- Kinematics

Содержание
- 2. Some definitions Reference systems (frame) Reference system (frame) that is coordinates system jointly with watch for
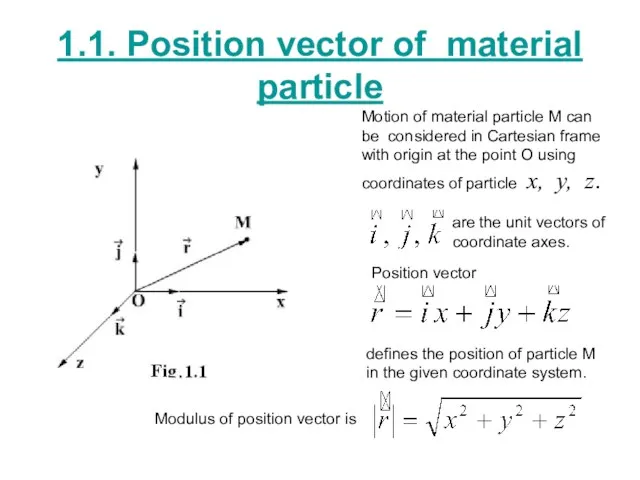
- 3. 1.1. Position vector of material particle Motion of material particle M can be considered in Cartesian
- 4. 1.2.Kinematic equations of particle motion The change of coordinates particle in time can be written by
- 5. 1.3. Trajectory of material article Trajectory is the line which presents the imaginary track of particle
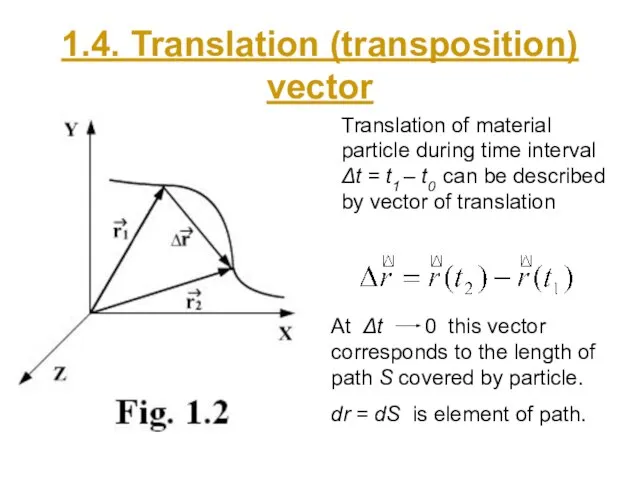
- 6. 1.4. Translation (transposition) vector Translation of material particle during time interval Δt = t1 – t0
- 7. 1.5. Velocity of motion M is position of particle at time instant t1 . N is
- 8. Addition of velocities The particle can take part in different motion simultaneously. At the resulting velocity
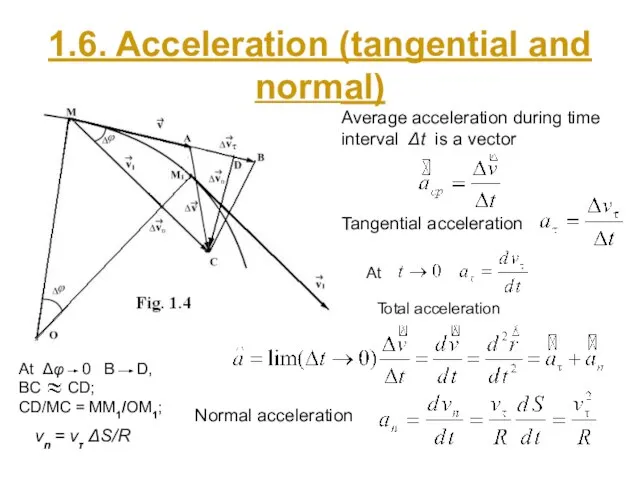
- 9. 1.6. Acceleration (tangential and normal) Average acceleration during time interval Δt is a vector Tangential acceleration
