- ИЕРАРХИЧЕСКИЙ ПОДХОД В ЗАДАЧАХ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ НА ПЛОСКОСТИ

Содержание
- 2. КИИ-2010 Метрический топологический граф MT-GR= A – множество клеток, представляющее собой матрицу Am×n={aij}: aij=0 1, i,
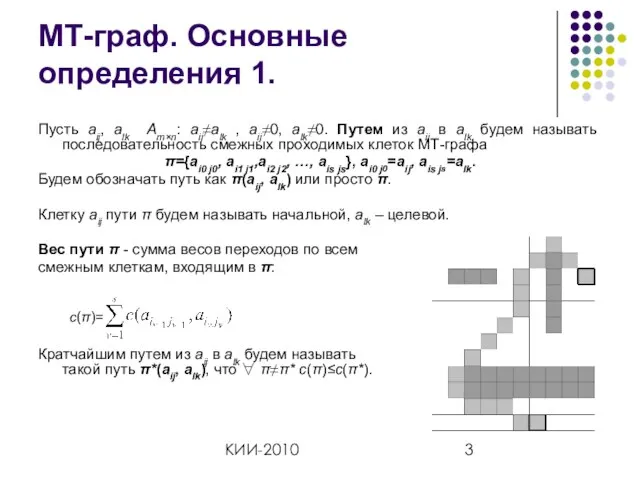
- 3. КИИ-2010 Пусть aij, alk Am×n: aij≠alk , aij≠0, alk≠0. Путем из aij в alk будем называть
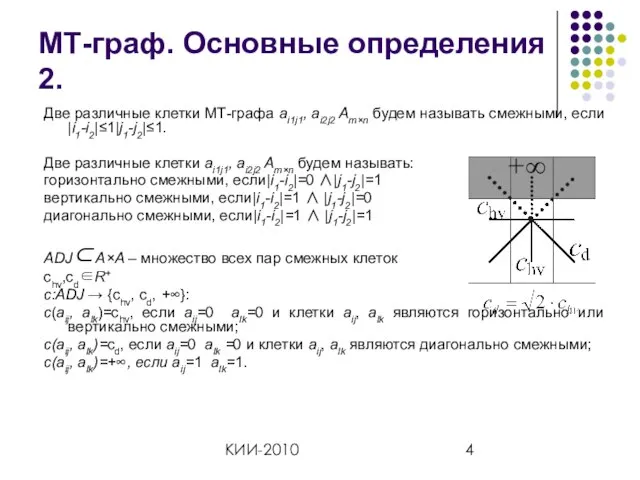
- 4. КИИ-2010 МТ-граф. Основные определения 2. Две различные клетки МТ-графа ai1j1, ai2j2 Am×n будем называть смежными, если
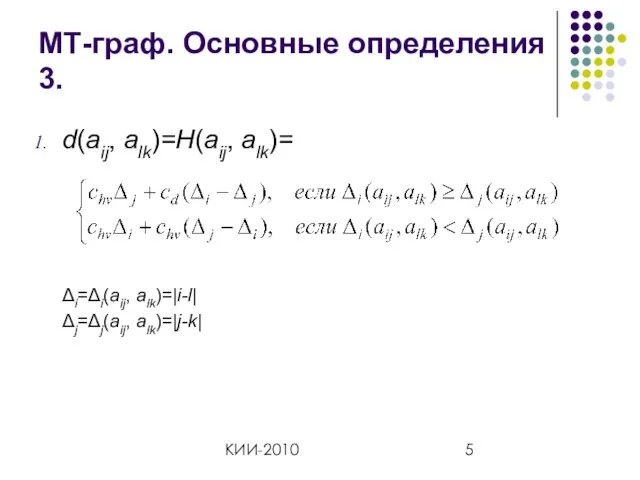
- 5. КИИ-2010 МТ-граф. Основные определения 3. d(aij, alk)=H(aij, alk)= Δi=Δi(aij, alk)=|i-l| Δj=Δj(aij, alk)=|j-k|
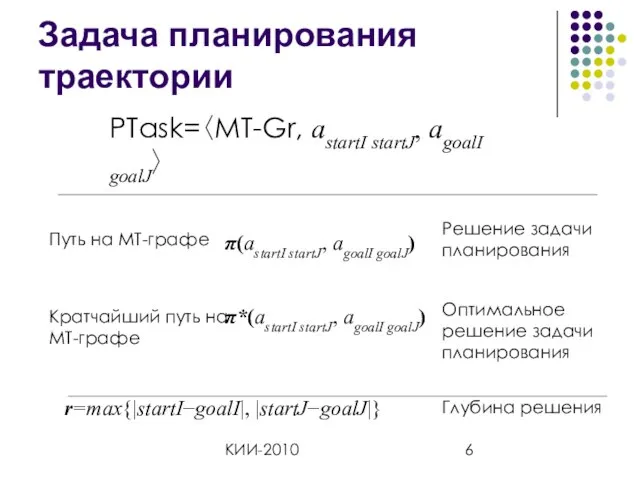
- 6. КИИ-2010 Задача планирования траектории PTask=〈MT-Gr, astartI startJ, agoalI goalJ〉 π(astartI startJ, agoalI goalJ) Решение задачи планирования
- 7. КИИ-2010 МТ-графы и взвешенные графы Любой МТ-граф может имплицировать взвешенный граф Все алгоритмы эвристического поиска, применимые
- 8. КИИ-2010 Алгоритмы семейства A* при поиске пути на МТ-графе Алгоритмическая сложность (как временная, так и емкостная)
- 9. КИИ-2010 Иерархический подход Разбить исходную задачу на упорядоченное множество «элементарных» подзадач
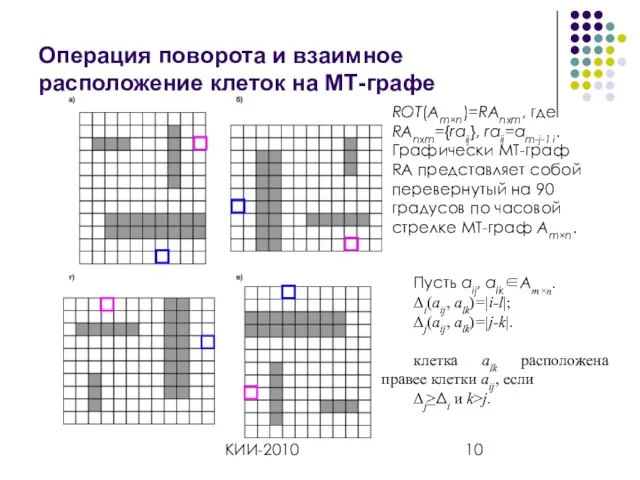
- 10. КИИ-2010 Операция поворота и взаимное расположение клеток на МТ-графе ROT(Am×n)=RAnxm, где RAnxm={raij}, raij=am-j-1 i. Графически МТ-граф
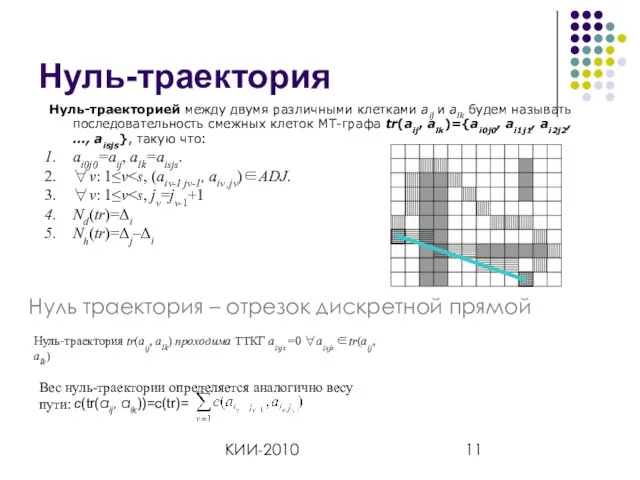
- 11. КИИ-2010 Нуль-траектория Нуль-траекторией между двумя различными клетками aij и alk будем называть последовательность смежных клеток МТ-графа
