- МикроконтроллерыЗнакомство с микроконтроллерами и интегральной схемотехникой

Содержание
- 2. Содержание курса Обучение программированию на языке Си Расширенная элементная база. Новые практические навыки (например, обжимка проводов)
- 3. Микроконтроллер – это компьютер на одной микросхеме. Микропроцессор FLASH-память Таймеры Связь с другими устройствами И многое
- 4. Микроконтроллер будет действовать по программе, которую напишете для него вы сами. Программирование
- 5. Входы и выходы микроконтроллера Входы Выходы фоторезисторы кнопки микрофоны динамики светодиоды двигатели
- 6. Новые элементы Конденсаторы Стабилизаторы Интегральные схемы SMD-компоненты =
- 7. Сравним две платы Плата с дискретными элементами Плата с микроконтроллером
- 8. Внешне они похожи И тот, и другой двигается по линии. В чём же отличие?
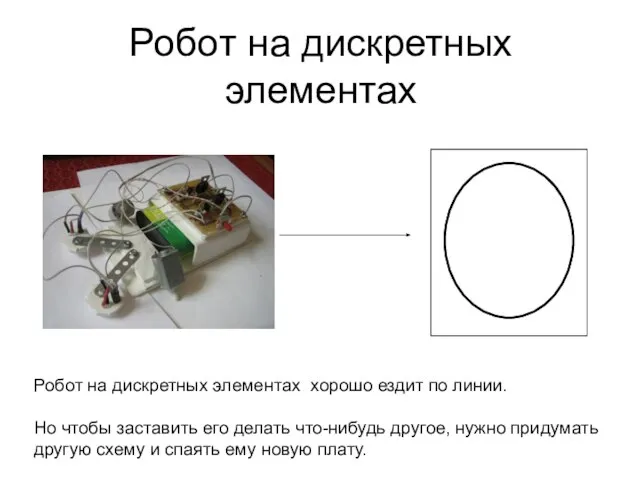
- 9. Робот на дискретных элементах Робот на дискретных элементах хорошо ездит по линии. Но чтобы заставить его
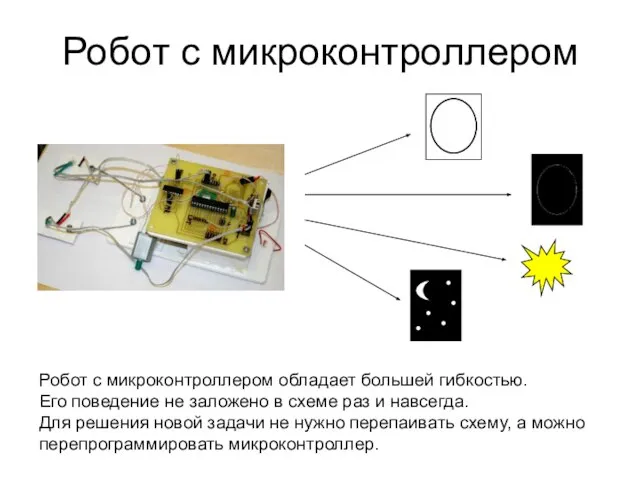
- 10. Робот с микроконтроллером обладает большей гибкостью. Его поведение не заложено в схеме раз и навсегда. Для
- 11. Роботы на микроконтроллерах
- 12. Робот «Зенон» Микроконтроллер AT Mega 8 Исследовательский робот, предназначенный для изучения моделей поведения
- 13. Робот ПЛУТ-3 Микроконтроллеры AT Mega 48 Спортивный робот, участвовавший в соревнованиях «Евробот»
- 14. Система управления роботом Антропоморфный орган управления роботом ПЛУТ-3
- 15. Шагающий шестиногий робот Микроконтроллер AT Mega 8 Исследовательский прототип шагающего робота
- 17. Скачать презентацию
Слайд 2Содержание курса
Обучение программированию на языке Си
Расширенная элементная база.
Новые практические навыки (например,
Содержание курса
Обучение программированию на языке Си
Расширенная элементная база.
Новые практические навыки (например,
Слайд 3Микроконтроллер – это компьютер на одной микросхеме.
Микропроцессор
FLASH-память
Таймеры
Связь с другими устройствами
И многое другое
Микроконтроллер – это компьютер на одной микросхеме.
Микропроцессор
FLASH-память
Таймеры
Связь с другими устройствами
И многое другое

Слайд 4Микроконтроллер будет действовать по программе, которую напишете для него вы сами.
Программирование
Микроконтроллер будет действовать по программе, которую напишете для него вы сами.
Программирование
Слайд 5Входы и выходы микроконтроллера
Входы
Выходы
фоторезисторы
кнопки
микрофоны
динамики
светодиоды
двигатели
Входы и выходы микроконтроллера
Входы
Выходы
фоторезисторы
кнопки
микрофоны
динамики
светодиоды
двигатели

Слайд 6Новые элементы
Конденсаторы
Стабилизаторы
Интегральные схемы
SMD-компоненты
=
Новые элементы
Конденсаторы
Стабилизаторы
Интегральные схемы
SMD-компоненты
=

Слайд 7Сравним две платы
Плата с дискретными элементами
Плата с микроконтроллером
Сравним две платы
Плата с дискретными элементами
Плата с микроконтроллером

Слайд 8Внешне они похожи
И тот, и другой двигается по линии. В чём же
Внешне они похожи
И тот, и другой двигается по линии. В чём же