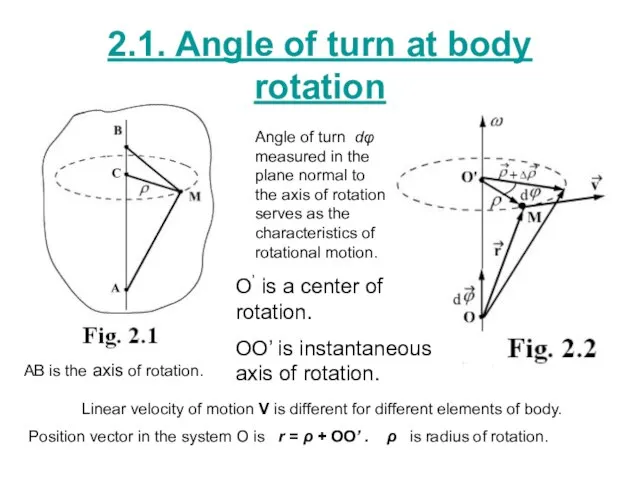
- 10. 2.1. Angle of turn at body rotation AB is the axis of rotation. Angle of turn
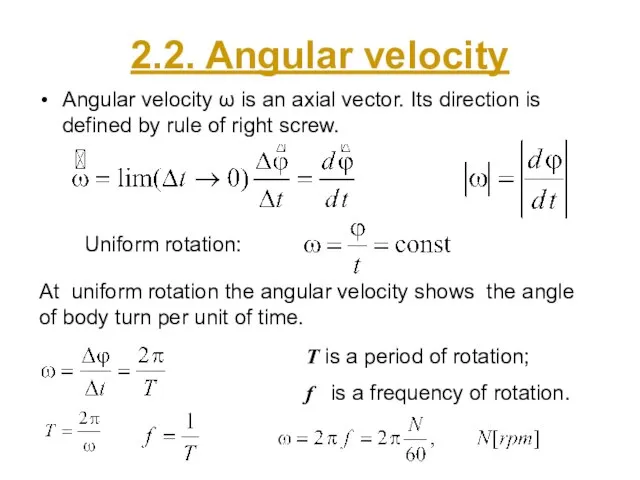
- 11. 2.2. Angular velocity Angular velocity ω is an axial vector. Its direction is defined by rule
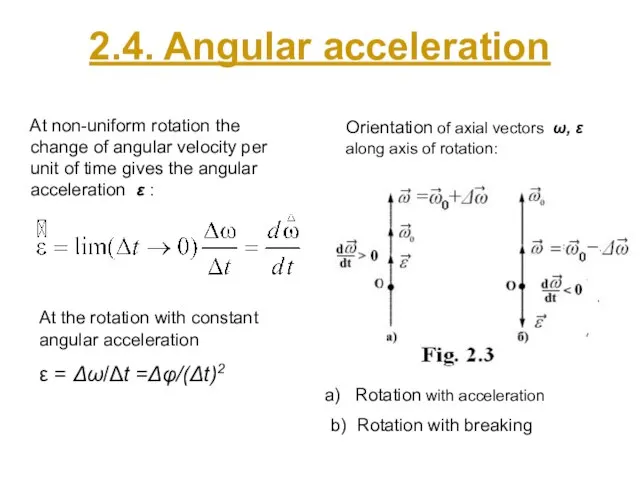
- 12. 2.4. Angular acceleration At non-uniform rotation the change of angular velocity per unit of time gives
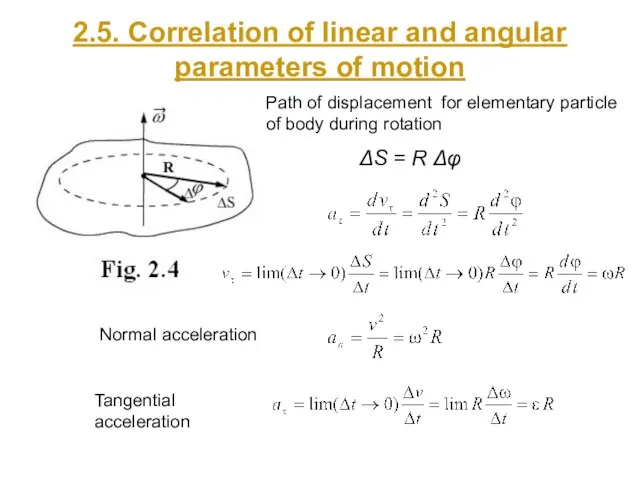
- 13. 2.5. Correlation of linear and angular parameters of motion Path of displacement for elementary particle of
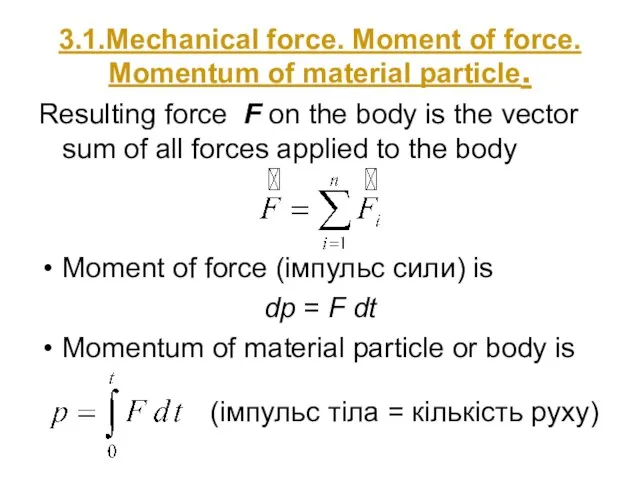
- 14. 3.1.Mechanical force. Moment of force. Momentum of material particle. Resulting force F on the body is
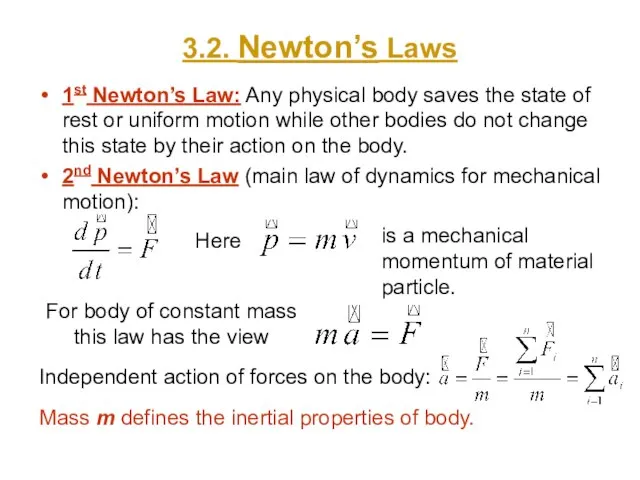
- 15. 3.2. Newton’s Laws 1st Newton’s Law: Any physical body saves the state of rest or uniform
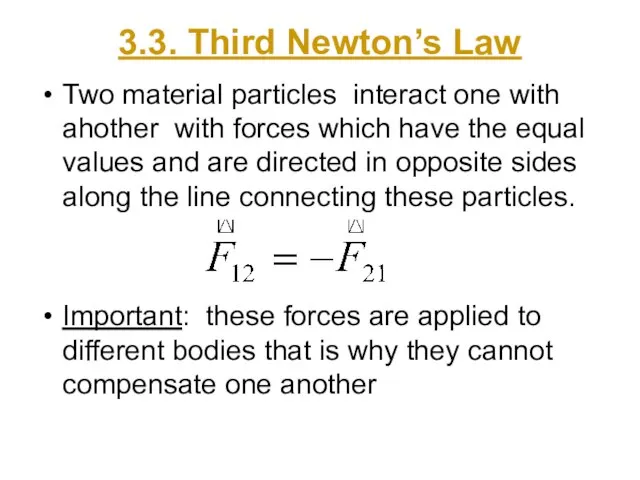
- 16. 3.3. Third Newton’s Law Two material particles interact one with ahother with forces which have the
