- Модуль индивидуального управления. ТПТС55.1673

Содержание
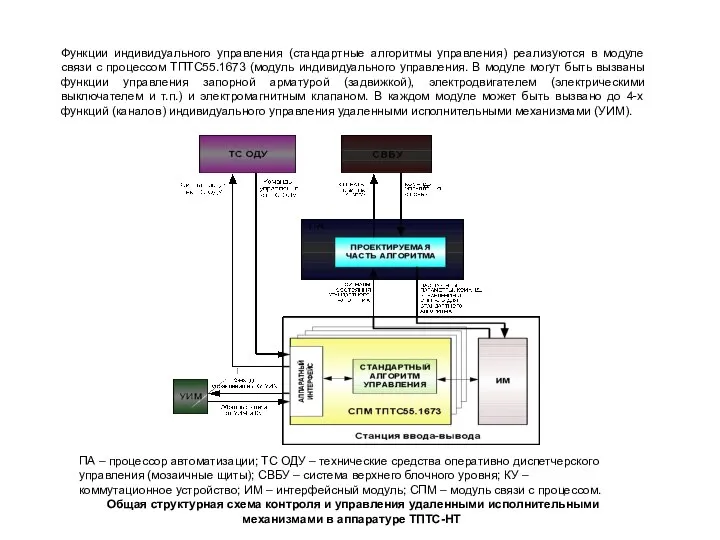
- 2. Функции индивидуального управления (стандартные алгоритмы управления) реализуются в модуле связи с процессом ТПТС55.1673 (модуль индивидуального управления.
- 3. 1 – ручки для удобства установки и изъятия модуля из крейта; 5 – светодиод«24V» (зеленый); 2
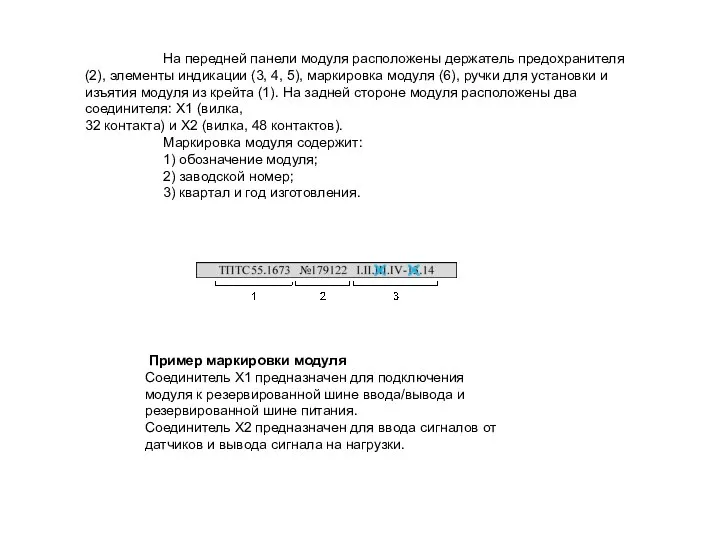
- 4. На передней панели модуля расположены держатель предохранителя (2), элементы индикации (3, 4, 5), маркировка модуля (6),
- 5. Функция индивидуального управления Функции индивидуального управления исполнительными механизмами реализуются с помощью программных модулей, имеющих общее условное
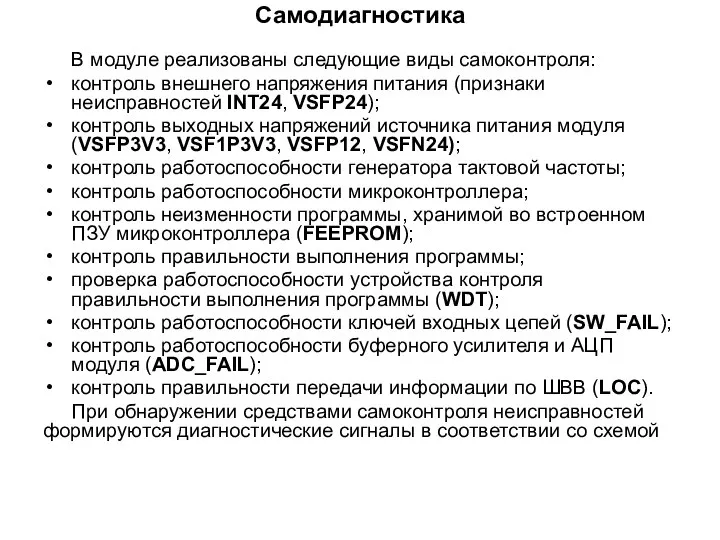
- 6. Самодиагностика В модуле реализованы следующие виды самоконтроля: контроль внешнего напряжения питания (признаки неисправностей INT24, VSFP24); контроль
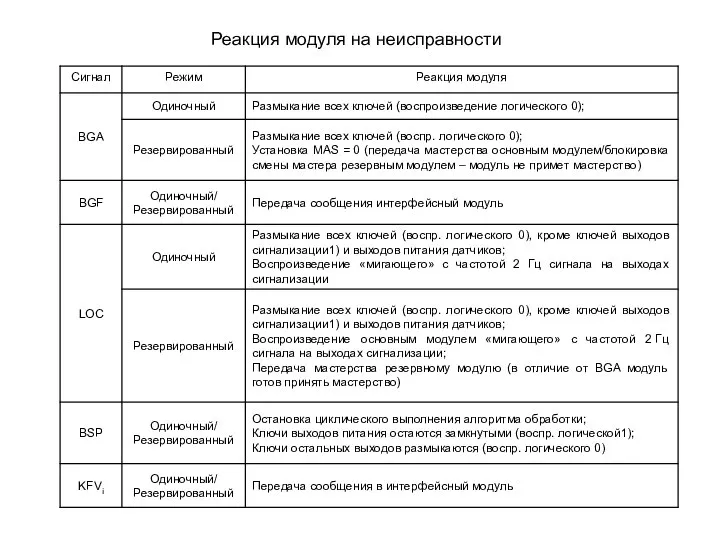
- 7. Реакция модуля на неисправности
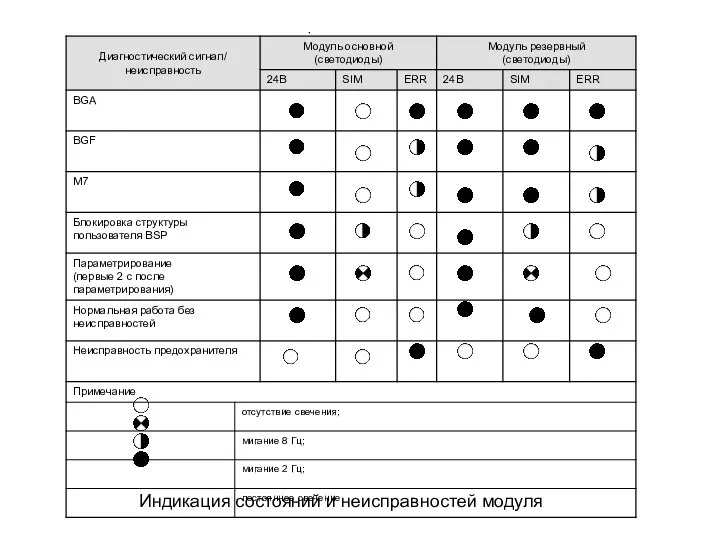
- 8. Индикация состояний и неисправностей модуля
- 9. Работа в резервированном режиме В резервированном режиме работы один из модулей является основным, его выходы воспроизводят
- 10. Функция управления электромотором ESG М Входные сигналы обрабатываются функцией в соответствии с логикой. По результатам логической
- 11. Средствами логики устанавливаются следующие приоритеты команд: защитные команды ОТКЛ (SA1, FSA1, UA, SA2) – высший приоритет;
- 12. Защитные команды включения/отключения исполняются без сигналов разрешения. Сигнал S1A («Защитное отключение высшего приоритета" – или "Защита
- 13. Тестирование агрегата (вход FTE) Через вход FTE модулю сообщается, что коммутируемая установка находится в тестовом состоянии,
