- Матричные преобразования трехмерного пространства

Содержание
- 2. Проекции преобразуют точки из координатной системы размерности n в точки координатной системы размерности меньше n.
- 3. Проекции строятся с помощью прямых линий – проекторов (лучи проекции), пересекающих поверхность проекции; оперируют с плоскими
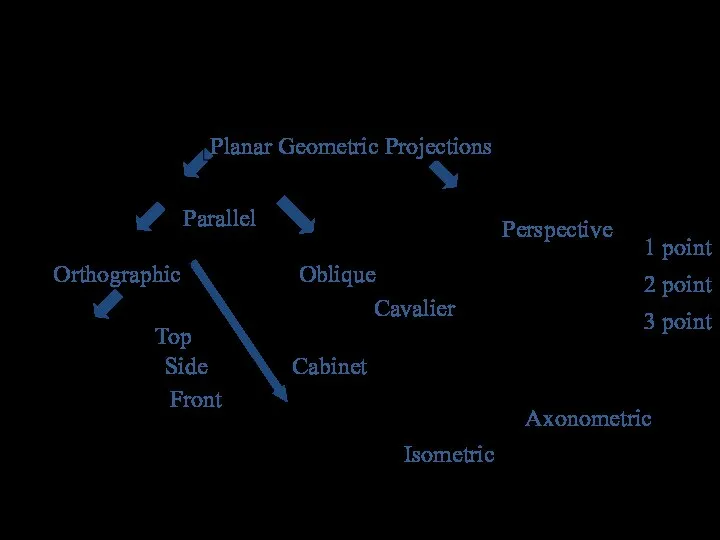
- 4. Классификация проекций ПРОЕКЦИИ одноточечные двухточечные трёхточечные Параллельные проекции Ортогональные Аксонометрические изометрия диметрия триметрия Косоугольные изометрия диметрия
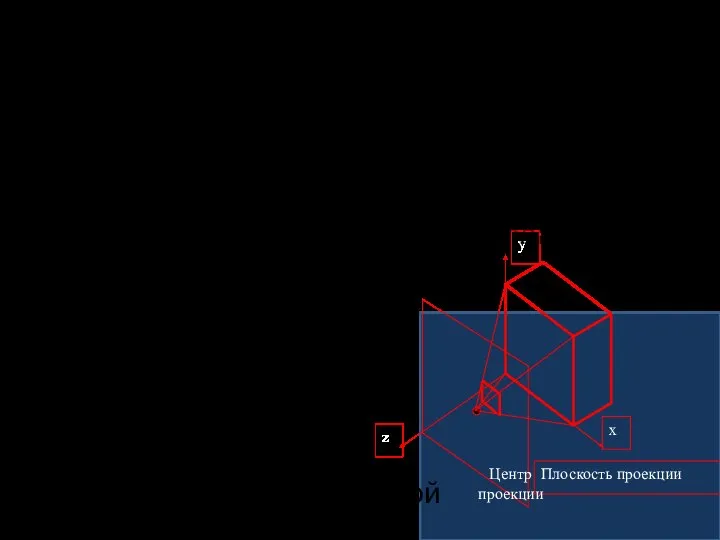
- 5. Центральные проекции
- 6. Центральные проекции Определяются плоскостью проекции и центром проекции. Визуальный эффект – перспективное искажение (перспектива). Размер проекций
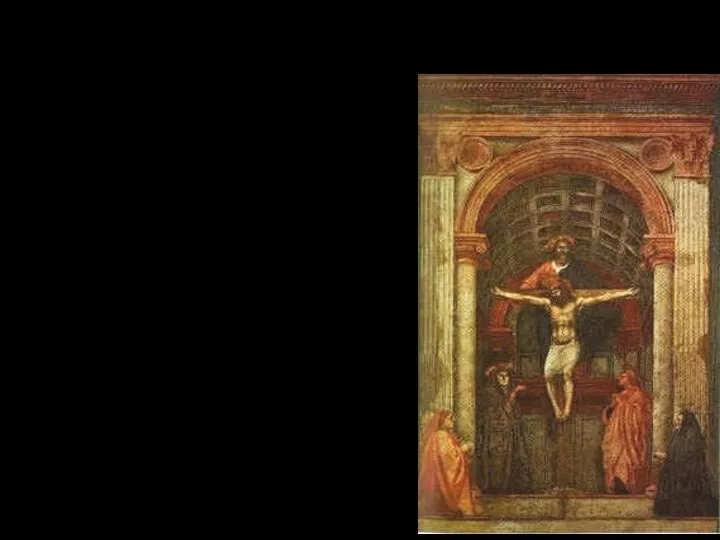
- 7. Перспектива (Perspective) Первое изображение с перспективой – "Троица" Мазаччо, 1427г.
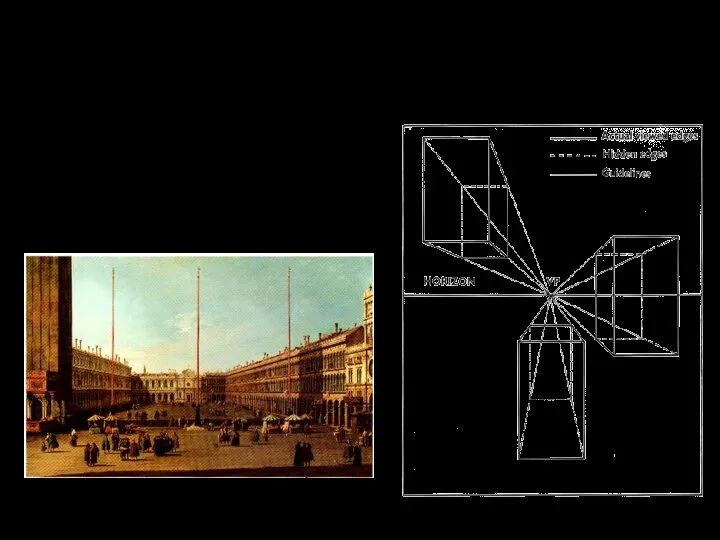
- 8. Центральные проекции Центральные проекции любой совокупности параллельных прямых, не параллельные проекционной плоскости, будут сходиться в центре
- 9. 1-точечная проекция Плоскость проекции пересекается только с одной осью. Точка схода в однородных координатах имеет w
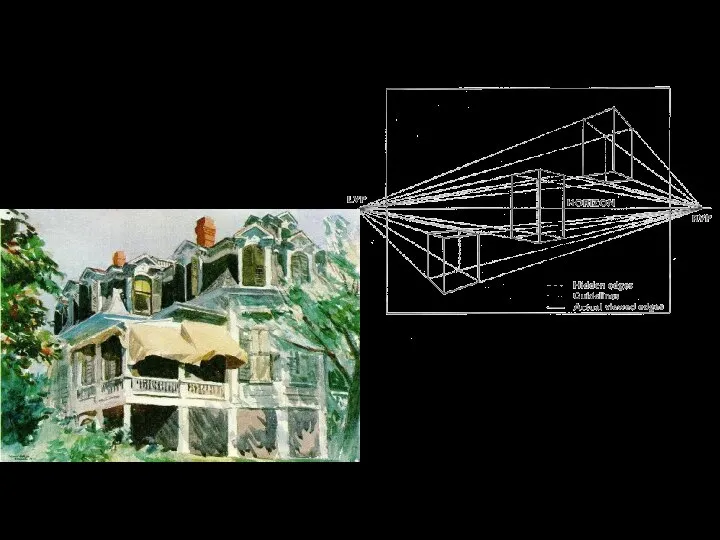
- 10. 2-х точечная проекция Edward Hopper The Mansard Roof 1923 г.
