- Научно-исследовательский Ядерный Университет МИФИФакультетская лаборатория «Робототехника»

Содержание
- 2. «Перспективы человеко-компьютерного интерфейса в робототехнике». Содержание О лаборатории ФНУЛ «Робототехника» НИЯУ МИФИ. Состояние технологии BCI в
- 3. Роботы семейства Pioneer фирмы Mobil Robots Inc
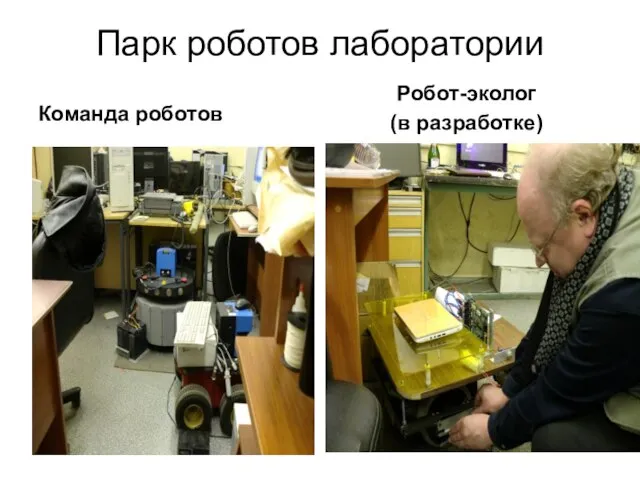
- 4. Парк роботов лаборатории Команда роботов Робот-эколог (в разработке)
- 5. Робот-паук AH3-R-MEPhI (Lynxmotion Inc., )
- 6. Робот-паук Программная система управления мобильного робототехнического комплекса AH3-R-MEPhI, основана на разработанной в МИФИ аппаратной плате для
- 7. Робот «МИФИ-РЭ»
- 8. Некоторые характеристики Робот МИФИ-РЭ (робот-эколог) полностью спроектирован и изготовлен в МИФИ. В качестве бортового компьютера использован
- 9. Основные направления исследований и разработок лаборатории Разработка интерфейсных электронных плат для роботов Разработка языка действий роботов
- 10. Технологические направления Сети передачи данных( Wi-Fi, Ethernet, радиоканал). Оптимизация трафика в сетях, сетевая безопасность. Сети передачи
- 11. Язык действий (ЯД) Существует начальный прототип системы управления коллективом роботов, которая основана на методе ручного программирования
- 12. "Разработка метаязыка для управления роботом на основе языка действий (ЯД)". Многошаговое задание для робота формируется и
- 13. КРАТКОЕ РЕЗЮМЕ №1 В лаборатории «Робототехника» работают: студенты, аспиранты, сотрудники и молодые преподаватели. специалисты по архитектурам
- 14. Немного истории: человеко-машинный интерфейс Естественные способы человеко-машинного взаимодействия - стремление к восприятию всё менее формализованных, всё
- 15. Немного о медицине Медицина – ЭЭГ (открыт Г. Бергером в 1929 г. метод электроэнцефалографии ) +
- 16. Базовое определение В системах BCI используются : либо биопотенциалы мозга, зарегистрированные с поверхности скальпа, называются инвазивными.
- 17. Пример Первые попытки создания ИМК начались в 1980-х годах в Германии и США, чтобы помочь полностью
- 18. Инвазивные BCI Наиболее известные разработки в области инвазивных ИМК принадлежат группам Николелиса и Чапина. Они сконструировали
- 19. Динамика роста интереса к BCI в мире Исследования в области BCI, которые ограничивались только тремя научными
- 20. Настоящее: человеко-компьютерный интерфейс Мозго-машинные интерфейсы в США сейчас одна из самых актуальных и продвигаемых тем. Интерфейсом
- 21. США - DARPA В августе 2008 г. начат совместный проект Ирвинского университета (Irvine University), Университета Карнеги-Меллон
- 22. КРАТКОЕ РЕЗЮМЕ №2 Интерес в мире к тематике BCI достаточно быстро растет. Общий прогресс результатов –
- 23. «Система дистанционного управления роботом посредством нейроманипулятора» Разработка прототипа системы. Данная система позволила использовать вместо привычного графического
- 24. Дистанционное управление роботом Состояние разработки: реализована и опробована идея системы управления, показана принципиальная возможность реализации с
- 26. Дистанционное управление роботом Система позволяет взаимодействовать роботу с оператором в двух режимах: обучения с подкреплением воздействиями
- 27. Общие принципы Алгоритмически система распознавания решена с применением распознающей одномодульной нейронной сети, архитектура которой зависит от,
- 28. Некоторые факты Преимущества разработки: позволяет управлять роботом без стационарного рабочего места оператора, гибко настраивать систему требуемым
- 29. Публикации I.V. Bogin, E.V.Chepin, V.V. Danilov, A.V. Dronskiy, A.A. Dyumin, P.S. Sorokoumov. Hardware and Software for
- 30. КРАТКОЕ РЕЗЮМЕ №3 Возможно сотрудничество: В области целого ряда НИР/ОКР по робототехнике. При проведении некоторых комплексных
- 31. ИТОГ Объект управления (датчики/сенсоры, исполнительные механизмы, модель управления) – КОНТРОЛЛЕР. Связь/интерфейс между контроллером и управляющей ВС(человеком-оператором):
- 33. Скачать презентацию
Слайд 2
«Перспективы человеко-компьютерного интерфейса в робототехнике».
Содержание
О лаборатории ФНУЛ «Робототехника» НИЯУ МИФИ.
Состояние технологии BCI
«Перспективы человеко-компьютерного интерфейса в робототехнике».
Содержание
О лаборатории ФНУЛ «Робототехника» НИЯУ МИФИ.
Состояние технологии BCI
Слайд 3Роботы семейства Pioneer фирмы Mobil Robots Inc
Роботы семейства Pioneer фирмы Mobil Robots Inc