- 14. Снижение силового напряжения питания электродвигателя Если необходимо, то внешними средствами может контролироваться напряжение питания электродвигателя. Эти
- 15. Режимы выходных команд Запоминание команды Входные команды записываются в буферы команд в зависимости от входов SH,
- 16. Режим с запоминанием команды в командном буфере, для пускателя с самоподхватом команды ("короткая" выходная команда от
- 17. Режим с запоминанием команды в командном буфере, для пускателя без самоподхвата команды ("висящая" выходная команда от
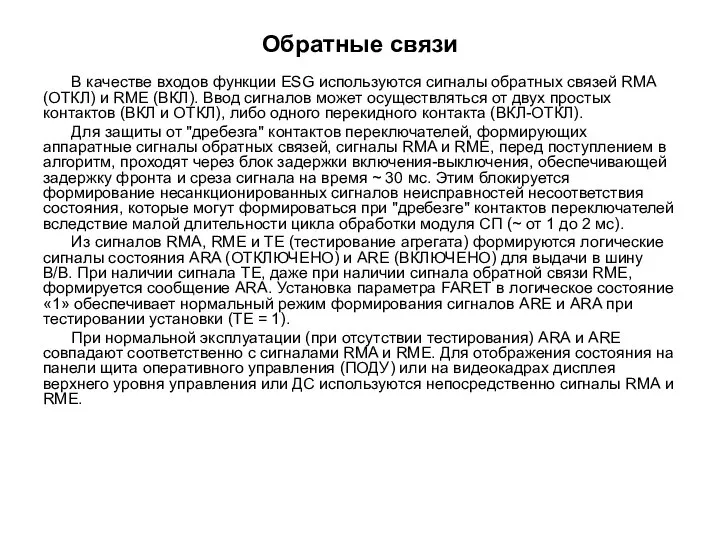
- 18. Обратные связи В качестве входов функции ESG используются сигналы обратных связей RMA (ОТКЛ) и RME (ВКЛ).
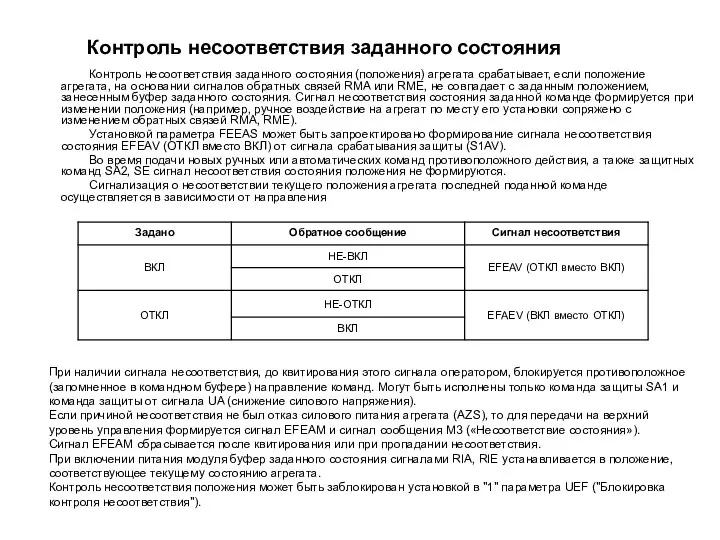
- 19. Контроль несоответствия заданного состояния Контроль несоответствия заданного состояния (положения) агрегата срабатывает, если положение агрегата, на основании
- 20. Срабатывание защиты Если при наличии обратного сигнала RME поступает команда защиты агрегата SA1, то формируется сигнал
- 21. Контроль времени исполнения команды Контроль времени исполнения команды срабатывает, когда время между выдачей команды (на выходе
- 22. Квитирование неисправностей Сигналы неисправностей EFEAV, EFAEV, S1AV, LZAV и LZEV должны быть квитированы оператором. Квитирование осуществляется
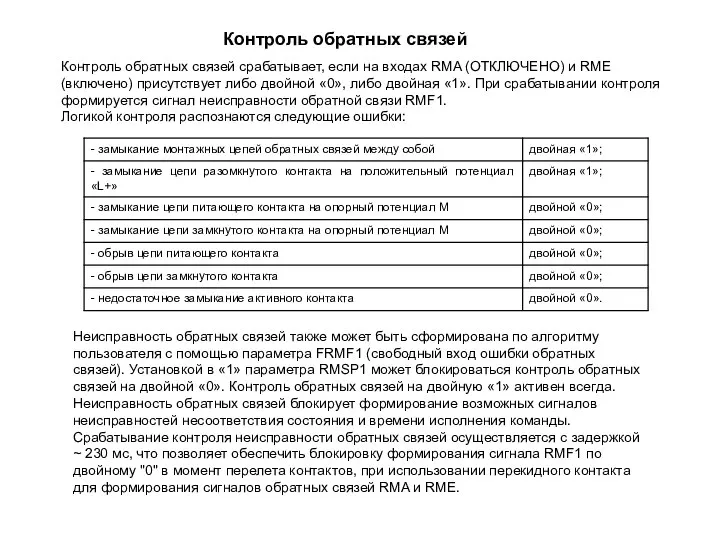
- 23. Контроль обратных связей Контроль обратных связей срабатывает, если на входах RMA (ОТКЛЮЧЕНО) и RME (включено) присутствует
- 24. Контроль блокировки команд Контроль блокировки срабатывает, когда команда не может выполняться, потому что: на входах ручных,
- 25. Отказ электрических силовых цепей питания привода Через вход AZS сигнализируется отказ в электрических цепях электропривода задвижки.
