- ИНТЕЛЛЕКТУАЛЬНЫЕ РОБОТЫСОСТОЯНИЕ И ПЕРСПЕКТИВЫ

Содержание
- 2. 3 поколения роботов: Программные. Жестко заданная программа (циклограмма). Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в зависимости от
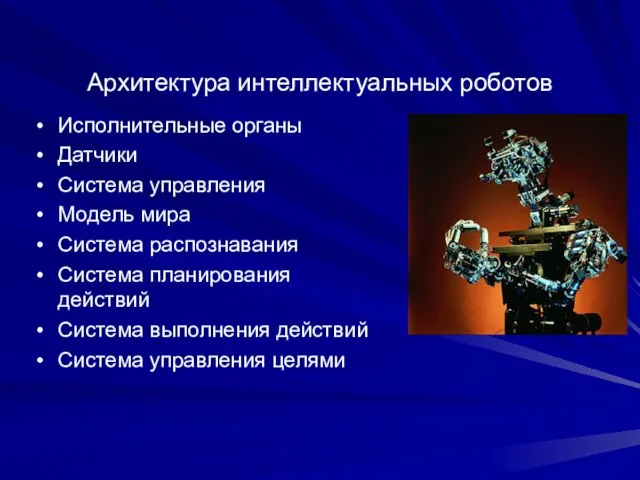
- 3. Архитектура интеллектуальных роботов Исполнительные органы Датчики Система управления Модель мира Система распознавания Система планирования действий Система
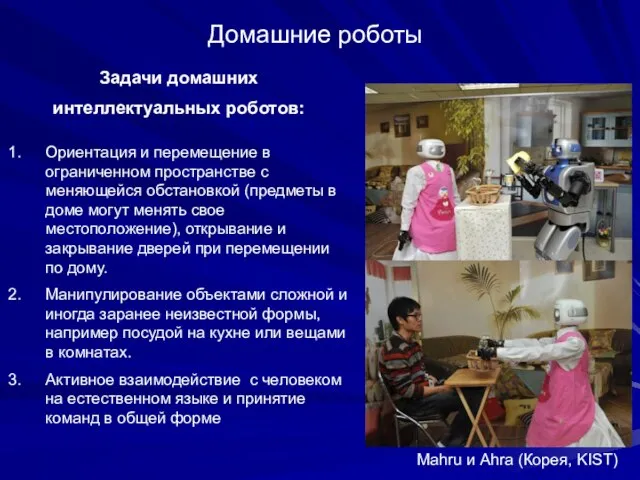
- 4. Домашние роботы Ориентация и перемещение в ограниченном пространстве с меняющейся обстановкой (предметы в доме могут менять
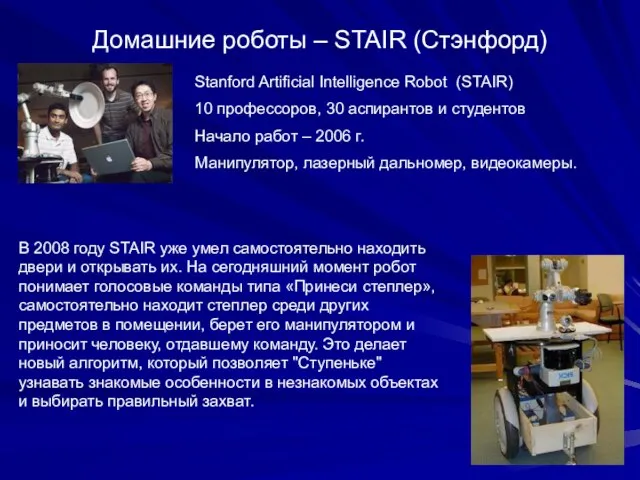
- 5. Домашние роботы – STAIR (Стэнфорд) Stanford Artificial Intelligence Robot (STAIR) 10 профессоров, 30 аспирантов и студентов
- 6. Домашние роботы – PR2 (Willow Garage) Эта робототехническая платформа призвана помочь исследователям в том, чтобы не
- 7. Домашние роботы – PR2 (Willow Garage) PR2 умеет втыкать вилку в розетку Учёные из Калифорнийского университета
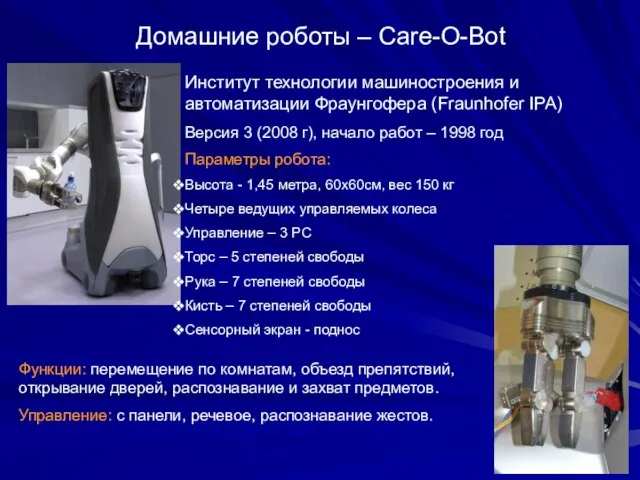
- 8. Домашние роботы – Care-O-Bot Институт технологии машиностроения и автоматизации Фраунгофера (Fraunhofer IPA) Версия 3 (2008 г),
- 9. Домашние роботы IRT (Япония) Panasonic ReadyBot (США)
- 10. Военные роботы США Планы DARPA по перевооружению армии: К 2015 году одна треть транспортных средств будет
- 11. Беспилотные летательные аппараты (БПЛА) 32 страны мира производят около 250 типов беспилотных самолетов и вертолетов RQ-7
- 12. Наземные боевые роботы Транспортный робот BigDog (Boston Dinamics) Боевой робот MAARS Робот-сапер PackBot 1700 единиц на
- 13. Морские роботы Подводный робот REMUS 100 (Hydroid) создано 200 экз. Выполняемые задачи: Обнаружение и уничтожение подлодок
- 14. Военные роботы (Россия) ТУ-300 МРК-27 - БТ Дозор-600 БЛА-05 «Типчак» Имеется много разработок БПЛА различных типов
- 15. Промышленные роботы К 2010 г. в мире разработано более 270 моделей промышленных роботов, выпущено 1 млн.
- 16. Космические роботы Robonaut -2 отправится на МКС в сентябре 2010 г. (разработчик General Motors) и станет
- 17. Роботы-охранники Патрулирование улиц Охрана помещений и зданий Воздушное наблюдение (БПЛА) SGR-1 (охрана корейской границы) Робот-охранник Reborg-Q
- 18. Роботы для игр Роботы-животные Роботы-игрушки Робот-собака AIBO (Sony) 2000-2007 г. Робот-динозавр PLEO Роботы-собаки
