- Метод автоматизированного анализа эмульсионных данных для измеренияспектра ПКИ

Содержание
- 2. Эксперимент RUNJOB Площадь камеры 50см×80см Высота полета ~32 км (10 г/см2) Время одного полета ~150 часов
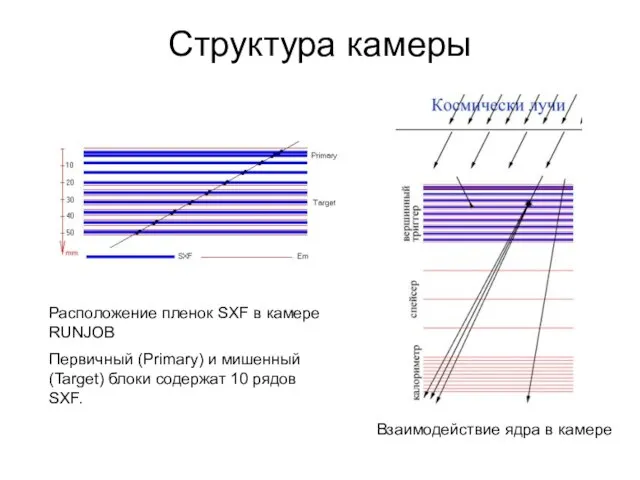
- 3. Структура камеры Расположение пленок SXF в камере RUNJOB Первичный (Primary) и мишенный (Target) блоки содержат 10
- 4. Алгоритм вершинного триггера поиск опорных треков, (найдено вручную 12 треков) «сшивка» камеры, восстановление общей системы координат,
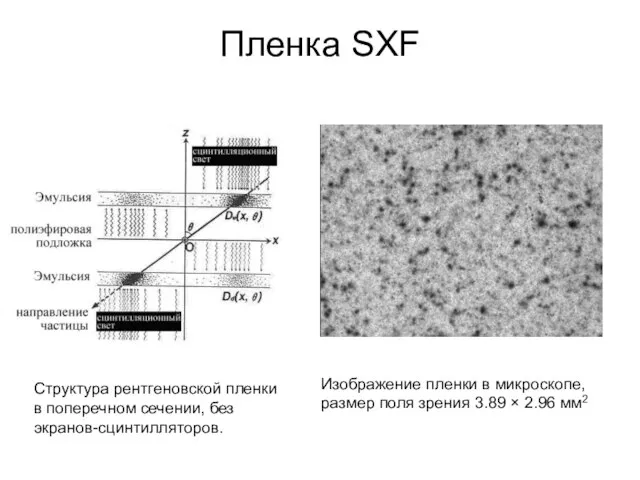
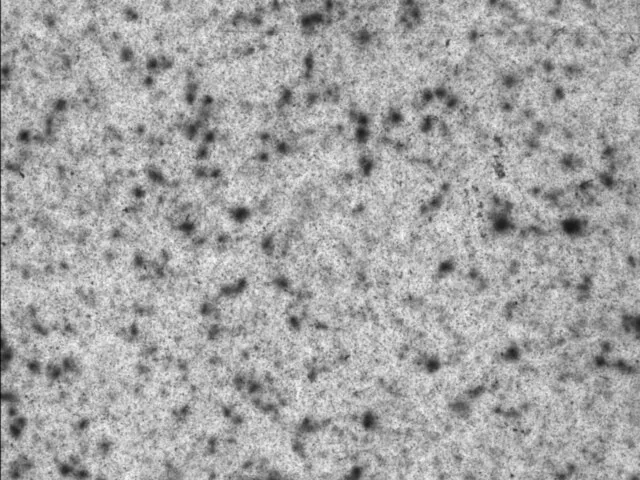
- 5. Пленка SXF Структура рентгеновской пленки в поперечном сечении, без экранов-сцинтилляторов. Изображение пленки в микроскопе, размер поля
- 6. Измерительная система Механически стол MICOS Оптическая система Система ввода изображения Персональный компьютер Программное обеспечение
