- Классификация прикладных программ

Содержание
- 2. Цель и задачи курса Дисциплина обеспечивает базовую подготовку инженеров в изучении теории и принципов работы прикладных
- 3. Классификация прикладных программ Программное обеспечение (ПО) – совокупность программ и данных, предназначенных для решения определенного круга
- 4. Классификация программного обеспечения Системное ПО – решает задачи общего управления и поддержания работоспособности системы в целом.
- 5. Понятие пакета прикладных программ ППП – это комплекс взаимосвязанных программ для решения определенного класса задач из
- 6. Обзор основных этапов развития Первое поколение. В качестве входных языков ППП первого поколения использовались универсальные языки
- 7. Перспективы развития прикладного программного обеспечения. К отличительным чертам ПО нового поколения следующие: интеграция компонентов прикладного пакета
- 8. Обзор программ математических вычислений, их возможности и особенности В области инженерного проектирования выделяют три основных раздела:
- 9. Краткий обзор возможностей MatLab MatLab – одна из старейших, тщательно проработанных и проверенных временем систем автоматизации
- 10. Лекция 2. Модель системы регулирования уровня БЕЛОВ НИКИТА ВАДИМОВИЧ, АССИСТЕНТ КАФЕДРЫ ИСУИА
- 11. Объект
- 12. Исполнительный механизм α=k2φ Пусть имеется переменная R, принимающая значения (–1), 0 и 1 согласно правилу: R
- 13. Система регулирования в целом Кроме объекта и исполнительного механизма система содержит датчик уровня, задающее устройство, элемент
- 14. Лекция 3. Модель следящей системы робота-манипулятора БЕЛОВ НИКИТА ВАДИМОВИЧ, АССИСТЕНТ КАФЕДРЫ ИСУИА
- 15. Схема компоновки робота-манипулятора
- 16. Структурная схема системы управления
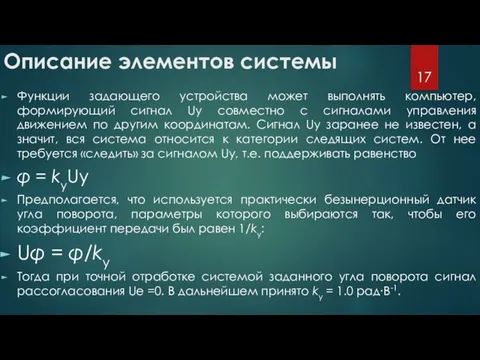
- 17. Описание элементов системы Функции задающего устройства может выполнять компьютер, формирующий сигнал Uу совместно с сигналами управления
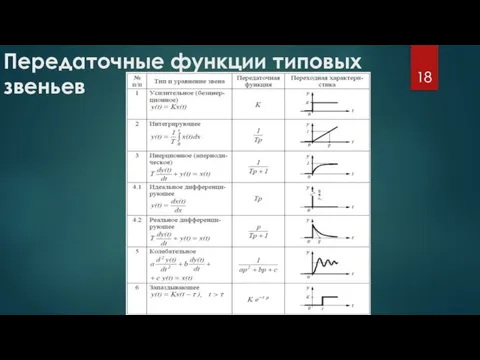
- 18. Передаточные функции типовых звеньев
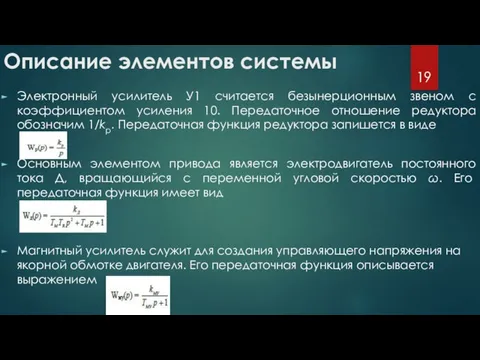
- 19. Описание элементов системы Электронный усилитель У1 считается безынерционным звеном с коэффициентом усиления 10. Передаточное отношение редуктора
- 21. Скачать презентацию
Слайд 3Классификация прикладных программ
Программное обеспечение (ПО) – совокупность программ и данных, предназначенных для
Классификация прикладных программ
Программное обеспечение (ПО) – совокупность программ и данных, предназначенных для
Слайд 4Классификация программного обеспечения
Системное ПО – решает задачи общего управления и поддержания работоспособности
Классификация программного обеспечения
Системное ПО – решает задачи общего управления и поддержания работоспособности
Слайд 5Понятие пакета прикладных программ
ППП – это комплекс взаимосвязанных программ для решения определенного
Понятие пакета прикладных программ
ППП – это комплекс взаимосвязанных программ для решения определенного
Слайд 6Обзор основных этапов развития
Первое поколение. В качестве входных языков ППП первого поколения
Обзор основных этапов развития
Первое поколение. В качестве входных языков ППП первого поколения
Слайд 7Перспективы развития прикладного программного обеспечения.