- 26. Квитирование мигающей сигнализации при разборке электрической схемы управления арматурой Разборка электрической схемы управления арматурой производится принудительным
- 27. Коммутирующая установка в состоянии теста Через вход ТЕ в модуль может поступать сообщение о том, что
- 28. Управление задвижками, имеющими особенности в своем функционировании Адаптация алгоритма к управлению арматурой с одной моментной муфтой
- 29. Адаптация алгоритма к управлению арматурой с кратковременным срабатыванием моментной муфты в начале хода из любого положения
- 30. Адаптация алгоритма к схеме управления арматурой с уплотнением по токовому реле В практике встречаются арматуры, уплотнение
- 31. Если требуется блокировать срабатывания токового реле, связанные с кратковременными превышениями крутящего момента в процессе хода в
- 32. Адаптация алгоритма к управлению арматурой с сигналами от концевых выключателей WENZU (не-закр) и WENAF (не-откр) Как
- 33. Адаптация алгоритма к управлению арматурой с сигналами от датчиков моментных муфт DEZU (закр) и DEAF (откр)
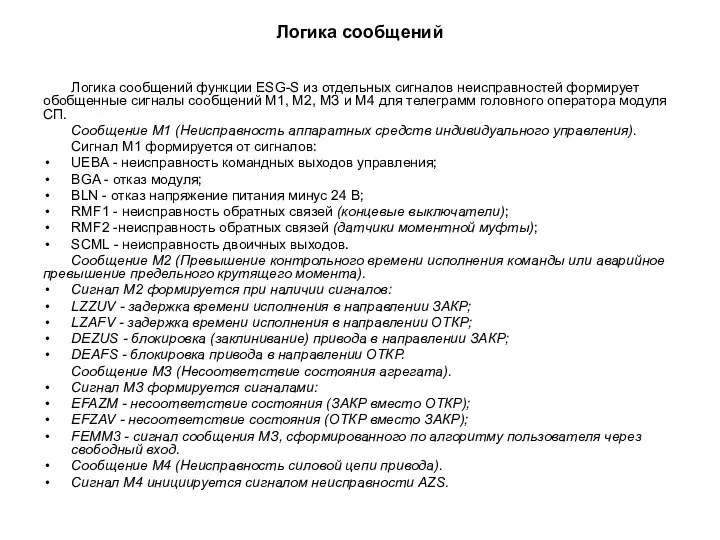