- 19. Роботы для медицины Обслуживание больниц Наблюдение за больными Развозчик лекарств MRK-03 (Япония)
- 20. Роботы для медицины- xирургические роботы Робот-хирург Da Vinci Разработчик - INTUITIVE SURGICAL INC (USA) 2006 год
- 21. Роботы для медицины - тренажеры для врачей Робот-пациент STAN (США) Робот дышит и говорит. И многих
- 22. Роботы для медицины - протезы Бионический протез руки i-Limb (Touch Bionics) удерживает до 90 килограммов нагрузки
- 23. Экзоскелеты (Япония) HAL-5 , 23 кг, 1.6м 2.5 часа работы Усиливает силу от 2 до 10
- 24. Экзоскелеты (Япония) Honda Walking assist – выпуск с 2009 г. вес – 6,5 килограмма (включая обувь
- 25. Экзоскелеты (США) Универсальный грузовой экзоскелет HULC (Human Universal Load Carrier exoskeleton) компании Lockheed Martin Позволяет переносить
- 26. Экзоскелеты Компания Rex Bionics (Новая зеландия) создала экзоскелет Rex (сокращение от Robotic Exoskeleton) в расчёте на
- 27. Соревнования DARPA Grand Challenge 2005 Призовой фонд $2 млн 212 км пересеченной местности за 10 часов
- 28. Соревнования DARPA Urban Challenge 2007 3 ноября 2007 года в местечке Викторвилль (Victorville, Калифорния) Участвовало 23
- 29. Соревнования MAGIC 2010 Роботы должны исследовать окружающую среду, строить подробные карты местности, планировать маршруты и совместные
- 30. Первые Международные Олимпийские Игры человекоподобных роботов Первые Международные Олимпийские Игры человекоподобных роботов (International Humanoid Robot Olympic
- 31. Футбол роботов Международная Федерация FIRA Ассоциация RoboCup : "Через 50 лет, в 2050 году, команда роботов-футболистов
- 32. Соревнования «Мобильные роботы» Институт механики в МГУ им. М.В.Ломоносова, МГУПИ Соревнования с маяками, движение по полосе
- 33. Соревнования EUROBOT Eurobot - крупнейшие ежегодные соревнования роботов в Европе ([EUROBOT]). Каждый год в них принимают
- 34. Открытый робототехнический турнир на кубок Политехнического музея Политехнический музей (г. Москва) с 2009 года ежегодно проводит
- 35. Тенденции развития В ближайшее десятилетие следует ожидать широкое распространение бытовых роботов. К 2025 году японский рынок
- 37. Скачать презентацию
Слайд 23 поколения роботов:
Программные. Жестко заданная программа (циклограмма).
Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в
3 поколения роботов:
Программные. Жестко заданная программа (циклограмма).
Адаптивные. Возможность автоматически перепрограммироваться (адаптироваться) в

Слайд 3Архитектура интеллектуальных роботов
Исполнительные органы
Датчики
Система управления
Модель мира
Система распознавания
Система планирования действий
Система выполнения действий
Система управления
Архитектура интеллектуальных роботов
Исполнительные органы
Датчики
Система управления
Модель мира
Система распознавания
Система планирования действий
Система выполнения действий
Система управления
Слайд 4Домашние роботы
Ориентация и перемещение в ограниченном пространстве с меняющейся обстановкой (предметы в
Домашние роботы
Ориентация и перемещение в ограниченном пространстве с меняющейся обстановкой (предметы в
Слайд 5Домашние роботы – STAIR (Стэнфорд)
Stanford Artificial Intelligence Robot (STAIR)
10 профессоров, 30 аспирантов
Домашние роботы – STAIR (Стэнфорд)
Stanford Artificial Intelligence Robot (STAIR)
10 профессоров, 30 аспирантов
Слайд 6Домашние роботы – PR2 (Willow Garage)
Эта робототехническая платформа призвана помочь исследователям в
Домашние роботы – PR2 (Willow Garage)
Эта робототехническая платформа призвана помочь исследователям в

Слайд 7Домашние роботы – PR2 (Willow Garage)
PR2 умеет втыкать вилку в розетку
Учёные из
Домашние роботы – PR2 (Willow Garage)
PR2 умеет втыкать вилку в розетку
Учёные из

Слайд 8Домашние роботы – Care-O-Bot
Институт технологии машиностроения и автоматизации Фраунгофера (Fraunhofer IPA)
Версия 3
Домашние роботы – Care-O-Bot
Институт технологии машиностроения и автоматизации Фраунгофера (Fraunhofer IPA)
Версия 3
Слайд 9Домашние роботы
IRT (Япония)
Panasonic
ReadyBot (США)
Домашние роботы
IRT (Япония)
Panasonic
ReadyBot (США)

Слайд 10Военные роботы США
Планы DARPA по перевооружению армии:
К 2015 году одна треть транспортных
Военные роботы США
Планы DARPA по перевооружению армии:
К 2015 году одна треть транспортных

Слайд 11Беспилотные летательные аппараты (БПЛА)
32 страны мира производят около 250 типов беспилотных самолетов
Беспилотные летательные аппараты (БПЛА)
32 страны мира производят около 250 типов беспилотных самолетов

Слайд 12Наземные боевые роботы
Транспортный робот BigDog (Boston Dinamics)
Боевой робот MAARS
Робот-сапер PackBot 1700 единиц
Наземные боевые роботы
Транспортный робот BigDog (Boston Dinamics)
Боевой робот MAARS
Робот-сапер PackBot 1700 единиц

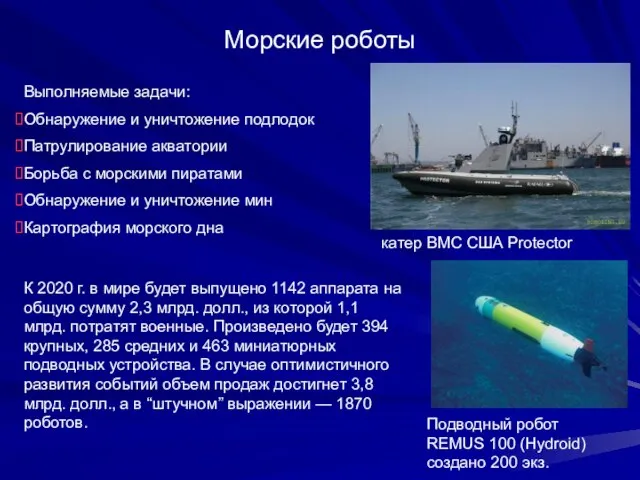
Слайд 13Морские роботы
Подводный робот REMUS 100 (Hydroid) создано 200 экз.
