- МПСУ управляемыми выпрямителями

Содержание
- 2. Глава 2. МПСУ управляемыми выпрямителями
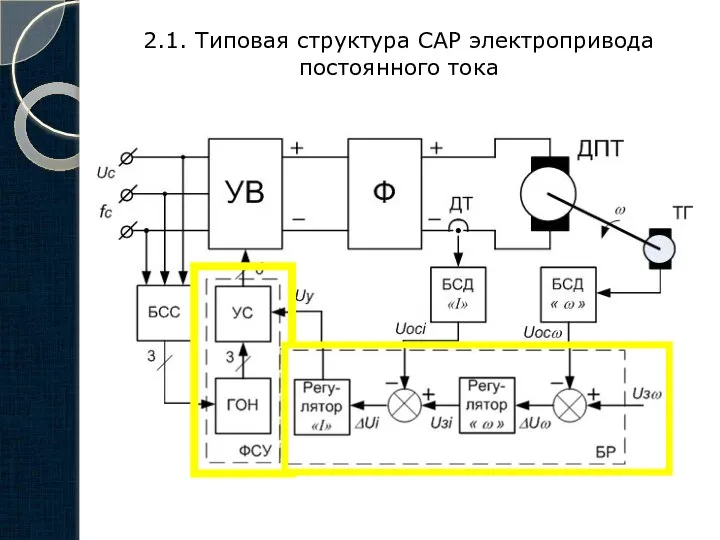
- 3. 2.1. Типовая структура САР электропривода постоянного тока
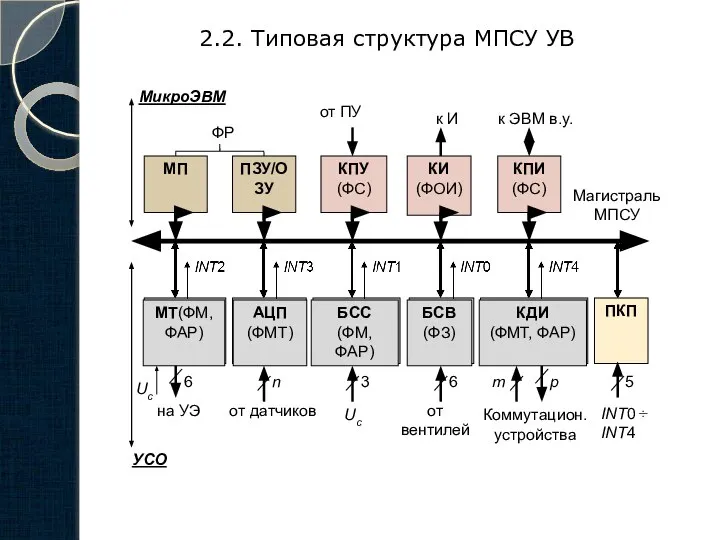
- 4. 2.2. Типовая структура МПСУ УВ Uc МикроЭВМ УСО Магистраль МПСУ Uc к ЭВМ в.у. 5 p
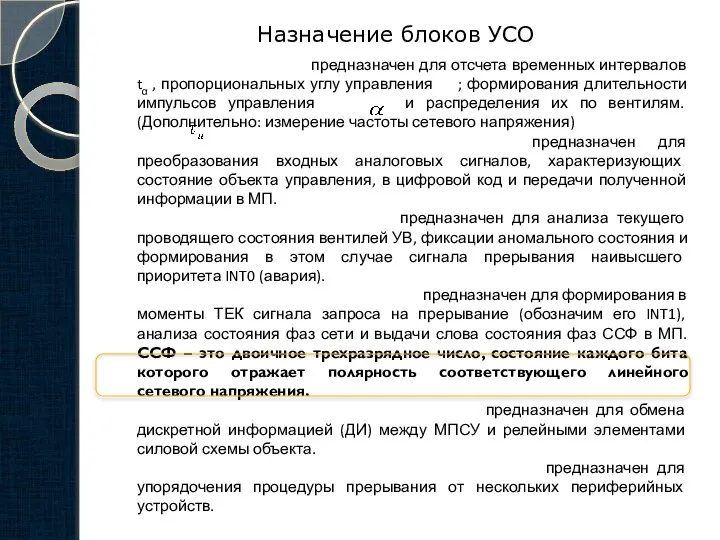
- 5. Назначение блоков УСО Модуль таймеров МТ предназначен для отсчета временных интервалов tα , пропорциональных углу управления
- 6. 2.3. Построение и реализация программной МПСУ УВ 2.3.1. Назначение программной МПСУ УВ Назначение программной части: формирование
- 7. 2.3.2. Блок синхронизации с сетью
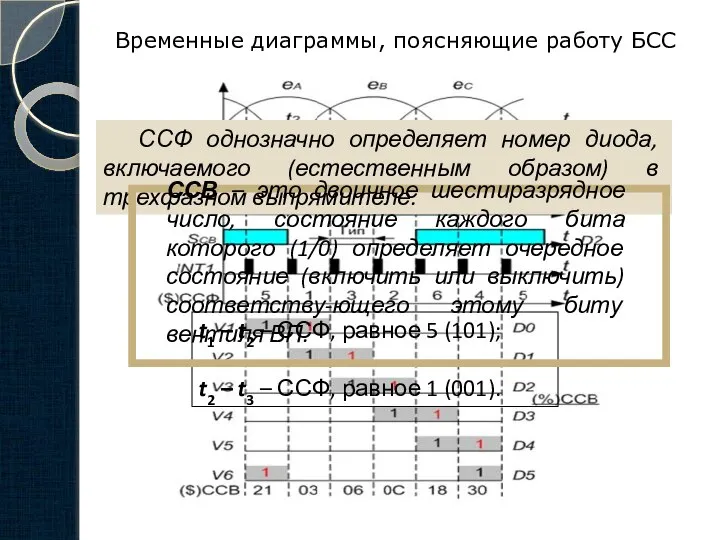
- 8. Временные диаграммы, поясняющие работу БСС ССФ однозначно определяет номер диода, включаемого (естественным образом) в трехфазном выпрямителе.