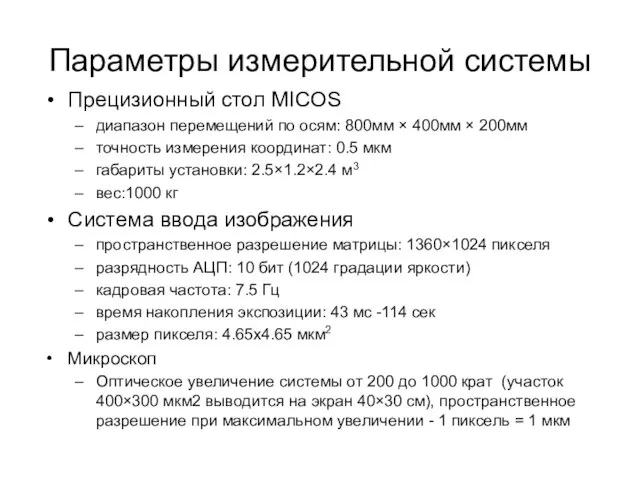
- 7. Параметры измерительной системы Прецизионный стол MICOS диапазон перемещений по осям: 800мм × 400мм × 200мм точность
- 8. Внешний вид установки Чистая комната Оптическая система контроллер джойстик
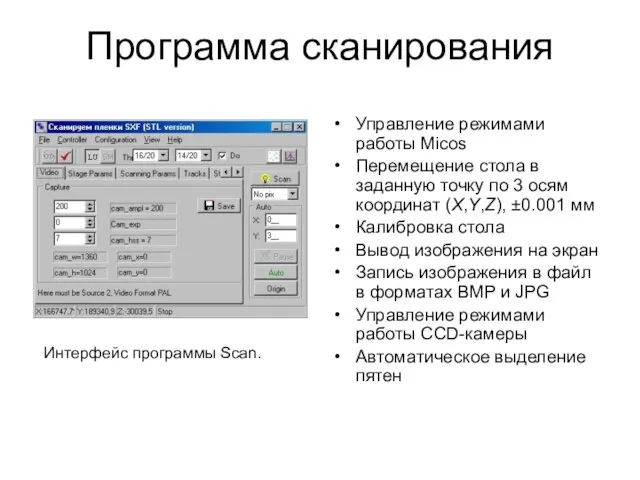
- 9. Программа сканирования Управление режимами работы Micos Перемещение стола в заданную точку по 3 осям координат (X,Y,Z),
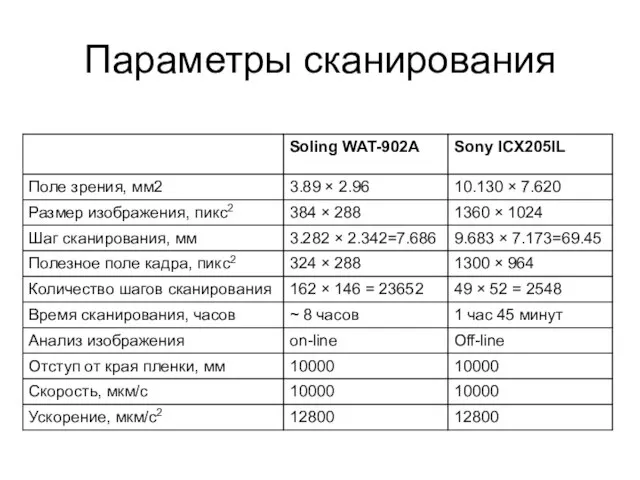
- 10. Параметры сканирования
- 12. Пошаговое сканирование Положение системы координат пленки и системы координат стола Micos. Показаны отступы при сканировании от
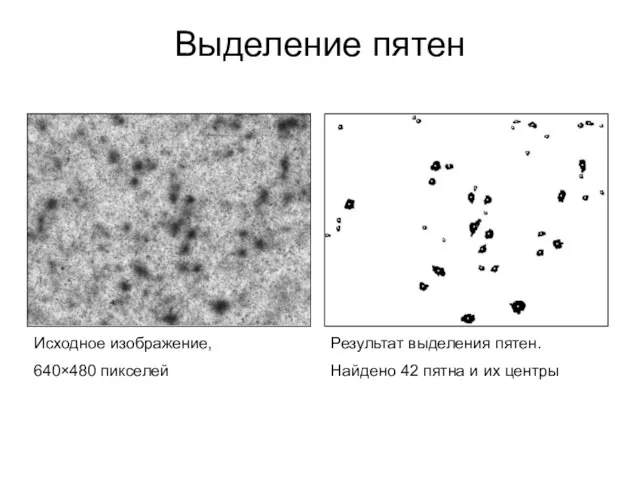
- 13. Выделение пятен Исходное изображение, 640×480 пикселей Результат выделения пятен. Найдено 42 пятна и их центры
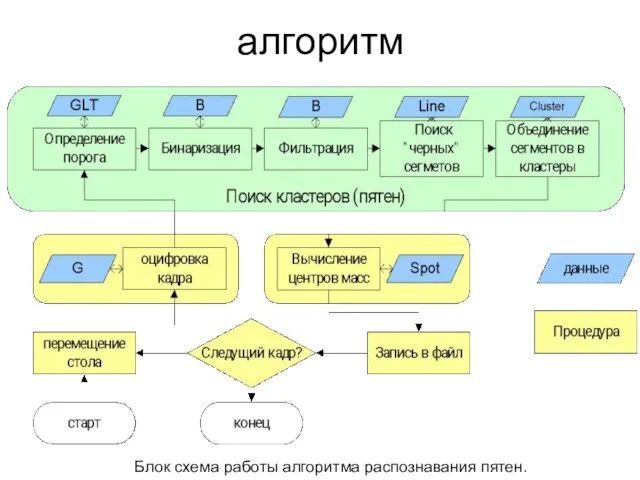
- 14. алгоритм Блок схема работы алгоритма распознавания пятен.