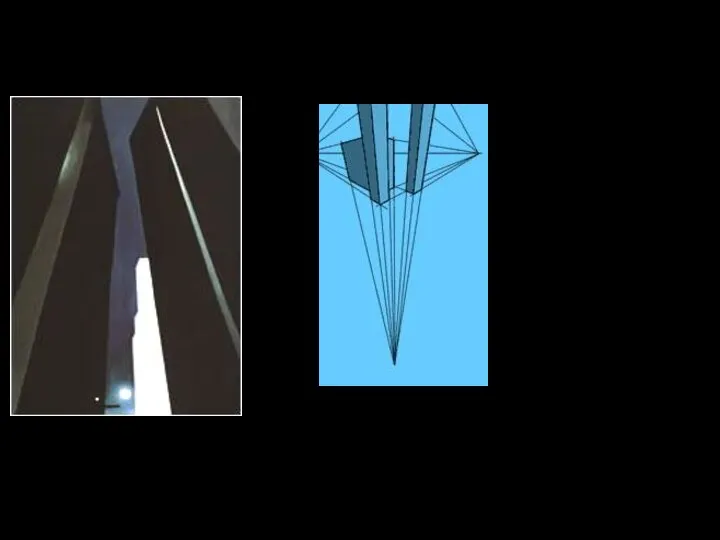
- 11. 3-х точечная проекция Georgia O'Keefe «City Night»,1926 г.
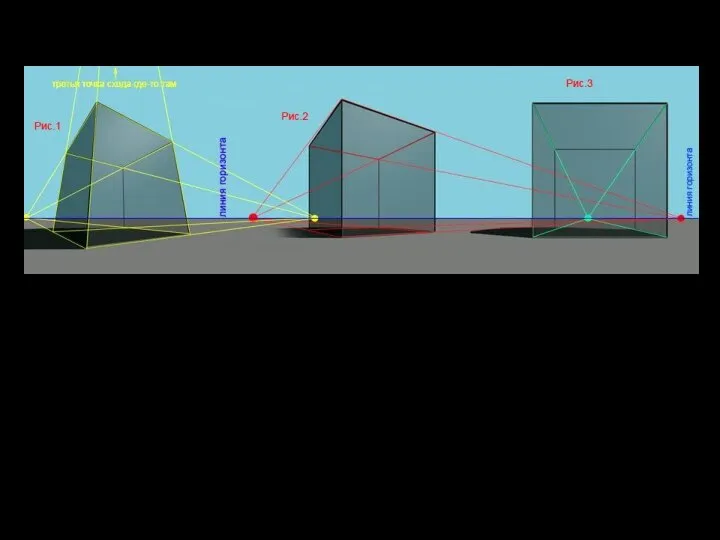
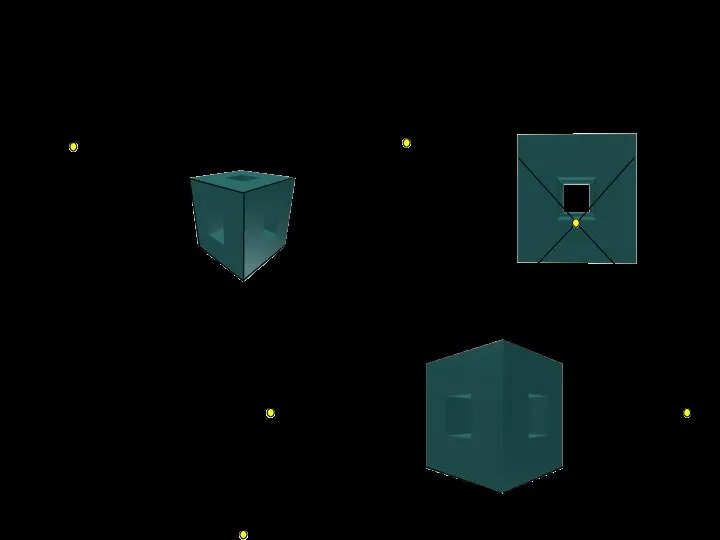
- 12. Центральные проекции 3-х точечная 2-х точечная 1- точечная
- 13. Параллельные проекции
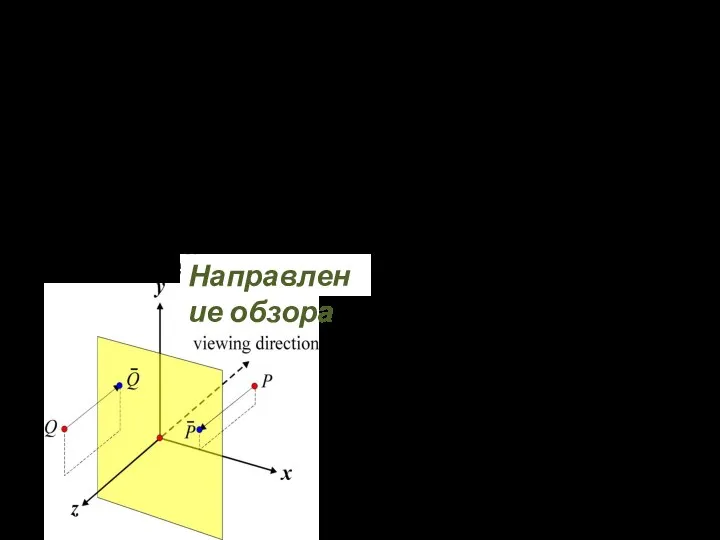
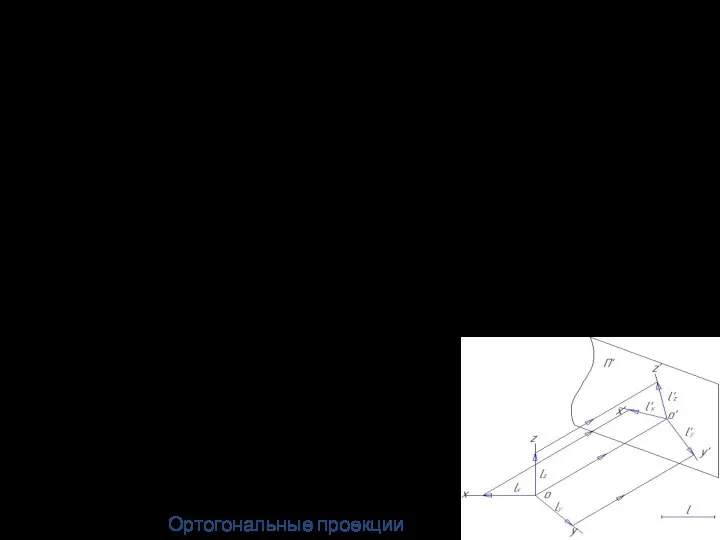
- 14. Ортогональные проекции Строится параллельным проецированием на плоскость отображения. Проецирующие лучи перпендикулярны к плоскости проекций. Обычно плоскость
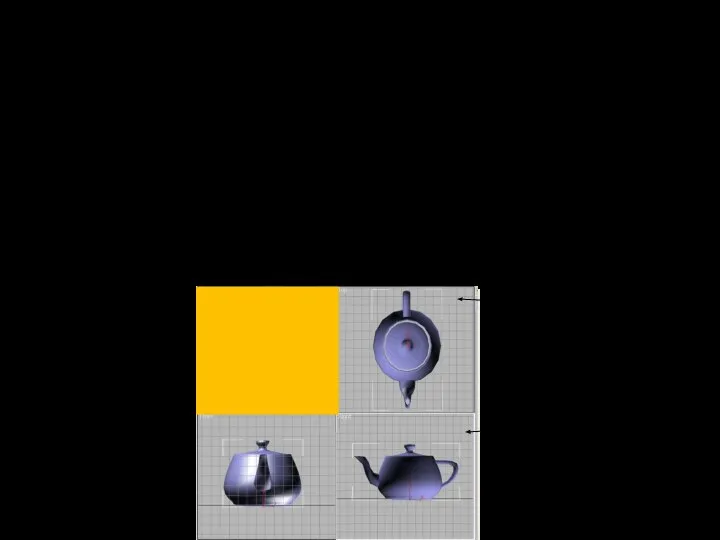
- 15. Множественные проекции (Multiple Projections) Ортогональные проекции часто используются для построения множественных проекций объекта: вид сверху или
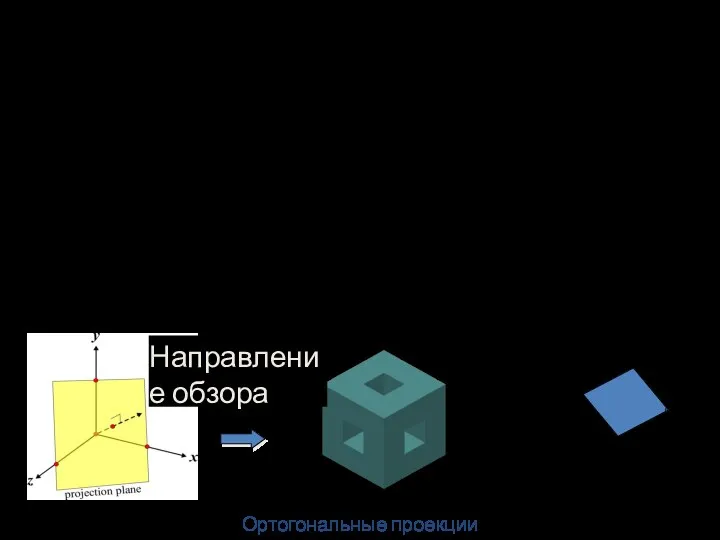
- 16. Проекционные плоскости не перпендикулярны осям координат. Одновременно видны несколько поверхностей объекта. Используется для измерений: углы изменяются;
- 17. Основная теорема аксонометрии: теорема Польке: «три отрезка произвольной длины, лежащие в 1-й плоскости и выходящие из