- 12. КИИ-2010 Препятствие Препятствия Obs={ai0j0, ai1j1, ai2j2, …, aisjs|аikjk=1, аikjk∈adj(аik-1jk-1) ∀k=0,1,2, …, s, s∈N}. Препятствие Obs лежит
- 13. КИИ-2010 Секция Секция - упорядоченная пара клеток МТ-графа Секция проходима ТТТК нуль-траектория tr(aij, akl) проходима Вес
- 14. КИИ-2010 Задача планирования Пусть на заданном МТ-графе MT-Gr зафиксированы начальная astartI startJ и целевая agoalI goalJ
- 15. КИИ-2010 Компоненты планирования Выделение опорных клеток Упорядочивание опорных клеток Выбор опорных клеток для формирования итогового решения
- 16. КИИ-2010 Вероятностный иерархический алгоритм планирования траектории Вход: PPС={PP={astartI startJ , agoalI goalJ }} – множество частичных
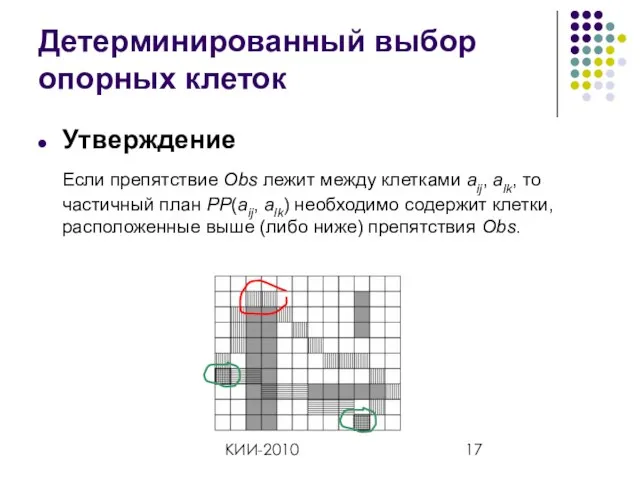
- 17. КИИ-2010 Детерминированный выбор опорных клеток Утверждение Если препятствие Obs лежит между клетками aij, alk, то частичный
- 18. КИИ-2010 Детерминированный выбор опорных клеток GetBaseCellsForExtension(cell s, cell g, cell X) int i_up, i_down, j_right, j_left=X.j-1;
- 19. КИИ-2010 HGA* Вход: PPС={PP={astartI startJ , agoalI goalJ }} Шаг 1. Выбрать лучший частичный путь PP
- 20. КИИ-2010 Емкостная сложность HGA* «Хранить» клетку – O(1) A* – O(r2) Obs: 2+4*Obs Obs ≤ r/2
- 21. КИИ-2010 Препятствия нетривиальной формы Обход контура препятствия по (против) часовой стрелке от клетки X до «первого
- 22. КИИ-2010
- 23. КИИ-2010 Препятствия нетривиальной формы
- 24. КИИ-2010 Экспериментальные результаты. 3 серии экспериментов МТ-графы различных размеров с различной степенью заполнения препятствиями МТ-графы –