К отличительным чертам ПО нового поколения следующие:
интеграция компонентов
Перспективы развития прикладного программного обеспечения.
К отличительным чертам ПО нового поколения следующие:
интеграция компонентов
Слайд 8Обзор программ математических вычислений, их возможности и особенности
В области инженерного проектирования выделяют
Обзор программ математических вычислений, их возможности и особенности
В области инженерного проектирования выделяют
Слайд 9Краткий обзор возможностей MatLab
MatLab – одна из старейших, тщательно проработанных и проверенных
Краткий обзор возможностей MatLab
MatLab – одна из старейших, тщательно проработанных и проверенных
Слайд 10
Лекция 2. Модель системы регулирования уровня
БЕЛОВ НИКИТА ВАДИМОВИЧ,
АССИСТЕНТ КАФЕДРЫ ИСУИА
Лекция 2. Модель системы регулирования уровня
БЕЛОВ НИКИТА ВАДИМОВИЧ,
АССИСТЕНТ КАФЕДРЫ ИСУИА
Слайд 11Объект
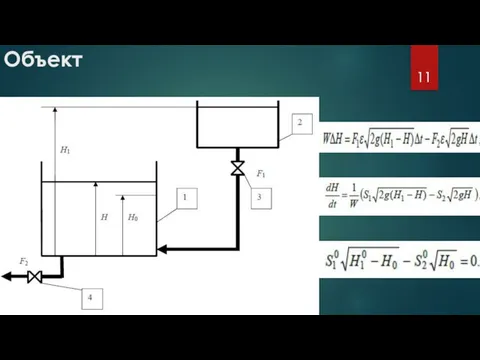
Объект
Слайд 12Исполнительный механизм
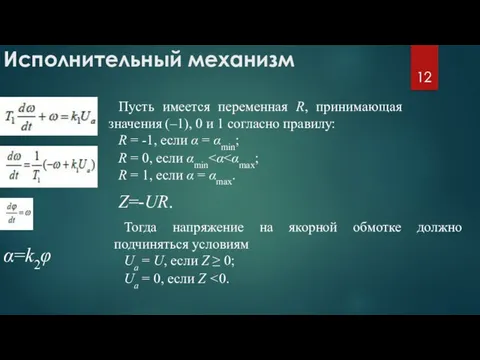
α=k2φ
Пусть имеется переменная R, принимающая значения (–1), 0 и 1 согласно
Исполнительный механизм
α=k2φ
Пусть имеется переменная R, принимающая значения (–1), 0 и 1 согласно
Слайд 13Система регулирования в целом
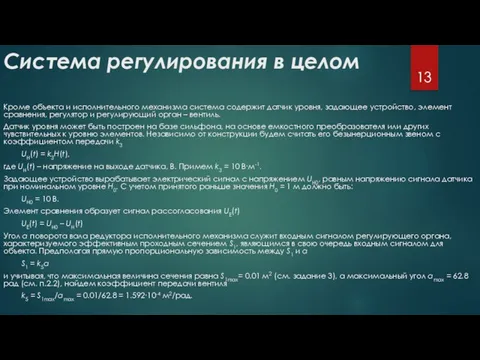
Кроме объекта и исполнительного механизма система содержит датчик уровня,
Система регулирования в целом
Кроме объекта и исполнительного механизма система содержит датчик уровня,
Слайд 14Лекция 3. Модель следящей системы робота-манипулятора
БЕЛОВ НИКИТА ВАДИМОВИЧ,
АССИСТЕНТ КАФЕДРЫ ИСУИА
Лекция 3. Модель следящей системы робота-манипулятора
БЕЛОВ НИКИТА ВАДИМОВИЧ,
АССИСТЕНТ КАФЕДРЫ ИСУИА
Слайд 15Схема компоновки робота-манипулятора
Схема компоновки робота-манипулятора

Слайд 16Структурная схема системы управления
Структурная схема системы управления

Слайд 17Описание элементов системы
Функции задающего устройства может выполнять компьютер, формирующий сигнал Uу совместно
Описание элементов системы
Функции задающего устройства может выполнять компьютер, формирующий сигнал Uу совместно
Слайд 18Передаточные функции типовых звеньев
Передаточные функции типовых звеньев
Слайд 19Описание элементов системы
Электронный усилитель У1 считается безынерционным звеном с коэффициентом усиления 10.