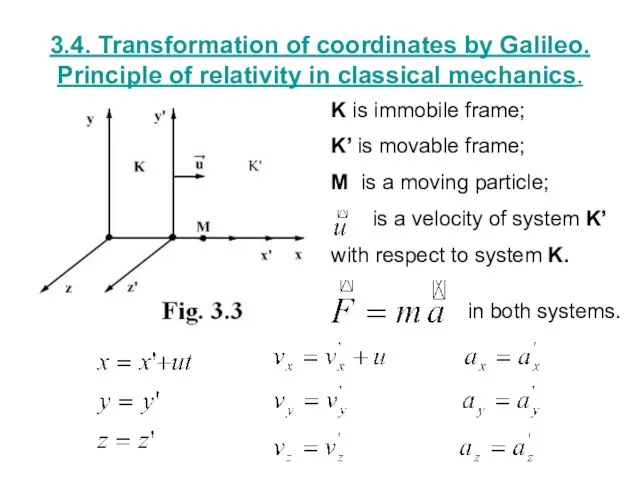
- 17. 3.4. Transformation of coordinates by Galileo. Principle of relativity in classical mechanics. K is immobile frame;
- 18. 3.5. Principle of relativity by Galileo Uniform motion of closed system with respect some inertial frame
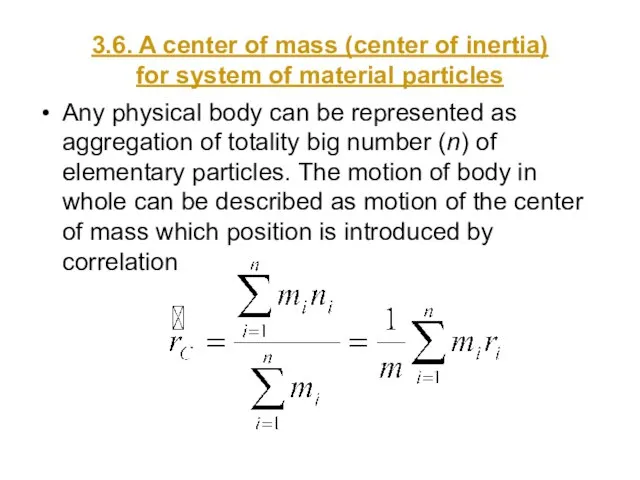
- 19. 3.6. A center of mass (center of inertia) for system of material particles Any physical body
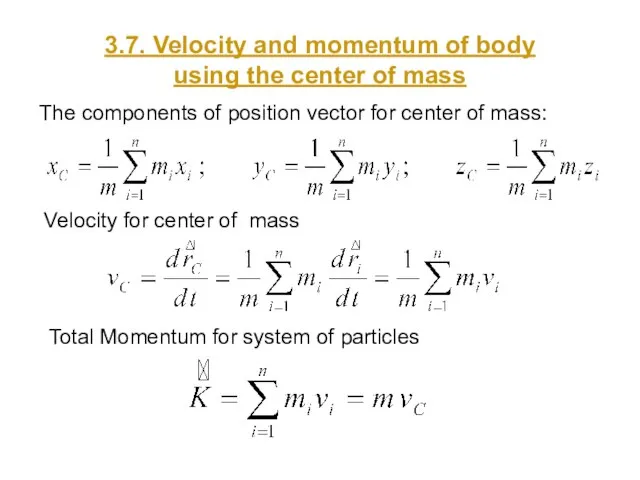
- 20. 3.7. Velocity and momentum of body using the center of mass The components of position vector
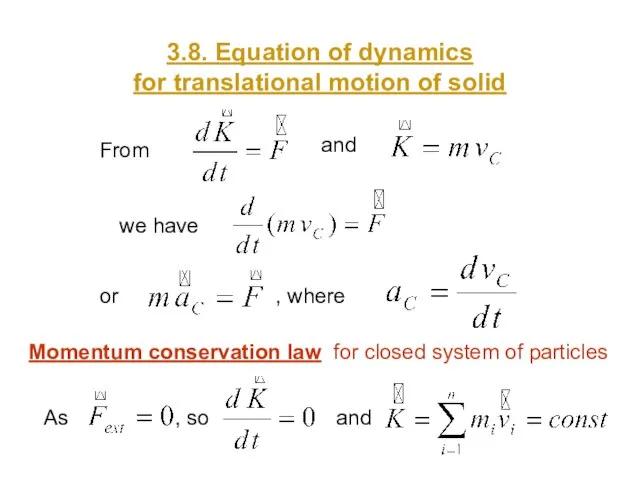
- 21. 3.8. Equation of dynamics for translational motion of solid From and we have or , where
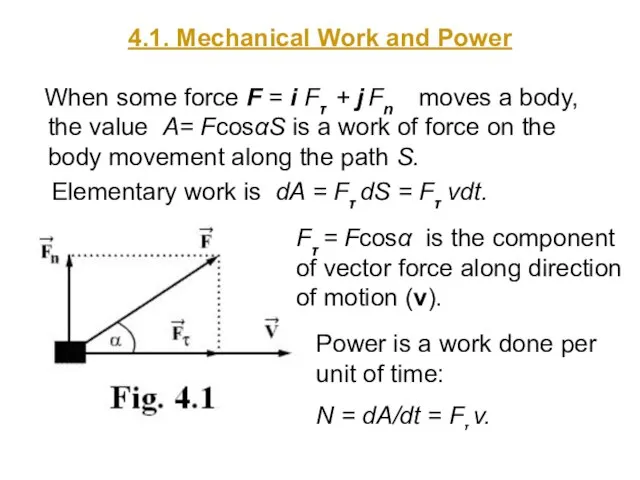
- 22. 4.1. Mechanical Work and Power When some force F = i Fτ + j Fn moves
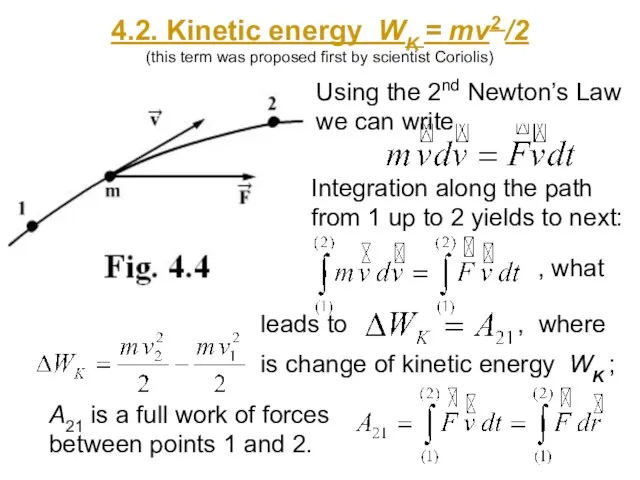
- 23. 4.2. Kinetic energy WK = mv2 /2 (this term was proposed first by scientist Coriolis) Using