- 34. Логика сообщений Логика сообщений функции ESG-S из отдельных сигналов неисправностей формирует обобщенные сигналы сообщений М1, М2,
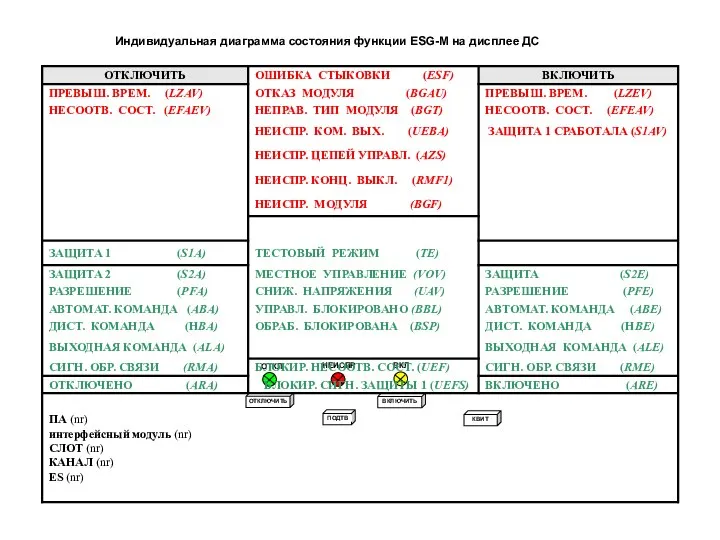
- 35. Индивидуальная диаграмма состояния функции ESG-M на дисплее ДС
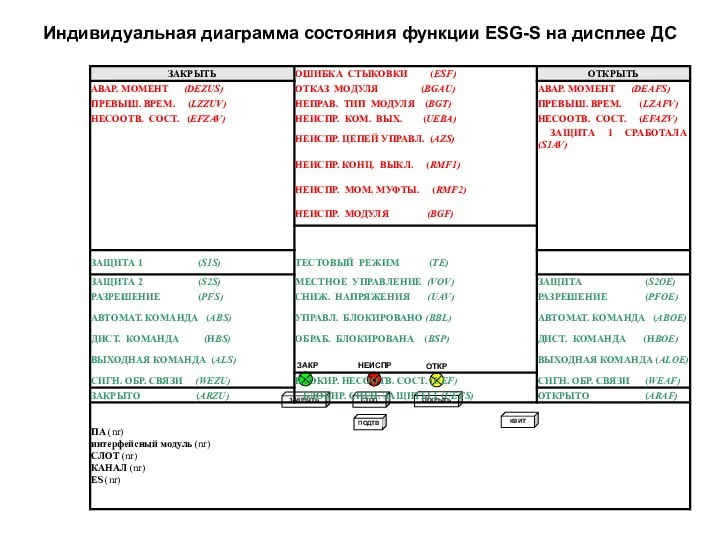
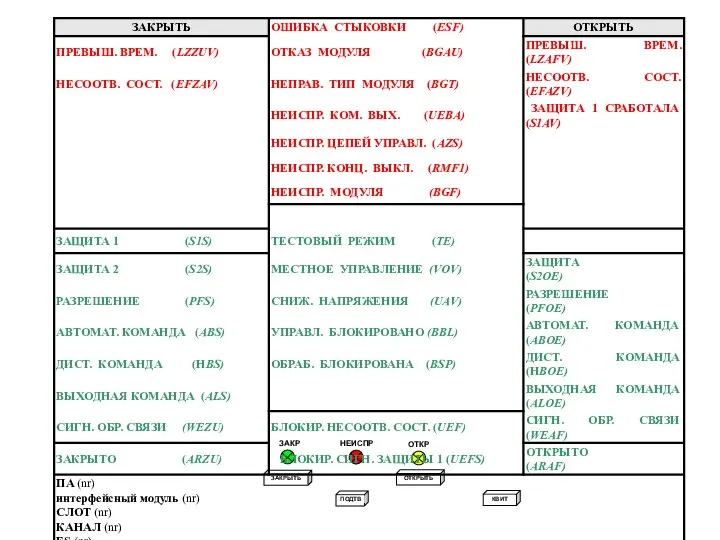
- 36. Индивидуальная диаграмма состояния функции ESG-S на дисплее ДС
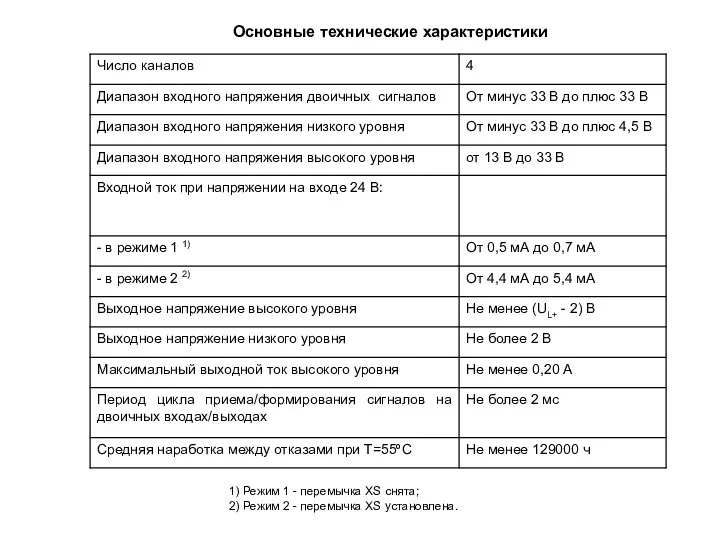
- 38. Основные технические характеристики 1) Режим 1 - перемычка XS снята; 2) Режим 2 - перемычка XS
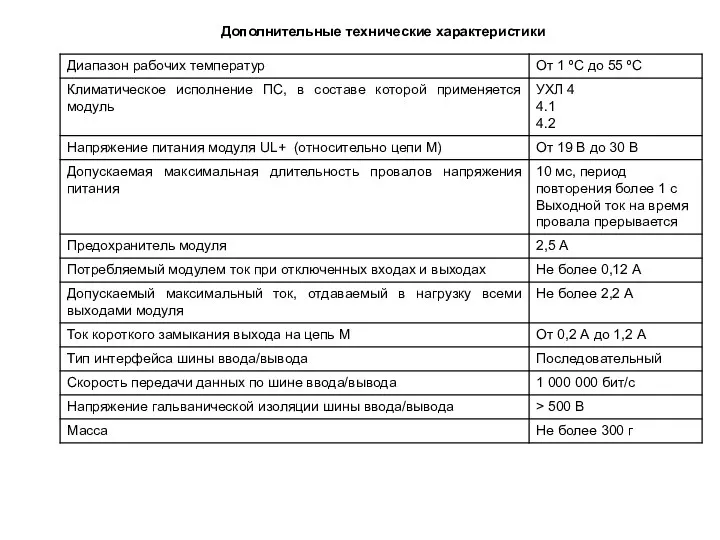
- 39. Дополнительные технические характеристики
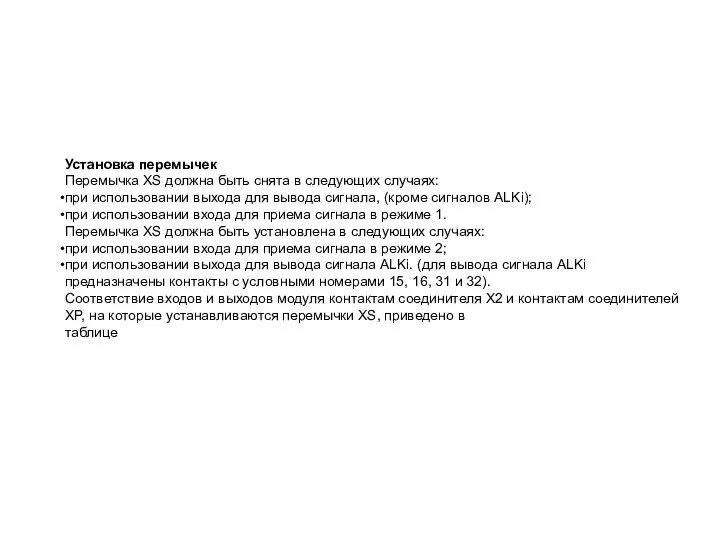
- 40. Установка перемычек Перемычка XS должна быть снята в следующих случаях: при использовании выхода для вывода сигнала,
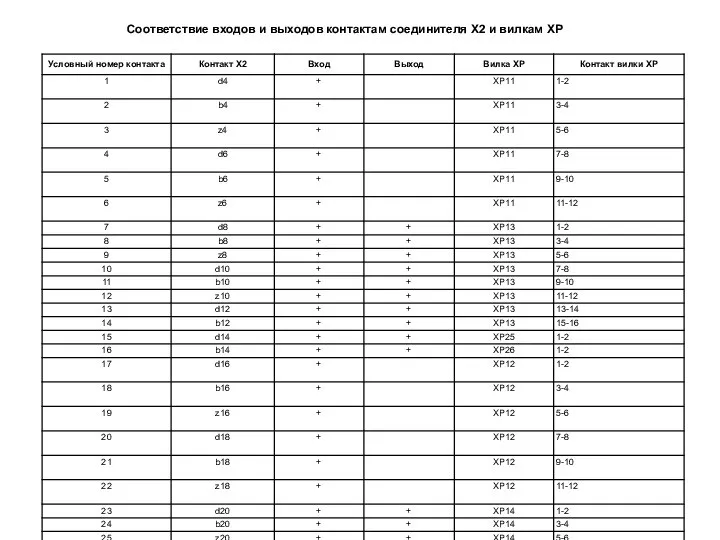
- 41. Соответствие входов и выходов контактам соединителя X2 и вилкам XP
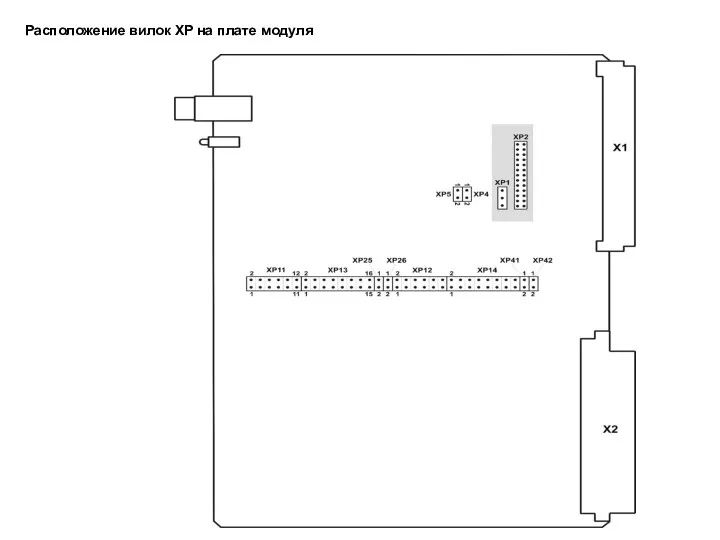
- 42. Расположение вилок XP на плате модуля
- 43. Параметрирование Функции, выполняемые входами и выходами модуля, а так же параметры этих функций, задаются в прикладной
