- ÑÐµÐ¼Ð¸Ð½Ð°Ñ 1 дÐÑ Ð¡ÐÐ

Содержание
- 2. Учебные вопросы Принципы получения радиолокационной информации. Радиолокационные сигналы и их характеристики. Оптимальное обнаружение сигналов и измерение
- 3. Вопрос 1 Принципы получения радиолокационной информации
- 4. Основные определения радиолокации
- 5. Этапы получения радиолокационной информации
- 6. Основные положения: Информация получается за счет возмущения среды целью, в частности, за счет эффекта переизлучения целью
- 7. Эффективная поверхность рассеяния целей
- 8. Радиолокация с использованием вторичного излучения и переизлучения (ретрансляции) называется активной, а радиолокация с использованием собственного излучения
- 9. Время запаздывания отраженного сигнала относительно зондирующего для совмещенной РЛС определяется соотношением: tз = 2r/с. Принцип измерения
- 10. Измерение радиальной скорости Vr цели основано на эффекте Доплера: Отраженный от движущейся цели сигнал оказывается смещенным
- 11. Физическую основу радиолокационных методов измерения угловых координат цели составляют: прямолинейность распространения и направленность излучения и приема
- 12. Несущая частота f0 (длина волны λв ). Параметры зондирующего сигнала (ширина спектра ∆f0, длительность τс, период
- 13. Под тактическими характеристиками понимают характеристики, описывающие возможности практического использования РЛС. Основными тактическими характеристиками любой РЛС являются:
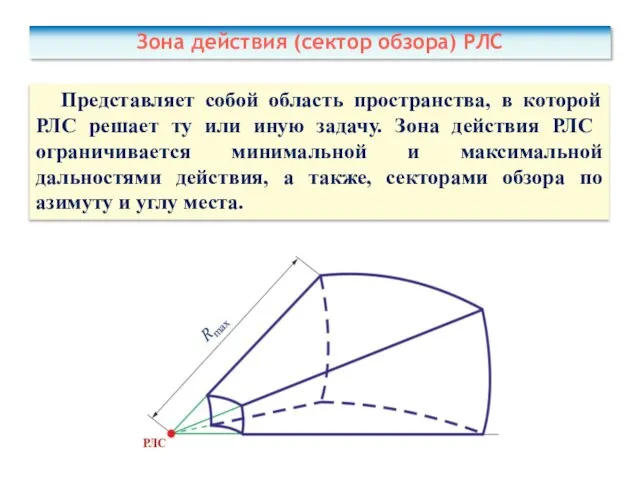
- 14. Представляет собой область пространства, в которой РЛС решает ту или иную задачу. Зона действия РЛС ограничивается
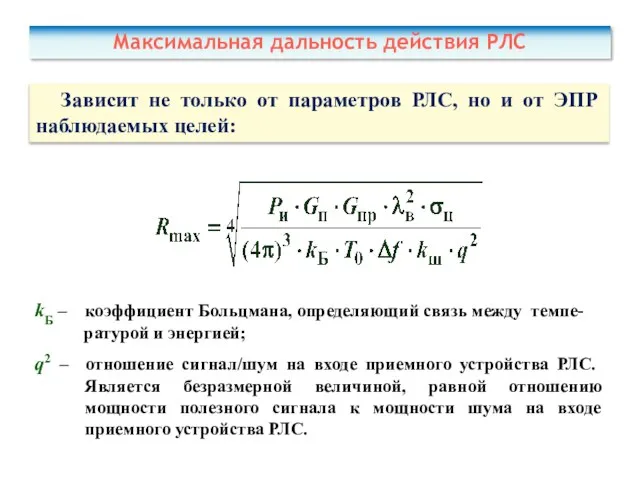
- 15. Зависит не только от параметров РЛС, но и от ЭПР наблюдаемых целей: Максимальная дальность действия РЛС
- 16. Способность РЛС осуществлять раздельное радиолокационное наблюдение целей. Разрешающая способность РЛС Определяется максимальным числом одновременно сопровождаемых целей
- 17. Способность РЛС сохранять свои тактико-технические характеристики в заданных допусках при определенных условиях эксплуатации. Оценивается надежность обычно