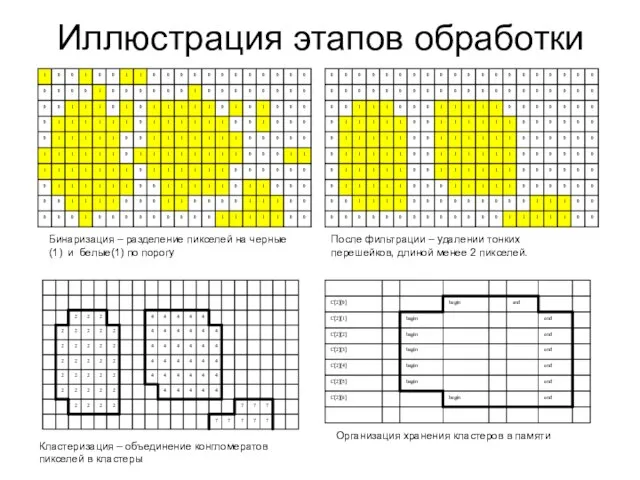
- 15. Иллюстрация этапов обработки Бинаризация – разделение пикселей на черные(1) и белые(1) по порогу После фильтрации –
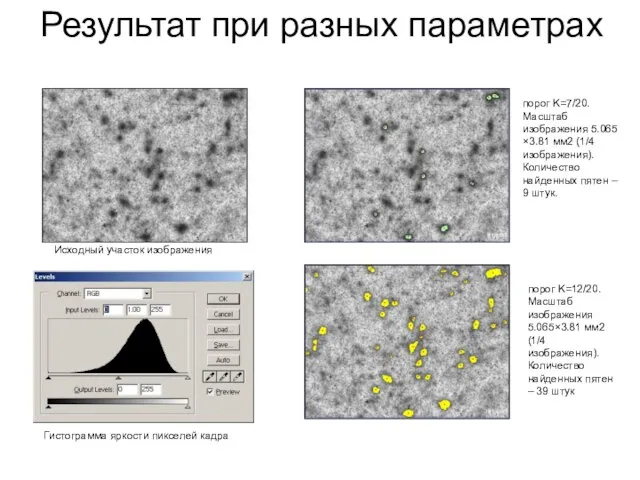
- 16. Результат при разных параметрах Исходный участок изображения порог K=7/20. Масштаб изображения 5.065×3.81 мм2 (1/4 изображения). Количество
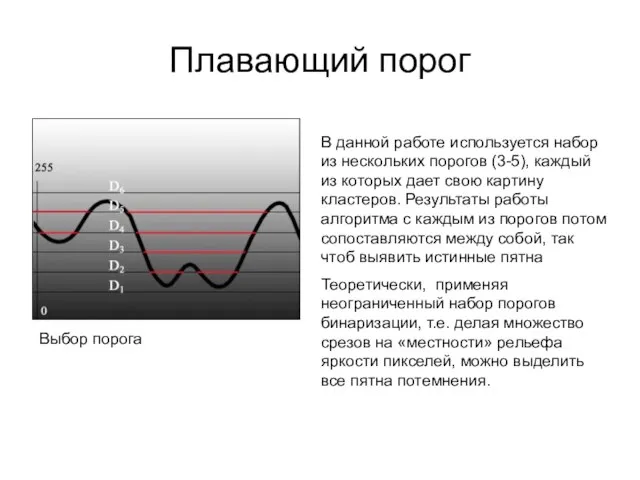
- 17. Плавающий порог Выбор порога В данной работе используется набор из нескольких порогов (3-5), каждый из которых
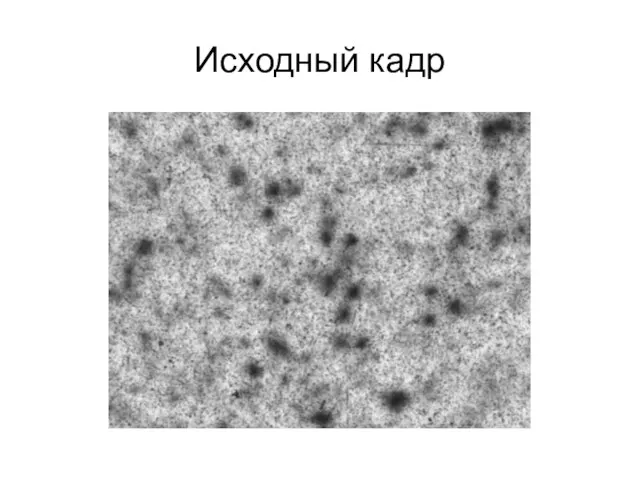
- 18. Исходный кадр
- 19. Результат работы алгоритма выделения пятен, порог K=7/20. Масштаб изображения 5.065×3.81 мм2 (1/4 изображения). Количество найденных пятен
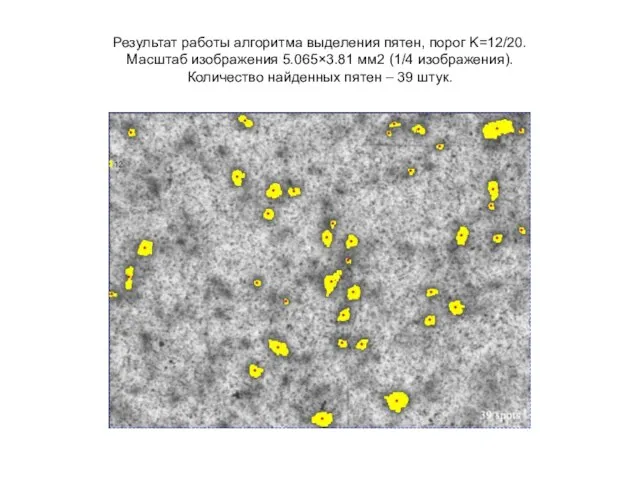
- 20. Результат работы алгоритма выделения пятен, порог K=12/20. Масштаб изображения 5.065×3.81 мм2 (1/4 изображения). Количество найденных пятен
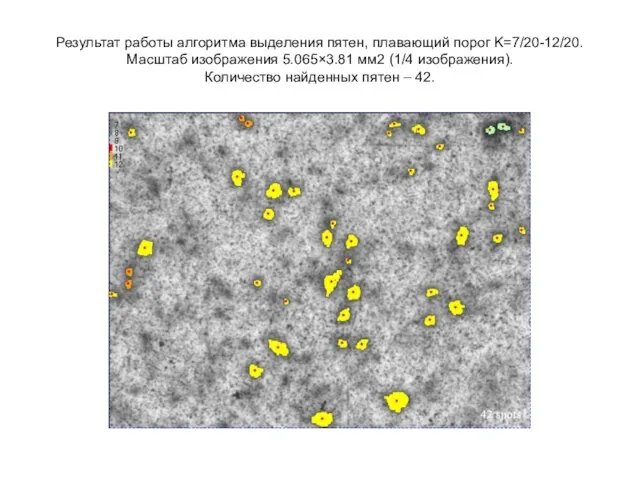
- 21. Результат работы алгоритма выделения пятен, плавающий порог K=7/20-12/20. Масштаб изображения 5.065×3.81 мм2 (1/4 изображения). Количество найденных
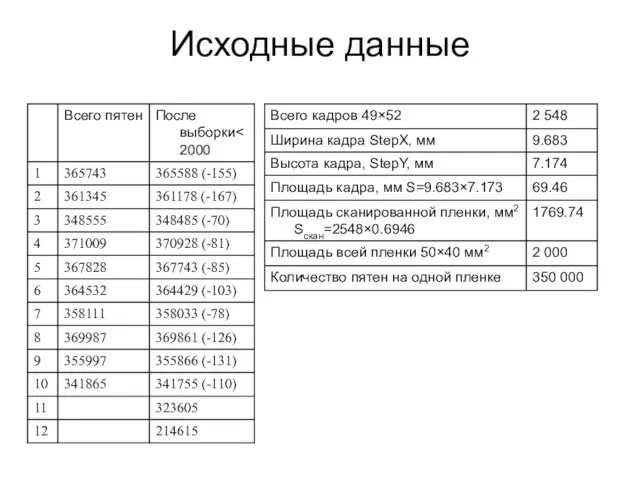
- 22. Исходные данные
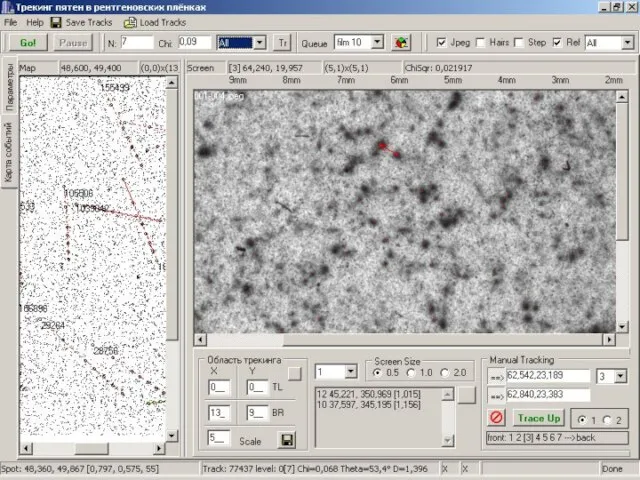
- 23. Блок схема программы трекинг.
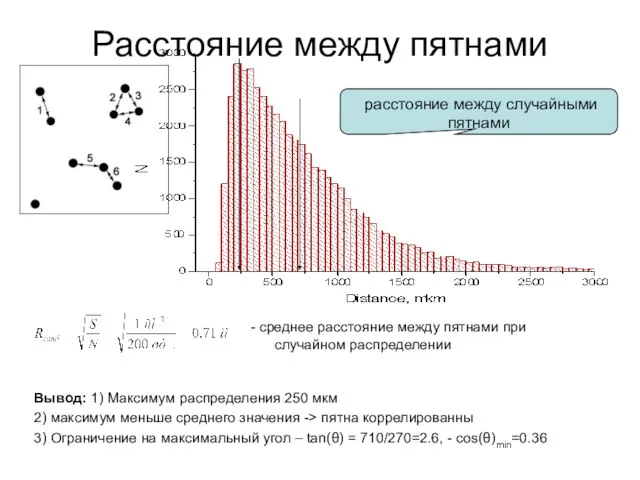
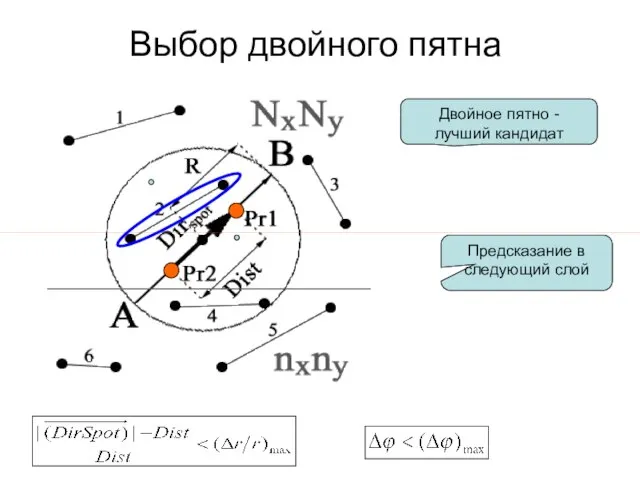
- 25. Расстояние между пятнами - среднее расстояние между пятнами при случайном распределении расстояние между случайными пятнами Вывод:
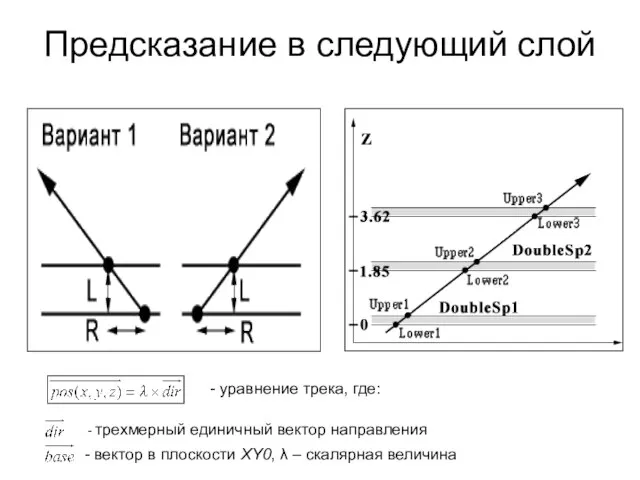
- 26. Предсказание в следующий слой - трехмерный единичный вектор направления - вектор в плоскости XY0, λ –