- 18. Согласно этой теореме: любые три прямые в плоскости, исходящие из одной точки и не совпадающие между
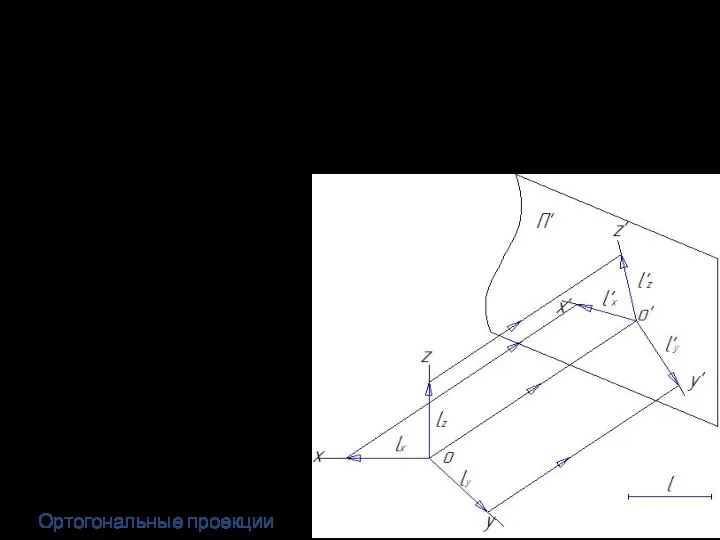
- 19. Отношение единичных отрезков на аксонометрических осях к единичным отрезкам на координатных осях называется коэффициентом искажения (коэффициентом
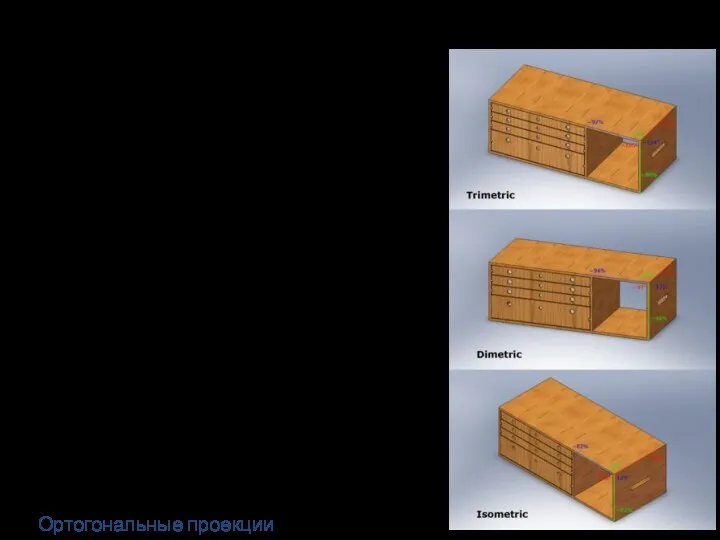
- 20. Если коэф. искажения по всем трём осям не равны p≠q≠r, то проекция называется триметрической. Если коэф.
- 21. p≠q ≠ r , триметрическая проекция p=r, q=1/2p, диметрическая проекция p=q=r , изометрическая проекция Ортогональные проекции
- 22. Изометрическая прямоугольная проекция Наиболее распространенный случай аксонометрических проекций. Нормаль плоскости проекции образует равные углы с каждой
- 23. Коэффициенты искажения: По теореме синусов: sin2 α +sin2 β +sin2 γ =1 sin2 α =1-cos2 α
- 24. p2+q2+r2=2 – для прямоугольной аксонометрии сумма квадратов коэффициентов искажения = 2. Установим численные значения коэффициентов искажения
- 25. Треугольник следов – равносторонний. Угол между высотами в равностороннем треугольнике = 120°. Ось z располагается вертикально.