- 18. При решении задач получения и обработки радиолокационной информации используются следующие системы координат: 1. Географическая система координат
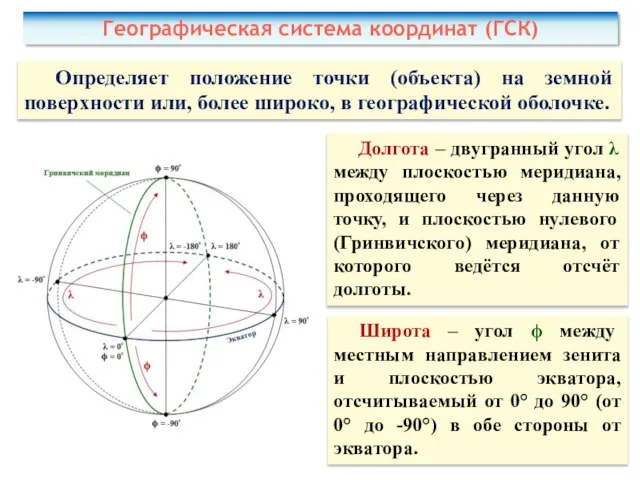
- 19. Географическая система координат (ГСК) Определяет положение точки (объекта) на земной поверхности или, более широко, в географической
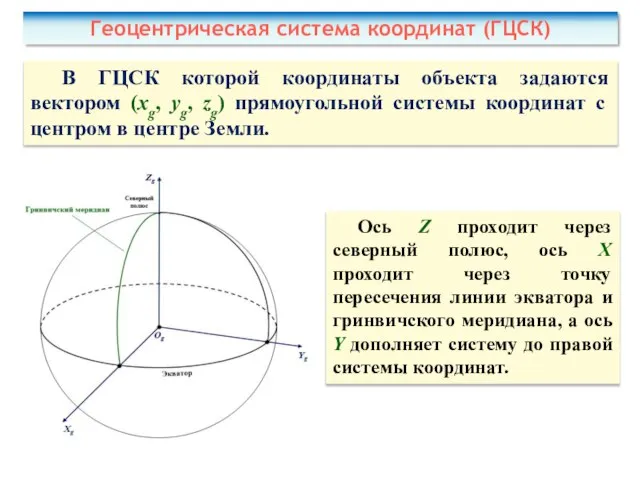
- 20. Геоцентрическая система координат (ГЦСК) В ГЦСК которой координаты объекта задаются вектором (xg, yg, zg) прямоугольной системы
- 21. Местные системы координат (МСК) Местными (топоцентрическими) системами координат (МСК) называют такие системы координат, начало которых находится
- 22. Местная прямоугольная система координат (МПСК) Система координат, центр которой находится в точке стояния РЛС, заданной географическими
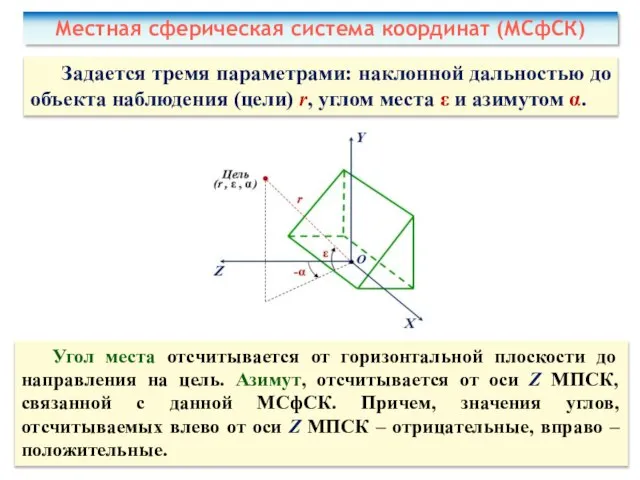
- 23. Местная сферическая система координат (МСфСК) Задается тремя параметрами: наклонной дальностью до объекта наблюдения (цели) r, углом
- 24. Антенные системы координат (АСК) Антенными системами координат (АСК) называют такие системы координат, начало отсчета, которых совмещено
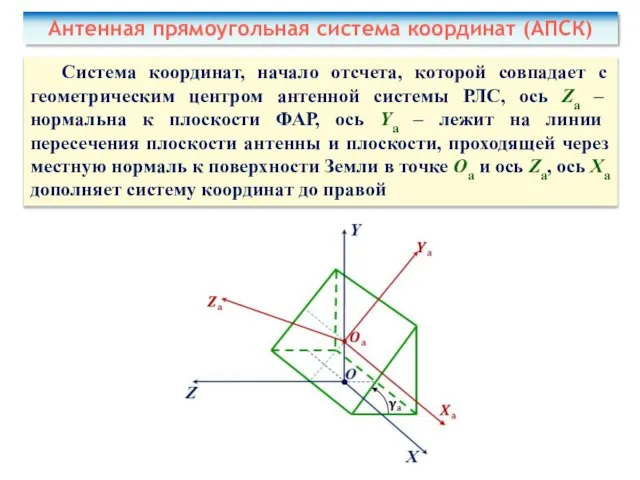