- 27. Выбор двойного пятна Предсказание в следующий слой Двойное пятно - лучший кандидат
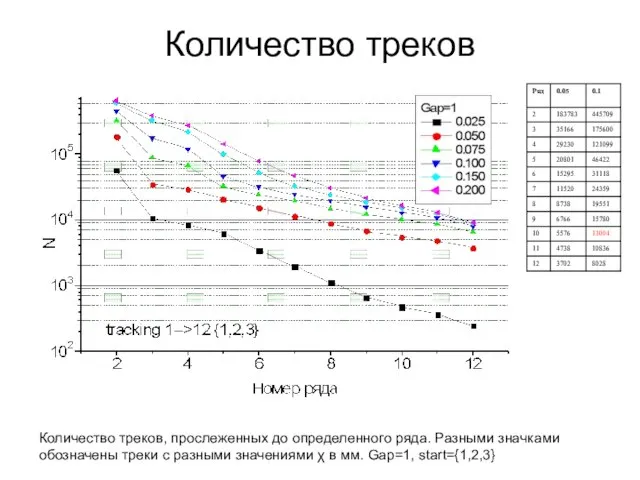
- 28. Количество треков Количество треков, прослеженных до определенного ряда. Разными значками обозначены треки с разными значениями χ
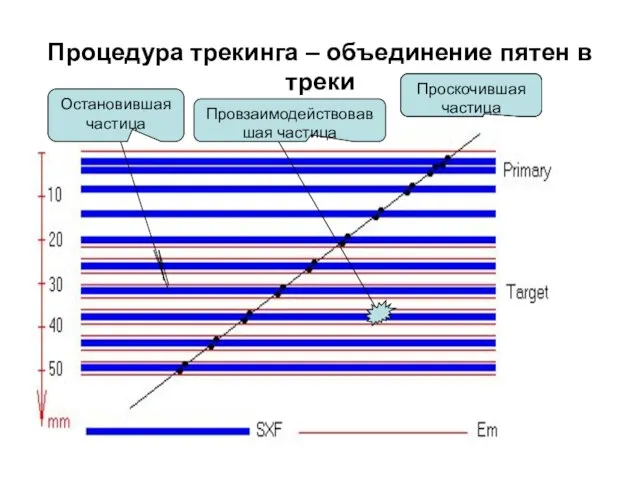
- 29. Процедура трекинга – объединение пятен в треки Проскочившая частица Проскочившая частица Остановившая частица Провзаимодействовавшая частица
- 30. Как тестировали Прямой и обратный трекинг Визуальная проверка Сравнение с расчетами Проверка по эмульсии
- 31. Проверка по эмульсии Во всех 100% случаях были найдены следы в эмульсии по трекам в SXF
- 32. Моделирование прохождение тяжелых ядер через камеру Постановка задачи На границу камеры падает спектр протонов, альфа-частиц, CNO,
- 33. Результаты моделирования треугольники - χ Угловое распределение ВЫВОД: χ ВЫВОД: теряются частицы под малыми углами вследствие
- 34. Прослеживание в эмульсию Мы нашли оборванный трек Предсказали в эмульсию Fe Em SXF Fe Em SXF
- 35. Множественность в Fe+Fe взаим. Число вторичных однозарядных частиц (charged) и фрагментов (fragments) в круге радиуса R,
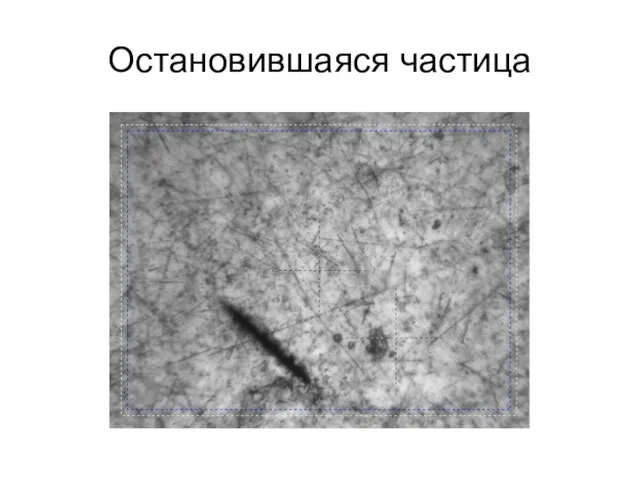
- 36. Остановившаяся частица
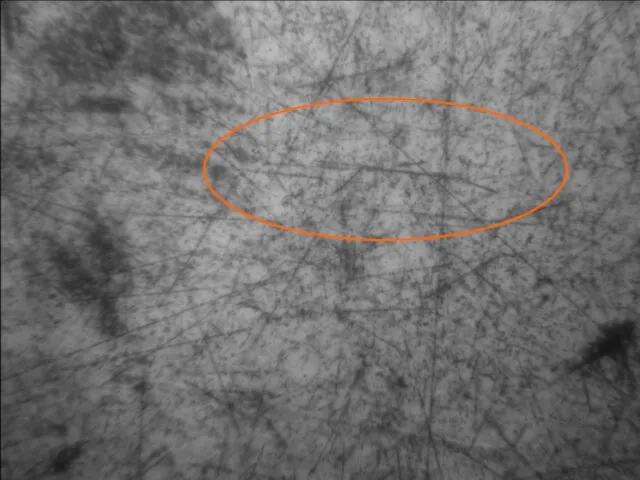
- 37. Потерянный трек
- 40. Скачать презентацию
Слайд 2Эксперимент RUNJOB
Площадь камеры 50см×80см
Высота полета ~32 км (10 г/см2)
Время одного полета ~150
Эксперимент RUNJOB
Площадь камеры 50см×80см
Высота полета ~32 км (10 г/см2)
Время одного полета ~150
Слайд 3Структура камеры
Расположение пленок SXF в камере RUNJOB
Первичный (Primary) и мишенный (Target) блоки
Структура камеры