Выполняемые задачи:
Обнаружение и уничтожение
Морские роботы
Подводный робот REMUS 100 (Hydroid) создано 200 экз.
Выполняемые задачи:
Обнаружение и уничтожение
Слайд 14Военные роботы (Россия)
ТУ-300
МРК-27 - БТ
Дозор-600
БЛА-05 «Типчак»
Имеется много разработок БПЛА различных
Военные роботы (Россия)
ТУ-300
МРК-27 - БТ
Дозор-600
БЛА-05 «Типчак»
Имеется много разработок БПЛА различных

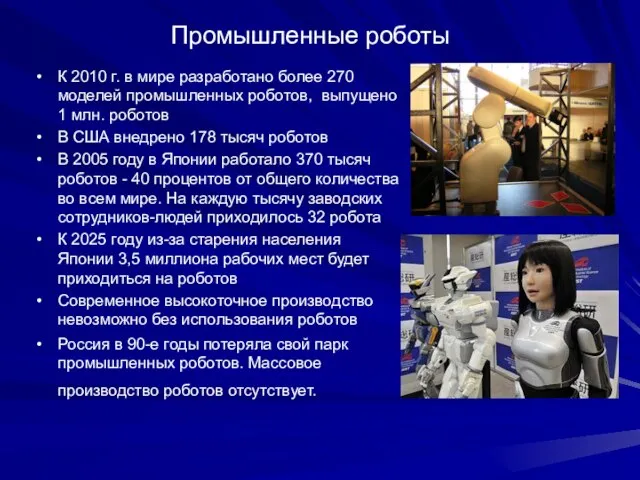
Слайд 15Промышленные роботы
К 2010 г. в мире разработано более 270 моделей промышленных роботов,
Промышленные роботы
К 2010 г. в мире разработано более 270 моделей промышленных роботов,
Слайд 16Космические роботы
Robonaut -2 отправится на МКС в сентябре 2010 г. (разработчик General
Космические роботы
Robonaut -2 отправится на МКС в сентябре 2010 г. (разработчик General

Слайд 17Роботы-охранники
Патрулирование улиц
Охрана помещений и зданий
Воздушное наблюдение (БПЛА)
SGR-1
(охрана корейской границы)
Робот-охранник Reborg-Q (Япония)
Роботы-охранники
Патрулирование улиц
Охрана помещений и зданий
Воздушное наблюдение (БПЛА)
SGR-1
(охрана корейской границы)
Робот-охранник Reborg-Q (Япония)

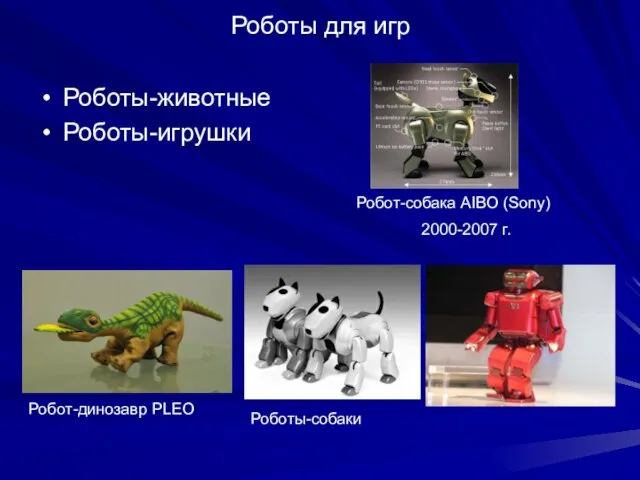
Слайд 18Роботы для игр
Роботы-животные
Роботы-игрушки
Робот-собака AIBO (Sony)
2000-2007 г.
Робот-динозавр PLEO
Роботы-собаки
Роботы для игр
Роботы-животные
Роботы-игрушки
Робот-собака AIBO (Sony)
2000-2007 г.