- 24. 4.3. Potential field and forces in this field The force field is potential field if the
- 25. 4.4. Energy conservation law During motion of body in the potential field ΔΑ = ΔWK and
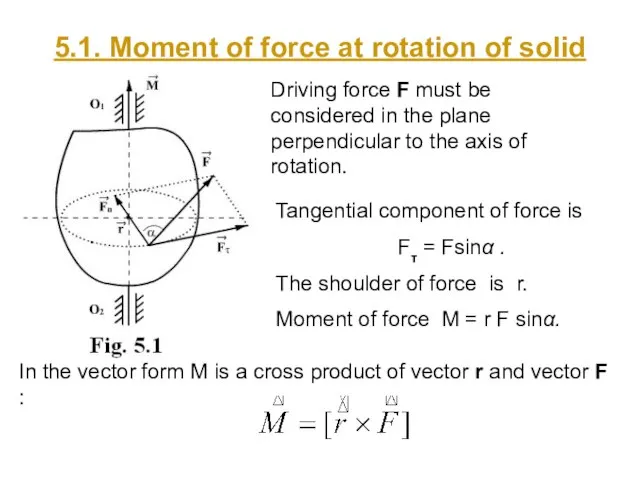
- 26. 5.1. Moment of force at rotation of solid Driving force F must be considered in the
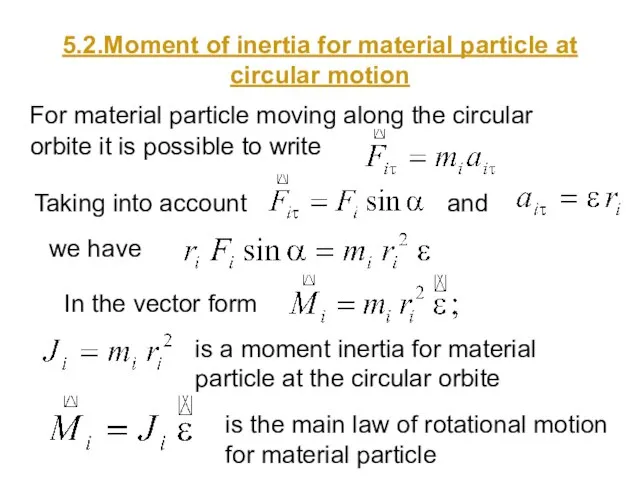
- 27. 5.2.Moment of inertia for material particle at circular motion For material particle moving along the circular
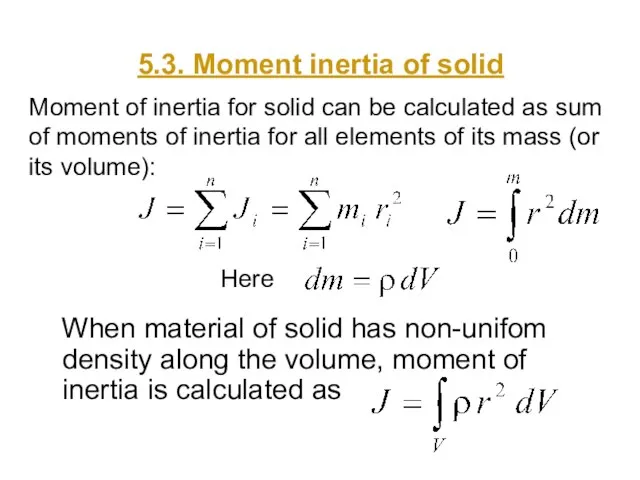
- 28. 5.3. Moment inertia of solid When material of solid has non-unifom density along the volume, moment
- 30. Скачать презентацию
Слайд 2Some definitions
Reference systems (frame)
Reference system (frame) that is coordinates system jointly with
Some definitions
Reference systems (frame) Reference system (frame) that is coordinates system jointly with
Слайд 31.1. Position vector of material particle
Motion of material particle M can be
1.1. Position vector of material particle