Расположение пленок SXF в камере RUNJOB
Первичный (Primary) и мишенный (Target) блоки
Слайд 4Алгоритм вершинного триггера
поиск опорных треков, (найдено вручную 12 треков)
«сшивка» камеры, восстановление общей
Алгоритм вершинного триггера
поиск опорных треков, (найдено вручную 12 треков)
«сшивка» камеры, восстановление общей
Слайд 5Пленка SXF
Структура рентгеновской пленки в поперечном сечении, без экранов-сцинтилляторов.
Изображение пленки в микроскопе,
Пленка SXF
Структура рентгеновской пленки в поперечном сечении, без экранов-сцинтилляторов.
Изображение пленки в микроскопе,
Слайд 6Измерительная система
Механически стол MICOS
Оптическая система
Система ввода изображения
Персональный компьютер
Программное обеспечение
Измерительная система
Механически стол MICOS
Оптическая система
Система ввода изображения
Персональный компьютер
Программное обеспечение

Слайд 7Параметры измерительной системы
Прецизионный стол MICOS
диапазон перемещений по осям: 800мм × 400мм ×
Параметры измерительной системы
Прецизионный стол MICOS
диапазон перемещений по осям: 800мм × 400мм ×
Слайд 8Внешний вид установки
Чистая комната
Оптическая система
контроллер
джойстик
Внешний вид установки
Чистая комната
Оптическая система
контроллер
джойстик

Слайд 9Программа сканирования
Управление режимами работы Micos
Перемещение стола в заданную точку по 3 осям
Программа сканирования
Управление режимами работы Micos
Перемещение стола в заданную точку по 3 осям
Слайд 10Параметры сканирования
Параметры сканирования
Слайд 12Пошаговое сканирование
Положение системы координат пленки и системы координат стола Micos.
Показаны отступы
