- Математические аспекты КГ. Аффинная и перспективная геометрия

Содержание
- 2. Аффинные преобразования Преобразование плоскости называется аффинным, если оно взаимно однозначно и образом любой прямой является прямая.
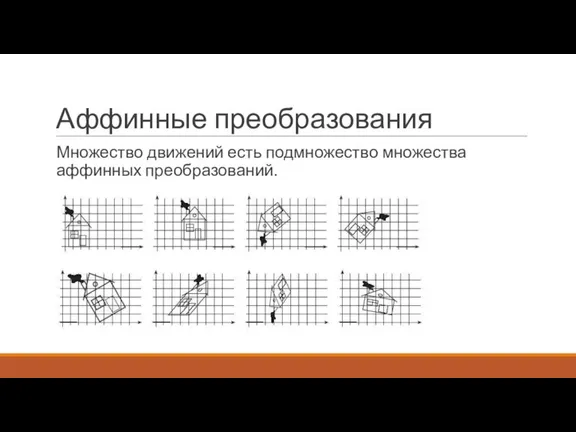
- 3. Аффинные преобразования Множество движений есть подмножество множества аффинных преобразований.
- 4. Аффинные преобразования Аффинное преобразование является комбинацией линейных преобразований, сопровождаемых переносом изображений.
- 5. Перспективные преобразования В перспективной геометрии нет двух линий, параллельных друг другу. Перспективное преобразование имеет место в
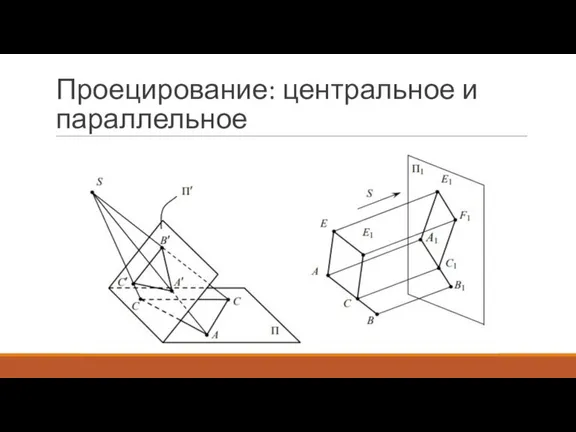
- 6. Проецирование: центральное и параллельное
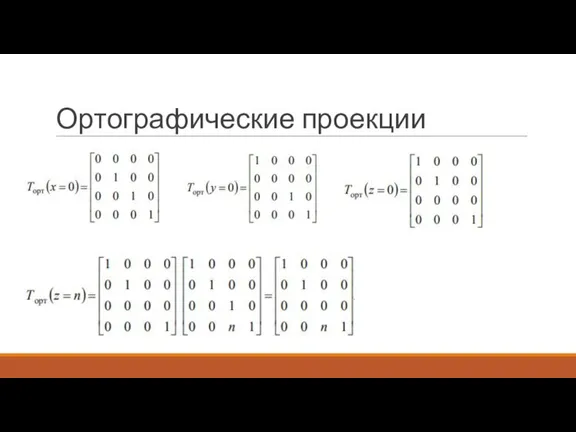