Слайд 4Парк роботов лаборатории
Команда роботов
Робот-эколог
(в разработке)
Парк роботов лаборатории
Команда роботов
Робот-эколог
(в разработке)
Слайд 5Робот-паук AH3-R-MEPhI
(Lynxmotion Inc., )
Робот-паук AH3-R-MEPhI
(Lynxmotion Inc., )

Слайд 6Робот-паук
Программная система управления мобильного робототехнического комплекса AH3-R-MEPhI, основана на разработанной в МИФИ
Робот-паук
Программная система управления мобильного робототехнического комплекса AH3-R-MEPhI, основана на разработанной в МИФИ
Слайд 7Робот «МИФИ-РЭ»
Робот «МИФИ-РЭ»

Слайд 8Некоторые характеристики
Робот МИФИ-РЭ (робот-эколог) полностью спроектирован и изготовлен в МИФИ.
В качестве
Некоторые характеристики
Робот МИФИ-РЭ (робот-эколог) полностью спроектирован и изготовлен в МИФИ.
В качестве
Слайд 9Основные направления исследований и разработок лаборатории
Разработка интерфейсных электронных плат для роботов
Разработка языка
Основные направления исследований и разработок лаборатории
Разработка интерфейсных электронных плат для роботов
Разработка языка
Слайд 10Технологические направления
Сети передачи данных( Wi-Fi, Ethernet, радиоканал).
Оптимизация трафика в сетях, сетевая безопасность.
Сети
Технологические направления
Сети передачи данных( Wi-Fi, Ethernet, радиоканал).
Оптимизация трафика в сетях, сетевая безопасность.
Сети
Слайд 11Язык действий (ЯД)
Существует начальный прототип системы управления коллективом роботов, которая основана на
Язык действий (ЯД)
Существует начальный прототип системы управления коллективом роботов, которая основана на
Слайд 12"Разработка метаязыка для управления роботом на основе языка действий (ЯД)".
Многошаговое задание
"Разработка метаязыка для управления роботом на основе языка действий (ЯД)".
Многошаговое задание
Слайд 13КРАТКОЕ РЕЗЮМЕ №1
В лаборатории «Робототехника» работают:
студенты, аспиранты, сотрудники и молодые
КРАТКОЕ РЕЗЮМЕ №1
В лаборатории «Робототехника» работают:
студенты, аспиранты, сотрудники и молодые
Слайд 14Немного истории: человеко-машинный интерфейс
Естественные способы человеко-машинного взаимодействия - стремление к восприятию всё
Немного истории: человеко-машинный интерфейс
Естественные способы человеко-машинного взаимодействия - стремление к восприятию всё
Слайд 15Немного о медицине
Медицина – ЭЭГ (открыт Г. Бергером в 1929 г. метод
Немного о медицине
Медицина – ЭЭГ (открыт Г. Бергером в 1929 г. метод
Слайд 16Базовое определение
В системах BCI используются :
либо биопотенциалы мозга, зарегистрированные с поверхности
Базовое определение
В системах BCI используются :
либо биопотенциалы мозга, зарегистрированные с поверхности
Слайд 17Пример
Первые попытки создания ИМК начались в 1980-х годах в Германии и США,
Пример
Первые попытки создания ИМК начались в 1980-х годах в Германии и США,
Слайд 18Инвазивные BCI
Наиболее известные разработки в области инвазивных ИМК принадлежат группам Николелиса и
Инвазивные BCI
Наиболее известные разработки в области инвазивных ИМК принадлежат группам Николелиса и
Слайд 19Динамика роста интереса к BCI в мире
Исследования в области BCI, которые ограничивались
Динамика роста интереса к BCI в мире
Исследования в области BCI, которые ограничивались
Слайд 20Настоящее: человеко-компьютерный интерфейс
Мозго-машинные интерфейсы в США сейчас одна из самых актуальных и
Настоящее: человеко-компьютерный интерфейс
Мозго-машинные интерфейсы в США сейчас одна из самых актуальных и
Слайд 21США - DARPA
В августе 2008 г. начат совместный проект Ирвинского университета (Irvine
США - DARPA
В августе 2008 г. начат совместный проект Ирвинского университета (Irvine
Слайд 22КРАТКОЕ РЕЗЮМЕ №2
Интерес в мире к тематике BCI достаточно быстро растет.
Общий
КРАТКОЕ РЕЗЮМЕ №2
Интерес в мире к тематике BCI достаточно быстро растет.
Общий
Слайд 23«Система дистанционного управления роботом посредством нейроманипулятора»
Разработка прототипа системы.
Данная система позволила использовать
«Система дистанционного управления роботом посредством нейроманипулятора»
Разработка прототипа системы.
Данная система позволила использовать
Слайд 24Дистанционное управление роботом
Состояние разработки: реализована и опробована идея системы управления, показана принципиальная
Дистанционное управление роботом
Состояние разработки: реализована и опробована идея системы управления, показана принципиальная