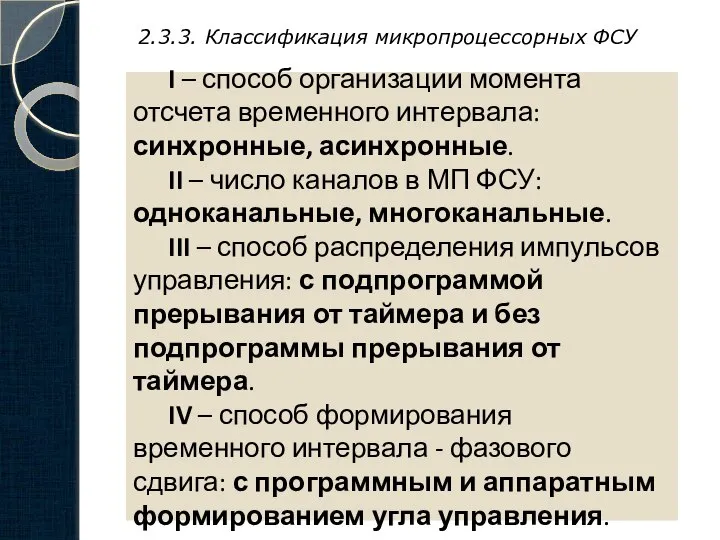
- 9. 2.3.3. Классификация микропроцессорных ФСУ I – способ организации момента отсчета временного интервала: синхронные, асинхронные. II –
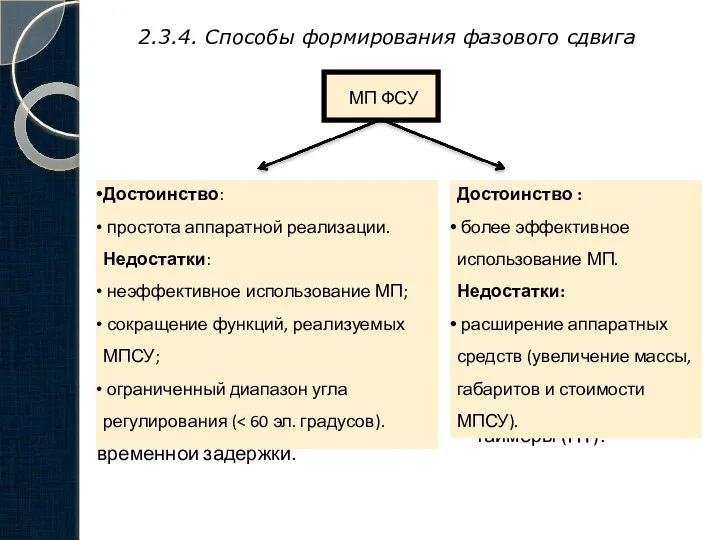
- 10. 2.3.4. Способы формирования фазового сдвига Программный способ основан на том факте, что любая команда МП выполняется
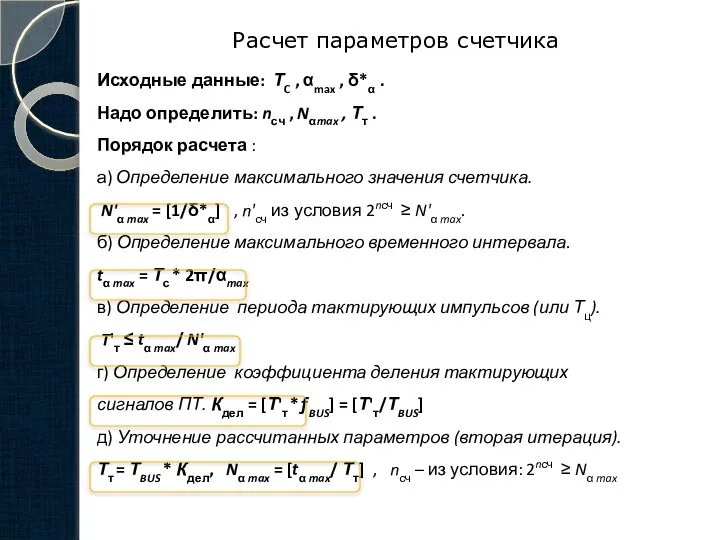
- 11. Расчет параметров счетчика Исходные данные: ТC , αmax , δ*α . Надо определить: nсч , Nαmax
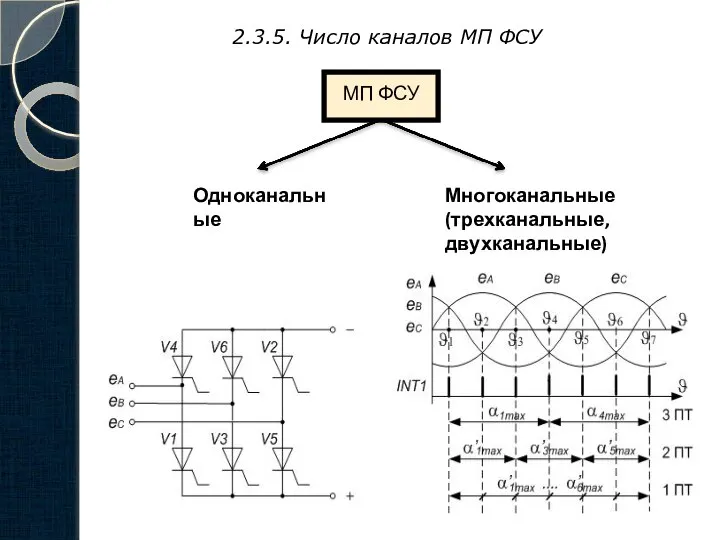
- 12. 2.3.5. Число каналов МП ФСУ МП ФСУ Одноканальные Многоканальные (трехканальные, двухканальные)
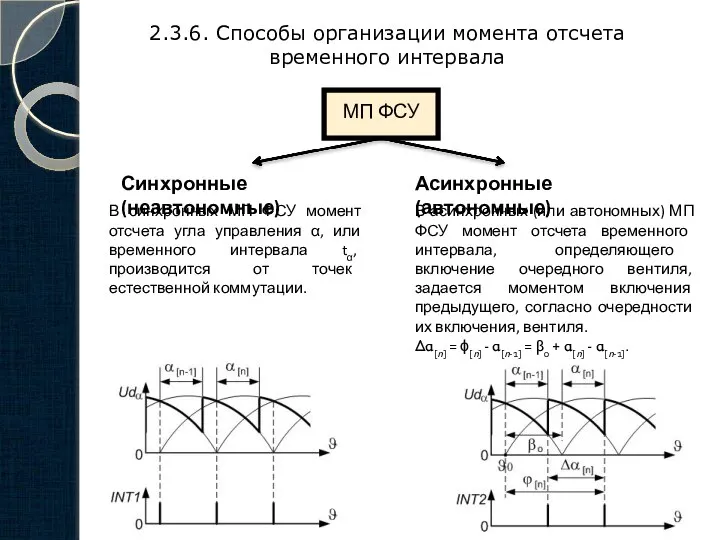
- 13. 2.3.6. Способы организации момента отсчета временного интервала МП ФСУ Синхронные (неавтономные) Асинхронные (автономные) В синхронных МП
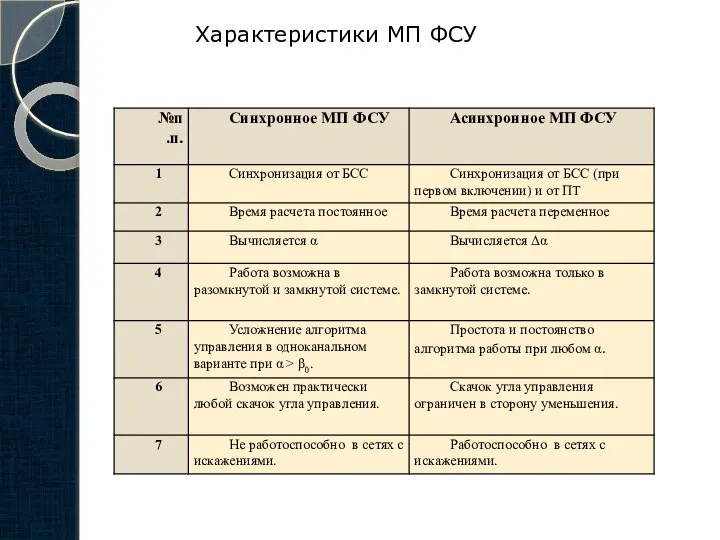