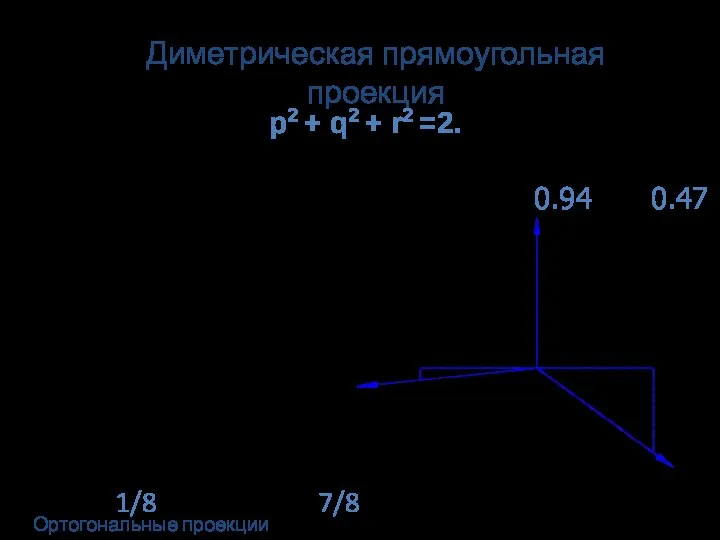
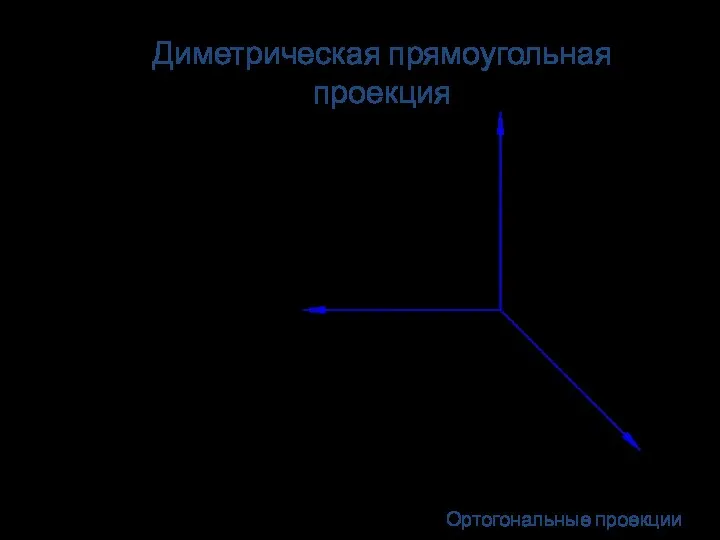
- 26. Треугольник следов – равнобедренный. Приближённо аксонометрические оси диметрической проекции можно построить, если принять tg 7°10'=1/8, а
- 27. На практике используют приведённые коэффициенты искажения p=r=1; q=0,5. Тогда получается проекция, увеличенная в 1,06 раза. Диметрическая
- 28. Косоугольные проекции Нормаль плоскости параллельна оси X Лучи составляют с плоскостью проекции угол до 90°.
- 29. Косоугольные проекции Нормаль плоскости проекции не совпадает с направлением проецирующих лучей. Плоскость проекции перпендикулярна одной из
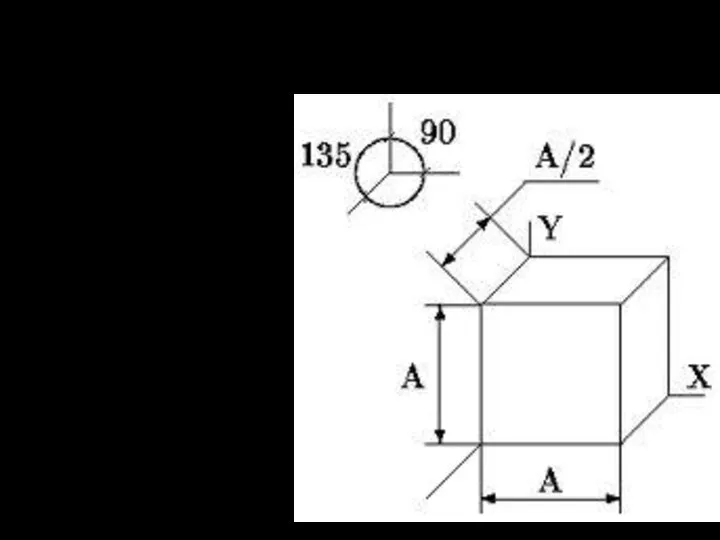
- 30. Косоугольная фронтальная диметрия (Cabinet) p = r = 1.0; q = 0.5; β = γ =135
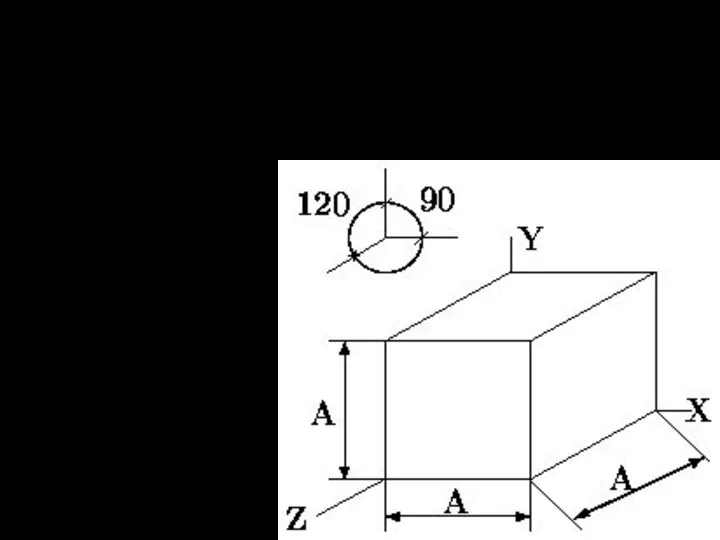
- 31. Косоугольная горизонтальная изометрия (Cavalier) p = r = q = 1.0; = γ =120 ; α
- 32. Проекции в однородных координатах
- 33. Аксонометрические проекции могут реализовываться с помощью 2-х поворотов объекта и ортогонального проецирования (переноса) на плоскость, что
- 34. Аксонометрические проекции
- 35. Единичный вектор OX: [1001], если его повернуть: Единичный вектор OY: [0101], если его повернуть: Координаты вектора
- 36. Для изометрии справедливо p=r=q, 3p2=2. Тогда: Для диметрии справедливо: p=r=2q; 2p2 + p2/4 = 2. Тогда