- 25. Антенная прямоугольная система координат (АПСК) Система координат, начало отсчета, которой совпадает с геометрическим центром антенной системы
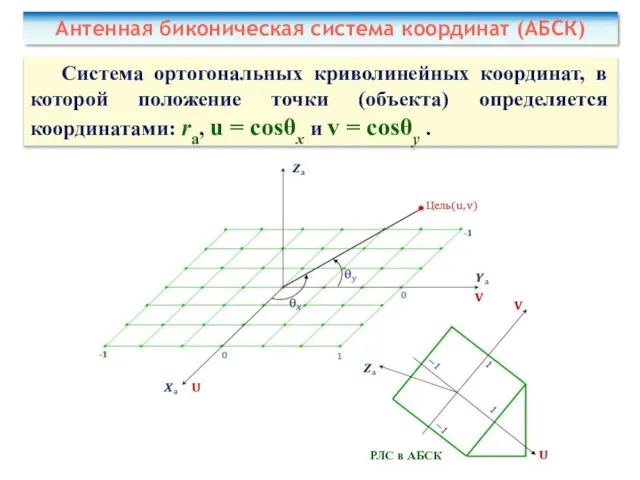
- 26. Антенная биконическая система координат (АБСК) Система ортогональных криволинейных координат, в которой положение точки (объекта) определяется координатами:
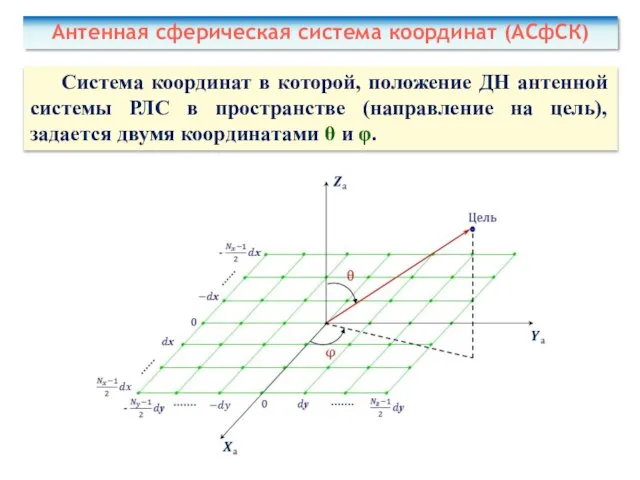
- 27. Антенная сферическая система координат (АСфСК) Система координат в которой, положение ДН антенной системы РЛС в пространстве
- 28. Вопрос 2 Радиолокационные сигналы и их характеристики
- 29. Под радиолокационным (зондирующим) сигналом в радиолокации понимают электромагнитную волну, излучаемую антенным устройством РЛС. В зависимости от
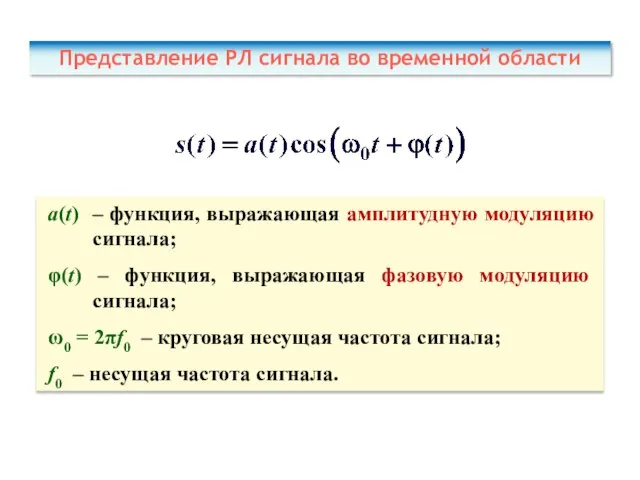
- 30. a(t) – функция, выражающая амплитудную модуляцию сигнала; φ(t) – функция, выражающая фазовую модуляцию сигнала; ω0 =
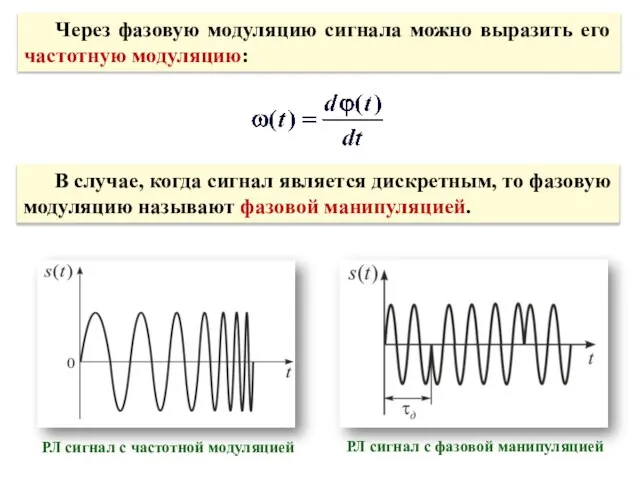
- 31. Через фазовую модуляцию сигнала можно выразить его частотную модуляцию: В случае, когда сигнал является дискретным, то