- 14. Характеристики МП ФСУ
- 15. 2.3.7. Способы распределения импульсов управления Схема функциональной части одноканального МП ФСУ, формирующего узкие импульсы управления
- 16. Функция алгоритмического распределения ФАР с подпрограммой преры-вания по ПТ: В заданный момент времени МП записывает в
- 17. 2.3.8. Особенности реализации одноканальных синхронных ФСУ при больших углах управления Дано: объект управления – трехфазный управляемый
- 18. Реализация 1-канальных синхронных ФСУ при α > β0
- 19. Варианты реализации БСС и МП ФСУ 1. Реализация БСС на базе DSC TMS320F2812. Аппаратура: линии САР1-САР3
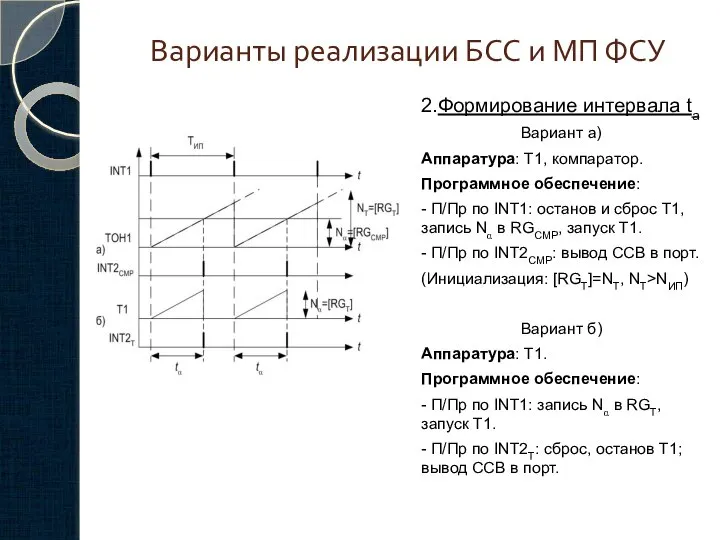
- 20. Варианты реализации БСС и МП ФСУ 2.Формирование интервала ta Вариант a) Аппаратура: Т1, компаратор. Программное обеспечение:
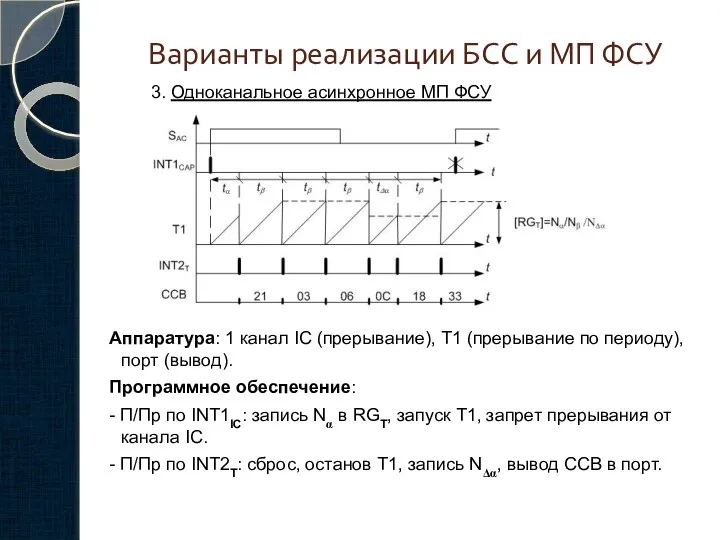