Робот-динозавр PLEO
Роботы-собаки
Слайд 19Роботы для медицины
Обслуживание больниц
Наблюдение за больными
Развозчик лекарств MRK-03 (Япония)
Роботы для медицины
Обслуживание больниц
Наблюдение за больными
Развозчик лекарств MRK-03 (Япония)

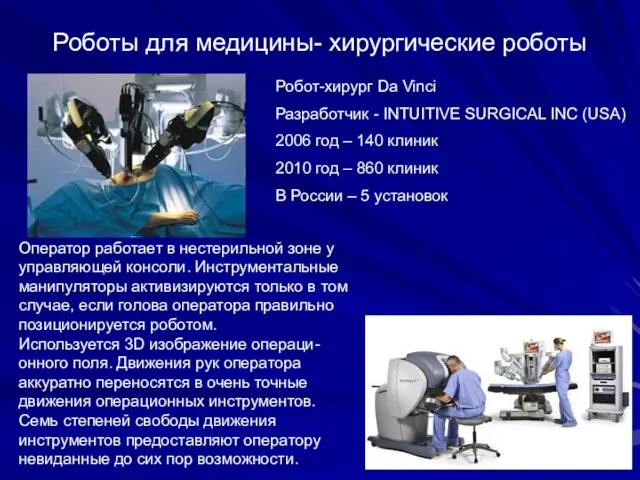
Слайд 20Роботы для медицины- xирургические роботы
Робот-хирург Da Vinci
Разработчик - INTUITIVE SURGICAL INC
Роботы для медицины- xирургические роботы
Робот-хирург Da Vinci
Разработчик - INTUITIVE SURGICAL INC
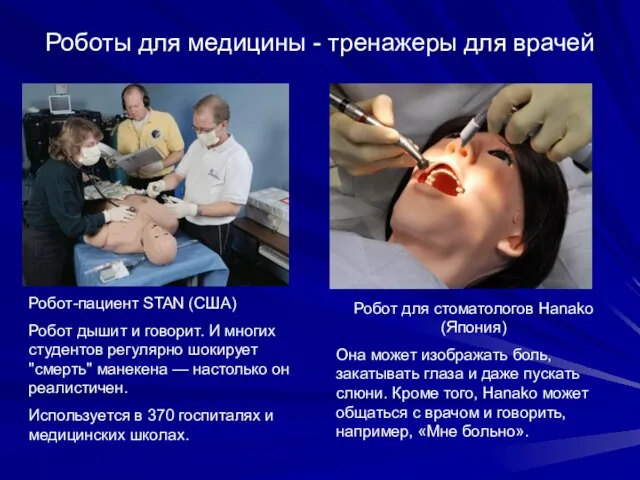
Слайд 21Роботы для медицины - тренажеры для врачей
Робот-пациент STAN (США)
Робот дышит и говорит.
Роботы для медицины - тренажеры для врачей
Робот-пациент STAN (США)
Робот дышит и говорит.
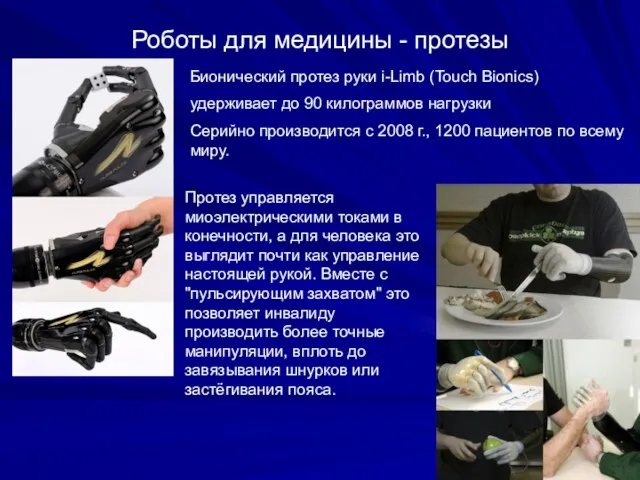
Слайд 22Роботы для медицины - протезы
Бионический протез руки i-Limb (Touch Bionics)
удерживает до 90
Роботы для медицины - протезы
Бионический протез руки i-Limb (Touch Bionics)
удерживает до 90
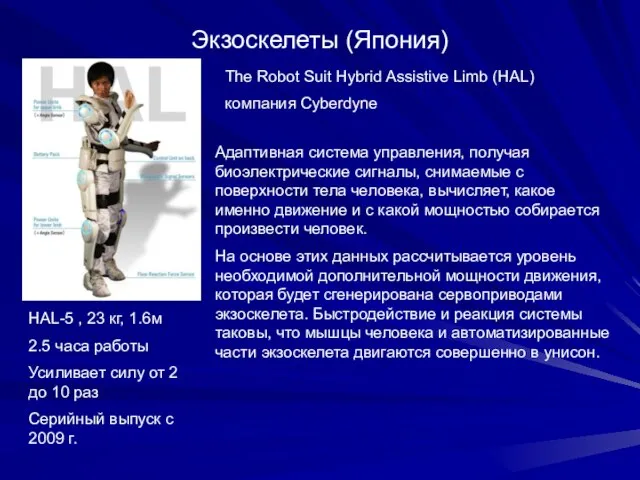
Слайд 23Экзоскелеты (Япония)
HAL-5 , 23 кг, 1.6м
2.5 часа работы
Усиливает силу от 2
Экзоскелеты (Япония)
HAL-5 , 23 кг, 1.6м
2.5 часа работы
Усиливает силу от 2
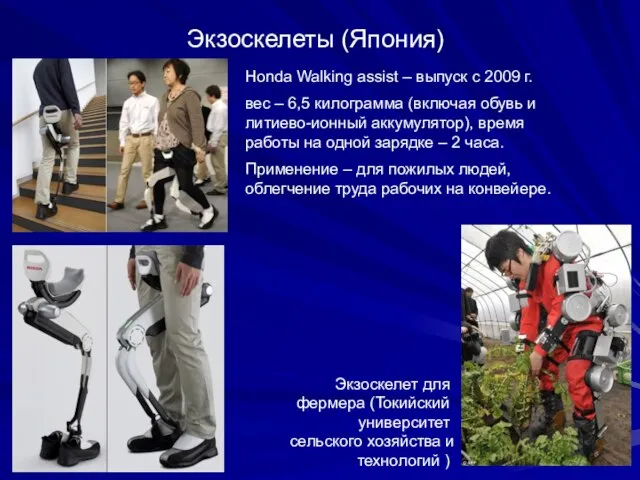
Слайд 24Экзоскелеты (Япония)
Honda Walking assist – выпуск с 2009 г.
вес – 6,5 килограмма
Экзоскелеты (Япония)
Honda Walking assist – выпуск с 2009 г.
вес – 6,5 килограмма
