- Курсовой проект по предмету«Информатика»Математическая модель руки фехтовальщика

Содержание
- 2. Цель работы Создать математическую модель, которая по заданным параметрам (углам в суставах, координатам плеча) восстанавливает положение
- 3. Степени свободы Наша модель руки имеет 9 степеней свободы: 2 — поступательное движение плеча (вперед/назад; вверх/вниз)
- 4. Поворот руки После этого необходимо также повернуть остальные (отстоящие еще дальше от плеча чем рассматриваемый) векторы
- 5. Реализация вращения Для визуализации вместо того чтобы поворачивать руку на небольшие углы а потом из нового
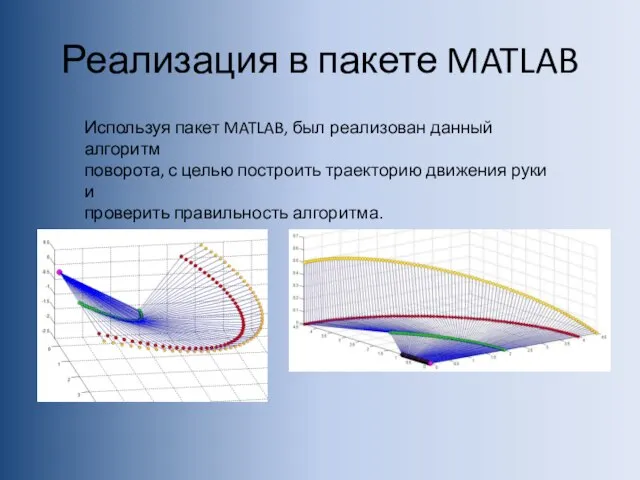
- 6. Реализация в пакете MATLAB Используя пакет MATLAB, был реализован данный алгоритм поворота, с целью построить траекторию
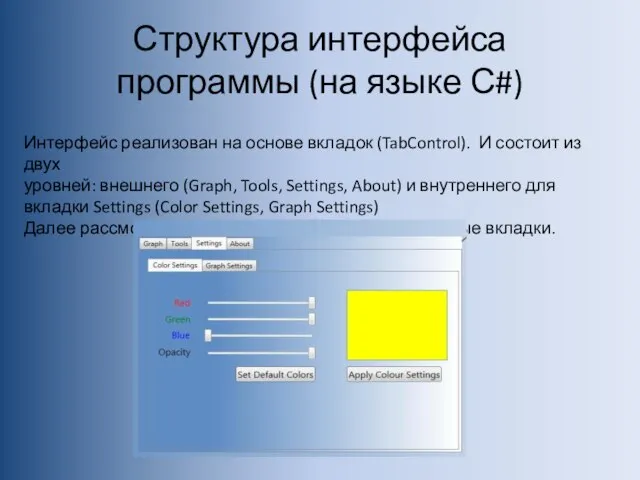
- 7. Структура интерфейса программы (на языке С#) Интерфейс реализован на основе вкладок (TabControl). И состоит из двух
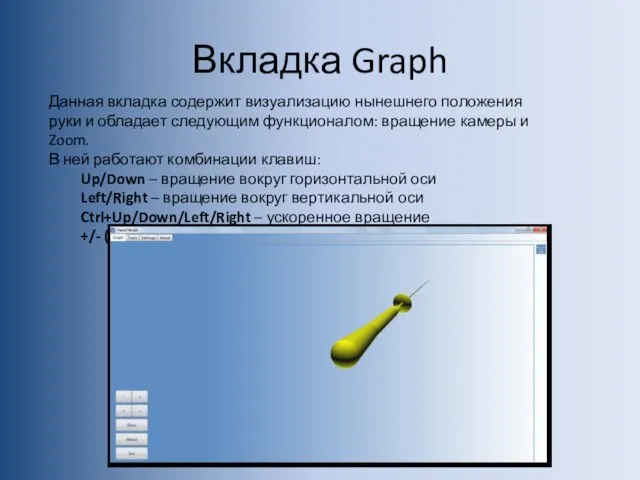
- 8. Вкладка Graph Данная вкладка содержит визуализацию нынешнего положения руки и обладает следующим функционалом: вращение камеры и
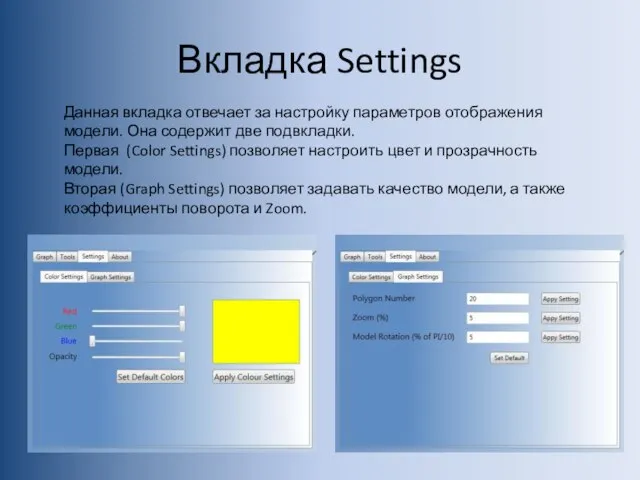
- 9. Вкладка Settings Данная вкладка отвечает за настройку параметров отображения модели. Она содержит две подвкладки. Первая (Color
- 10. Программная реализация 3D-графики Интерфейс программы реализован при помощи библиотеки WPF (Windows Presentation Foundation) и встроенного в
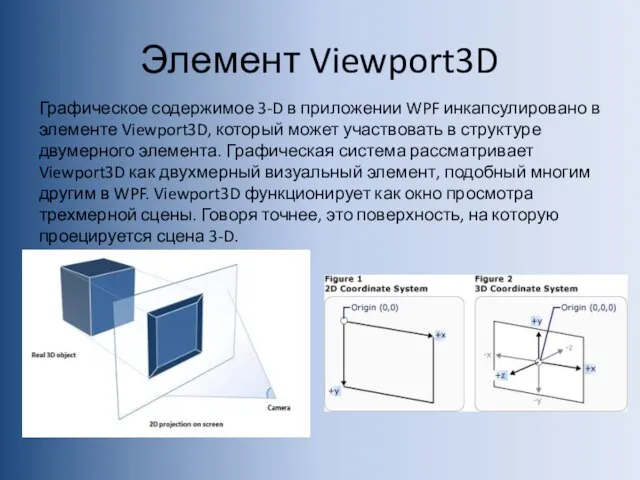
- 11. Элемент Viewport3D Графическое содержимое 3-D в приложении WPF инкапсулировано в элементе Viewport3D, который может участвовать в
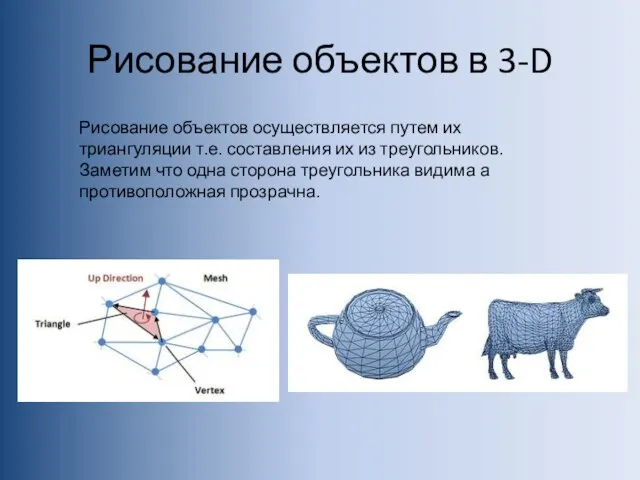
- 12. Рисование объектов в 3-D Рисование объектов осуществляется путем их триангуляции т.е. составления их из треугольников. Заметим