- 25. КИИ-2010 Экспериментальные результаты. Алгоритмы HGA*, A*, WA*-3, WA*-5 Отслеживаемые индикаторы Q – число сохраненных клеток W
- 26. КИИ-2010 1 серия экспериментов. λ=[(l⋅2+d⋅4)⋅N]/(m⋅n)
- 27. КИИ-2010 0,01
- 28. КИИ-2010 1 серия экспериментов. Результаты.
- 29. КИИ-2010 2 серия экспериментов Размер МТ-графа фиксирован 101х101 Глубина решения фиксирована 100 СЗП фиксирована λ =
- 30. КИИ-2010 0,05
- 31. КИИ-2010 3 серия экспериментов. Маловысотный полет вертолета. 2 МТ-графа (цифровые карты местности Москвы, 2х2 км) Глубина
- 32. КИИ-2010 3 серия экспериментов.
- 33. КИИ-2010 3 серия экспериментов.
- 34. КИИ-2010 0,13
- 35. КИИ-2010 Выводы по результатам экспериментов HGA* использует вычислительные ресурсы гораздо эффективней аналогов HGA* лучше масштабируется HGA*
- 37. Скачать презентацию
Слайд 2КИИ-2010
Метрический топологический граф
MT-GR=
A – множество клеток, представляющее собой матрицу Am×n={aij}:
КИИ-2010
Метрический топологический граф
MT-GR=
A – множество клеток, представляющее собой матрицу Am×n={aij}:

Слайд 3КИИ-2010
Пусть aij, alk Am×n: aij≠alk , aij≠0, alk≠0. Путем из aij в
КИИ-2010
Пусть aij, alk Am×n: aij≠alk , aij≠0, alk≠0. Путем из aij в
Слайд 4КИИ-2010
МТ-граф. Основные определения 2.
Две различные клетки МТ-графа ai1j1, ai2j2 Am×n будем называть
КИИ-2010
МТ-граф. Основные определения 2.
Две различные клетки МТ-графа ai1j1, ai2j2 Am×n будем называть
Слайд 5КИИ-2010
МТ-граф. Основные определения 3.
d(aij, alk)=H(aij, alk)=
Δi=Δi(aij, alk)=|i-l|
Δj=Δj(aij, alk)=|j-k|
КИИ-2010
МТ-граф. Основные определения 3.