- 21. Варианты реализации БСС и МП ФСУ Аппаратура: 1 канал IC (прерывание), Т1 (прерывание по периоду), порт
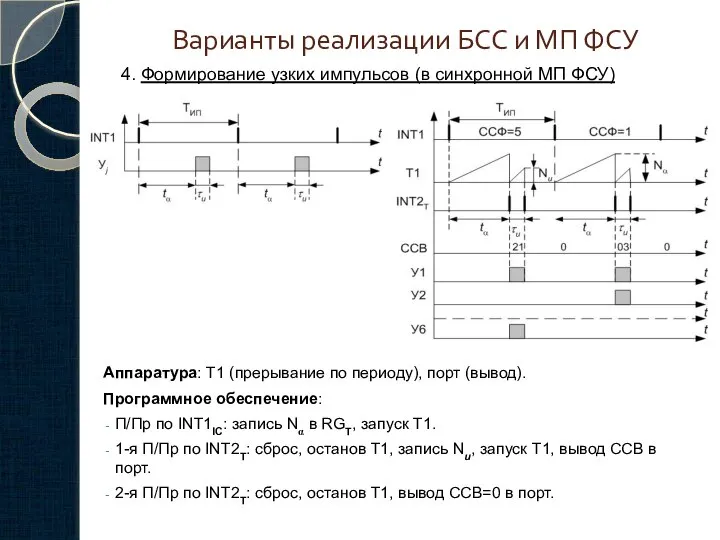
- 22. Варианты реализации БСС и МП ФСУ Аппаратура: Т1 (прерывание по периоду), порт (вывод). Программное обеспечение: П/Пр
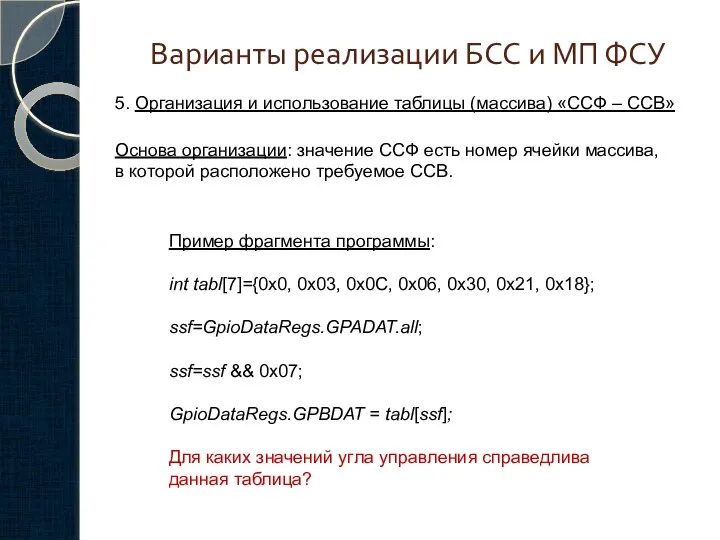
- 23. Варианты реализации БСС и МП ФСУ Основа организации: значение ССФ есть номер ячейки массива, в которой
- 24. 2.4. Типовая структура ПО МПСУ УВ МПСУ – единство аппаратных и программных средств. Назначение ПО: содержит
- 25. Типовая структура ПО МПСУ УВ Из П/Пр прерывания по аварии 1 Кл=1 Пусковая программа Головная программа
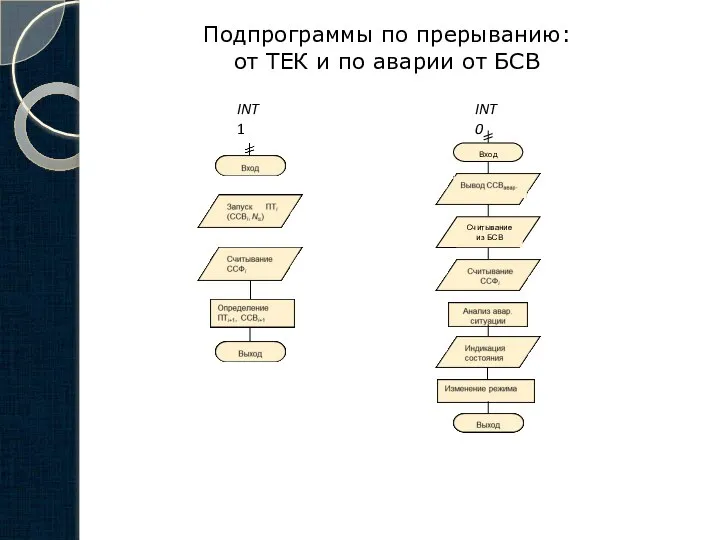
- 26. Подпрограммы по прерыванию: от ТЕК и по аварии от БСВ
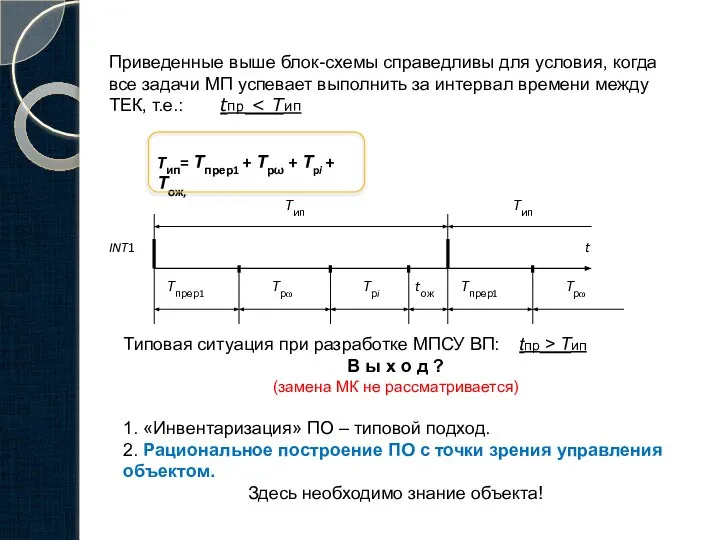
