- МИКРО БЕСПИЛОТНЫЙЛЕТАТЕЛЬНЫЙ АППАРАТМОДЕЛЬ АТ–1 ”ПОЛЕВОЙ ЖАВОРОНОК”

Содержание
- 2. АТ–1 ”ПОЛЕВОЙ ЖАВОРОНОК” Модель имеет хороший планер и прекрасные аэродинамические характеристики. Отлично ведет себя и при
- 3. Технические характеристики: АТ-1 Размах крыла----------------- 3,000 m Длина--------------------------- 1,400 m Вес без аппаратуры ----- 1,200 kg
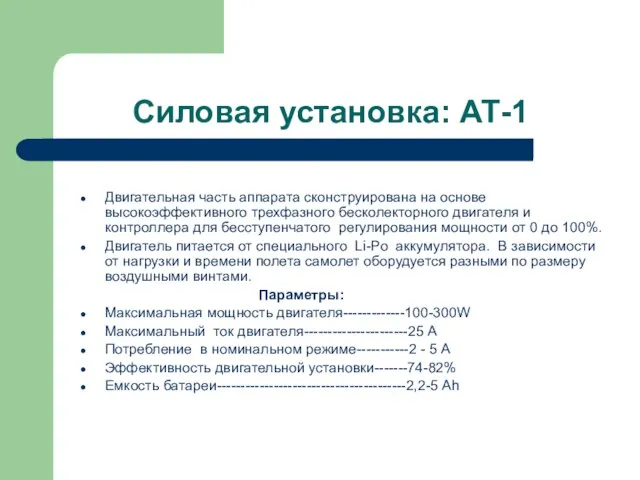
- 4. Силовая установка: АТ-1 Двигательная часть аппарата сконструирована на основе высокоэффективного трехфазного бесколекторного двигателя и контроллера для
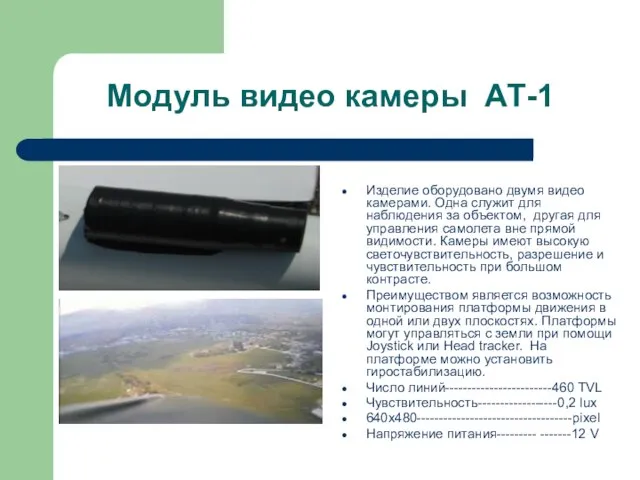
- 5. Модуль видео камеры АТ-1 Изделие оборудовано двумя видео камерами. Одна служит для наблюдения за объектом, другая
- 6. Модуль Head Trackеr с видео дисплеем Модуль используется для наблюдения в реальном времени с помощью камеры,
- 7. Модуль: Сенсор с Автопилотом IMU /Inertial measurement unit/ Модуль является основным средством управления беспилотного аппарата. Имеет
- 8. Модуль: Сенсор с Автопилотом IMU /Inertial measurement unit/ Гироскоп 3DOF Акселерометр 3DОF Компас 3DО Альтиметр Вариометр
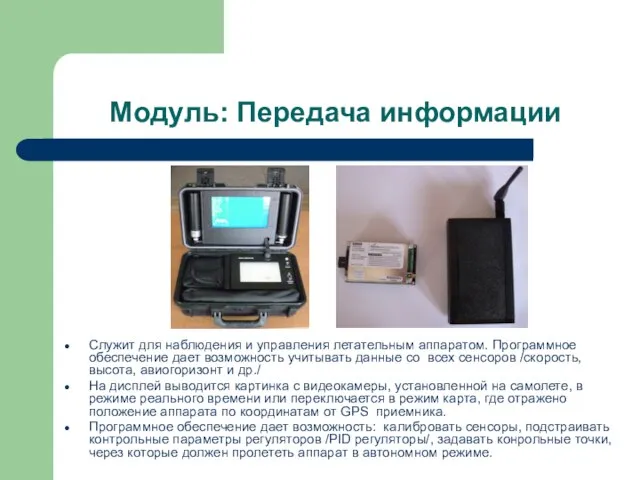
- 9. Модуль: Передача информации Служит для наблюдения и управления летательным аппаратом. Программное обеспечение дает возможность учитывать данные
- 11. Скачать презентацию
Слайд 2АТ–1 ”ПОЛЕВОЙ ЖАВОРОНОК”
Модель имеет хороший планер и прекрасные аэродинамические характеристики. Отлично ведет
АТ–1 ”ПОЛЕВОЙ ЖАВОРОНОК”
Модель имеет хороший планер и прекрасные аэродинамические характеристики. Отлично ведет
Слайд 3Технические характеристики: АТ-1
Размах крыла----------------- 3,000 m
Длина--------------------------- 1,400 m
Вес без аппаратуры ----- 1,200
Технические характеристики: АТ-1
Размах крыла----------------- 3,000 m
Длина--------------------------- 1,400 m
Вес без аппаратуры ----- 1,200