d(aij, alk)=H(aij, alk)=
Δi=Δi(aij, alk)=|i-l|
Δj=Δj(aij, alk)=|j-k|
Слайд 6КИИ-2010
Задача планирования траектории
PTask=〈MT-Gr, astartI startJ, agoalI goalJ〉
π(astartI startJ, agoalI goalJ)
Решение задачи
КИИ-2010
Задача планирования траектории
PTask=〈MT-Gr, astartI startJ, agoalI goalJ〉
π(astartI startJ, agoalI goalJ)
Решение задачи
Слайд 7КИИ-2010
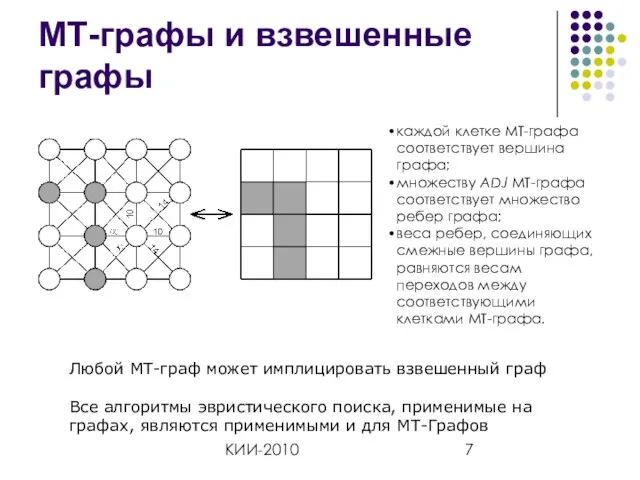
МТ-графы и взвешенные графы
Любой МТ-граф может имплицировать взвешенный граф
Все алгоритмы эвристического поиска,
КИИ-2010
МТ-графы и взвешенные графы
Любой МТ-граф может имплицировать взвешенный граф
Все алгоритмы эвристического поиска,
Слайд 8КИИ-2010
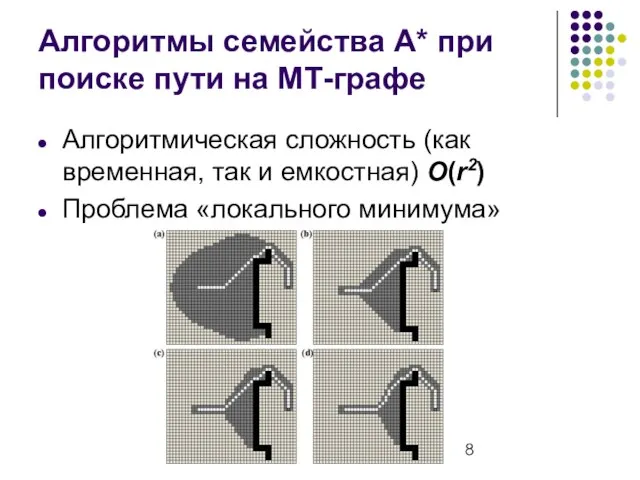
Алгоритмы семейства A* при поиске пути на МТ-графе
Алгоритмическая сложность (как временная, так
КИИ-2010
Алгоритмы семейства A* при поиске пути на МТ-графе
Алгоритмическая сложность (как временная, так
Слайд 9КИИ-2010
Иерархический подход
Разбить исходную задачу на упорядоченное множество «элементарных» подзадач
КИИ-2010
Иерархический подход
Разбить исходную задачу на упорядоченное множество «элементарных» подзадач

Слайд 10КИИ-2010
Операция поворота и взаимное расположение клеток на МТ-графе
ROT(Am×n)=RAnxm, где RAnxm={raij}, raij=am-j-1 i.
КИИ-2010
Операция поворота и взаимное расположение клеток на МТ-графе
ROT(Am×n)=RAnxm, где RAnxm={raij}, raij=am-j-1 i.
Слайд 11КИИ-2010
Нуль-траектория
Нуль-траекторией между двумя различными клетками aij и alk будем называть последовательность смежных
КИИ-2010
Нуль-траектория
Нуль-траекторией между двумя различными клетками aij и alk будем называть последовательность смежных
Слайд 12КИИ-2010
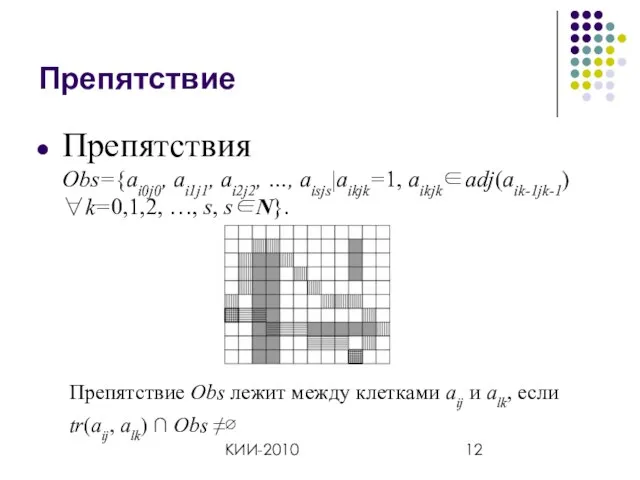
Препятствие
Препятствия
Obs={ai0j0, ai1j1, ai2j2, …, aisjs|аikjk=1, аikjk∈adj(аik-1jk-1) ∀k=0,1,2, …, s, s∈N}.
Препятствие Obs лежит
КИИ-2010
Препятствие
Препятствия
Obs={ai0j0, ai1j1, ai2j2, …, aisjs|аikjk=1, аikjk∈adj(аik-1jk-1) ∀k=0,1,2, …, s, s∈N}.