Motion of material particle M can be
Слайд 41.2.Kinematic equations of particle motion
The change of coordinates particle in time can
1.2.Kinematic equations of particle motion
The change of coordinates particle in time can
Слайд 51.3. Trajectory of material article
Trajectory is the line which presents the
1.3. Trajectory of material article
Trajectory is the line which presents the
Слайд 61.4. Translation (transposition) vector
Translation of material particle during time interval Δt =
1.4. Translation (transposition) vector
Translation of material particle during time interval Δt =
Слайд 71.5. Velocity of motion
M is position of particle at time instant t1
1.5. Velocity of motion
M is position of particle at time instant t1
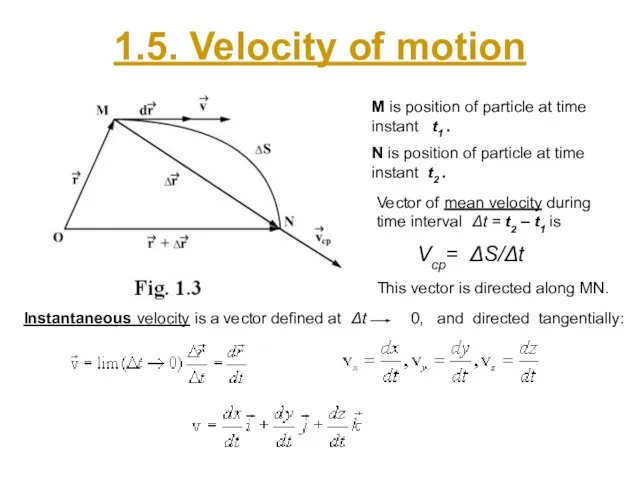
Слайд 8Addition of velocities
The particle can take part in different motion simultaneously.
At
the
Addition of velocities
The particle can take part in different motion simultaneously.
At
the
Слайд 91.6. Acceleration (tangential and normal)
Average acceleration during time interval Δt is a
1.6. Acceleration (tangential and normal)
Average acceleration during time interval Δt is a
Слайд 102.1. Angle of turn at body rotation
AB is the axis of rotation.
Angle
2.1. Angle of turn at body rotation
AB is the axis of rotation.
Angle
Слайд 112.2. Angular velocity
Angular velocity ω is an axial vector. Its direction is
2.2. Angular velocity
Angular velocity ω is an axial vector. Its direction is
Слайд 122.4. Angular acceleration
At non-uniform rotation the change of angular velocity per
2.4. Angular acceleration
At non-uniform rotation the change of angular velocity per
Слайд 132.5. Correlation of linear and angular parameters of motion
Path of displacement for
2.5. Correlation of linear and angular parameters of motion
Path of displacement for
Слайд 143.1.Mechanical force. Moment of force. Momentum of material particle.
Resulting force F
3.1.Mechanical force. Moment of force. Momentum of material particle.