Описание элементов системы
Электронный усилитель У1 считается безынерционным звеном с коэффициентом усиления 10.
 Алгоритм исследования функции с помощью производной
Алгоритм исследования функции с помощью производной Музафер Шериф
Музафер Шериф Труд- основа жизни 6 класс
Труд- основа жизни 6 класс Исследовательский проект:«Измерение длины предметов»
Исследовательский проект:«Измерение длины предметов» Применение теории игр в политике и экономике
Применение теории игр в политике и экономике Саласпилс
Саласпилс Действия Федеральной антимонопольной службы
Действия Федеральной антимонопольной службы Презентация на тему Март – первый весенний месяц
Презентация на тему Март – первый весенний месяц  структура
структура Общеобразовательная организация, учебный центр Наука-Сервис
Общеобразовательная организация, учебный центр Наука-Сервис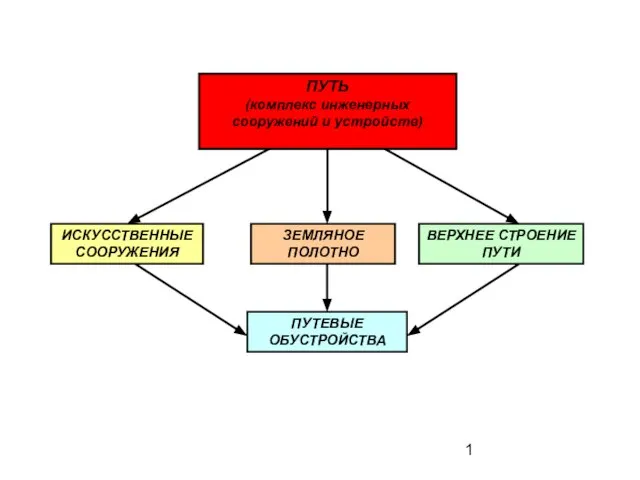 ЗЕМЛЯНОЕ ПОЛОТНО
ЗЕМЛЯНОЕ ПОЛОТНО ЭТИКЕТ за праздничным столом
ЭТИКЕТ за праздничным столом Правовой фундамент государства. 12 декабря – День Конституции
Правовой фундамент государства. 12 декабря – День Конституции Конвенция ООН о правах ребёнка
Конвенция ООН о правах ребёнка Моя Мадонна
Моя Мадонна Урок математики с Машей и Мишей
Урок математики с Машей и Мишей Петербург-герой романов Достоевского
Петербург-герой романов Достоевского Презентация на тему "Жизнь и творчество" 11 класс
Презентация на тему "Жизнь и творчество" 11 класс "Петербургские повести" Н.В. Гоголя
"Петербургские повести" Н.В. Гоголя 7 мифов о Чернобыле
7 мифов о Чернобыле Управленческий учёт и учёт персонала
Управленческий учёт и учёт персонала Природные зоны Зона степей
Природные зоны Зона степей Шоколад
Шоколад Технология повышения урожая овощей
Технология повышения урожая овощей Планета - Сатурн
Планета - Сатурн Специальное предложение по контейнерным закупкам
Специальное предложение по контейнерным закупкам Игра, как метод подачи информации
Игра, как метод подачи информации BUSINESS PROCESS
BUSINESS PROCESS