- 14. Скачать презентацию
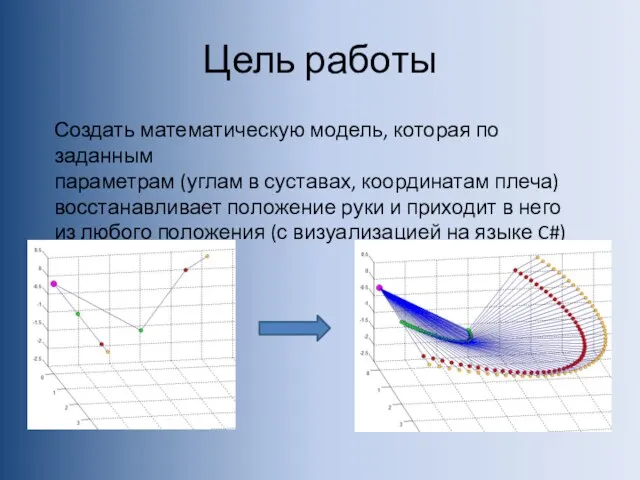
Слайд 2Цель работы
Создать математическую модель, которая по заданным
параметрам (углам в суставах, координатам
Цель работы
Создать математическую модель, которая по заданным
параметрам (углам в суставах, координатам
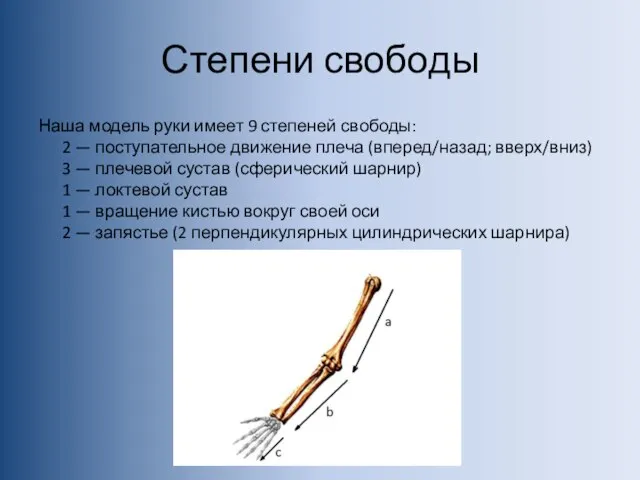
Слайд 3Степени свободы
Наша модель руки имеет 9 степеней свободы:
2 — поступательное движение плеча
Степени свободы
Наша модель руки имеет 9 степеней свободы: 2 — поступательное движение плеча
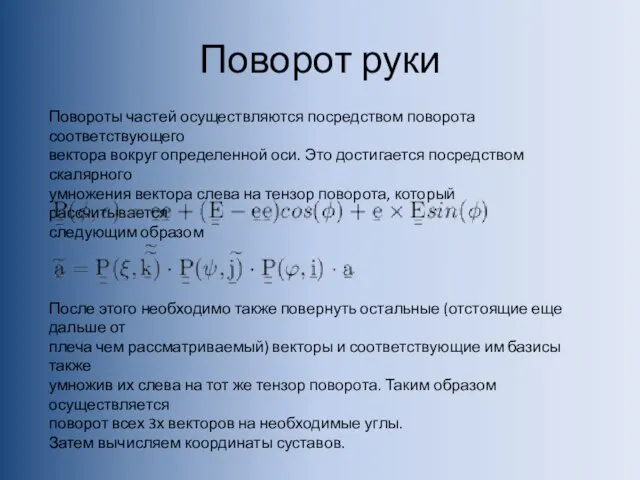
Слайд 4Поворот руки
После этого необходимо также повернуть остальные (отстоящие еще дальше от
плеча
Поворот руки
После этого необходимо также повернуть остальные (отстоящие еще дальше от
плеча
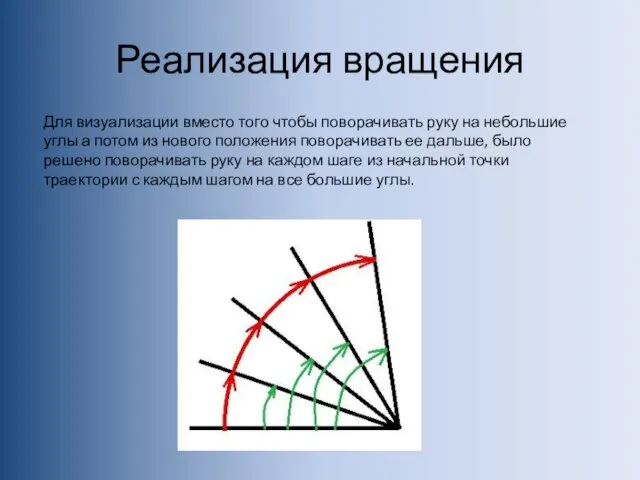
Слайд 5Реализация вращения
Для визуализации вместо того чтобы поворачивать руку на небольшие углы а
Реализация вращения
Для визуализации вместо того чтобы поворачивать руку на небольшие углы а
Слайд 6Реализация в пакете MATLAB
Используя пакет MATLAB, был реализован данный алгоритм
поворота, с
Реализация в пакете MATLAB
Используя пакет MATLAB, был реализован данный алгоритм
поворота, с
Слайд 7Структура интерфейса программы (на языке С#)
Интерфейс реализован на основе вкладок (TabControl). И
Структура интерфейса программы (на языке С#)
Интерфейс реализован на основе вкладок (TabControl). И
Слайд 8Вкладка Graph
Данная вкладка содержит визуализацию нынешнего положения руки и обладает следующим функционалом:
Вкладка Graph
Данная вкладка содержит визуализацию нынешнего положения руки и обладает следующим функционалом:
Слайд 9Вкладка Settings
Данная вкладка отвечает за настройку параметров отображения модели. Она содержит две