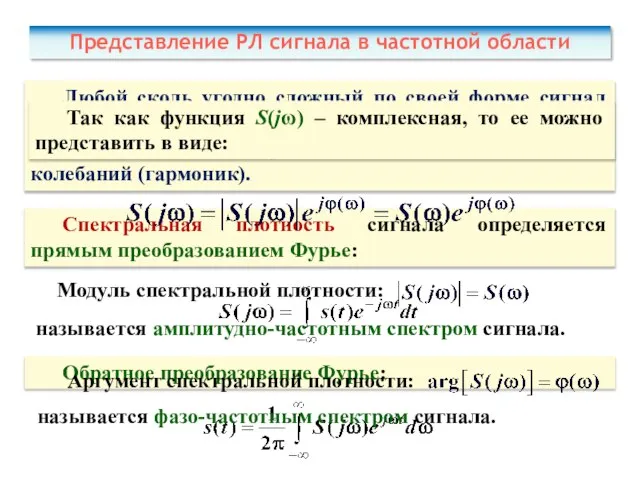
- 32. Представление РЛ сигнала в частотной области
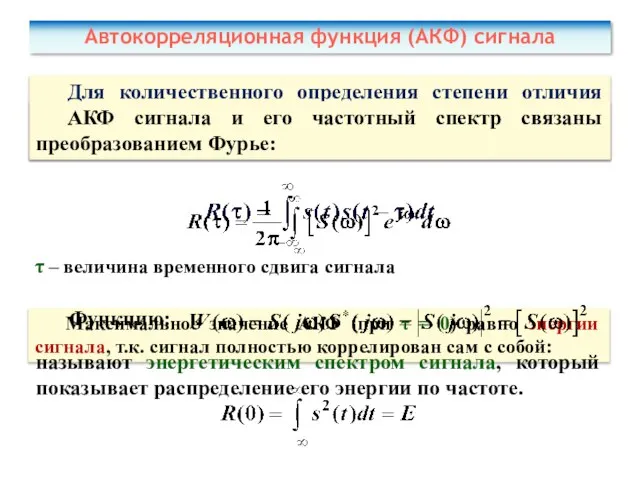
- 33. Автокорреляционная функция (АКФ) сигнала
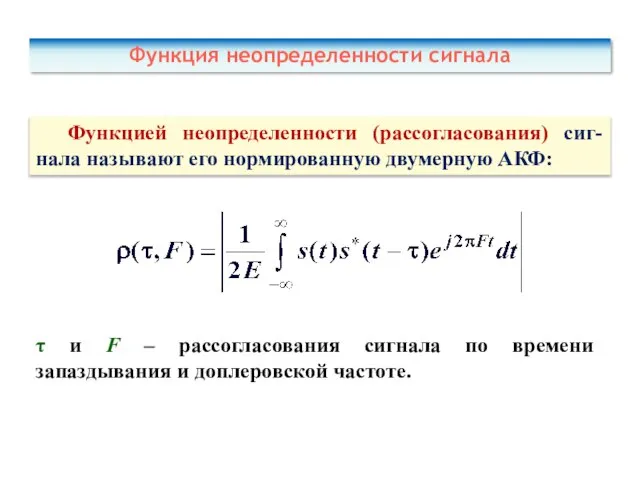
- 34. Функция неопределенности сигнала Функцией неопределенности (рассогласования) сиг-нала называют его нормированную двумерную АКФ: τ и F –
- 35. Геометрическое тело, ограниченное плоскостью и функцией неопределенности сигнала называют телом неопределенности сигнала. Тело неопределенности РЛ сигнала
- 36. Мощность сигнала P(t) Энергия сигнала Е Длительность сигнала τс , определяющая интервал времени, в течение которого
- 37. Прямоугольный радиоимпульс
- 38. Тело неопределенности ПРИ Функция неопределенности Тело неопределенности (ТН) Сечение ТН во временной области Сечение ТН в
- 39. Преимущества: простота генерации и обработки. Прямоугольный радиоимпульс Недостатки: невозможность обеспечить одновременно хорошее разрешение по дальности (для
- 40. Пачка прямоугольных радиоимпульсов Пачка прямоугольных радиоимпульсов (ППРИ) представляет собой сигнал, длительностью τп, состоящий из M прямоугольных
