц пока
Описание исполнителя
Команда ветвления:
если условие то
серия команд
иначе
серия команд
все
Команда цикла:
нц пока
Слайд 8Порядок создания алгоритма:
1.Командами Инструменты-Редактировать стартовую обстановку нарисовать на поле Робота стены и
Порядок создания алгоритма:
1.Командами Инструменты-Редактировать стартовую обстановку нарисовать на поле Робота стены и
Слайд 9Практическая работа «Составление линейных алгоритмов»
Задания:
1.Робот в произвольной точке поля. Закрасить клетку
Практическая работа «Составление линейных алгоритмов»
Задания:
1.Робот в произвольной точке поля. Закрасить клетку
Слайд 10Практическая работа «Ветвление»
Задание:
дано: Робот в квадрате 6х6, огороженном стенами.
надо: Закрасить клетку, огражденную
Практическая работа «Ветвление»
Задание:
дано: Робот в квадрате 6х6, огороженном стенами.
надо: Закрасить клетку, огражденную

Слайд 11Практическая работа «Составление и отладка циклических алгоритмов»
1. Составьте алгоритм, закрашивающий все внутренние
Практическая работа «Составление и отладка циклических алгоритмов»
1. Составьте алгоритм, закрашивающий все внутренние

Слайд 12Практическая работа «Составление и отладка циклических алгоритмов»
2. Составить алгоритм, закрашивающий все клетки
Практическая работа «Составление и отладка циклических алгоритмов»
2. Составить алгоритм, закрашивающий все клетки
Слайд 13Практическая работа «Составление и отладка циклических алгоритмов»
3. Составить алгоритм, закрашивающий все клетки
Практическая работа «Составление и отладка циклических алгоритмов»
3. Составить алгоритм, закрашивающий все клетки
Слайд 14Практическая работа «Составление и отладка циклических алгоритмов»
4. Исполнитель Робот умеет перемещаться по
Практическая работа «Составление и отладка циклических алгоритмов»
4. Исполнитель Робот умеет перемещаться по
Слайд 15Практическая работа «Составление и отладка циклических алгоритмов»
Ещё четыре команды — это команды проверки условий.
Практическая работа «Составление и отладка циклических алгоритмов»
Ещё четыре команды — это команды проверки условий.
Слайд 16Практическая работа «Составление и отладка циклических алгоритмов»
В одном условии можно использовать несколько
Практическая работа «Составление и отладка циклических алгоритмов»
В одном условии можно использовать несколько
Слайд 17Практическая работа «Составление и отладка циклических алгоритмов»
На бесконечном поле есть горизонтальная и
Практическая работа «Составление и отладка циклических алгоритмов»
На бесконечном поле есть горизонтальная и
 КОПОРАТИВНОЕ СООБЩЕСТВО В БЛОГОСФЕРЕ. АНАЛИЗ СИТУАЦИИ И ТЕНДЕНЦИЙ РАЗВИТИЯ. Игорь Ланской, CREATORIC
КОПОРАТИВНОЕ СООБЩЕСТВО В БЛОГОСФЕРЕ. АНАЛИЗ СИТУАЦИИ И ТЕНДЕНЦИЙ РАЗВИТИЯ. Игорь Ланской, CREATORIC Командно-административные методы управления государством
Командно-административные методы управления государством Расскажи свою МГИК историю!
Расскажи свою МГИК историю! Что и как изучает история Средних веков?
Что и как изучает история Средних веков? ENGLISH GRAMMAR FOR KIDS
ENGLISH GRAMMAR FOR KIDS Уникальные решения в сфере презентационных технологий для образовательных учреждений Unique presentation technology solutions for education.
Уникальные решения в сфере презентационных технологий для образовательных учреждений Unique presentation technology solutions for education. Государственное бюджетное образовательное учреждение города Москвы детский сад № 862 Заведующая Дегтярева Ольга Владимировна. С
Государственное бюджетное образовательное учреждение города Москвы детский сад № 862 Заведующая Дегтярева Ольга Владимировна. С МИНОБРНАУКИ РОССИИфедеральное государственное бюджетное образовательное учреждение высшего профессионального образования«Со
МИНОБРНАУКИ РОССИИфедеральное государственное бюджетное образовательное учреждение высшего профессионального образования«Со Периодонтит
Периодонтит Инновационные технологии во внеклассной работе по математике
Инновационные технологии во внеклассной работе по математике Презентация на тему Освоение культурного наследия
Презентация на тему Освоение культурного наследия  Социальное партнерство в сфере воспитания
Социальное партнерство в сфере воспитания Психология социальной работы
Психология социальной работы Проект межрегионального единого координационногоцентра помощи освободившимся заключённым
Проект межрегионального единого координационногоцентра помощи освободившимся заключённым Влияния шума на организм человека
Влияния шума на организм человека Физико-химические свойства алкинов
Физико-химические свойства алкинов Антивирусы TrustPort
Антивирусы TrustPort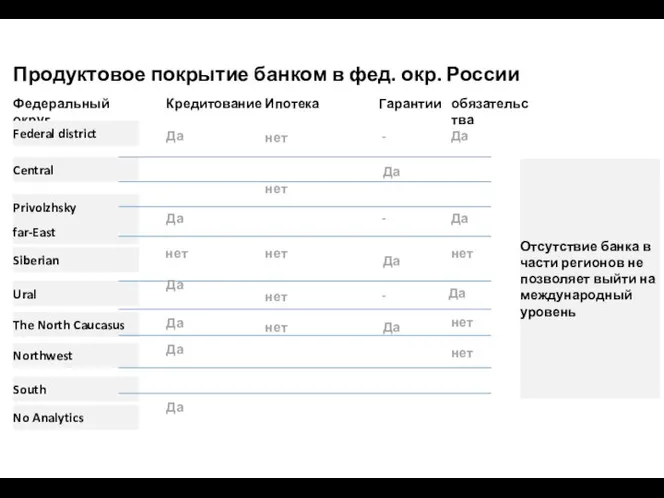 Продуктовое покрытие банком в Федеральном округе России
Продуктовое покрытие банком в Федеральном округе России Формы и методы взаимодействия воспитателя ДОУ с родителями воспитанников
Формы и методы взаимодействия воспитателя ДОУ с родителями воспитанников Синий и Оранжевый Современный Технология Презентация для Keynote
Синий и Оранжевый Современный Технология Презентация для Keynote Презентация на тему Past Perfect
Презентация на тему Past Perfect  Вещество номер один!
Вещество номер один! Интерактивная игра "Химический лабиринт"
Интерактивная игра "Химический лабиринт" На пути к профессиональному мастерству
На пути к профессиональному мастерству Презентация на тему Моногибридное скрещивание
Презентация на тему Моногибридное скрещивание Система воспитательной работы класса
Система воспитательной работы класса Бавкаева Булгун Доржиевна
Бавкаева Булгун Доржиевна 20140110_yaponskiy_sad_-_kopiya
20140110_yaponskiy_sad_-_kopiya