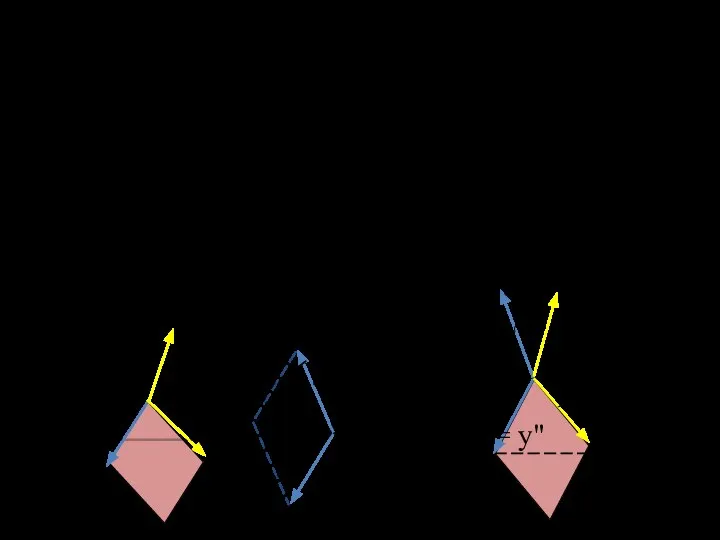
- 37. Точка P=(0,0,1) проецируется в точку P’. Плоскость проекции совпадает с XOY. Направление проецирования задаётся: (Lcosα, Lsinα,-1),L=1/tan(β);
- 38. Матрица косоугольной проекции для случая проецирования в плоскость Z = 0, выполняет: плоскости с заданной координатой
- 39. Более сложные! Для построения учитываются: ракурс; перспективы; объём видимости (в виде усечённой пирамиды) или угол обзора
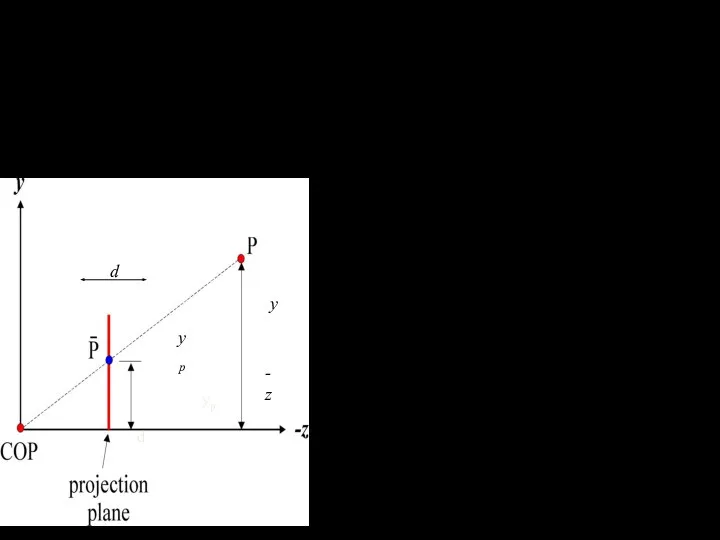
- 40. Если поместить центр проекции в центр координат и направление взгляда ориентировать по положительному направлению оси –z,
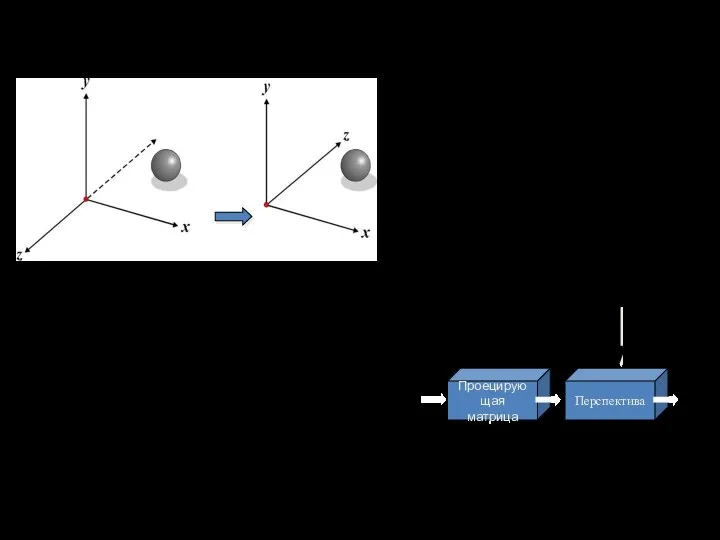
- 41. Отражение оси z для перехода в левую систему координат ⇒ увеличение z подразумевает увеличение расстояния до
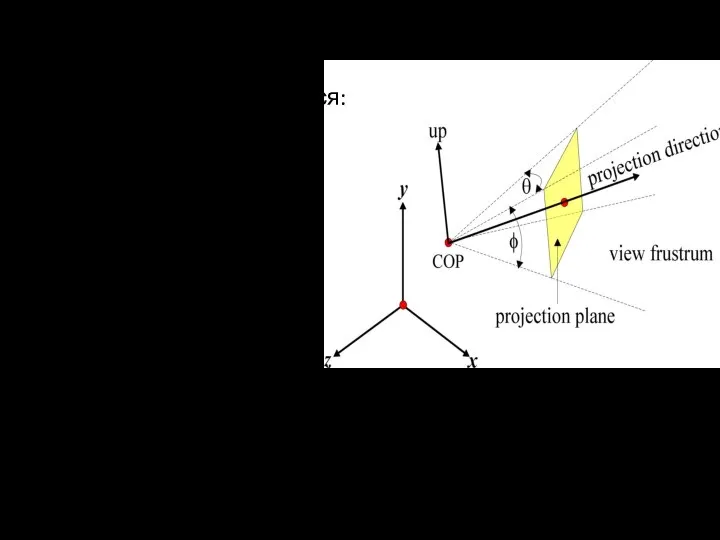
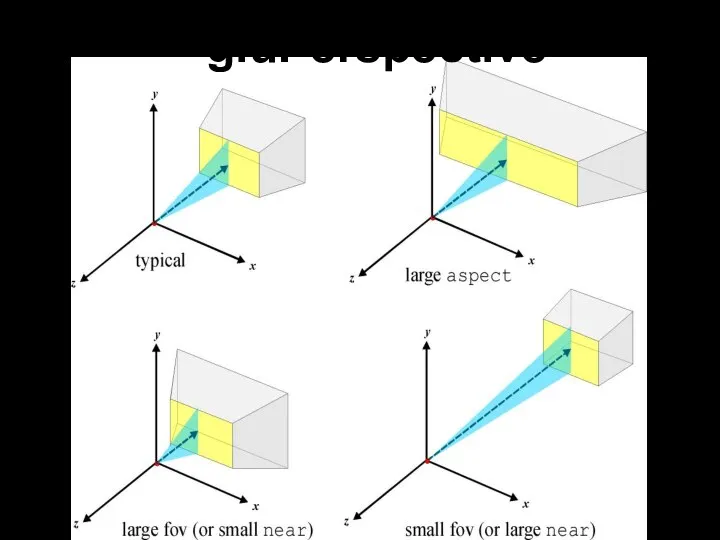
- 42. В зависимости от приложений могут использоваться различные механизмы для задания перспективных искажений: углы обзора (field of
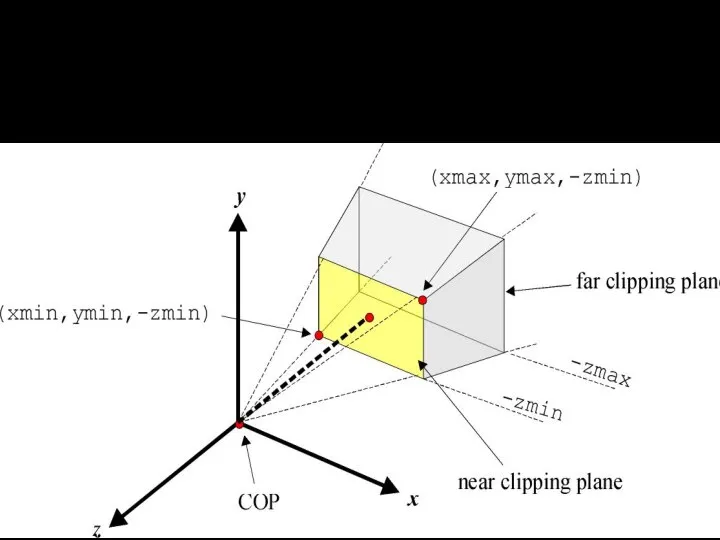
- 43. glFrustrum(xmin, xmax, ymin, ymax, zmin, zmax); Центральные проекции
- 44. glFrustrum Все точки на линии задаваемой COP и координатами(xmin,ymin,-zmin)будут спроецированы в нижнюю левую точку устройства вывода.