- 27. Tип= Тпрер1 + Трω + Тpi + Тож, Приведенные выше блок-схемы справедливы для условия, когда все
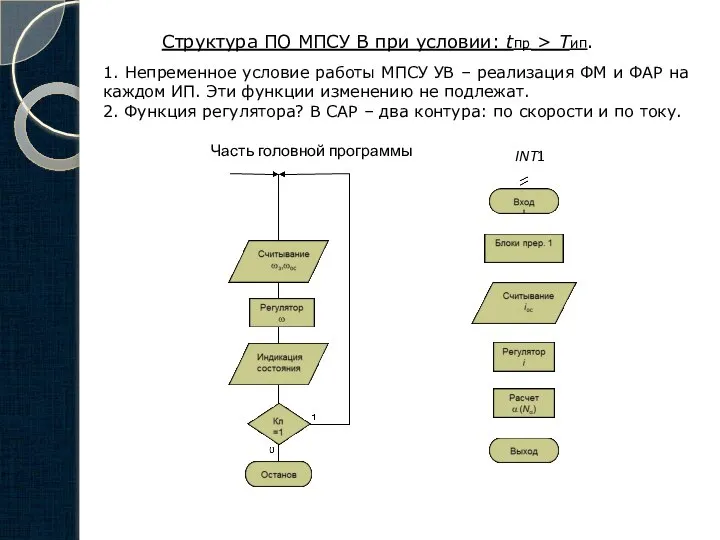
- 28. Структура ПО МПСУ В при условии: tпр > Тип. 1. Непременное условие работы МПСУ УВ –
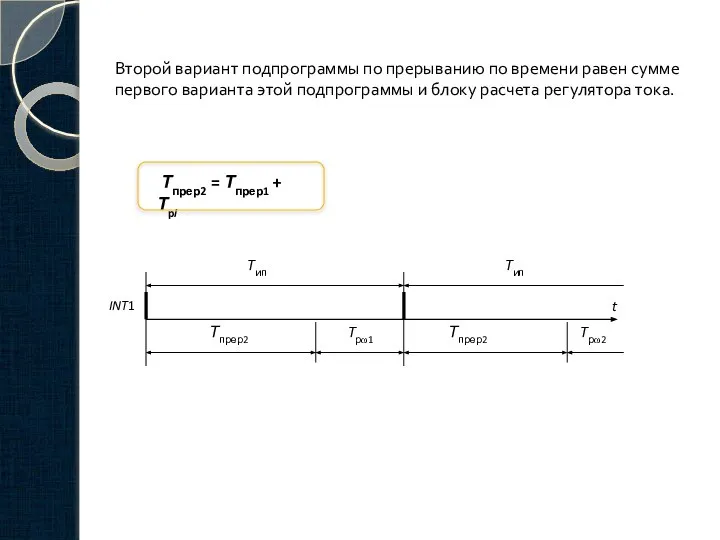
- 29. Тпрер2 = Тпрер1 + Тpi Второй вариант подпрограммы по прерыванию по времени равен сумме первого варианта
- 30. Условие: tпр Данное обстоятельство можно использовать для расширения функций МПСУ и/или улучшение качества регулирования: Ввести в
- 31. В заключение - важное замечание Приведенный в данной главе материал может использо-ваться для реализации МПСУ любыми
- 33. Скачать презентацию
Слайд 32.1. Типовая структура САР электропривода постоянного тока
2.1. Типовая структура САР электропривода постоянного тока
Слайд 42.2. Типовая структура МПСУ УВ
Uc
МикроЭВМ
УСО
Магистраль МПСУ
Uc
к ЭВМ в.у.