Препятствие Obs лежит
Слайд 13КИИ-2010
Секция
Секция - упорядоченная пара клеток МТ-графа
Секция проходима ТТТК
КИИ-2010
Секция
Секция
Секция
Слайд 14КИИ-2010
Задача планирования
Пусть на заданном МТ-графе MT-Gr зафиксированы начальная
astartI startJ и целевая
КИИ-2010
Задача планирования
Пусть на заданном МТ-графе MT-Gr зафиксированы начальная
astartI startJ и целевая
Слайд 15КИИ-2010
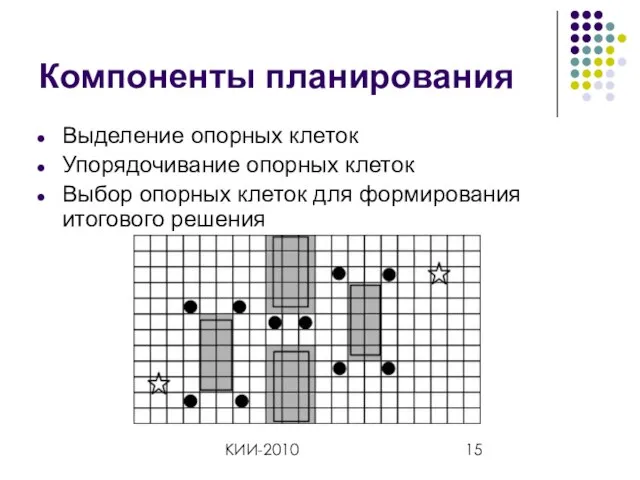
Компоненты планирования
Выделение опорных клеток
Упорядочивание опорных клеток
Выбор опорных клеток для формирования итогового решения
КИИ-2010
Компоненты планирования
Выделение опорных клеток
Упорядочивание опорных клеток
Выбор опорных клеток для формирования итогового решения
Слайд 16КИИ-2010
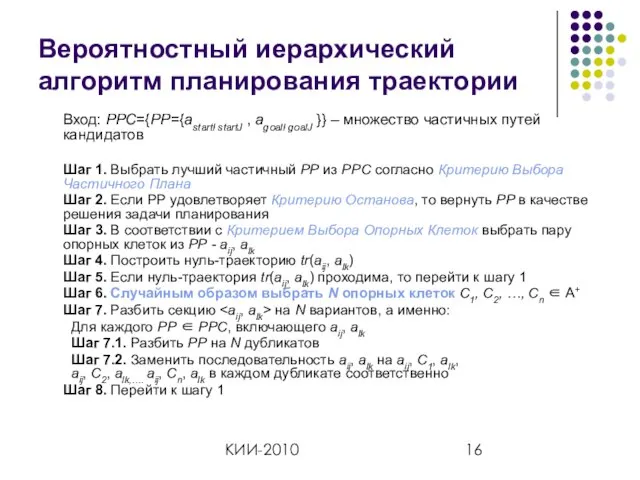
Вероятностный иерархический алгоритм планирования траектории
Вход: PPС={PP={astartI startJ , agoalI goalJ }} –
КИИ-2010
Вероятностный иерархический алгоритм планирования траектории
Вход: PPС={PP={astartI startJ , agoalI goalJ }} –
Слайд 17КИИ-2010
Детерминированный выбор опорных клеток
Утверждение
Если препятствие Obs лежит между клетками aij, alk, то
КИИ-2010
Детерминированный выбор опорных клеток
Утверждение
Если препятствие Obs лежит между клетками aij, alk, то
Слайд 18КИИ-2010
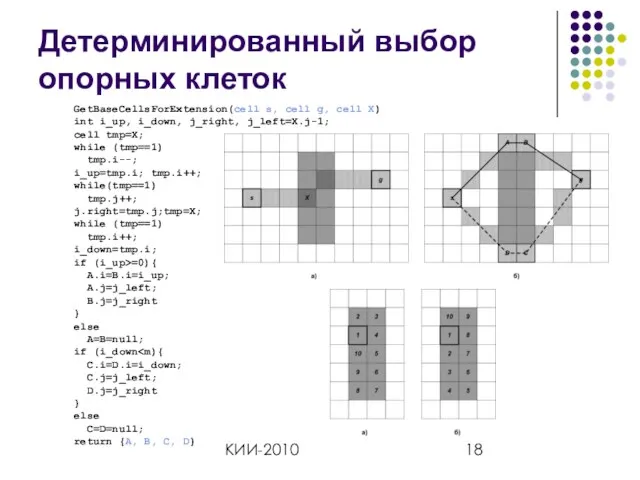
Детерминированный выбор опорных клеток
GetBaseCellsForExtension(cell s, cell g, cell X)