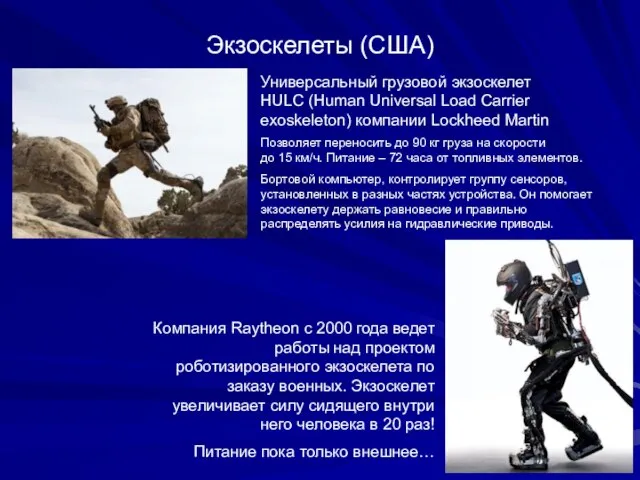
Слайд 25Экзоскелеты (США)
Универсальный грузовой экзоскелет HULC (Human Universal Load Carrier exoskeleton) компании Lockheed Martin
Позволяет
Экзоскелеты (США)
Универсальный грузовой экзоскелет HULC (Human Universal Load Carrier exoskeleton) компании Lockheed Martin
Позволяет
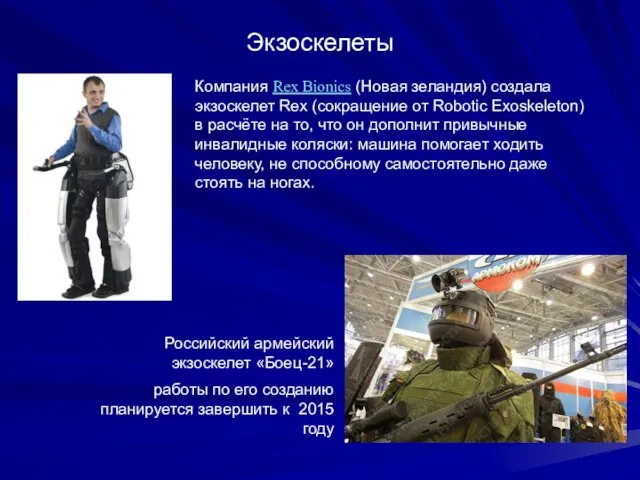
Слайд 26Экзоскелеты
Компания Rex Bionics (Новая зеландия) создала экзоскелет Rex (сокращение от Robotic Exoskeleton) в расчёте
Экзоскелеты
Компания Rex Bionics (Новая зеландия) создала экзоскелет Rex (сокращение от Robotic Exoskeleton) в расчёте
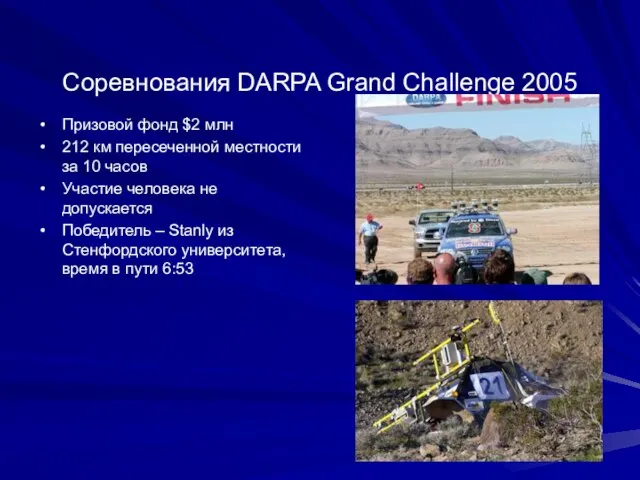
Слайд 27Соревнования DARPA Grand Challenge 2005
Призовой фонд $2 млн
212 км пересеченной местности за
Соревнования DARPA Grand Challenge 2005
Призовой фонд $2 млн
212 км пересеченной местности за
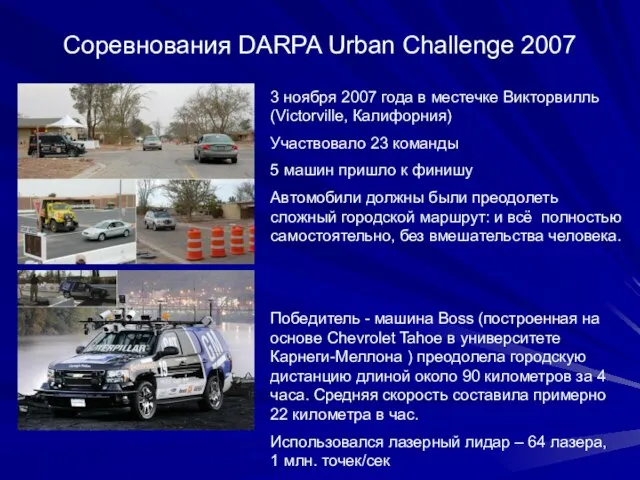
Слайд 28Соревнования DARPA Urban Challenge 2007
3 ноября 2007 года в местечке Викторвилль (Victorville,
Соревнования DARPA Urban Challenge 2007
3 ноября 2007 года в местечке Викторвилль (Victorville,
Слайд 29Соревнования MAGIC 2010
Роботы должны исследовать окружающую среду, строить подробные карты местности, планировать
Соревнования MAGIC 2010
Роботы должны исследовать окружающую среду, строить подробные карты местности, планировать

Слайд 30Первые Международные Олимпийские Игры человекоподобных роботов
