- Использование технологий National Instruments в научных исследованиях

Содержание
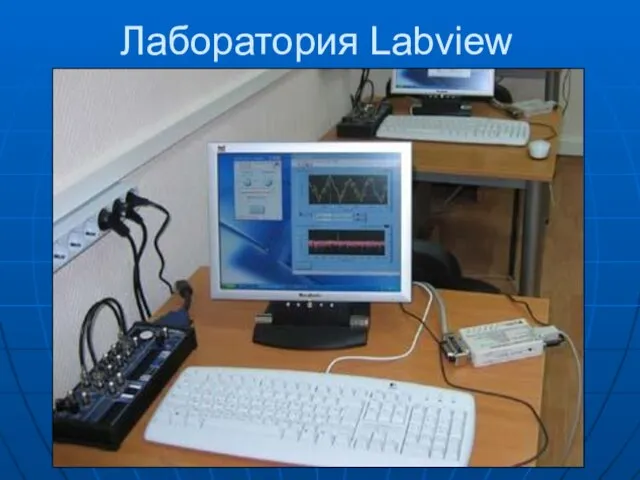
- 6. Лаборатория Labview
- 7. Спектральный и корреляционный анализ данных. Создание системы генератор-анализатор сигналов. Создание генератора: сигналы стандартной формы, шумовые сигналы
- 9. Контроль биологических параметров человека Создание системы контроля ряда биологических параметров человека. Цель задачи – одновременное измерение
- 12. Программирование цифровых сигнальных процессоров (DSP) Создание двухканального генератора сигналов (гармонических, прямоугольной, треугольной формы, шума различного типа)
- 14. Прецизионные весы с возможностью определения центра масс объекта и системой видеонаблюдения Цели задачи - создание прецизионных
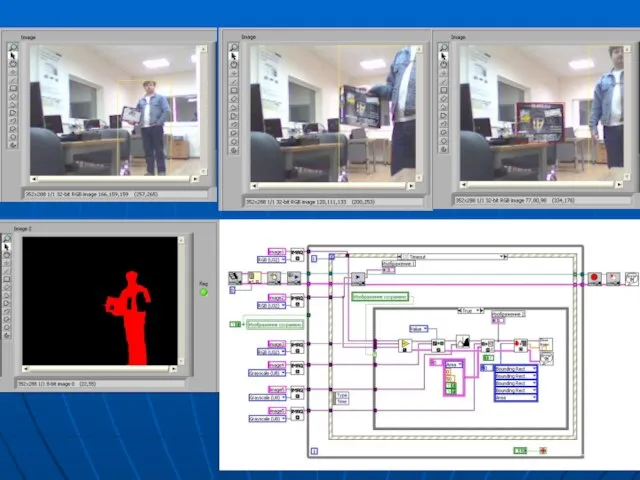
- 15. Оптический детектор движения Создание системы создание системы автоматического обнаружения и слежения за движущимися объектами, определение момента
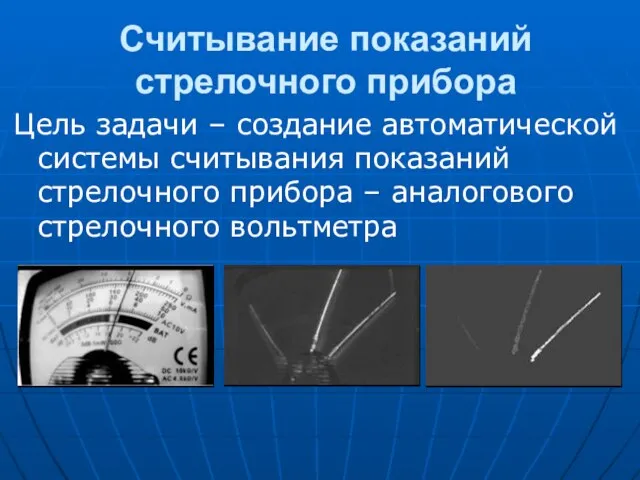
- 17. Считывание показаний стрелочного прибора Цель задачи – создание автоматической системы считывания показаний стрелочного прибора – аналогового
- 18. Управление шаговым двигателем и распознавание объектов Цель задачи – управление шаговым двигателем с двумя статорными обмотками
- 21. Скачать презентацию


Слайд 6Лаборатория Labview
Лаборатория Labview
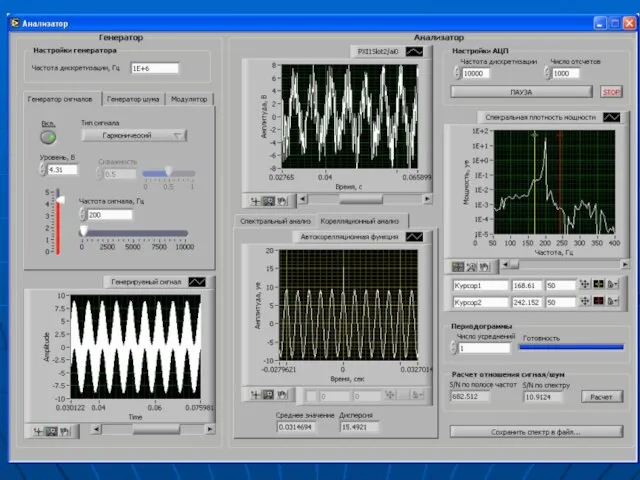
Слайд 7Спектральный и корреляционный анализ данных.