- 8. Ортографические проекции
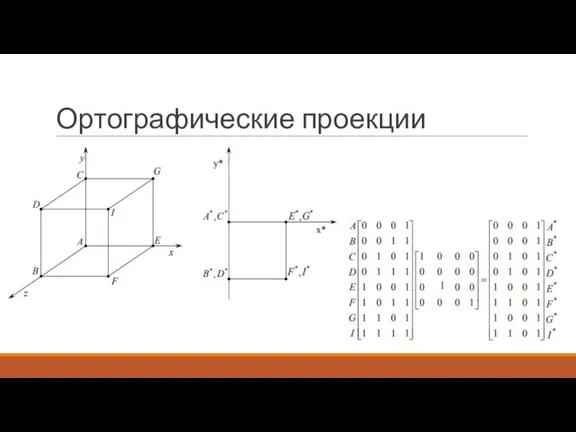
- 9. Ортографические проекции
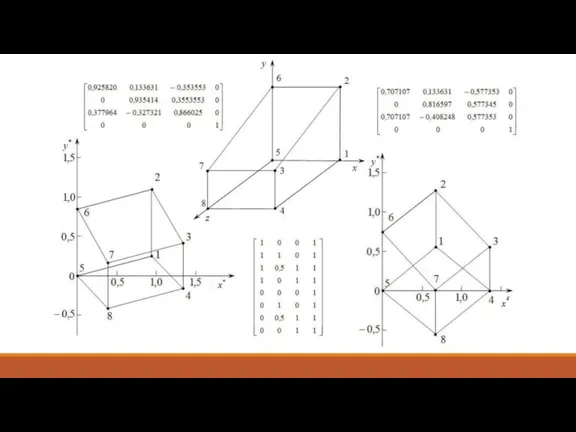
- 10. Аксонометрические проекции Аксонометрическая проекция получается с помощью аффинного преобразования, определитель которого равен нулю. изометрия – в
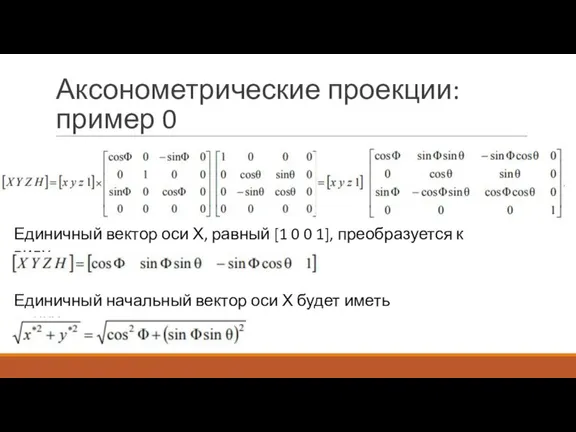
- 11. Аксонометрические проекции: пример 0 Единичный вектор оси Х, равный [1 0 0 1], преобразуется к виду
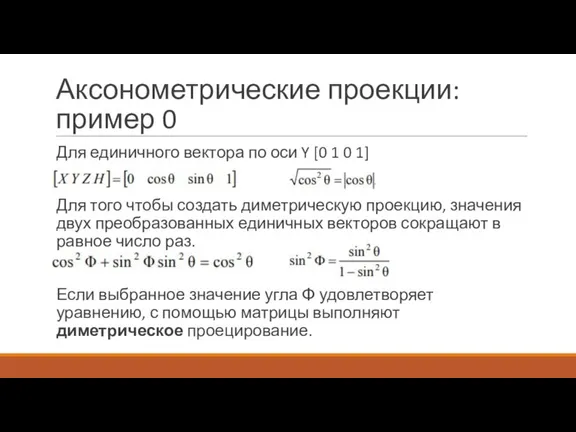
- 12. Аксонометрические проекции: пример 0 Для единичного вектора по оси Y [0 1 0 1] Для того
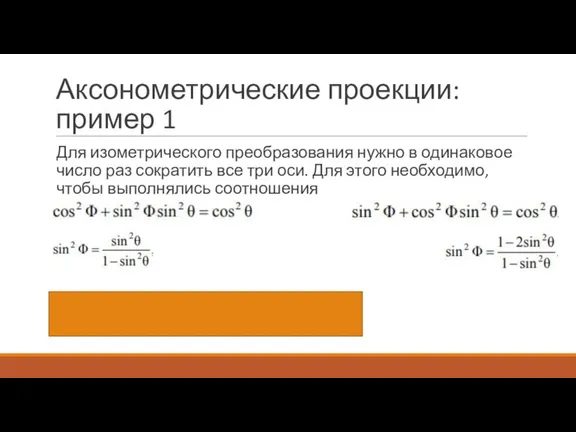
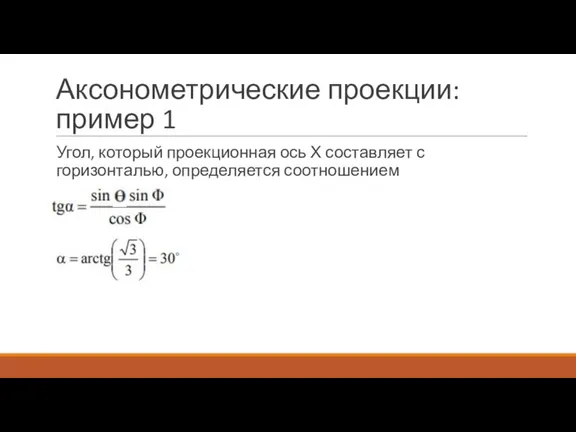
- 13. Аксонометрические проекции: пример 1 Для изометрического преобразования нужно в одинаковое число раз сократить все три оси.