- 41. Пачка прямоугольных радиоимпульсов Частотный спектр ППРИ: Ширина спектра ППРИ: Функция неопределенности ППРИ: – функция неопределенности одного
- 42. Тело неопределенности ППРИ (M=4) Тело неопределенности (ТН) Сечение ТН во временной области Сечение ТН в частотной
- 43. Преимущества: пачечные сигналы обеспечивают существенно более высокую разрешающую способность по частоте (радиальной скорости). Пачка прямоугольных радиоимпульсов
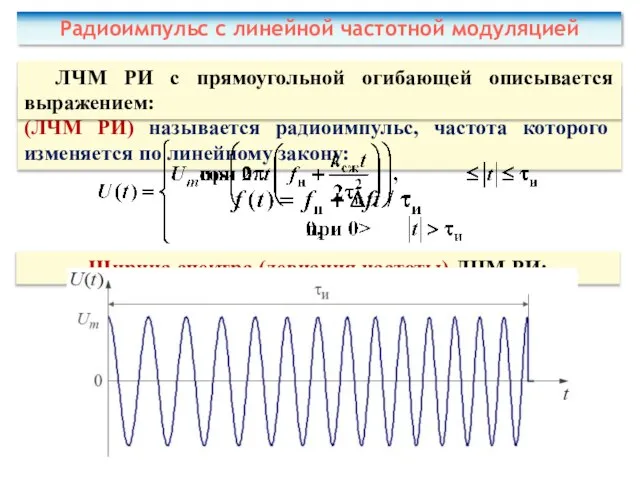
- 44. Радиоимпульс с линейной частотной модуляцией
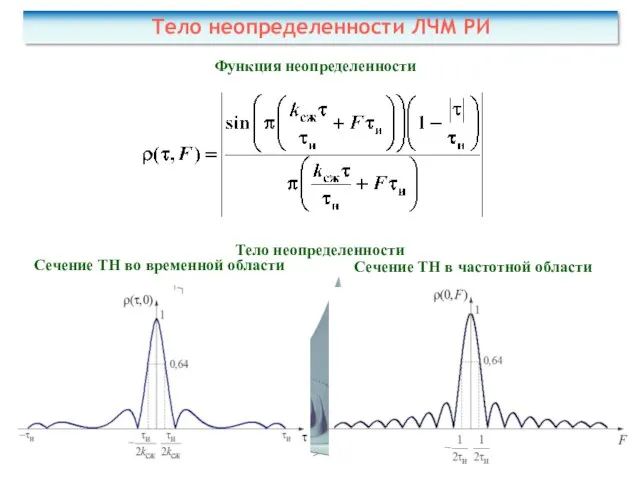
- 45. Тело неопределенности ЛЧМ РИ Функция неопределенности
- 46. Преимущества: в результате корреляционной обработки длительность ЛЧМ РИ уменьшается, что позволяет повысить точность измерений и разрешать
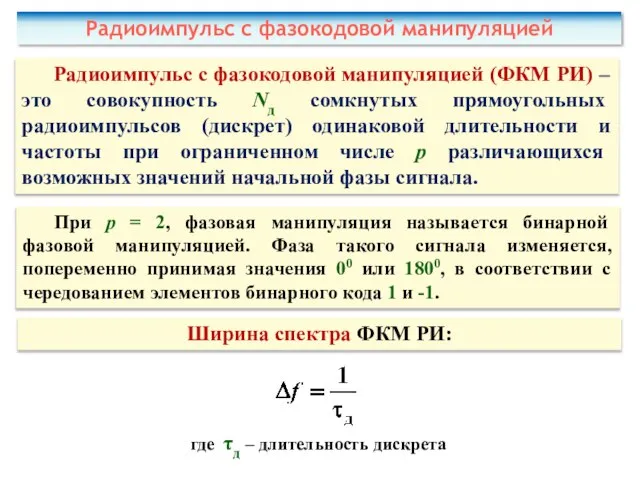
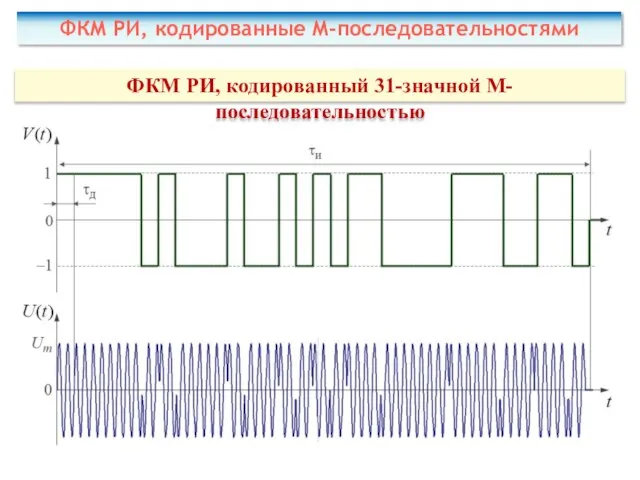
- 47. Радиоимпульс с фазокодовой манипуляцией Радиоимпульс с фазокодовой манипуляцией (ФКМ РИ) – это совокупность Nд сомкнутых прямоугольных