5
p
6
3
n
6
МП
ПЗУ/ОЗУ
КПУ (ФС)
КИ (ФОИ)
КПИ (ФС)
ФР
от ПУ
к
2.2. Типовая структура МПСУ УВ
Uc
МикроЭВМ
УСО
Магистраль МПСУ
Uc
к ЭВМ в.у.
5
p
6
3
n
6
МП
ПЗУ/ОЗУ
КПУ (ФС)
КИ (ФОИ)
КПИ (ФС)
ФР
от ПУ
к
Слайд 5Назначение блоков УСО
Модуль таймеров МТ предназначен для отсчета временных интервалов tα ,
Назначение блоков УСО
Модуль таймеров МТ предназначен для отсчета временных интервалов tα ,
Слайд 62.3. Построение и реализация программной МПСУ УВ
2.3.1. Назначение программной МПСУ УВ
Назначение программной
2.3. Построение и реализация программной МПСУ УВ
2.3.1. Назначение программной МПСУ УВ
Назначение программной
Слайд 72.3.2. Блок синхронизации с сетью
2.3.2. Блок синхронизации с сетью

Слайд 8Временные диаграммы, поясняющие работу БСС
ССФ однозначно определяет номер диода, включаемого (естественным образом)
Временные диаграммы, поясняющие работу БСС
ССФ однозначно определяет номер диода, включаемого (естественным образом)
Слайд 92.3.3. Классификация микропроцессорных ФСУ
I – способ организации момента отсчета временного интервала: синхронные,
2.3.3. Классификация микропроцессорных ФСУ
I – способ организации момента отсчета временного интервала: синхронные,
Слайд 102.3.4. Способы формирования фазового сдвига
Программный способ основан на том факте, что любая
2.3.4. Способы формирования фазового сдвига
Программный способ основан на том факте, что любая
Слайд 11Расчет параметров счетчика
Исходные данные: ТC , αmax , δ*α .
Надо определить: nсч
Расчет параметров счетчика
Исходные данные: ТC , αmax , δ*α .
Надо определить: nсч
Слайд 122.3.5. Число каналов МП ФСУ
МП ФСУ
Одноканальные
Многоканальные (трехканальные, двухканальные)
2.3.5. Число каналов МП ФСУ
МП ФСУ
Одноканальные
Многоканальные (трехканальные, двухканальные)
Слайд 132.3.6. Способы организации момента отсчета временного интервала
МП ФСУ
Синхронные (неавтономные)