- 14. Аксонометрические проекции: пример 1 Угол, который проекционная ось Х составляет с горизонталью, определяется соотношением
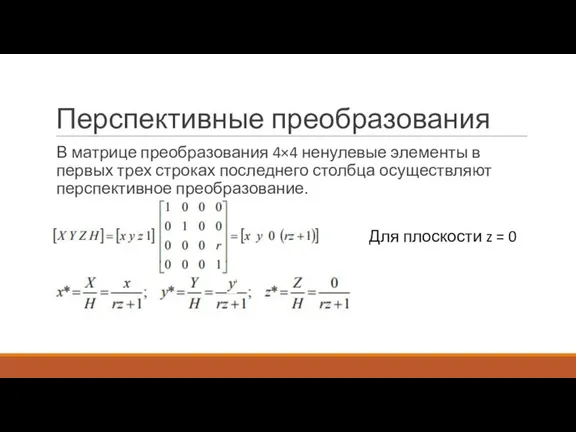
- 16. Перспективные преобразования В матрице преобразования 4×4 ненулевые элементы в первых трех строках последнего столбца осуществляют перспективное
- 18. Перспективные преобразования При z = 0 x* = x и y* = y. Вследствие этого преобразования
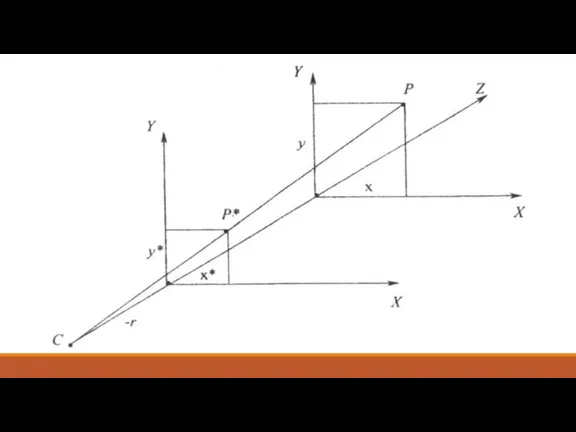
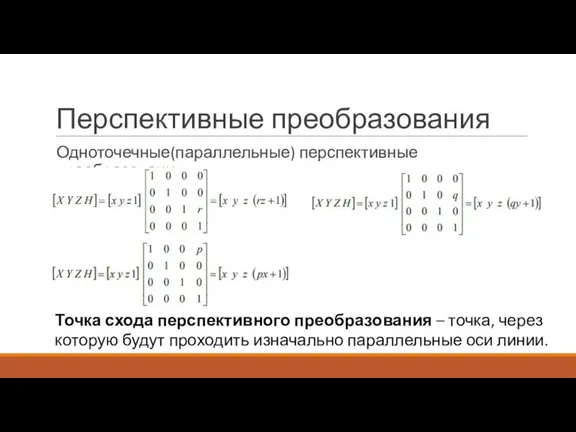
- 19. Перспективные преобразования Одноточечные(параллельные) перспективные преобразования: Точка схода перспективного преобразования – точка, через которую будут проходить изначально
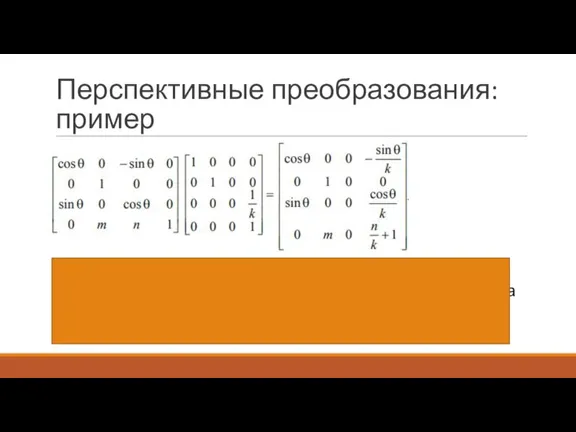
- 20. Перспективные преобразования: пример вращение куба вокруг оси Y и смещение к точке [0 m n] «наблюдение»
- 22. Стереографические проекции
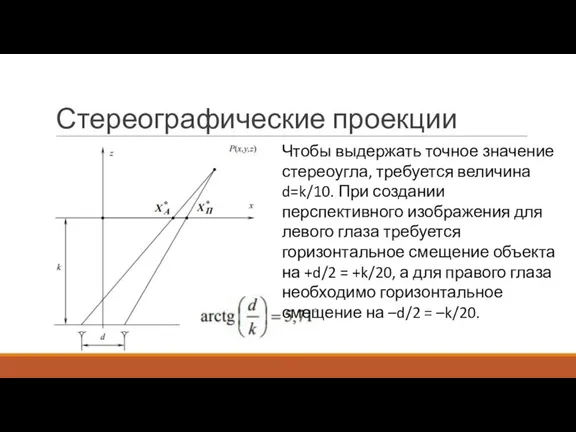
- 23. Стереографические проекции Чтобы выдержать точное значение стереоугла, требуется величина d=k/10. При создании перспективного изображения для левого
- 25. Скачать презентацию
Слайд 2Аффинные преобразования
Преобразование плоскости называется аффинным, если оно взаимно однозначно и образом любой прямой
Аффинные преобразования
Преобразование плоскости называется аффинным, если оно взаимно однозначно и образом любой прямой
Слайд 3Аффинные преобразования
Множество движений есть подмножество множества аффинных преобразований.
Аффинные преобразования
Множество движений есть подмножество множества аффинных преобразований.
Слайд 4Аффинные преобразования
Аффинное преобразование является комбинацией линейных преобразований, сопровождаемых переносом изображений.
Аффинные преобразования
Аффинное преобразование является комбинацией линейных преобразований, сопровождаемых переносом изображений.
Слайд 5Перспективные преобразования