int i_up, i_down, j_right,
КИИ-2010
Детерминированный выбор опорных клеток
GetBaseCellsForExtension(cell s, cell g, cell X)
int i_up, i_down, j_right,
Слайд 19КИИ-2010
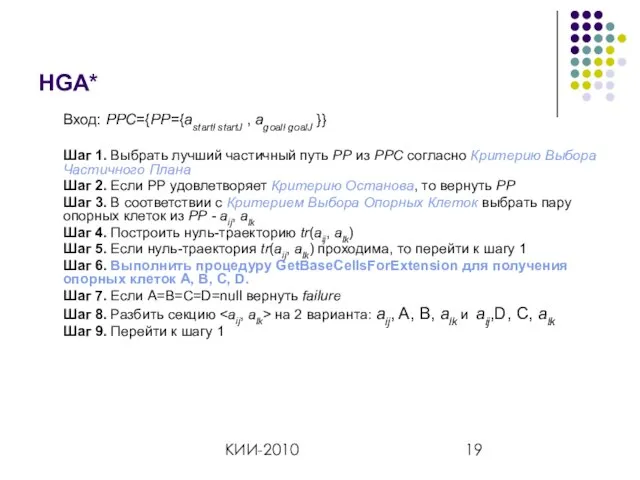
HGA*
Вход: PPС={PP={astartI startJ , agoalI goalJ }}
Шаг 1. Выбрать лучший частичный
КИИ-2010
HGA*
Вход: PPС={PP={astartI startJ , agoalI goalJ }}
Шаг 1. Выбрать лучший частичный
Слайд 20КИИ-2010
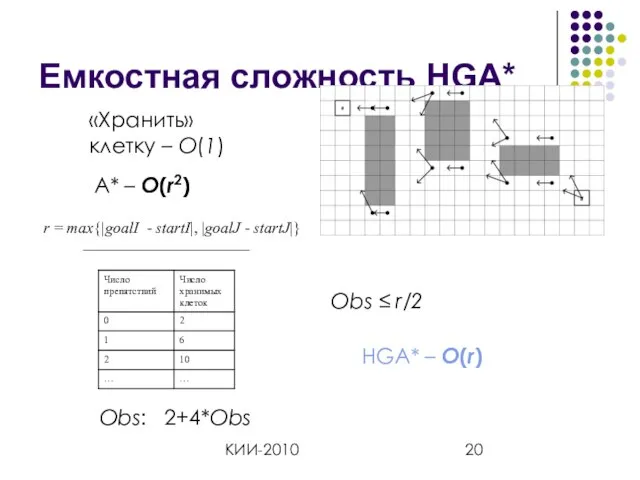
Емкостная сложность HGA*
«Хранить» клетку – O(1)
A* – O(r2)
Obs: 2+4*Obs
Obs ≤ r/2
r =
КИИ-2010
Емкостная сложность HGA*
«Хранить» клетку – O(1)
A* – O(r2)
Obs: 2+4*Obs
Obs ≤ r/2
r =
Слайд 21КИИ-2010
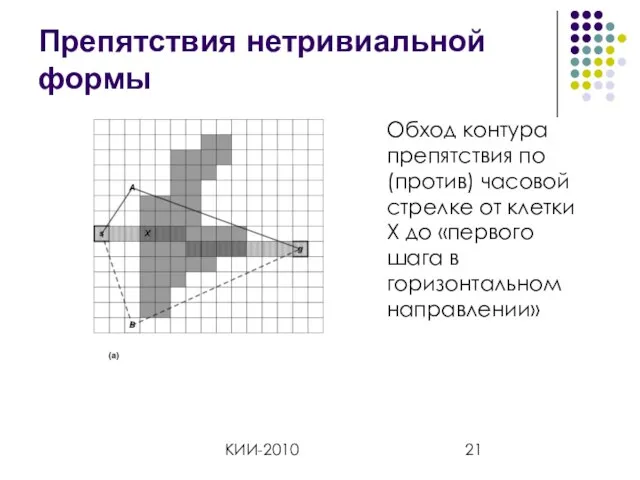
Препятствия нетривиальной формы
Обход контура препятствия по (против) часовой стрелке от клетки X
КИИ-2010
Препятствия нетривиальной формы
Обход контура препятствия по (против) часовой стрелке от клетки X
Слайд 22КИИ-2010
КИИ-2010
Слайд 23КИИ-2010
Препятствия нетривиальной формы
КИИ-2010
Препятствия нетривиальной формы

Слайд 24КИИ-2010
Экспериментальные результаты.
3 серии экспериментов
МТ-графы различных размеров с различной степенью заполнения препятствиями
МТ-графы
КИИ-2010
Экспериментальные результаты.
3 серии экспериментов
МТ-графы различных размеров с различной степенью заполнения препятствиями
МТ-графы
Слайд 25КИИ-2010
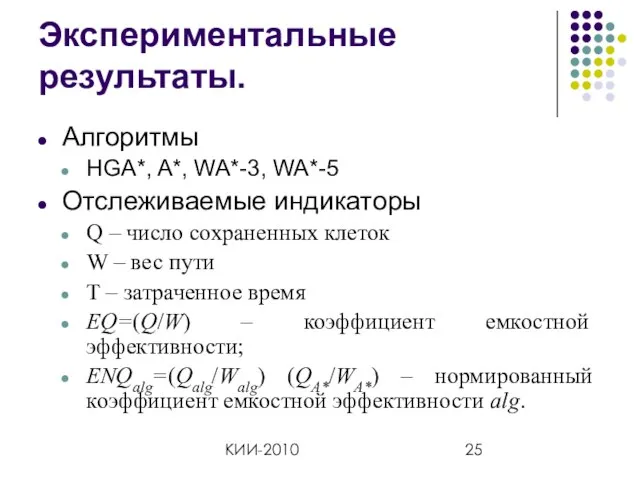
Экспериментальные результаты.