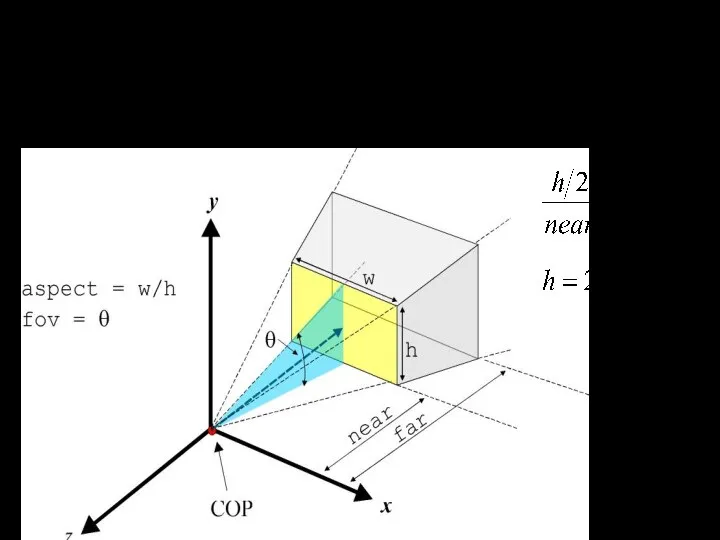
- 45. gluPerspective(fov, aspect, near, far); Центральные проекции
- 46. gluPerspective Предназначение функции упростить определение перспективных проекций. Позволяет создавать симметричные раструбы камеры (symmetric frustrums). Точка наблюдения
- 47. gluPerspective
- 49. Скачать презентацию
Слайд 2Проекции
преобразуют точки из координатной системы размерности n в точки координатной системы размерности
Проекции
преобразуют точки из координатной системы размерности n в точки координатной системы размерности
Слайд 3Проекции
строятся с помощью прямых линий –
проекторов (лучи проекции), пересекающих поверхность проекции;
оперируют
Проекции
строятся с помощью прямых линий –
проекторов (лучи проекции), пересекающих поверхность проекции;
оперируют
Слайд 4Классификация проекций
ПРОЕКЦИИ
одноточечные
двухточечные
трёхточечные
Параллельные проекции
Ортогональные
Аксонометрические
изометрия
диметрия
триметрия
Косоугольные
изометрия
диметрия
Planar Geometric Projections
Parallel
Perspective
Центральные проекции
3 point
2 point
1 point
Oblique
Cabinet
Cavalier
Axonometric
Top
Side
Front
Isometric
вид сверху
вид слева
фронтальный
Orthographic
Классификация проекций
ПРОЕКЦИИ
одноточечные
двухточечные
трёхточечные
Параллельные проекции
Ортогональные
Аксонометрические
изометрия
диметрия
триметрия
Косоугольные
изометрия
диметрия
Planar Geometric Projections
Parallel
Perspective
Центральные проекции
3 point
2 point
1 point
Oblique
Cabinet
Cavalier
Axonometric
Top
Side
Front
Isometric
вид сверху
вид слева
фронтальный
Orthographic
Слайд 5Центральные проекции
Центральные проекции
Слайд 6Центральные проекции
Определяются плоскостью проекции и центром проекции.
Визуальный эффект – перспективное искажение (перспектива).
Размер
Центральные проекции
Определяются плоскостью проекции и центром проекции.
Визуальный эффект – перспективное искажение (перспектива).
Размер
Слайд 7Перспектива (Perspective)
Первое изображение
с перспективой –
"Троица" Мазаччо, 1427г.
Перспектива (Perspective)
Первое изображение
с перспективой –
"Троица" Мазаччо, 1427г.
Слайд 8Центральные проекции
Центральные проекции любой совокупности параллельных прямых, не параллельные проекционной плоскости,
Центральные проекции
Центральные проекции любой совокупности параллельных прямых, не параллельные проекционной плоскости,
Слайд 91-точечная проекция
Плоскость проекции пересекается только с одной осью.
Точка схода в однородных координатах
1-точечная проекция
Плоскость проекции пересекается только с одной осью.
Точка схода в однородных координатах
Слайд 102-х точечная проекция
Edward Hopper The Mansard Roof 1923 г.
2-х точечная проекция
Edward Hopper The Mansard Roof 1923 г.
Слайд 113-х точечная проекция
Georgia O'Keefe «City Night»,1926 г.
3-х точечная проекция
Georgia O'Keefe «City Night»,1926 г.
Слайд 12Центральные проекции
3-х точечная
2-х точечная
1- точечная
Центральные проекции
3-х точечная
2-х точечная
1- точечная
Слайд 13Параллельные проекции
Параллельные проекции
Слайд 14Ортогональные проекции
Строится параллельным проецированием на плоскость отображения.
Проецирующие лучи перпендикулярны к плоскости проекций.
Обычно
Ортогональные проекции
Строится параллельным проецированием на плоскость отображения.
Проецирующие лучи перпендикулярны к плоскости проекций.
Обычно
Слайд 15Множественные проекции (Multiple Projections)
Ортогональные проекции часто используются для построения множественных проекций объекта:
вид
Множественные проекции (Multiple Projections)
Ортогональные проекции часто используются для построения множественных проекций объекта:
вид
Слайд 16Проекционные плоскости не перпендикулярны осям координат.
Одновременно видны несколько поверхностей объекта.
Используется для измерений:
углы
Проекционные плоскости не перпендикулярны осям координат.
Одновременно видны несколько поверхностей объекта.