Пошаговое сканирование
Положение системы координат пленки и системы координат стола Micos.
Показаны отступы

Слайд 13Выделение пятен
Исходное изображение,
640×480 пикселей
Результат выделения пятен.
Найдено 42 пятна и их центры
Выделение пятен
Исходное изображение,
640×480 пикселей
Результат выделения пятен.
Найдено 42 пятна и их центры
Слайд 14алгоритм
Блок схема работы алгоритма распознавания пятен.
алгоритм
Блок схема работы алгоритма распознавания пятен.
Слайд 15Иллюстрация этапов обработки
Бинаризация – разделение пикселей на черные(1) и белые(1) по порогу
Иллюстрация этапов обработки
Бинаризация – разделение пикселей на черные(1) и белые(1) по порогу
Слайд 16Результат при разных параметрах
Исходный участок изображения
порог K=7/20.
Масштаб изображения 5.065×3.81 мм2 (1/4
Результат при разных параметрах
Исходный участок изображения
порог K=7/20.
Масштаб изображения 5.065×3.81 мм2 (1/4
Слайд 17Плавающий порог
Выбор порога
В данной работе используется набор из нескольких порогов (3-5),
Плавающий порог
Выбор порога
В данной работе используется набор из нескольких порогов (3-5),
Слайд 18Исходный кадр
Исходный кадр
Слайд 19Результат работы алгоритма выделения пятен, порог K=7/20.
Масштаб изображения 5.065×3.81 мм2 (1/4
Результат работы алгоритма выделения пятен, порог K=7/20. Масштаб изображения 5.065×3.81 мм2 (1/4

Слайд 20Результат работы алгоритма выделения пятен, порог K=12/20.
Масштаб изображения 5.065×3.81 мм2 (1/4
Результат работы алгоритма выделения пятен, порог K=12/20. Масштаб изображения 5.065×3.81 мм2 (1/4
Слайд 21Результат работы алгоритма выделения пятен, плавающий порог K=7/20-12/20.