Алгоритмы
HGA*, A*, WA*-3, WA*-5
Отслеживаемые индикаторы
Q – число сохраненных клеток
W – вес
КИИ-2010
Экспериментальные результаты.
Алгоритмы
HGA*, A*, WA*-3, WA*-5
Отслеживаемые индикаторы
Q – число сохраненных клеток
W – вес
Слайд 26КИИ-2010
1 серия экспериментов.
λ=[(l⋅2+d⋅4)⋅N]/(m⋅n)
КИИ-2010
1 серия экспериментов.
λ=[(l⋅2+d⋅4)⋅N]/(m⋅n)
![КИИ-2010 1 серия экспериментов. λ=[(l⋅2+d⋅4)⋅N]/(m⋅n)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460516/slide-25.jpg)
Слайд 27КИИ-2010
0,01
КИИ-2010
0,01

Слайд 28КИИ-2010
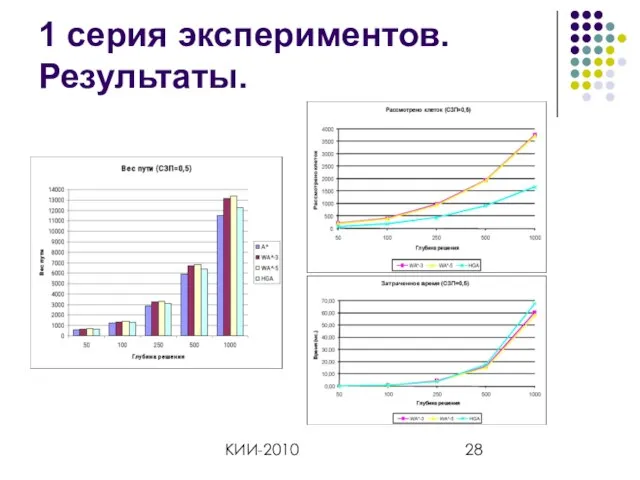
1 серия экспериментов. Результаты.
КИИ-2010
1 серия экспериментов. Результаты.
Слайд 29КИИ-2010
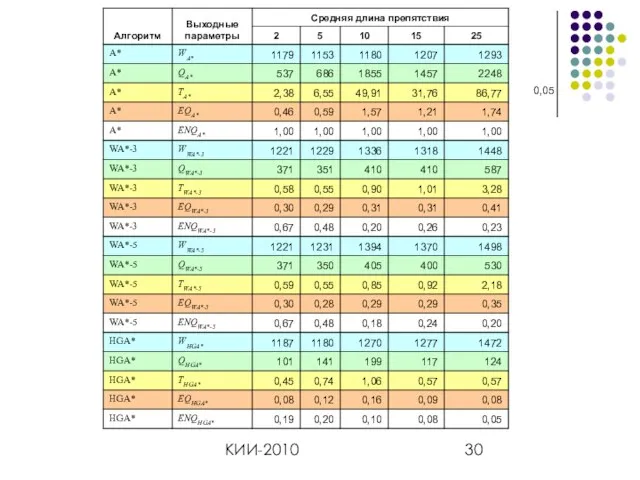
2 серия экспериментов
Размер МТ-графа фиксирован 101х101
Глубина решения фиксирована 100
СЗП фиксирована λ =
КИИ-2010
2 серия экспериментов
Размер МТ-графа фиксирован 101х101
Глубина решения фиксирована 100
СЗП фиксирована λ =
Слайд 30КИИ-2010
0,05
КИИ-2010
0,05
Слайд 31КИИ-2010
3 серия экспериментов. Маловысотный полет вертолета.
2 МТ-графа (цифровые карты местности Москвы, 2х2
КИИ-2010
3 серия экспериментов. Маловысотный полет вертолета.
2 МТ-графа (цифровые карты местности Москвы, 2х2
Слайд 32КИИ-2010
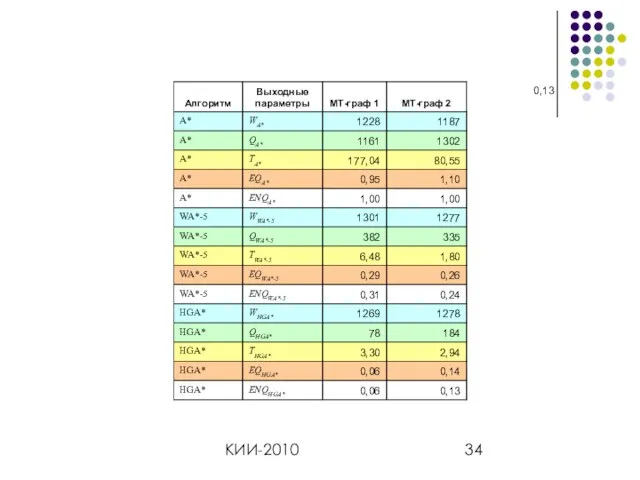
3 серия экспериментов.