Resulting force F
Слайд 153.2. Newton’s Laws
1st Newton’s Law: Any physical body saves the state of
3.2. Newton’s Laws
1st Newton’s Law: Any physical body saves the state of
Слайд 163.3. Third Newton’s Law
Two material particles interact one with ahother with forces
3.3. Third Newton’s Law
Two material particles interact one with ahother with forces
Слайд 173.4. Transformation of coordinates by Galileo.
Principle of relativity in classical mechanics.
K
3.4. Transformation of coordinates by Galileo.
Principle of relativity in classical mechanics.
K
Слайд 183.5. Principle of relativity by Galileo
Uniform motion of closed system with respect
3.5. Principle of relativity by Galileo
Uniform motion of closed system with respect
Слайд 193.6. A center of mass (center of inertia) for system of material
3.6. A center of mass (center of inertia) for system of material
Слайд 203.7. Velocity and momentum of body
using the center of mass
The
3.7. Velocity and momentum of body
using the center of mass
The
Слайд 213.8. Equation of dynamics for translational motion of solid
From
and
we have
or
, where
Momentum conservation
3.8. Equation of dynamics for translational motion of solid
From
and
we have
or
, where
Momentum conservation
Слайд 224.1. Mechanical Work and Power
When some force F = i Fτ
4.1. Mechanical Work and Power
When some force F = i Fτ
Слайд 234.2. Kinetic energy WK = mv2 /2
(this term was proposed first by
4.2. Kinetic energy WK = mv2 /2 (this term was proposed first by
Слайд 244.3. Potential field and forces in this field
The force field is
4.3. Potential field and forces in this field
The force field is
Слайд 254.4. Energy conservation law
During motion of body in the potential field
4.4. Energy conservation law
During motion of body in the potential field
Слайд 265.1. Moment of force at rotation of solid
Driving force F must be
5.1. Moment of force at rotation of solid
Driving force F must be
Слайд 275.2.Moment of inertia for material particle at circular motion
For material particle
5.2.Moment of inertia for material particle at circular motion
For material particle
Слайд 285.3. Moment inertia of solid
When material of solid has non-unifom density
5.3. Moment inertia of solid
When material of solid has non-unifom density
 Россия в условиях Первой мировой войны и общенационального кризиса
Россия в условиях Первой мировой войны и общенационального кризиса Лыжная прогулка
Лыжная прогулка Серия мебели «Берлин» цвет: венге Серия мебели «Берлин» цвет: венге + береза.
Серия мебели «Берлин» цвет: венге Серия мебели «Берлин» цвет: венге + береза. Тайм - менеджмент
Тайм - менеджмент Загадки Куликовской битвы
Загадки Куликовской битвы да
да Районная игра «Орленок- школа безопасности - 2007» Конкурс «Равнение на героев»
Районная игра «Орленок- школа безопасности - 2007» Конкурс «Равнение на героев» Пакет «Имплантация зубов»
Пакет «Имплантация зубов» Трудовые ресурсы таможенных органов
Трудовые ресурсы таможенных органов Как изготовить вытынанки
Как изготовить вытынанки Опис та використання функцій
Опис та використання функцій домашняя утварь
домашняя утварь Повторение
Повторение От зубрешки – к семи не
От зубрешки – к семи не Психология научного творчества
Психология научного творчества Бороться и искать, Найти и не сдаваться.
Бороться и искать, Найти и не сдаваться. Теория ДіП_Л.1. 2
Теория ДіП_Л.1. 2 «Пути формирования у школьников способности к профессиональному и личностному самоопределению»
«Пути формирования у школьников способности к профессиональному и личностному самоопределению» Нетрадиционные формы рисования для детей дошкольного возраста
Нетрадиционные формы рисования для детей дошкольного возраста Водоемы нашего края
Водоемы нашего края Сочетание устойчивого развития и сохранения исторической памяти
Сочетание устойчивого развития и сохранения исторической памяти 8696917
8696917 Лексика на деловых встречах
Лексика на деловых встречах Probability-2
Probability-2 Принцип работы Jenoptik Opticline
Принцип работы Jenoptik Opticline Промышленное оборудование и комплексная автоматизация
Промышленное оборудование и комплексная автоматизация Властелины суши
Властелины суши Образ Раскольникова
Образ Раскольникова