- 44. Назначение входов и выходов каналу ESG-функция, определенная в модуле, может использовать для приема и вывода сигналов
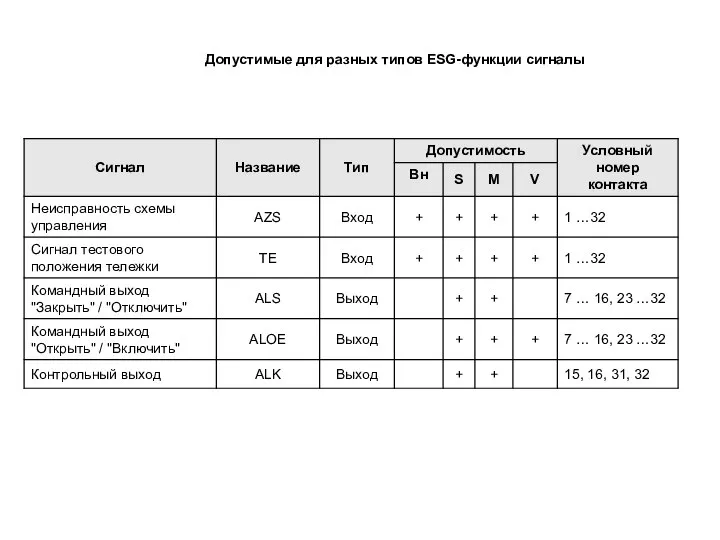
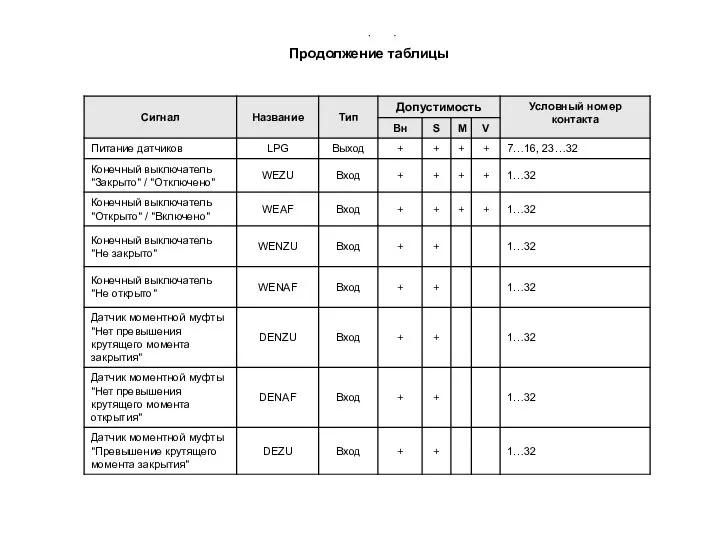
- 45. Допустимые для разных типов ESG-функции сигналы
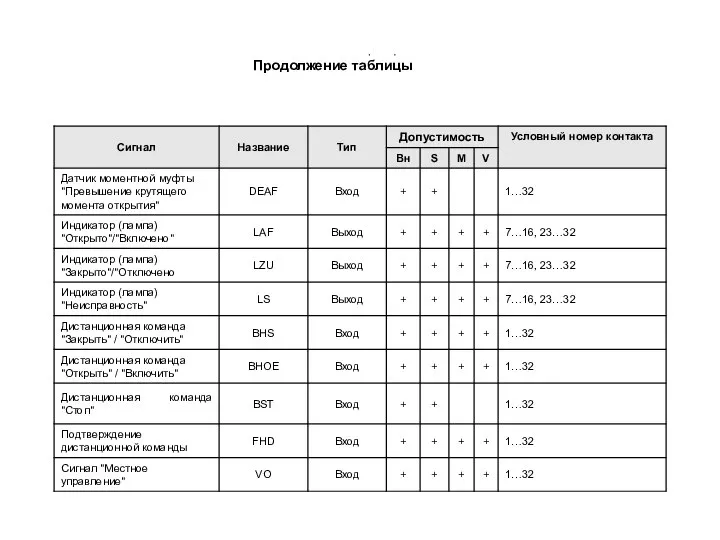
- 46. Продолжение таблицы
- 47. Продолжение таблицы
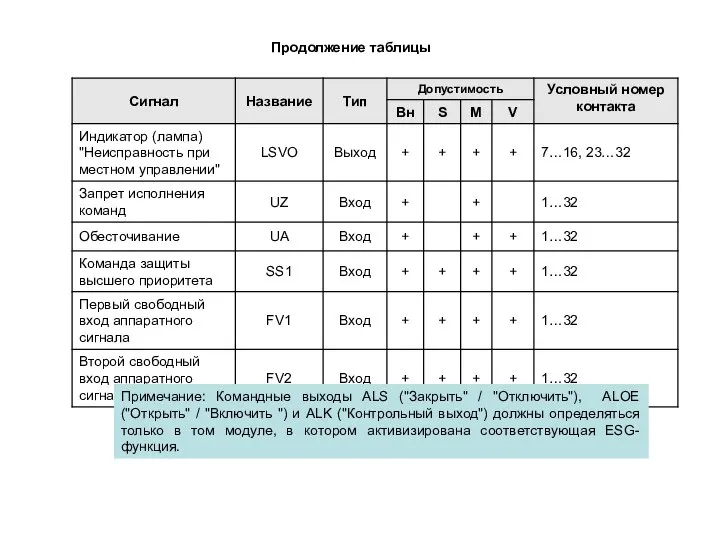
- 48. Продолжение таблицы Примечание: Командные выходы ALS ("Закрыть" / "Отключить"), ALOE ("Открыть" / "Включить ") и ALK
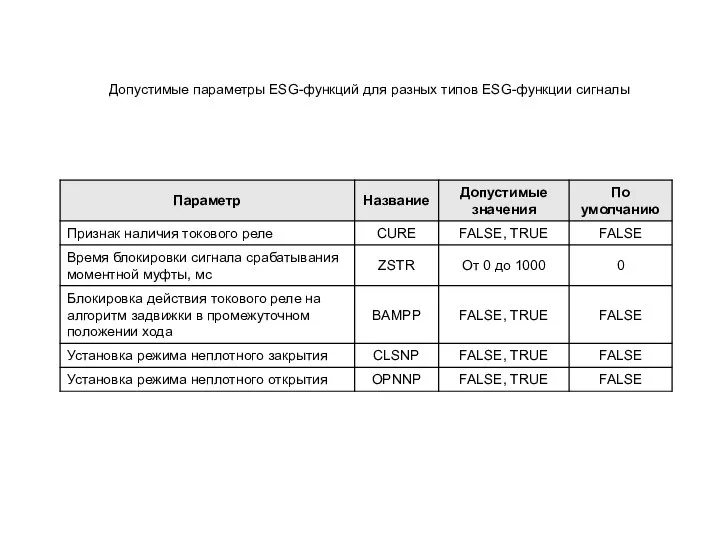
- 49. Допустимые параметры ESG-функций для разных типов ESG-функции сигналы
- 51. Скачать презентацию
Слайд 2Функции индивидуального управления (стандартные алгоритмы управления) реализуются в модуле связи с процессом
Функции индивидуального управления (стандартные алгоритмы управления) реализуются в модуле связи с процессом
Слайд 31 – ручки для удобства установки и изъятия модуля из крейта; 5
1 – ручки для удобства установки и изъятия модуля из крейта; 5
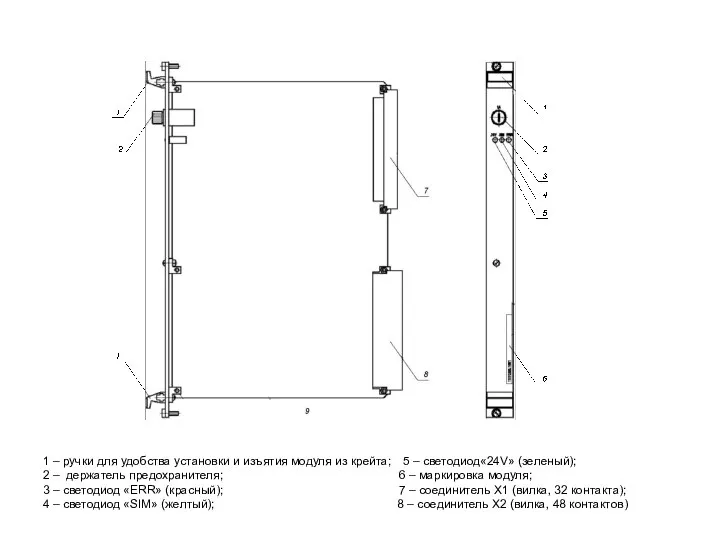
Слайд 4На передней панели модуля расположены держатель предохранителя (2), элементы индикации (3, 4,
На передней панели модуля расположены держатель предохранителя (2), элементы индикации (3, 4,
Слайд 5Функция индивидуального управления
Функции индивидуального управления исполнительными механизмами реализуются с помощью программных модулей,
Функция индивидуального управления
Функции индивидуального управления исполнительными механизмами реализуются с помощью программных модулей,
Слайд 6Самодиагностика
В модуле реализованы следующие виды самоконтроля:
контроль внешнего напряжения питания (признаки неисправностей INT24,
Самодиагностика
В модуле реализованы следующие виды самоконтроля:
контроль внешнего напряжения питания (признаки неисправностей INT24,
Слайд 7Реакция модуля на неисправности
Реакция модуля на неисправности
Слайд 8Индикация состояний и неисправностей модуля
Индикация состояний и неисправностей модуля
Слайд 9Работа в резервированном режиме
В резервированном режиме работы один из модулей является основным,
Работа в резервированном режиме
В резервированном режиме работы один из модулей является основным,
Слайд 10Функция управления электромотором ESG М
Входные сигналы обрабатываются функцией в соответствии с логикой.