Вкладка Settings
Данная вкладка отвечает за настройку параметров отображения модели. Она содержит две
Слайд 10Программная реализация
3D-графики
Интерфейс программы реализован при помощи библиотеки WPF (Windows Presentation Foundation)
Программная реализация
3D-графики
Интерфейс программы реализован при помощи библиотеки WPF (Windows Presentation Foundation)
Слайд 11Элемент Viewport3D
Графическое содержимое 3-D в приложении WPF инкапсулировано в элементе Viewport3D, который
Элемент Viewport3D
Графическое содержимое 3-D в приложении WPF инкапсулировано в элементе Viewport3D, который
Слайд 12Рисование объектов в 3-D
Рисование объектов осуществляется путем их триангуляции т.е. составления их
Рисование объектов в 3-D
Рисование объектов осуществляется путем их триангуляции т.е. составления их
 Характеристика детей с ЗПР. Неблагоприятные семейные факторы влияющие на ребенка с ЗПР
Характеристика детей с ЗПР. Неблагоприятные семейные факторы влияющие на ребенка с ЗПР road monitoring 2020
road monitoring 2020 Круги на полях
Круги на полях Основные различия между руководителем по теории «Х» и по теории «Y»
Основные различия между руководителем по теории «Х» и по теории «Y» Средства и методы решения анимационных задачв сети INTERNET
Средства и методы решения анимационных задачв сети INTERNET Презентация на тему ЛАТВИЯ
Презентация на тему ЛАТВИЯ Развитие общества
Развитие общества 18.02.2008 г.
18.02.2008 г. Луг и его обитатели
Луг и его обитатели Стратегия по всем каналам: индивидуальный подход к каждому партнеру
Стратегия по всем каналам: индивидуальный подход к каждому партнеру Пути реализации инклюзивного образования средствами инновационной деятельности