Создание системы генератор-анализатор сигналов.
Создание генератора: сигналы
Спектральный и корреляционный анализ данных.
Создание системы генератор-анализатор сигналов.
Создание генератора: сигналы
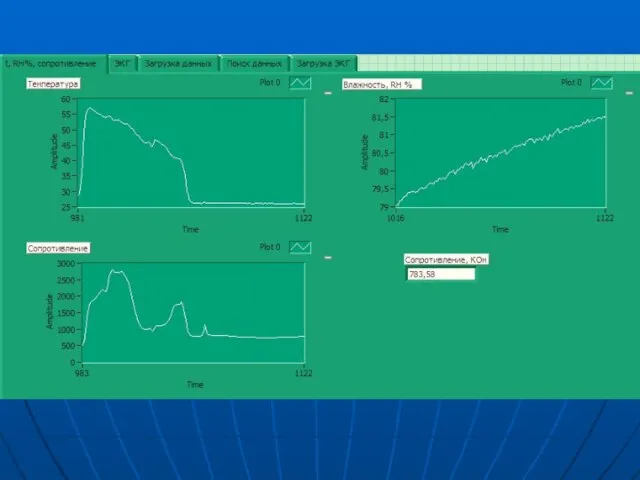
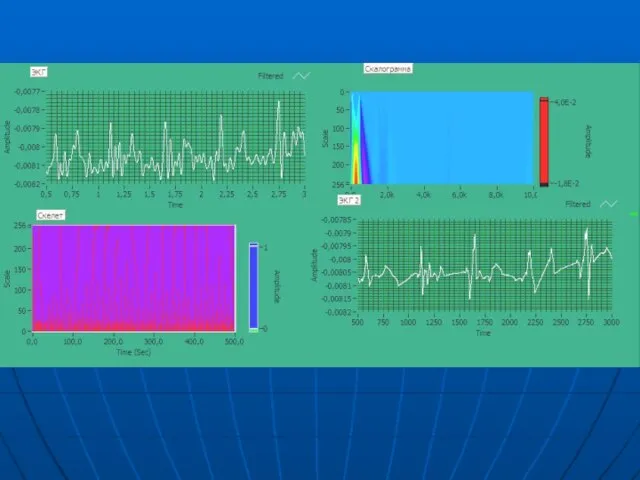
Слайд 9Контроль биологических параметров человека
Создание системы контроля ряда биологических параметров человека. Цель задачи –
Контроль биологических параметров человека
Создание системы контроля ряда биологических параметров человека. Цель задачи –
Слайд 12Программирование цифровых сигнальных процессоров (DSP)
Создание двухканального генератора сигналов (гармонических, прямоугольной, треугольной формы,
Программирование цифровых сигнальных процессоров (DSP)
Создание двухканального генератора сигналов (гармонических, прямоугольной, треугольной формы,
Слайд 14Прецизионные весы с возможностью определения центра масс объекта и системой видеонаблюдения
Цели задачи
Прецизионные весы с возможностью определения центра масс объекта и системой видеонаблюдения
Цели задачи
Слайд 15Оптический детектор движения
Создание системы создание системы автоматического обнаружения и слежения за движущимися
Оптический детектор движения
Создание системы создание системы автоматического обнаружения и слежения за движущимися
Слайд 17Считывание показаний стрелочного прибора
Цель задачи – создание автоматической системы считывания показаний стрелочного
Считывание показаний стрелочного прибора
Цель задачи – создание автоматической системы считывания показаний стрелочного
Слайд 18Управление шаговым двигателем и распознавание объектов
Цель задачи – управление шаговым двигателем с
Управление шаговым двигателем и распознавание объектов
Цель задачи – управление шаговым двигателем с

 Экосистема Байкала
Экосистема Байкала Фабрика пилотирования проектов национальной технологической инициативы и цифровой экономики
Фабрика пилотирования проектов национальной технологической инициативы и цифровой экономики Велосипедные походы и безопасность туристов
Велосипедные походы и безопасность туристов Моя кам'янка-дніпровська
Моя кам'янка-дніпровська ТП «Медицина будущего» как инструмент для ответа на современные технологические вызовы. Арктическая медицина. _______________________________
ТП «Медицина будущего» как инструмент для ответа на современные технологические вызовы. Арктическая медицина. _______________________________ Формирование целостной личности, творчески развитой индивидуальности средствами музыкального искусства.