КИИ-2010
3 серия экспериментов.

Слайд 33КИИ-2010
3 серия экспериментов.
КИИ-2010
3 серия экспериментов.

Слайд 34КИИ-2010
0,13
КИИ-2010
0,13
Слайд 35КИИ-2010
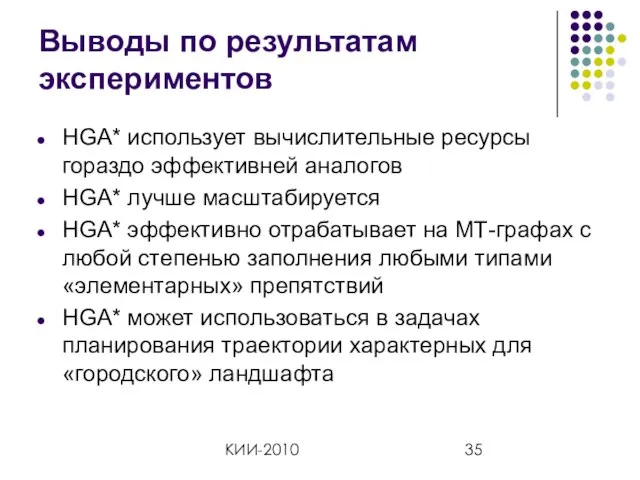
Выводы по результатам экспериментов
HGA* использует вычислительные ресурсы гораздо эффективней аналогов
HGA* лучше масштабируется
HGA*
КИИ-2010
Выводы по результатам экспериментов
HGA* использует вычислительные ресурсы гораздо эффективней аналогов
HGA* лучше масштабируется
HGA*
 Лев Николаевич Толстой
Лев Николаевич Толстой Разработка программ для обработки данных измерений in-situ (
Разработка программ для обработки данных измерений in-situ ( Экспресс-разработка модели компетенций
Экспресс-разработка модели компетенций Пусть не будет войны никогда Внеклассное мероприятие посвящённое ко Дню Победы в IV классе.
Пусть не будет войны никогда Внеклассное мероприятие посвящённое ко Дню Победы в IV классе. Влияние ультразвуковой обработки и наводороживания на усталостную долговечность и ударную вязкость сплава Ti-6Al-4V
Влияние ультразвуковой обработки и наводороживания на усталостную долговечность и ударную вязкость сплава Ti-6Al-4V Анализ работы социального педагога Косаревой Л.Г. 2010-2011 учебный год
Анализ работы социального педагога Косаревой Л.Г. 2010-2011 учебный год Правописание НЕ с причастиями
Правописание НЕ с причастиями Ударение. Делаем правильно.
Ударение. Делаем правильно. Презентация на тему Тип ПРОСТЕЙШИЕ
Презентация на тему Тип ПРОСТЕЙШИЕ  Здравствуйте! Меня зовут Ершова Людмила Алексеевна.
Здравствуйте! Меня зовут Ершова Людмила Алексеевна. Дистанционные занятия рукопашным боем для детей возрастом 8 - 9 лет
Дистанционные занятия рукопашным боем для детей возрастом 8 - 9 лет Презентация на тему Знакомство дошкольников с безопасным поведением на улицах города и правилами дорожного движения
Презентация на тему Знакомство дошкольников с безопасным поведением на улицах города и правилами дорожного движения Презентация на тему Использование нанотехнологий в исследовательской деятельности обучающихся лицея
Презентация на тему Использование нанотехнологий в исследовательской деятельности обучающихся лицея Влияние загрязнения на живые организмы
Влияние загрязнения на живые организмы Модульная технология обучения
Модульная технология обучения Cookbook. Christmas Eve Recipes
Cookbook. Christmas Eve Recipes Система права
Система права ООО «ДОК 2» новые технологии, новое качество! Продолжатель традицийООО «Озерский деревообрабатывающий комбинат»
ООО «ДОК 2» новые технологии, новое качество! Продолжатель традицийООО «Озерский деревообрабатывающий комбинат» Финансовое планирование и прогнозирование. (Тема 3)
Финансовое планирование и прогнозирование. (Тема 3) звездный час
звездный час Презентация на тему История новогодних игрушек
Презентация на тему История новогодних игрушек Food truck logo
Food truck logo Эхо холодной войны
Эхо холодной войны Гражданская позиция
Гражданская позиция Сложноподчиненные предложения.
Сложноподчиненные предложения. Письмо
Письмо Организация взаимодействия МОУ «СОШ № 56 г.Орска» с родителями и представителями общественности
Организация взаимодействия МОУ «СОШ № 56 г.Орска» с родителями и представителями общественности Дачный дом (фотографии)
Дачный дом (фотографии)