Используется для измерений:
углы
Слайд 17Основная теорема аксонометрии:
теорема Польке: «три отрезка произвольной длины, лежащие в 1-й плоскости
Основная теорема аксонометрии:
теорема Польке: «три отрезка произвольной длины, лежащие в 1-й плоскости
Слайд 18Согласно этой теореме:
любые три прямые в плоскости, исходящие из одной точки и
Согласно этой теореме:
любые три прямые в плоскости, исходящие из одной точки и
Слайд 19Отношение единичных отрезков на аксонометрических осях к единичным отрезкам на координатных осях
Отношение единичных отрезков на аксонометрических осях к единичным отрезкам на координатных осях
Слайд 20Если коэф. искажения по всем трём осям не равны
p≠q≠r, то проекция называется
Если коэф. искажения по всем трём осям не равны
p≠q≠r, то проекция называется
Слайд 21p≠q ≠ r ,
триметрическая проекция
p=r, q=1/2p,
диметрическая проекция
p=q=r , изометрическая проекция
p≠q ≠ r ,
триметрическая проекция
p=r, q=1/2p,
диметрическая проекция
p=q=r , изометрическая проекция
Слайд 22Изометрическая прямоугольная проекция
Наиболее распространенный случай аксонометрических проекций.
Нормаль плоскости проекции образует равные углы
Изометрическая прямоугольная проекция
Наиболее распространенный случай аксонометрических проекций.
Нормаль плоскости проекции образует равные углы
Слайд 23Коэффициенты искажения:
По теореме синусов:
sin2 α +sin2 β +sin2 γ =1
sin2
Коэффициенты искажения:
По теореме синусов:
sin2 α +sin2 β +sin2 γ =1
sin2
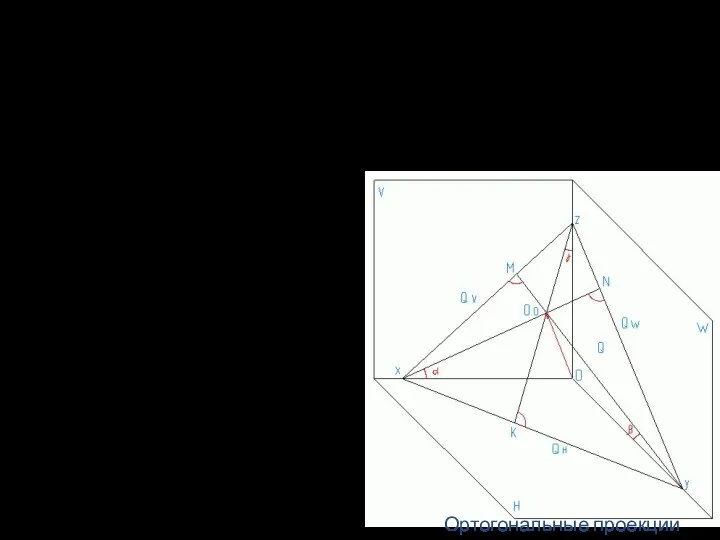
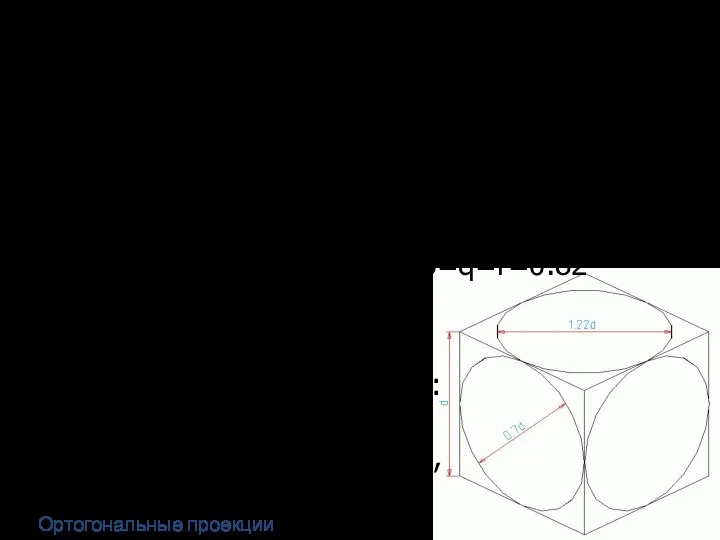
Слайд 24p2+q2+r2=2 – для прямоугольной аксонометрии
сумма квадратов коэффициентов искажения = 2.
Установим численные
p2+q2+r2=2 – для прямоугольной аксонометрии
сумма квадратов коэффициентов искажения = 2.
Установим численные
Слайд 25Треугольник следов – равносторонний.
Угол между высотами в равностороннем треугольнике = 120°.
Ось
Треугольник следов – равносторонний.
Угол между высотами в равностороннем треугольнике = 120°.
Ось
Слайд 26Треугольник следов – равнобедренный.
Приближённо аксонометрические
оси диметрической
проекции можно
построить, если принять
Треугольник следов – равнобедренный.
Приближённо аксонометрические
оси диметрической
проекции можно
построить, если принять
Слайд 27
На практике используют приведённые коэффициенты искажения
p=r=1; q=0,5.
Тогда
получается
проекция,
На практике используют приведённые коэффициенты искажения
p=r=1; q=0,5.
Тогда
получается
проекция,
Слайд 28 Косоугольные проекции
Нормаль плоскости
параллельна оси X
Лучи составляют с плоскостью проекции угол
Косоугольные проекции
Нормаль плоскости
параллельна оси X
Лучи составляют с плоскостью проекции угол
Слайд 29Косоугольные проекции
Нормаль плоскости проекции не совпадает с направлением проецирующих лучей.
Плоскость проекции перпендикулярна
Косоугольные проекции
Нормаль плоскости проекции не совпадает с направлением проецирующих лучей.
Плоскость проекции перпендикулярна
Слайд 30Косоугольная фронтальная диметрия (Cabinet)
p = r = 1.0; q = 0.5;
β
Косоугольная фронтальная диметрия (Cabinet)
p = r = 1.0; q = 0.5;
β
Слайд 31Косоугольная горизонтальная изометрия (Cavalier)
p = r = q = 1.0;
=
Косоугольная горизонтальная изометрия (Cavalier)
p = r = q = 1.0;
=
Слайд 32Проекции в однородных координатах
Проекции в однородных координатах
Слайд 33Аксонометрические проекции могут реализовываться с помощью 2-х поворотов объекта и ортогонального проецирования
Аксонометрические проекции могут реализовываться с помощью 2-х поворотов объекта и ортогонального проецирования
Слайд 34Аксонометрические проекции
Аксонометрические проекции
Слайд 35Единичный вектор OX: [1001], если его повернуть:
Единичный вектор OY: [0101], если
Единичный вектор OX: [1001], если его повернуть:
Единичный вектор OY: [0101], если
![Единичный вектор OX: [1001], если его повернуть: Единичный вектор OY: [0101], если](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1120854/slide-34.jpg)
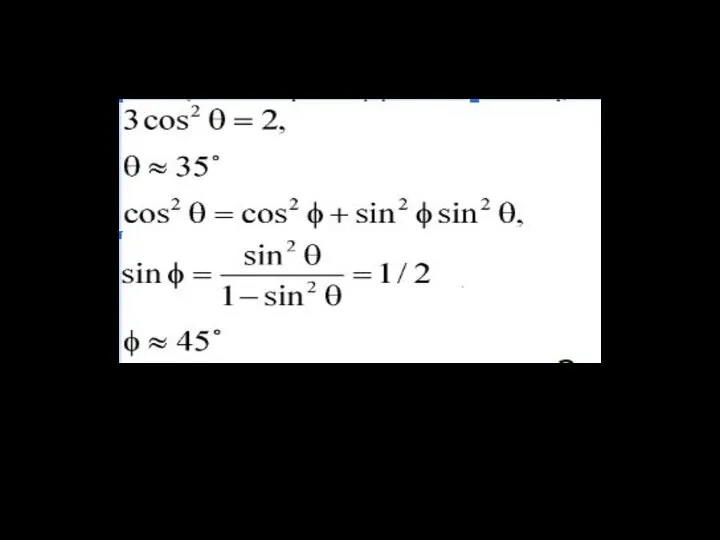
Слайд 36Для изометрии справедливо p=r=q, 3p2=2.