Первые Международные Олимпийские Игры человекоподобных роботов
Первые Международные Олимпийские Игры человекоподобных роботов
Первые Международные Олимпийские Игры человекоподобных роботов
Слайд 31Футбол роботов
Международная Федерация FIRA
Ассоциация RoboCup : "Через 50 лет, в 2050
Футбол роботов
Международная Федерация FIRA
Ассоциация RoboCup : "Через 50 лет, в 2050

Слайд 32Соревнования «Мобильные роботы»
Институт механики в МГУ им. М.В.Ломоносова, МГУПИ
Соревнования с маяками, движение
Соревнования «Мобильные роботы»
Институт механики в МГУ им. М.В.Ломоносова, МГУПИ
Соревнования с маяками, движение
Слайд 33Соревнования EUROBOT
Eurobot - крупнейшие ежегодные соревнования роботов в Европе ([EUROBOT]). Каждый год
Соревнования EUROBOT
Eurobot - крупнейшие ежегодные соревнования роботов в Европе ([EUROBOT]). Каждый год
![Соревнования EUROBOT Eurobot - крупнейшие ежегодные соревнования роботов в Европе ([EUROBOT]). Каждый](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/405647/slide-32.jpg)
Слайд 34Открытый робототехнический турнир на кубок Политехнического музея
Политехнический музей (г. Москва) с 2009
Открытый робототехнический турнир на кубок Политехнического музея
Политехнический музей (г. Москва) с 2009
Слайд 35Тенденции развития
В ближайшее десятилетие следует ожидать широкое распространение бытовых роботов.