В перспективной геометрии нет двух линий, параллельных друг другу.
Перспективное преобразование имеет
Перспективные преобразования
В перспективной геометрии нет двух линий, параллельных друг другу.
Перспективное преобразование имеет
Слайд 6Проецирование: центральное и параллельное
Проецирование: центральное и параллельное
Слайд 8Ортографические проекции
Ортографические проекции
Слайд 9Ортографические проекции
Ортографические проекции
Слайд 10Аксонометрические проекции
Аксонометрическая проекция получается с помощью аффинного преобразования, определитель которого равен нулю.
изометрия
Аксонометрические проекции
Аксонометрическая проекция получается с помощью аффинного преобразования, определитель которого равен нулю.
изометрия
Слайд 11Аксонометрические проекции: пример 0
Единичный вектор оси Х, равный [1 0 0 1],
Аксонометрические проекции: пример 0
Единичный вектор оси Х, равный [1 0 0 1],
Слайд 12Аксонометрические проекции: пример 0
Для единичного вектора по оси Y [0 1 0
Аксонометрические проекции: пример 0
Для единичного вектора по оси Y [0 1 0
Слайд 13Аксонометрические проекции: пример 1
Для изометрического преобразования нужно в одинаковое число раз сократить
Аксонометрические проекции: пример 1
Для изометрического преобразования нужно в одинаковое число раз сократить
Слайд 14Аксонометрические проекции: пример 1
Угол, который проекционная ось Х составляет с горизонталью, определяется
Аксонометрические проекции: пример 1
Угол, который проекционная ось Х составляет с горизонталью, определяется
Слайд 16Перспективные преобразования
В матрице преобразования 4×4 ненулевые элементы в первых трех строках последнего
Перспективные преобразования
В матрице преобразования 4×4 ненулевые элементы в первых трех строках последнего
Слайд 18Перспективные преобразования
При z = 0 x* = x и y* = y.