Функция управления электромотором ESG М
Входные сигналы обрабатываются функцией в соответствии с логикой.
Слайд 11Средствами логики устанавливаются следующие приоритеты команд:
защитные команды ОТКЛ (SA1, FSA1, UA, SA2)
Средствами логики устанавливаются следующие приоритеты команд:
защитные команды ОТКЛ (SA1, FSA1, UA, SA2)
Слайд 12Защитные команды включения/отключения исполняются без сигналов разрешения. Сигнал S1A («Защитное отключение высшего
Защитные команды включения/отключения исполняются без сигналов разрешения. Сигнал S1A («Защитное отключение высшего
Слайд 13Тестирование агрегата (вход FTE)
Через вход FTE модулю сообщается, что коммутируемая установка
Тестирование агрегата (вход FTE)
Через вход FTE модулю сообщается, что коммутируемая установка
Слайд 14Снижение силового напряжения питания электродвигателя
Если необходимо, то внешними средствами может контролироваться напряжение
Снижение силового напряжения питания электродвигателя
Если необходимо, то внешними средствами может контролироваться напряжение
Слайд 15Режимы выходных команд
Запоминание команды
Входные команды записываются в буферы команд в зависимости
Режимы выходных команд
Запоминание команды
Входные команды записываются в буферы команд в зависимости
Слайд 16Режим с запоминанием команды в командном буфере, для пускателя с самоподхватом команды
Режим с запоминанием команды в командном буфере, для пускателя с самоподхватом команды
Слайд 17Режим с запоминанием команды в командном буфере, для пускателя без самоподхвата команды
Слайд 18Обратные связи
В качестве входов функции ESG используются сигналы обратных связей RMA
Обратные связи
В качестве входов функции ESG используются сигналы обратных связей RMA
Слайд 19Контроль несоответствия заданного состояния
Контроль несоответствия заданного состояния (положения) агрегата срабатывает, если
Контроль несоответствия заданного состояния
Контроль несоответствия заданного состояния (положения) агрегата срабатывает, если
Слайд 20Срабатывание защиты
Если при наличии обратного сигнала RME поступает команда защиты агрегата
Срабатывание защиты
Если при наличии обратного сигнала RME поступает команда защиты агрегата
Слайд 21Контроль времени исполнения команды
Контроль времени исполнения команды срабатывает, когда время между
Контроль времени исполнения команды
Контроль времени исполнения команды срабатывает, когда время между
Слайд 22Квитирование неисправностей
Сигналы неисправностей EFEAV, EFAEV, S1AV, LZAV и LZEV должны быть
Квитирование неисправностей
Сигналы неисправностей EFEAV, EFAEV, S1AV, LZAV и LZEV должны быть
Слайд 23Контроль обратных связей
Контроль обратных связей срабатывает, если на входах RMA (ОТКЛЮЧЕНО)
Контроль обратных связей
Контроль обратных связей срабатывает, если на входах RMA (ОТКЛЮЧЕНО)
Слайд 24Контроль блокировки команд
Контроль блокировки срабатывает, когда команда не может выполняться, потому
Контроль блокировки команд
Контроль блокировки срабатывает, когда команда не может выполняться, потому
Слайд 25Отказ электрических силовых цепей питания привода
Через вход AZS сигнализируется отказ в
Отказ электрических силовых цепей питания привода
Через вход AZS сигнализируется отказ в
Слайд 26Квитирование мигающей сигнализации при разборке электрической схемы управления арматурой
Разборка электрической схемы управления
Квитирование мигающей сигнализации при разборке электрической схемы управления арматурой
Разборка электрической схемы управления
Слайд 27Коммутирующая установка в состоянии теста
Через вход ТЕ в модуль может поступать сообщение
Коммутирующая установка в состоянии теста
Через вход ТЕ в модуль может поступать сообщение
Слайд 28Управление задвижками, имеющими особенности в своем функционировании
Адаптация алгоритма к управлению арматурой с
Управление задвижками, имеющими особенности в своем функционировании Адаптация алгоритма к управлению арматурой с
Слайд 29Адаптация алгоритма к управлению арматурой с кратковременным срабатыванием моментной муфты в начале
Адаптация алгоритма к управлению арматурой с кратковременным срабатыванием моментной муфты в начале
Слайд 30Адаптация алгоритма к схеме управления арматурой с уплотнением по токовому реле
В
Адаптация алгоритма к схеме управления арматурой с уплотнением по токовому реле
В
Слайд 31Если требуется блокировать срабатывания токового реле, связанные с кратковременными превышениями крутящего момента
Если требуется блокировать срабатывания токового реле, связанные с кратковременными превышениями крутящего момента
Слайд 32Адаптация алгоритма к управлению арматурой с сигналами от концевых выключателей WENZU (не-закр)
Адаптация алгоритма к управлению арматурой с сигналами от концевых выключателей WENZU (не-закр)
Слайд 33Адаптация алгоритма к управлению арматурой с сигналами от датчиков моментных муфт DEZU
Адаптация алгоритма к управлению арматурой с сигналами от датчиков моментных муфт DEZU