Асинхронные (автономные)
В
2.3.6. Способы организации момента отсчета временного интервала
МП ФСУ
Синхронные (неавтономные)
Асинхронные (автономные)
В
Слайд 14Характеристики МП ФСУ
Характеристики МП ФСУ
Слайд 152.3.7. Способы распределения импульсов управления
Схема функциональной части одноканального МП ФСУ, формирующего узкие
2.3.7. Способы распределения импульсов управления
Схема функциональной части одноканального МП ФСУ, формирующего узкие

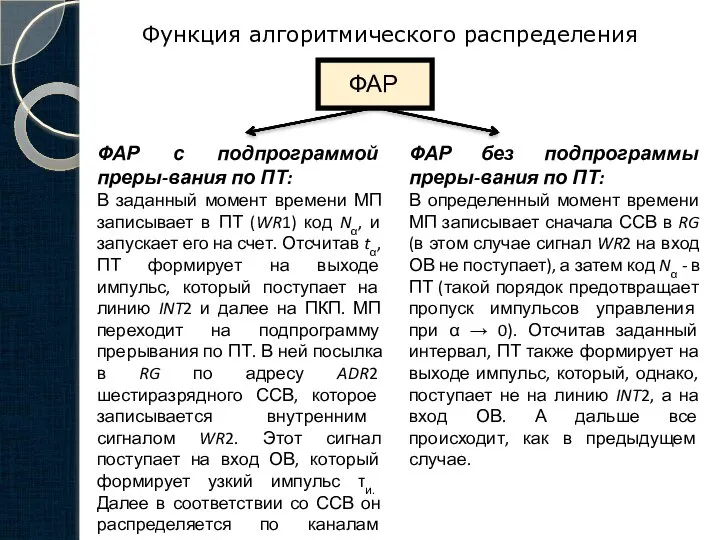
Слайд 16Функция алгоритмического распределения
ФАР с подпрограммой преры-вания по ПТ:
В заданный момент времени МП
Функция алгоритмического распределения
ФАР с подпрограммой преры-вания по ПТ:
В заданный момент времени МП
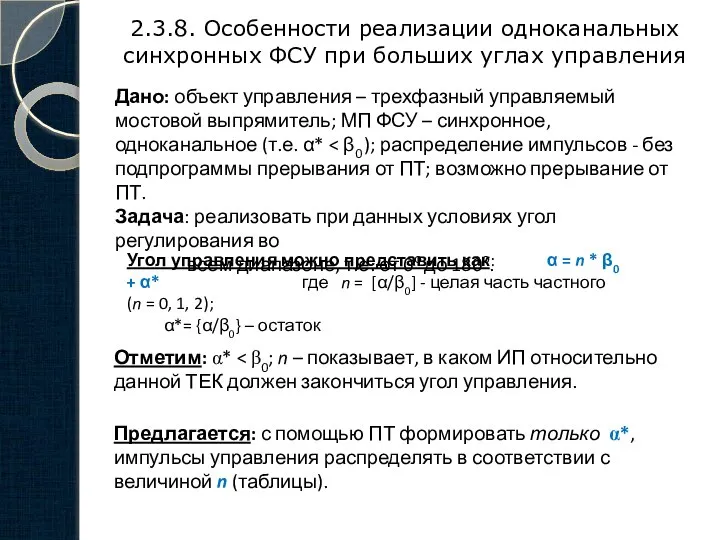
Слайд 172.3.8. Особенности реализации одноканальных синхронных ФСУ при больших углах управления
Дано: объект управления
2.3.8. Особенности реализации одноканальных синхронных ФСУ при больших углах управления
Дано: объект управления
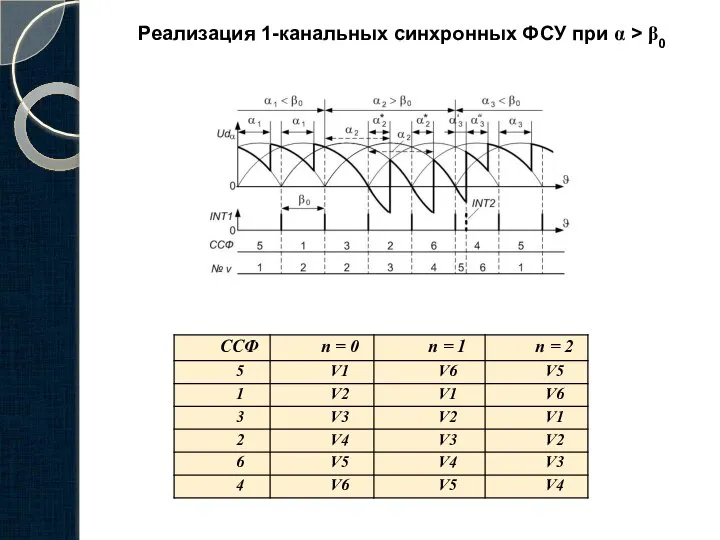
Слайд 18Реализация 1-канальных синхронных ФСУ при α > β0
Реализация 1-канальных синхронных ФСУ при α > β0
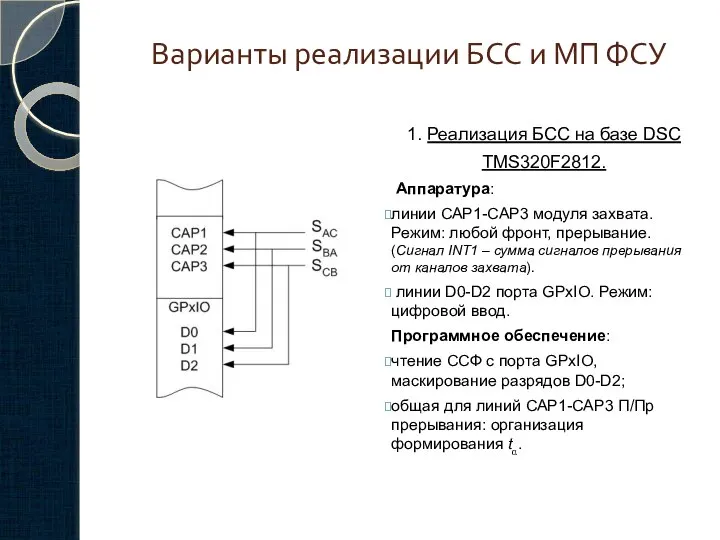
Слайд 19Варианты реализации БСС и МП ФСУ
1. Реализация БСС на базе DSC
TMS320F2812.
Варианты реализации БСС и МП ФСУ
1. Реализация БСС на базе DSC
TMS320F2812.
Слайд 20Варианты реализации БСС и МП ФСУ
2.Формирование интервала ta
Вариант a)
Аппаратура: Т1, компаратор.
Программное
Варианты реализации БСС и МП ФСУ
2.Формирование интервала ta
Вариант a)
Аппаратура: Т1, компаратор.
Программное
Слайд 21Варианты реализации БСС и МП ФСУ
Аппаратура: 1 канал IC (прерывание), Т1 (прерывание
Варианты реализации БСС и МП ФСУ
Аппаратура: 1 канал IC (прерывание), Т1 (прерывание
Слайд 22Варианты реализации БСС и МП ФСУ
Аппаратура: Т1 (прерывание по периоду), порт (вывод).