Слайд 9Робот на дискретных элементах
Робот на дискретных элементах хорошо ездит по линии.
Но
Робот на дискретных элементах
Робот на дискретных элементах хорошо ездит по линии.
Но
Слайд 10Робот с микроконтроллером обладает большей гибкостью.
Его поведение не заложено в схеме
Робот с микроконтроллером обладает большей гибкостью.
Его поведение не заложено в схеме
Слайд 11Роботы на микроконтроллерах
Роботы на микроконтроллерах

Слайд 12Робот «Зенон»
Микроконтроллер
AT Mega 8
Исследовательский робот,
предназначенный для изучения
моделей поведения
Робот «Зенон»
Микроконтроллер
AT Mega 8
Исследовательский робот,
предназначенный для изучения
моделей поведения

Слайд 13Робот ПЛУТ-3
Микроконтроллеры
AT Mega 48
Спортивный робот, участвовавший
в соревнованиях «Евробот»
Робот ПЛУТ-3
Микроконтроллеры
AT Mega 48
Спортивный робот, участвовавший
в соревнованиях «Евробот»

Слайд 14Система управления роботом
Антропоморфный
орган управления
роботом ПЛУТ-3
Система управления роботом
Антропоморфный
орган управления
роботом ПЛУТ-3

Слайд 15Шагающий шестиногий робот
Микроконтроллер
AT Mega 8
Исследовательский прототип шагающего робота
Шагающий шестиногий робот
Микроконтроллер
AT Mega 8
Исследовательский прототип шагающего робота

 «1С:Предприятие 8. 1С-Рейтинг: Учет родительской оплаты и питания в детских учреждениях»
«1С:Предприятие 8. 1С-Рейтинг: Учет родительской оплаты и питания в детских учреждениях» Бразилия
Бразилия Технические средства персонального компьютера.
Технические средства персонального компьютера. Сегодня день космонавтики
Сегодня день космонавтики PR в интернет Необходимые компетенции PR-специалиста Артем Герасимович, it-job.by, LSPR Minsk
PR в интернет Необходимые компетенции PR-специалиста Артем Герасимович, it-job.by, LSPR Minsk Экологическая опасность бытового мусора.
Экологическая опасность бытового мусора. Станция вычислительная
Станция вычислительная ПредложениеПовторение и проверка изученного материала
ПредложениеПовторение и проверка изученного материала Электронная презентация “ Мамин день 8 Марта “
Электронная презентация “ Мамин день 8 Марта “ «Их идейность, благородное честолюбие,… непобедимое стремление к раз намеченной цели, богатство знаний и трудолюбие, привычк
«Их идейность, благородное честолюбие,… непобедимое стремление к раз намеченной цели, богатство знаний и трудолюбие, привычк ЗАНИМАТЕЛЬНЫЕ ЗАДАЧИ ДЛЯ ДОШКОЛЬНИКОВ
ЗАНИМАТЕЛЬНЫЕ ЗАДАЧИ ДЛЯ ДОШКОЛЬНИКОВ Особенности социальных конфликтов в приходе Русской Православной Церкви
Особенности социальных конфликтов в приходе Русской Православной Церкви Поэма Лермонтова Демон в картинах Михаила Врубеля
Поэма Лермонтова Демон в картинах Михаила Врубеля От пальцев до калькулятора
От пальцев до калькулятора Без праздника не бывает детства
Без праздника не бывает детства Столицы Прикамья
Столицы Прикамья Passato prossimo preposizioni articolate. Lezione 13
Passato prossimo preposizioni articolate. Lezione 13 1завдання
1завдання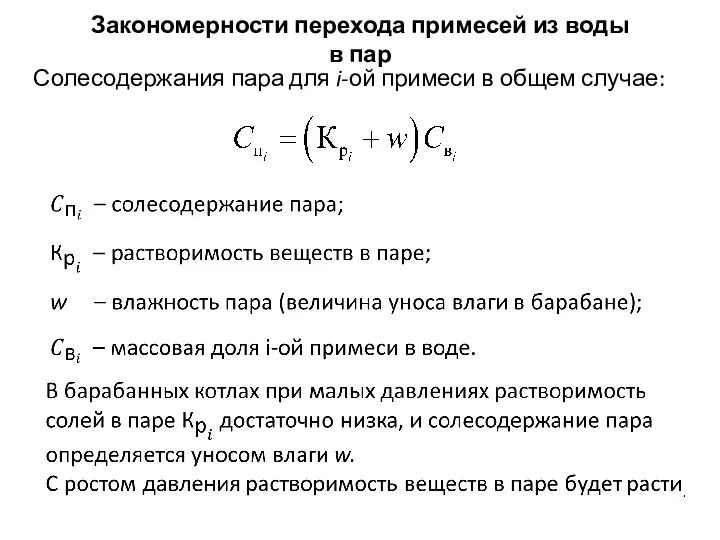 Закономерности перехода примесей из воды в пар
Закономерности перехода примесей из воды в пар Круг чтения
Круг чтения Тенденции развития маркетинга в Украине, 2008 - 2011 Результаты 6-й волны регулярного опроса маркетологов Украины
Тенденции развития маркетинга в Украине, 2008 - 2011 Результаты 6-й волны регулярного опроса маркетологов Украины Презентация на тему Курение
Презентация на тему Курение  Внутренняя среда организации
Внутренняя среда организации Презентация на тему Определение (5 класс)
Презентация на тему Определение (5 класс) Грибной эльф. Серия грибных чаев
Грибной эльф. Серия грибных чаев Зіставна лінгвістика як наука і навчальна дисципліна
Зіставна лінгвістика як наука і навчальна дисципліна Масленица. История и традиции
Масленица. История и традиции Ориентирование
Ориентирование