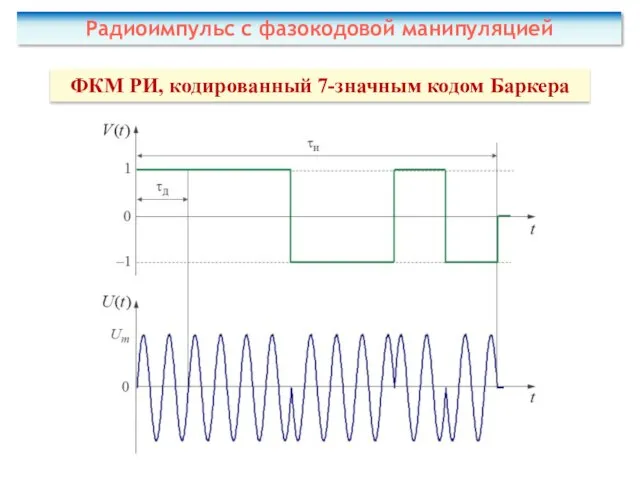
- 48. ФКМ РИ, кодированный 7-значным кодом Баркера Радиоимпульс с фазокодовой манипуляцией
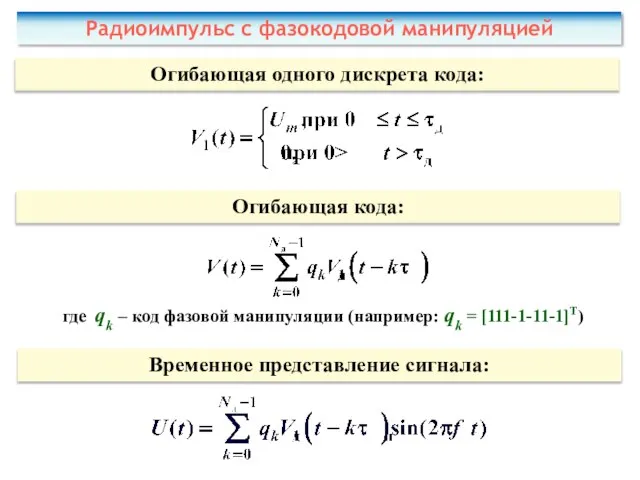
- 49. Радиоимпульс с фазокодовой манипуляцией Огибающая одного дискрета кода: Временное представление сигнала: где qk – код фазовой
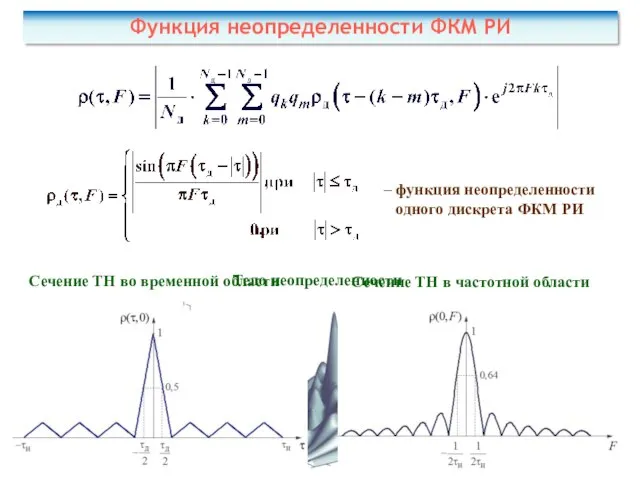
- 50. Функция неопределенности ФКМ РИ – функция неопределенности одного дискрета ФКМ РИ
- 51. ФКМ РИ, кодированный 31-значной М-последовательностью ФКМ РИ, кодированные М-последовательностями
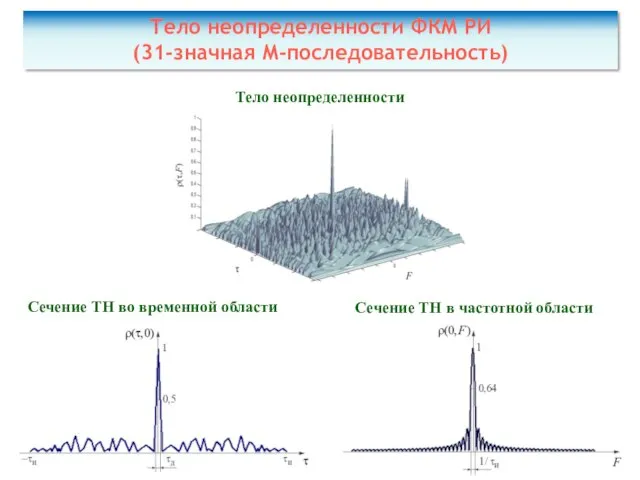
- 52. Тело неопределенности ФКМ РИ (31-значная М-последовательность) Тело неопределенности Сечение ТН во временной области Сечение ТН в
- 53. Преимущества: энергоемкость и высокая разрешающая способность одновременно по времени и по частоте (дальности и скорости). ФКМ
- 54. Вопрос 3 Оптимальное обнаружение сигналов и измерение их параметров
- 55. В результате процесса обнаружения должно быть выдано решение о наличии или отсутствии цели в произвольном разрешаемом
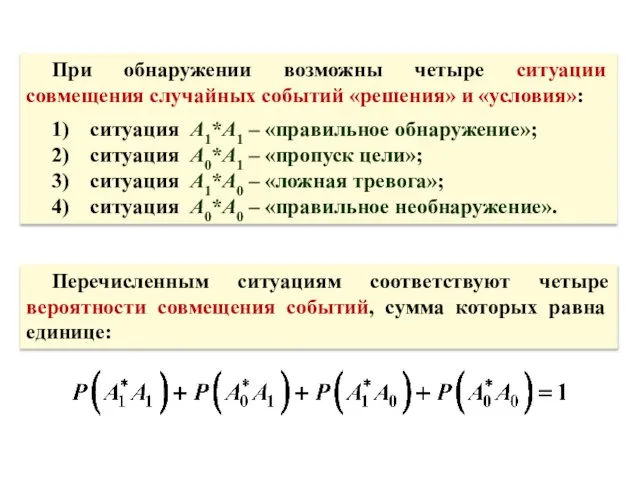