Формирование целостной личности, творчески развитой индивидуальности средствами музыкального искусства. Модернизация технической базы (машинных дворов) и ремонтных мастерских сельскохозяйственных предприятий и других агропромышле
Модернизация технической базы (машинных дворов) и ремонтных мастерских сельскохозяйственных предприятий и других агропромышле Анероидно-мембранные приборы
Анероидно-мембранные приборы Сертификат защита-365. Защита портативной техники от случайных повреждений и кражи
Сертификат защита-365. Защита портативной техники от случайных повреждений и кражи Магическая сила слова
Магическая сила слова Графическое приложение к Требованиям № 3 редактируемый формат
Графическое приложение к Требованиям № 3 редактируемый формат Irregular verbs Practice
Irregular verbs Practice Управление персоналомTempus JEP - 27081 - 2006 «Поддержка и продвижение активного внедрения ИКТ в университетское управление в российских
Управление персоналомTempus JEP - 27081 - 2006 «Поддержка и продвижение активного внедрения ИКТ в университетское управление в российских  Принятие к учету по КФО 2
Принятие к учету по КФО 2 Модем и его функции
Модем и его функции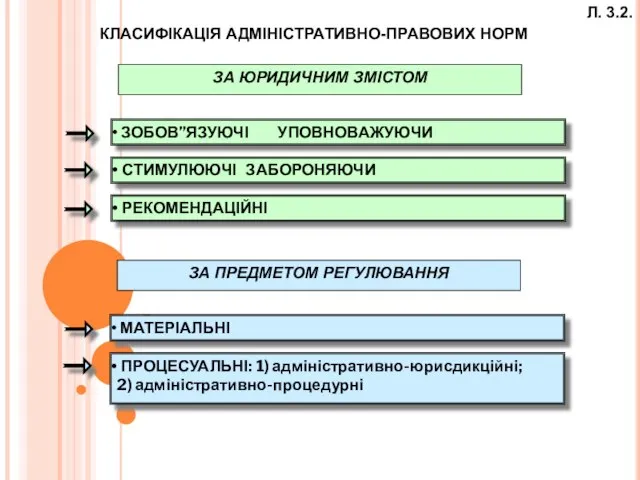 Класифікація адміністративно-правових норм за юридичним змістом
Класифікація адміністративно-правових норм за юридичним змістом Презентация на тему Статическая и динамическая механика легких
Презентация на тему Статическая и динамическая механика легких  Словообразование в китайском языке
Словообразование в китайском языке Основные документы, сопровождающие логистический процесс
Основные документы, сопровождающие логистический процесс одготовка будущих учителей к психолого-педагогическому сопровождению детей с особыми образовательными потребностями
одготовка будущих учителей к психолого-педагогическому сопровождению детей с особыми образовательными потребностями Отчет по дистанционному обучению
Отчет по дистанционному обучению Лакокрасочные покрытия в авторемонтном производстве
Лакокрасочные покрытия в авторемонтном производстве Проблемы и перспективы реализации принципов государственного управления в России
Проблемы и перспективы реализации принципов государственного управления в России ЗАО «РЕАТРЕК» Разработка технологии, организация производства и широкомасштабное внедрение структурно и химически модифиц
ЗАО «РЕАТРЕК» Разработка технологии, организация производства и широкомасштабное внедрение структурно и химически модифиц Love the bike
Love the bike Богучарская СОШ №1Региональное МО учителейИЗО, МХК, черчения и музыки
Богучарская СОШ №1Региональное МО учителейИЗО, МХК, черчения и музыки ИНСТИТУТ ТЕОРЕТИЧЕСКОЙ И ПРИКЛАДНОЙ ХИМИИ Архангельск 2012
ИНСТИТУТ ТЕОРЕТИЧЕСКОЙ И ПРИКЛАДНОЙ ХИМИИ Архангельск 2012 Искусственные волокна
Искусственные волокна