Пути реализации инклюзивного образования средствами инновационной деятельности Документационное обеспечение управления и фукционирование организации
Документационное обеспечение управления и фукционирование организации Игрушки из полхов-майдана
Игрушки из полхов-майдана Ювенальная юстиция «за» и «против»
Ювенальная юстиция «за» и «против» С Днём матери
С Днём матери Графики линейных функций
Графики линейных функций Презентация на тему Влияние солнечной активности на процессы, происходящие на Земле
Презентация на тему Влияние солнечной активности на процессы, происходящие на Земле  ICN Holding
ICN Holding Феномен канона в искусстве Древнего Египта
Феномен канона в искусстве Древнего Египта Общество как сложная динамичная система
Общество как сложная динамичная система Социальные сети Презентацию разработала ученица 11 класса «А» Рязанова Анастасия.
Социальные сети Презентацию разработала ученица 11 класса «А» Рязанова Анастасия. New Jersey Employment Law Attorneys
New Jersey Employment Law Attorneys Willst du glücklich sein im Leben, trage bei zu andrer Glück, denn die Freude, die wir geben, kehrt ins eigene Herz zurück. Willst du glücklich sein im. - презентация
Willst du glücklich sein im Leben, trage bei zu andrer Glück, denn die Freude, die wir geben, kehrt ins eigene Herz zurück. Willst du glücklich sein im. - презентация Образ матери в искусстве
Образ матери в искусстве Гиподинамия
Гиподинамия  Здоровье, как его сберечь
Здоровье, как его сберечь Презентация на тему Возникновение искусства и религиозных верований
Презентация на тему Возникновение искусства и религиозных верований  Городской центр социальных и спортивных программ г. Севастополя Детско-юношеский клуб Салют
Городской центр социальных и спортивных программ г. Севастополя Детско-юношеский клуб Салют