Слайд 26Дистанционное управление роботом
Система позволяет взаимодействовать роботу с оператором в двух режимах:
обучения
Дистанционное управление роботом
Система позволяет взаимодействовать роботу с оператором в двух режимах:
обучения
Слайд 27Общие принципы
Алгоритмически система распознавания решена с применением распознающей одномодульной нейронной сети, архитектура
Общие принципы
Алгоритмически система распознавания решена с применением распознающей одномодульной нейронной сети, архитектура
Слайд 28Некоторые факты
Преимущества разработки: позволяет управлять роботом без стационарного рабочего места оператора, гибко
Некоторые факты
Преимущества разработки: позволяет управлять роботом без стационарного рабочего места оператора, гибко
Слайд 29Публикации
I.V. Bogin, E.V.Chepin, V.V. Danilov, A.V. Dronskiy, A.A. Dyumin, P.S. Sorokoumov. Hardware
Публикации
I.V. Bogin, E.V.Chepin, V.V. Danilov, A.V. Dronskiy, A.A. Dyumin, P.S. Sorokoumov. Hardware
Слайд 30КРАТКОЕ РЕЗЮМЕ №3
Возможно сотрудничество:
В области целого ряда НИР/ОКР по робототехнике.
При проведении некоторых
КРАТКОЕ РЕЗЮМЕ №3
Возможно сотрудничество:
В области целого ряда НИР/ОКР по робототехнике.
При проведении некоторых
Слайд 31ИТОГ
Объект управления (датчики/сенсоры, исполнительные механизмы, модель управления) – КОНТРОЛЛЕР.
Связь/интерфейс между контроллером и
ИТОГ
Объект управления (датчики/сенсоры, исполнительные механизмы, модель управления) – КОНТРОЛЛЕР.
Связь/интерфейс между контроллером и
 География Выживания Проект визуального анализа
География Выживания Проект визуального анализа Закон Паскаля
Закон Паскаля Разработка и выбор стратегии развития организации
Разработка и выбор стратегии развития организации Об организации взаимодействия субъектов антинаркотической деятельности в Республики Карелия
Об организации взаимодействия субъектов антинаркотической деятельности в Республики Карелия Материалы для подготовки к контрольной работе по теме Греция
Материалы для подготовки к контрольной работе по теме Греция Социальный блоггер
Социальный блоггер Психическое развитие и деятельность
Психическое развитие и деятельность Фильм 451 градус по Фаренгейту
Фильм 451 градус по Фаренгейту Оригами
Оригами Открытка к 75 летию победы
Открытка к 75 летию победы Рост и развитие животных 6 класс
Рост и развитие животных 6 класс Фонд микрофинансирования Курганской области. Банк России
Фонд микрофинансирования Курганской области. Банк России Бизнес-план. Шаблон
Бизнес-план. Шаблон 5
5 Продається унікальний об’єкт в центральному районі Києва
Продається унікальний об’єкт в центральному районі Києва Урок презентация на тему Терпение и целеустремленность у великих географов
Урок презентация на тему Терпение и целеустремленность у великих географов  Метафоры непрерывного образования
Метафоры непрерывного образования Способы выработки беглого и выразительного чтения
Способы выработки беглого и выразительного чтения Презентация на тему Биологическое действие радиации (9 класс)
Презентация на тему Биологическое действие радиации (9 класс) Дистанционное обучение через Интернет. Обзор ресурсов. Анализ и классификация.
Дистанционное обучение через Интернет. Обзор ресурсов. Анализ и классификация. Адаптация первоклассников к школьному обучению
Адаптация первоклассников к школьному обучению Культура труда
Культура труда Народный костюм Воронежской губернии
Народный костюм Воронежской губернии Комерческое предложение Lord of the dance
Комерческое предложение Lord of the dance самообразование
самообразование Образовательная услуга и общественное благо
Образовательная услуга и общественное благо Париж
Париж Антонимы слова- «неприятели»
Антонимы слова- «неприятели»