Масштаб изображения 5.065×3.81 мм2
Результат работы алгоритма выделения пятен, плавающий порог K=7/20-12/20. Масштаб изображения 5.065×3.81 мм2
Слайд 22Исходные данные
Исходные данные
Слайд 23Блок схема программы трекинг.
Блок схема программы трекинг.

Слайд 25Расстояние между пятнами
- среднее расстояние между пятнами при случайном распределении
расстояние между
Расстояние между пятнами
- среднее расстояние между пятнами при случайном распределении
расстояние между
Слайд 26Предсказание в следующий слой
- трехмерный единичный вектор направления
- вектор в
Предсказание в следующий слой
- трехмерный единичный вектор направления
- вектор в
Слайд 27Выбор двойного пятна
Предсказание в следующий слой
Двойное пятно - лучший кандидат
Выбор двойного пятна
Предсказание в следующий слой
Двойное пятно - лучший кандидат
Слайд 28Количество треков
Количество треков, прослеженных до определенного ряда. Разными значками обозначены треки с
Количество треков
Количество треков, прослеженных до определенного ряда. Разными значками обозначены треки с
Слайд 29Процедура трекинга – объединение пятен в треки
Проскочившая
частица
Проскочившая
частица
Остановившая
частица
Провзаимодействовавшая частица
Процедура трекинга – объединение пятен в треки
Проскочившая
частица
Проскочившая
частица
Остановившая
частица
Провзаимодействовавшая частица
Слайд 30Как тестировали
Прямой и обратный трекинг
Визуальная проверка
Сравнение с расчетами
Проверка по эмульсии
Как тестировали
Прямой и обратный трекинг
Визуальная проверка
Сравнение с расчетами
Проверка по эмульсии
Слайд 31Проверка по эмульсии
Во всех 100% случаях были найдены следы в эмульсии по
Проверка по эмульсии
Во всех 100% случаях были найдены следы в эмульсии по

Слайд 32Моделирование прохождение тяжелых ядер через камеру
Постановка задачи
На границу камеры падает спектр протонов,
Моделирование прохождение тяжелых ядер через камеру
Постановка задачи
На границу камеры падает спектр протонов,
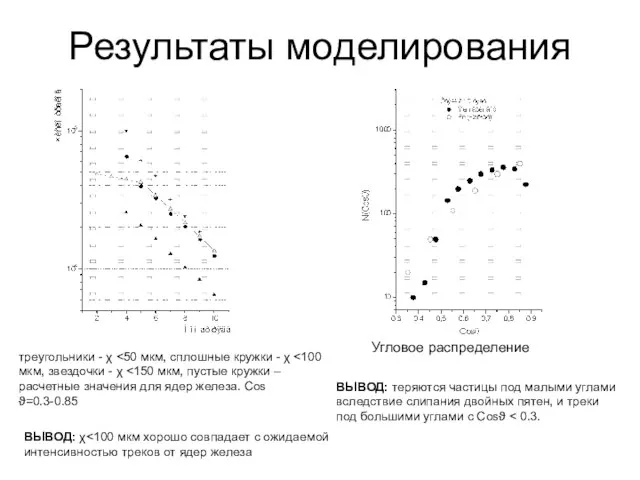
Слайд 33Результаты моделирования
треугольники - χ <50 мкм, сплошные кружки - χ <100 мкм,
Результаты моделирования
треугольники - χ <50 мкм, сплошные кружки - χ <100 мкм,
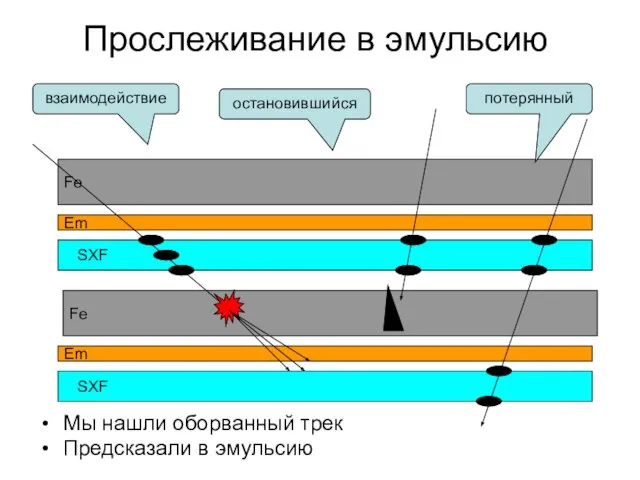
Слайд 34Прослеживание в эмульсию
Мы нашли оборванный трек
Предсказали в эмульсию
Fe
Em
SXF
Fe
Em
SXF
взаимодействие
остановившийся
потерянный
Прослеживание в эмульсию
Мы нашли оборванный трек
Предсказали в эмульсию
Fe
Em
SXF
Fe
Em
SXF
взаимодействие
остановившийся
потерянный
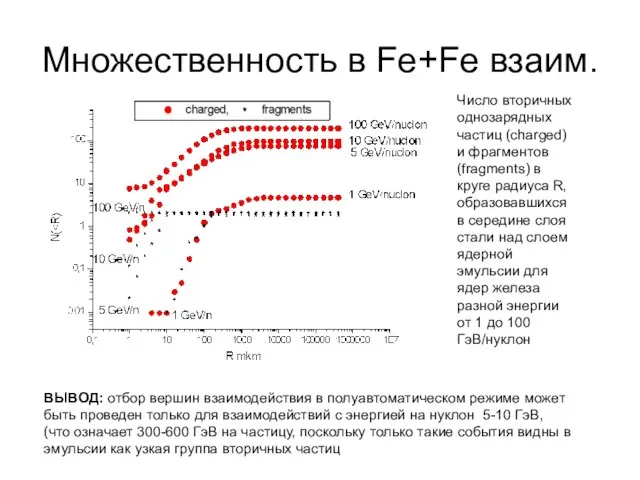
Слайд 35Множественность в Fe+Fe взаим.