Тогда:
Для диметрии справедливо: p=r=2q; 2p2 + p2/4
Для изометрии справедливо p=r=q, 3p2=2.
Тогда:
Для диметрии справедливо: p=r=2q; 2p2 + p2/4
Слайд 37Точка P=(0,0,1) проецируется в точку P’.
Плоскость проекции совпадает с XOY.
Направление проецирования задаётся:
Точка P=(0,0,1) проецируется в точку P’.
Плоскость проекции совпадает с XOY.
Направление проецирования задаётся:
Слайд 38Матрица косоугольной проекции для случая проецирования в плоскость Z = 0, выполняет:
Матрица косоугольной проекции для случая проецирования в плоскость Z = 0, выполняет:
Слайд 39Более сложные!
Для построения учитываются:
ракурс;
перспективы;
объём видимости (в виде
усечённой пирамиды) или
угол
Более сложные!
Для построения учитываются:
ракурс;
перспективы;
объём видимости (в виде
усечённой пирамиды) или
угол
Слайд 40Если поместить центр проекции в центр координат и
направление взгляда ориентировать по
Если поместить центр проекции в центр координат и
направление взгляда ориентировать по
Слайд 41Отражение оси z для перехода в левую систему координат ⇒ увеличение z
Отражение оси z для перехода в левую систему координат ⇒ увеличение z
Слайд 42В зависимости от приложений могут использоваться различные механизмы для задания перспективных искажений:
углы
В зависимости от приложений могут использоваться различные механизмы для задания перспективных искажений:
углы
Слайд 43glFrustrum(xmin, xmax, ymin, ymax, zmin, zmax);
Центральные проекции
glFrustrum(xmin, xmax, ymin, ymax, zmin, zmax);
Центральные проекции
Слайд 44glFrustrum
Все точки на линии задаваемой COP и координатами(xmin,ymin,-zmin)будут спроецированы в нижнюю левую
glFrustrum
Все точки на линии задаваемой COP и координатами(xmin,ymin,-zmin)будут спроецированы в нижнюю левую
Слайд 45gluPerspective(fov, aspect, near, far);
Центральные проекции
gluPerspective(fov, aspect, near, far);
Центральные проекции
Слайд 46gluPerspective
Предназначение функции упростить определение перспективных проекций.
Позволяет создавать симметричные раструбы камеры (symmetric frustrums).
Точка
gluPerspective
Предназначение функции упростить определение перспективных проекций.
Позволяет создавать симметричные раструбы камеры (symmetric frustrums).
Точка
Слайд 47gluPerspective
gluPerspective
 Принцип выставления задачи по реализации ассортимента MUST в торговые точки
Принцип выставления задачи по реализации ассортимента MUST в торговые точки УДОВЛЕТВОРЕННОСТЬ НАСЕЛЕНИЯ РЕСПУБЛИКИ ТАТАРСТАН ОСНОВНЫМИ СОСТАВЛЯЮЩИМИ КАЧЕСТВА ЖИЗНИ И ПРОВОДИМЫМИ СОЦИАЛЬНЫМИ И ЭКОНОМИЧ
УДОВЛЕТВОРЕННОСТЬ НАСЕЛЕНИЯ РЕСПУБЛИКИ ТАТАРСТАН ОСНОВНЫМИ СОСТАВЛЯЮЩИМИ КАЧЕСТВА ЖИЗНИ И ПРОВОДИМЫМИ СОЦИАЛЬНЫМИ И ЭКОНОМИЧ Задача создания инновационных кластеров в Санкт-Петербурге в контексте зарубежного опыта
Задача создания инновационных кластеров в Санкт-Петербурге в контексте зарубежного опыта Презентация на тему: «Дети из асоциальных семей».
Презентация на тему: «Дети из асоциальных семей». Серия шампуней и кондиционеров Green style разработана для тех, кто не хочет тратить много времени на уход за волосами, но требует высок
Серия шампуней и кондиционеров Green style разработана для тех, кто не хочет тратить много времени на уход за волосами, но требует высок Корни и корневые системы
Корни и корневые системы Research Question ( Week 3) (1)
Research Question ( Week 3) (1) Поздравление для ветеранов ВОВ
Поздравление для ветеранов ВОВ 1)У Пети 6 марок, а у Кати в 2 раза больше. Сколько марок у Кати? 2) У Маши 6 значков, а у Даши на 2 меньше. Сколько значков у Кати? 3)В корзин
1)У Пети 6 марок, а у Кати в 2 раза больше. Сколько марок у Кати? 2) У Маши 6 значков, а у Даши на 2 меньше. Сколько значков у Кати? 3)В корзин Тема урока: Строение и работа сердца
Тема урока: Строение и работа сердца Необыкновенные уголки Земли. Фото
Необыкновенные уголки Земли. Фото Ощущения. Адаптация
Ощущения. Адаптация Мотоциклы Британии
Мотоциклы Британии Одежда, косметика, эмблемы, артефакты и их роль в коммуникации
Одежда, косметика, эмблемы, артефакты и их роль в коммуникации Электрическое поле. Напряжённость электрического поля
Электрическое поле. Напряжённость электрического поля Страхование ответственности владельцев опасных объектов
Страхование ответственности владельцев опасных объектов АРГЕНТИНА
АРГЕНТИНА Презентация на тему Ветер
Презентация на тему Ветер для бота2_2 (3)
для бота2_2 (3) Управление репутацией и репутационные риски в Интернете
Управление репутацией и репутационные риски в Интернете Ненормативные аспекты трансформации судебной власти: Некоторые результаты экспертной оценки функционирования судебной власти
Ненормативные аспекты трансформации судебной власти: Некоторые результаты экспертной оценки функционирования судебной власти  Гравитационное поле Земли
Гравитационное поле Земли Индустриализация в СССР
Индустриализация в СССР Ремёсла. Домашнее Ремесло
Ремёсла. Домашнее Ремесло Искусство Византии
Искусство Византии Правила поведения в общественных местах
Правила поведения в общественных местах Презентация на тему Обитатели Балтийского моря
Презентация на тему Обитатели Балтийского моря Лоис Лоури Дающий
Лоис Лоури Дающий