К 2025
Тенденции развития
В ближайшее десятилетие следует ожидать широкое распространение бытовых роботов.
К 2025
 Соединение части вида и части разреза. Соединение половины вида и половины разреза
Соединение части вида и части разреза. Соединение половины вида и половины разреза Контроль производственного процесса
Контроль производственного процесса Электронная почта
Электронная почта J-m zu etw. Dat gratulieren
J-m zu etw. Dat gratulieren Известные гроссмейстеры мира
Известные гроссмейстеры мира Обобщение по теме: «Безударные гласные в корне слова».(в форме игры «Счастливый случай».)Урок для учащихся 2 класса по образовате
Обобщение по теме: «Безударные гласные в корне слова».(в форме игры «Счастливый случай».)Урок для учащихся 2 класса по образовате ИСПОЛЬЗОВАНИЕ СОЦИАЛЬНЫХ МЕДИА
ИСПОЛЬЗОВАНИЕ СОЦИАЛЬНЫХ МЕДИА ДОКЛАД «Социально-экономическое развитие Пензенской области и перспективные точки роста»(Аналитические материалы I этапа пр
ДОКЛАД «Социально-экономическое развитие Пензенской области и перспективные точки роста»(Аналитические материалы I этапа пр Презентация на тему Животные пустыни. Землеройка (4 класс)
Презентация на тему Животные пустыни. Землеройка (4 класс) Финансирование проектов по строительству
Финансирование проектов по строительству Факторы, влияющие на климат России
Факторы, влияющие на климат России Заключение браков российских граждан с иностранными гражданами за пределами РФ
Заключение браков российских граждан с иностранными гражданами за пределами РФ Организация социально значимой деятельности с детьми "группы риска"
Организация социально значимой деятельности с детьми "группы риска" Презентация на тему Колядки на Рождество
Презентация на тему Колядки на Рождество Изменение целей и задач образования
Изменение целей и задач образования Рисунок черепа карандашом
Рисунок черепа карандашом На каждое направление деятельности
На каждое направление деятельности Оптические иллюзии
Оптические иллюзии Київська Русь іграшка
Київська Русь іграшка СКЭНАР терапия, как метод дифференциальной диагностики неврологических заболеваний, со стойкими болевыми
СКЭНАР терапия, как метод дифференциальной диагностики неврологических заболеваний, со стойкими болевыми 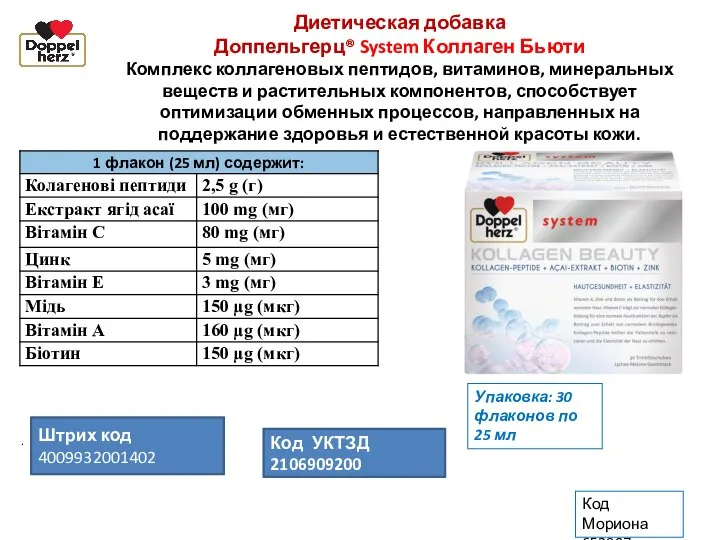 Диетическая добавка Доппельгерц® System Коллаген Бьюти
Диетическая добавка Доппельгерц® System Коллаген Бьюти Сам себе дизайнер
Сам себе дизайнер Innovations linguistiques des vers libres francophones modernes et caractéristiques oculomotrices de leur perception en lecture
Innovations linguistiques des vers libres francophones modernes et caractéristiques oculomotrices de leur perception en lecture Найдите «лишнее» слово:
Найдите «лишнее» слово: Человек и природа. От экологии природы к экологии души (3 класс)
Человек и природа. От экологии природы к экологии души (3 класс) Технология коллективного творческого воспитания И. П. Иванова
Технология коллективного творческого воспитания И. П. Иванова Хит Парад поросят
Хит Парад поросят Weihnachten in Deutschland
Weihnachten in Deutschland