Слайд 34Логика сообщений
Логика сообщений функции ESG-S из отдельных сигналов неисправностей формирует обобщенные
Логика сообщений
Логика сообщений функции ESG-S из отдельных сигналов неисправностей формирует обобщенные
Слайд 35Индивидуальная диаграмма состояния функции ESG-M на дисплее ДС
Индивидуальная диаграмма состояния функции ESG-M на дисплее ДС
Слайд 36Индивидуальная диаграмма состояния функции ESG-S на дисплее ДС
Индивидуальная диаграмма состояния функции ESG-S на дисплее ДС
Слайд 38Основные технические характеристики
1) Режим 1 - перемычка XS снята;
2) Режим 2 -
Основные технические характеристики
1) Режим 1 - перемычка XS снята;
2) Режим 2 -
Слайд 39Дополнительные технические характеристики
Дополнительные технические характеристики
Слайд 40Установка перемычек
Перемычка XS должна быть снята в следующих случаях:
при использовании выхода для
Установка перемычек
Перемычка XS должна быть снята в следующих случаях:
при использовании выхода для
Слайд 41Соответствие входов и выходов контактам соединителя X2 и вилкам XP
Соответствие входов и выходов контактам соединителя X2 и вилкам XP
Слайд 42Расположение вилок XP на плате модуля
Расположение вилок XP на плате модуля
Слайд 43Параметрирование
Функции, выполняемые входами и выходами модуля, а так же параметры этих функций,
Параметрирование
Функции, выполняемые входами и выходами модуля, а так же параметры этих функций,
Слайд 44Назначение входов и выходов каналу
ESG-функция, определенная в модуле, может использовать для приема
Назначение входов и выходов каналу
ESG-функция, определенная в модуле, может использовать для приема
Слайд 45Допустимые для разных типов ESG-функции сигналы
Допустимые для разных типов ESG-функции сигналы
Слайд 46Продолжение таблицы
Продолжение таблицы
Слайд 47Продолжение таблицы
Продолжение таблицы
Слайд 48Продолжение таблицы
Примечание: Командные выходы ALS ("Закрыть" / "Отключить"), ALOE ("Открыть" /
Продолжение таблицы
Примечание: Командные выходы ALS ("Закрыть" / "Отключить"), ALOE ("Открыть" /
Слайд 49Допустимые параметры ESG-функций для разных типов ESG-функции сигналы
Допустимые параметры ESG-функций для разных типов ESG-функции сигналы
 Презентация нового продукта «Обзор заработных плат»
Презентация нового продукта «Обзор заработных плат» ПЛЮСЫ И МИНУСЫ, ПОЛОЖИТЕЛЬНОЕ И ОТРИЦАТЕЛЬНОЕ В МАТЕМАТИКЕ И В ЖИЗНИ
ПЛЮСЫ И МИНУСЫ, ПОЛОЖИТЕЛЬНОЕ И ОТРИЦАТЕЛЬНОЕ В МАТЕМАТИКЕ И В ЖИЗНИ Фриденсрайх Хундертвассер
Фриденсрайх Хундертвассер Аналоговые и цифровые сигналы
Аналоговые и цифровые сигналы Право для школьников
Право для школьников 6b8c575b324073cbf02a3d966912b4c92047c6ed — копия
6b8c575b324073cbf02a3d966912b4c92047c6ed — копия Реклама ВКонтакте
Реклама ВКонтакте В поход всей семьей – это здорово! Семейный выходной
В поход всей семьей – это здорово! Семейный выходной Акцизы с 1 января 2009 года
Акцизы с 1 января 2009 года Презентация на тему: Оценка качества предоставляемых образовательных услуг
Презентация на тему: Оценка качества предоставляемых образовательных услуг Презентация на тему Средства для борьбы с насекомыми
Презентация на тему Средства для борьбы с насекомыми Презентация на тему Классическая теория экономического риска
Презентация на тему Классическая теория экономического риска  Луна
Луна Обучающая интерактивная игра на тематику Управление проектами
Обучающая интерактивная игра на тематику Управление проектами Пришкольный лагерь "Солнышко"
Пришкольный лагерь "Солнышко" Управление комплексом маркетинговых коммуникаций
Управление комплексом маркетинговых коммуникаций Информационная безопасность
Информационная безопасность НОВОСТИ ЕГЭ
НОВОСТИ ЕГЭ О чем идет речь - Об оценке деятельности подразделения Единица оценки – подразделение Оценка работы сотрудника – не включаетс
О чем идет речь - Об оценке деятельности подразделения Единица оценки – подразделение Оценка работы сотрудника – не включаетс Физика в музыке
Физика в музыке LFood. Сэндвичи
LFood. Сэндвичи Сложение сил, действующих вдоль одной прямой. Равнодействующая
Сложение сил, действующих вдоль одной прямой. Равнодействующая «Мастерская чтения – идеи, проекты, воплощения»
«Мастерская чтения – идеи, проекты, воплощения» Использование Интернет-тренажеров при подготовке студентов к аккредитационному тестированию Сайт www.i-exam.ru
Использование Интернет-тренажеров при подготовке студентов к аккредитационному тестированию Сайт www.i-exam.ru Куликовская битва
Куликовская битва Архитектурные стили Петербурга
Архитектурные стили Петербурга Модернизация ЛВС в рамках создания регионального фрагмента единой государственной информационной системы в сфере здравоохране
Модернизация ЛВС в рамках создания регионального фрагмента единой государственной информационной системы в сфере здравоохране 3 Ховайло ВВ - Презентация проекта на открытие - СОГЛ (С) 20.10
3 Ховайло ВВ - Презентация проекта на открытие - СОГЛ (С) 20.10