Варианты реализации БСС и МП ФСУ
Аппаратура: Т1 (прерывание по периоду), порт (вывод).
Слайд 23Варианты реализации БСС и МП ФСУ
Основа организации: значение ССФ есть номер ячейки
Варианты реализации БСС и МП ФСУ
Основа организации: значение ССФ есть номер ячейки
Слайд 242.4. Типовая структура ПО МПСУ УВ
МПСУ – единство аппаратных и программных средств.
Назначение
2.4. Типовая структура ПО МПСУ УВ
МПСУ – единство аппаратных и программных средств.
Назначение
Слайд 25Типовая структура ПО МПСУ УВ
Из П/Пр прерывания по аварии
1
Кл=1
Пусковая программа
Головная программа
Типовая структура ПО МПСУ УВ
Из П/Пр прерывания по аварии
1
Кл=1
Пусковая программа
Головная программа

Слайд 26Подпрограммы по прерыванию:
от ТЕК и по аварии от БСВ
Подпрограммы по прерыванию:
от ТЕК и по аварии от БСВ
Слайд 27Tип= Тпрер1 + Трω + Тpi + Тож,
Приведенные выше блок-схемы справедливы для
Tип= Тпрер1 + Трω + Тpi + Тож,
Приведенные выше блок-схемы справедливы для
Слайд 28Структура ПО МПСУ В при условии: tпр > Тип.
1. Непременное условие работы
Структура ПО МПСУ В при условии: tпр > Тип.
1. Непременное условие работы
Слайд 29 Тпрер2 = Тпрер1 + Тpi
Второй вариант подпрограммы по прерыванию по времени
Тпрер2 = Тпрер1 + Тpi
Второй вариант подпрограммы по прерыванию по времени
Слайд 30Условие: tпр << Тип
Данное обстоятельство можно использовать для расширения функций МПСУ и/или
Условие: tпр << Тип
Данное обстоятельство можно использовать для расширения функций МПСУ и/или
Слайд 31В заключение - важное замечание
Приведенный в данной главе материал может использо-ваться для
В заключение - важное замечание
Приведенный в данной главе материал может использо-ваться для
 Деепричастие
Деепричастие Продажа помещения. Фото (11)
Продажа помещения. Фото (11) Действия с фрагментами рисунка
Действия с фрагментами рисунка Развитие взглядов на природу света. Скорость света
Развитие взглядов на природу света. Скорость света Алкоголизм называют "болезнью номер три" после сердечнососудистых и онкологических заболеваний. Алкоголизм - болезнь очень странн
Алкоголизм называют "болезнью номер три" после сердечнососудистых и онкологических заболеваний. Алкоголизм - болезнь очень странн Экстремумы функции
Экстремумы функции ФГОС
ФГОС Презентация на тему Прямоугольный параллелепипед
Презентация на тему Прямоугольный параллелепипед Байкал
Байкал Презентация на тему Особенности размножения рыб 7 класс
Презентация на тему Особенности размножения рыб 7 класс  Константин Дмитриевич Флавицкий. Княжна Тараканова
Константин Дмитриевич Флавицкий. Княжна Тараканова Презентация на тему: П.Л.Чебышев – создатель Петербургской математической школы
Презентация на тему: П.Л.Чебышев – создатель Петербургской математической школы Товары для малышей. Торговая марка Markus
Товары для малышей. Торговая марка Markus Домодедово, Каширское ш. 3
Домодедово, Каширское ш. 3 Костромское деревянное зодчество
Костромское деревянное зодчество My future
My future Принципы решения научных задач в медицине
Принципы решения научных задач в медицине Презентация на тему Как человек открывал Землю
Презентация на тему Как человек открывал Землю  Миграция на SQL Server 2008:Чего можно ожидать и как с этим бороться
Миграция на SQL Server 2008:Чего можно ожидать и как с этим бороться Презентация на тему Химический элемент - водород
Презентация на тему Химический элемент - водород Эмоционально творческое развитие дошкольников посредством цветотерапии
Эмоционально творческое развитие дошкольников посредством цветотерапии Новые подходы к организации внеучебной деятельности в НГУЭУ НИНХ
Новые подходы к организации внеучебной деятельности в НГУЭУ НИНХ Календарное планирование в разновозрастной (санаторной) группе. Дети с 3-х до 7 лет
Календарное планирование в разновозрастной (санаторной) группе. Дети с 3-х до 7 лет Перспективы применения технологий открытого кода (Open Source) для системы формирования информационных ресурсов и аналитической подде
Перспективы применения технологий открытого кода (Open Source) для системы формирования информационных ресурсов и аналитической подде Вводные слова и вводные предложения. Вставные конструкции
Вводные слова и вводные предложения. Вставные конструкции Сервис дистанционной подготовки к ЕГЭhttp://www.edu-on-line.ru приветствует Вас!
Сервис дистанционной подготовки к ЕГЭhttp://www.edu-on-line.ru приветствует Вас! Справочник «Полиграфия Украины»
Справочник «Полиграфия Украины» Новинки в ассортименте фасадной плитки Hauberk-2021
Новинки в ассортименте фасадной плитки Hauberk-2021