Число вторичных однозарядных частиц (charged) и фрагментов (fragments) в
Множественность в Fe+Fe взаим.
Число вторичных однозарядных частиц (charged) и фрагментов (fragments) в
Слайд 36Остановившаяся частица
Остановившаяся частица
Слайд 37Потерянный трек
Потерянный трек

 Презентация на тему Спасители Отечества. Конец Смуты
Презентация на тему Спасители Отечества. Конец Смуты  Восстание Уота Тайлера в Англии
Восстание Уота Тайлера в Англии Курсовая работа слушателя курсов повышения квалификации «Информационные технологии в деятельности учителя- предметника» Гав
Курсовая работа слушателя курсов повышения квалификации «Информационные технологии в деятельности учителя- предметника» Гав Организация учебно – исследовательской деятельности в школе
Организация учебно – исследовательской деятельности в школе Развитие агропромышленного и рыбохозяйственного комплексов Вологодской области. Объем государственной поддержки
Развитие агропромышленного и рыбохозяйственного комплексов Вологодской области. Объем государственной поддержки Царскосельский пушкинский лицей (викторина)
Царскосельский пушкинский лицей (викторина) Устный счёт «Деление на двузначное число»
Устный счёт «Деление на двузначное число» Международный трибунал по морскому праву
Международный трибунал по морскому праву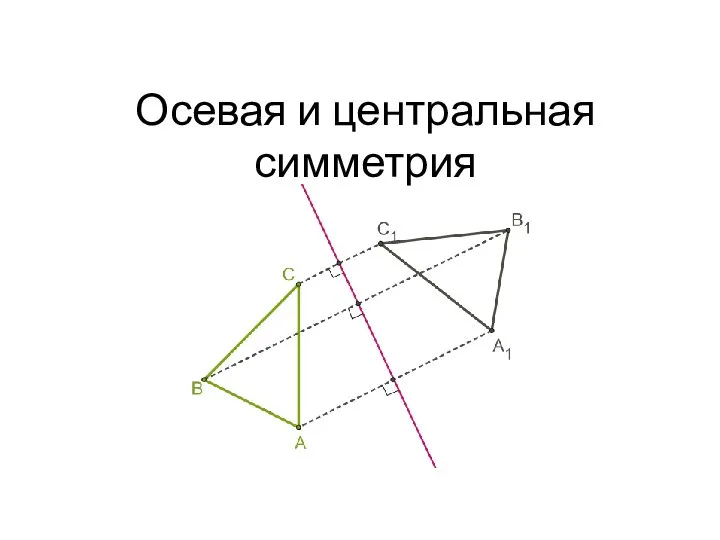 Осевая и центральная симметрия
Осевая и центральная симметрия РАЗВИТИЕ КСО ЧЕРЕЗ ПРЕПОДАВАНИЕ В УНИВЕРСИТЕТАХ КИШИНЕВ, 30 ОКТЯБРЯ МАРИНА САПРЫКИНА, ЦЕНТР РАЗВИТИЯ КСО
РАЗВИТИЕ КСО ЧЕРЕЗ ПРЕПОДАВАНИЕ В УНИВЕРСИТЕТАХ КИШИНЕВ, 30 ОКТЯБРЯ МАРИНА САПРЫКИНА, ЦЕНТР РАЗВИТИЯ КСО Белоруссия
Белоруссия ВКР: Бухгалтерский учет и анализ оплаты труда на предприятии
ВКР: Бухгалтерский учет и анализ оплаты труда на предприятии Имущество
Имущество Презентация для дипломной работы
Презентация для дипломной работы Презентация на тему Законы Кеплера законы движения небесных тел
Презентация на тему Законы Кеплера законы движения небесных тел  Интеграция информационных систем:состояние, тенденции, перспективы
Интеграция информационных систем:состояние, тенденции, перспективы Всемирный банк Программа Интернет-услуг
Всемирный банк Программа Интернет-услуг Салейкинская сельская библиотека
Салейкинская сельская библиотека Современные средства поражения
Современные средства поражения Ya_kontseptsia_Ya_ustal
Ya_kontseptsia_Ya_ustal Дикие животные тропиков
Дикие животные тропиков Урок презентация на тему Борис Заходер «История гусеницы»
Урок презентация на тему Борис Заходер «История гусеницы»  Дом приведение. Школьник. Детская газета. Выпуск 2
Дом приведение. Школьник. Детская газета. Выпуск 2 ИТОГИ ПЕРВОГО ТРИМЕСТРА
ИТОГИ ПЕРВОГО ТРИМЕСТРА ВГПУ, встреча с абитуриентами - 18
ВГПУ, встреча с абитуриентами - 18 Предоставление заявки на сертификацию СМК
Предоставление заявки на сертификацию СМК Тефлон
Тефлон Проблемыметодического обеспечения учебных дисциплин в контексте ФГОС нового поколения
Проблемыметодического обеспечения учебных дисциплин в контексте ФГОС нового поколения