Слайд 4Силовая установка: АТ-1
Двигательная часть аппарата сконструирована на основе высокоэффективного трехфазного бесколекторного
Силовая установка: АТ-1
Двигательная часть аппарата сконструирована на основе высокоэффективного трехфазного бесколекторного
Слайд 5Модуль видео камеры АТ-1
Изделие оборудовано двумя видео камерами. Одна служит для
Модуль видео камеры АТ-1
Изделие оборудовано двумя видео камерами. Одна служит для
Слайд 6Модуль Head Trackеr с видео дисплеем
Модуль используется для наблюдения в реальном
Модуль Head Trackеr с видео дисплеем
Модуль используется для наблюдения в реальном

Слайд 7Модуль: Сенсор с Автопилотом
IMU /Inertial measurement unit/
Модуль является основным средством управления
Модуль: Сенсор с Автопилотом
IMU /Inertial measurement unit/
Модуль является основным средством управления

Слайд 8 Модуль: Сенсор с Автопилотом
IMU /Inertial measurement unit/
Гироскоп 3DOF
Акселерометр 3DОF
Компас 3DО
Альтиметр
Вариометр
Скоростемер
Альтиметр
Модуль: Сенсор с Автопилотом
IMU /Inertial measurement unit/
Гироскоп 3DOF
Акселерометр 3DОF
Компас 3DО
Альтиметр
Вариометр
Скоростемер
Альтиметр
Слайд 9 Модуль: Передача информации
Служит для наблюдения и управления летательным аппаратом. Программное обеспечение
Модуль: Передача информации
Служит для наблюдения и управления летательным аппаратом. Программное обеспечение
 Использование ИКТ в образовательном процессе как способ оптимизации деятельности учителя
Использование ИКТ в образовательном процессе как способ оптимизации деятельности учителя Психология зависимого поведения
Психология зависимого поведения ПРЕЗЕНТАЦИЯ МОИХ РАБОТ«ВРЕМЕНА ГОДА»
ПРЕЗЕНТАЦИЯ МОИХ РАБОТ«ВРЕМЕНА ГОДА» Рак почки. Эпидемиология, классификация, этиология, патогенез, клиническая картина
Рак почки. Эпидемиология, классификация, этиология, патогенез, клиническая картина Dmitry Sergeyevich Likhachov
Dmitry Sergeyevich Likhachov Вопрос о правде в драме М.Горького «На дне».
Вопрос о правде в драме М.Горького «На дне». Информационно-справочная система Предприятие средств диспетчерского и технологического управления РУП Гродноэнерго
Информационно-справочная система Предприятие средств диспетчерского и технологического управления РУП Гродноэнерго Презентация на тему Албания
Презентация на тему Албания  Мониторинг и оценкав деятельности НКО
Мониторинг и оценкав деятельности НКО Научно-методические основы корректировочного курса по русскому языку как неродному(глагольное предложное управление в азербай
Научно-методические основы корректировочного курса по русскому языку как неродному(глагольное предложное управление в азербай Педагогический meet-up Начать легко
Педагогический meet-up Начать легко Наше Сердце.
Наше Сердце. Презентация на тему ОЛИМПИАДА 2014 г. СОЧИ
Презентация на тему ОЛИМПИАДА 2014 г. СОЧИ  Соединение деталей шурупами
Соединение деталей шурупами Подготовка документов для создания организации
Подготовка документов для создания организации Фундаментальные и прикладные вопросы нейробиологии
Фундаментальные и прикладные вопросы нейробиологии Литература Древнего Египта
Литература Древнего Египта ТЕХНИЧЕСКОЕ ЗАДАНИЕ
ТЕХНИЧЕСКОЕ ЗАДАНИЕ Презентация на тему Жизненный цикл клетки. Митоз. Амитоз
Презентация на тему Жизненный цикл клетки. Митоз. Амитоз Мир художественной культуры эпохи Возрождения
Мир художественной культуры эпохи Возрождения Сервис 1С-Товары
Сервис 1С-Товары House
House Этиология и распространенность наркологических заболеваний
Этиология и распространенность наркологических заболеваний Ноябрь 18 - соок-ирей кырган-ачавыстыӊ төрүттүнген хүнү болур, уруглар
Ноябрь 18 - соок-ирей кырган-ачавыстыӊ төрүттүнген хүнү болур, уруглар Экипаж. Отечественное кино
Экипаж. Отечественное кино Л.С. Выготский о законах личностного развития
Л.С. Выготский о законах личностного развития Find 1 word for 3 pictures
Find 1 word for 3 pictures 01.09.20121 3 «ПОСЛЕДНИЙ ДЕНЬ ПЕРЕД РОЖДЕСТВОМ ПРОШЁЛ.ЗИМНЯЯ, ЯСНАЯ НОЧЬ НАСТУПИЛА. ГЛЯНУЛИ ЗВЁЗДЫ.»
01.09.20121 3 «ПОСЛЕДНИЙ ДЕНЬ ПЕРЕД РОЖДЕСТВОМ ПРОШЁЛ.ЗИМНЯЯ, ЯСНАЯ НОЧЬ НАСТУПИЛА. ГЛЯНУЛИ ЗВЁЗДЫ.»