Перспективные преобразования
При z = 0 x* = x и y* = y.

Слайд 19Перспективные преобразования
Одноточечные(параллельные) перспективные преобразования:
Точка схода перспективного преобразования – точка, через которую будут
Перспективные преобразования
Одноточечные(параллельные) перспективные преобразования:
Точка схода перспективного преобразования – точка, через которую будут
Слайд 20Перспективные преобразования:
пример
вращение куба вокруг оси Y и смещение к точке [0 m
Перспективные преобразования:
пример
вращение куба вокруг оси Y и смещение к точке [0 m
Слайд 22Стереографические проекции
Стереографические проекции
Слайд 23Стереографические проекции
Чтобы выдержать точное значение стереоугла, требуется величина d=k/10. При создании перспективного
Стереографические проекции
Чтобы выдержать точное значение стереоугла, требуется величина d=k/10. При создании перспективного
 Геофизический мониторингподводных трубопроводовна основе НСП
Геофизический мониторингподводных трубопроводовна основе НСП Ассоциация Правообладателей и Поставщиков контента
Ассоциация Правообладателей и Поставщиков контента Презентация на тему Повышение роли таможни в обеспечении доходов государственной казны
Презентация на тему Повышение роли таможни в обеспечении доходов государственной казны  Здоровая работа. Волонтеры профессионального роста
Здоровая работа. Волонтеры профессионального роста Секретные задания Человека - паука
Секретные задания Человека - паука Признаки животных
Признаки животных Там есть сцена и кулисы, И актеры, и актрисы, Есть афиша и антракт, Декорации, аншлаг. И, конечно же, премьера! Догадались вы, наверно...
Там есть сцена и кулисы, И актеры, и актрисы, Есть афиша и антракт, Декорации, аншлаг. И, конечно же, премьера! Догадались вы, наверно... Казахстан в годы Великой Отечественной Войны
Казахстан в годы Великой Отечественной Войны Политический PR
Политический PR Создание педагогических условий для развития индивидуальности школьника
Создание педагогических условий для развития индивидуальности школьника Почвенные ресурсы России 8 класс
Почвенные ресурсы России 8 класс Использование на уроках литературы приемов технологии компетентностного подхода «Развитие критического мышления через чтение
Использование на уроках литературы приемов технологии компетентностного подхода «Развитие критического мышления через чтение  TERRA бағдарламасын пайдаланып төмен көміртекті феррохромды балқыту кезінде фазалық жағдайлардың
TERRA бағдарламасын пайдаланып төмен көміртекті феррохромды балқыту кезінде фазалық жағдайлардың Хлобчатобумажные и льняные ткани
Хлобчатобумажные и льняные ткани muzyka_i_kino
muzyka_i_kino Презентация (11)
Презентация (11) Презентация на тему Жизнь и творчество Уильяма Шекспира
Презентация на тему Жизнь и творчество Уильяма Шекспира  Презентация на тему Word building
Презентация на тему Word building Презентация на тему Функции тонкого и толстого кишечника Аппендицит
Презентация на тему Функции тонкого и толстого кишечника Аппендицит  Презентация на тему Открытие радиоактивности
Презентация на тему Открытие радиоактивности  Государство и право Древнего мира
Государство и право Древнего мира корпоротивное цен. предложение
корпоротивное цен. предложение Як ви знаєте Полтавщину. Гра
Як ви знаєте Полтавщину. Гра Презентация на тему Ребусы по информатике
Презентация на тему Ребусы по информатике 7 искушений Ивана Тургенева
7 искушений Ивана Тургенева Я и компьютер
Я и компьютер Новейшие технологии, средства защиты и очистки атмосферного воздуха от выбросов газа
Новейшие технологии, средства защиты и очистки атмосферного воздуха от выбросов газа Солнцеи жизнь Земли
Солнцеи жизнь Земли