- 56. При обнаружении возможны четыре ситуации совмещения случайных событий «решения» и «условия»: 1) ситуация А1*А1 – «правильное
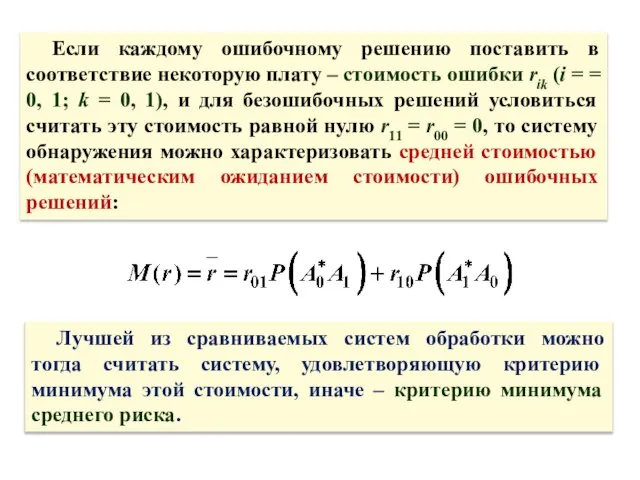
- 57. Если каждому ошибочному решению поставить в соответствие некоторую плату – стоимость ошибки rik (i = =
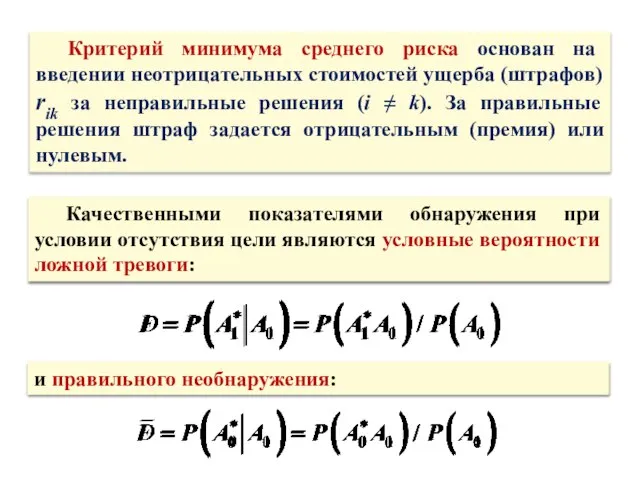
- 58. Критерий минимума среднего риска основан на введении неотрицательных стоимостей ущерба (штрафов) rik за неправильные решения (i
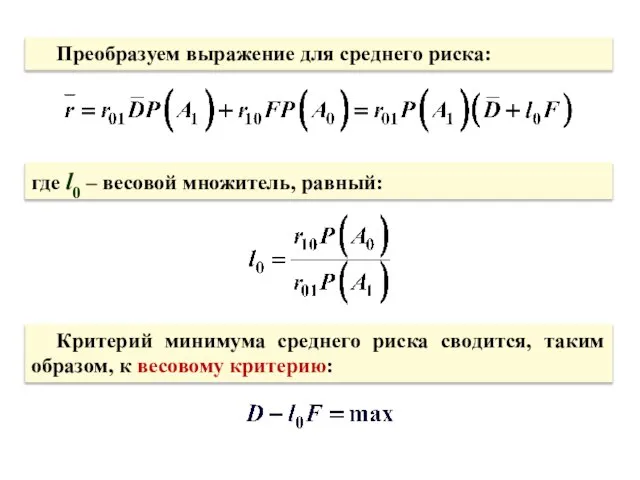
- 59. Преобразуем выражение для среднего риска: где l0 – весовой множитель, равный: Критерий минимума среднего риска сводится,
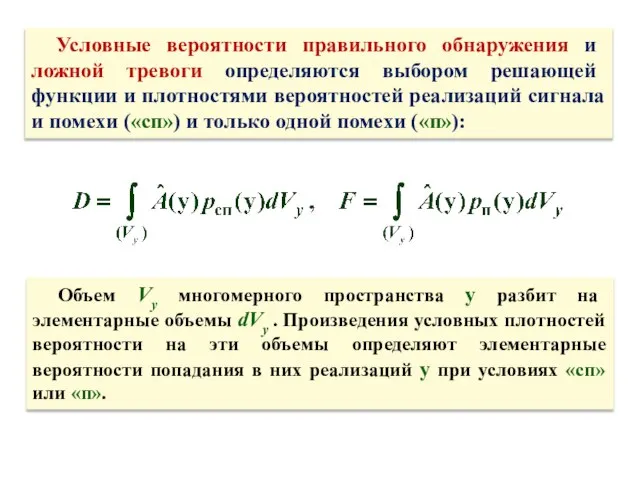
- 60. Условные вероятности правильного обнаружения и ложной тревоги определяются выбором решающей функции и плотностями вероятностей реализаций сигнала
- 61. Оптимальное решающее правило Отношение условных плотностей вероятностей как функций одной и той же принятой реализации у
- 62. Наряду с отношениями правдоподобия l вводятся их монотонно нарастающие функции s(l). Оптимизация обнаружения не нарушается, если
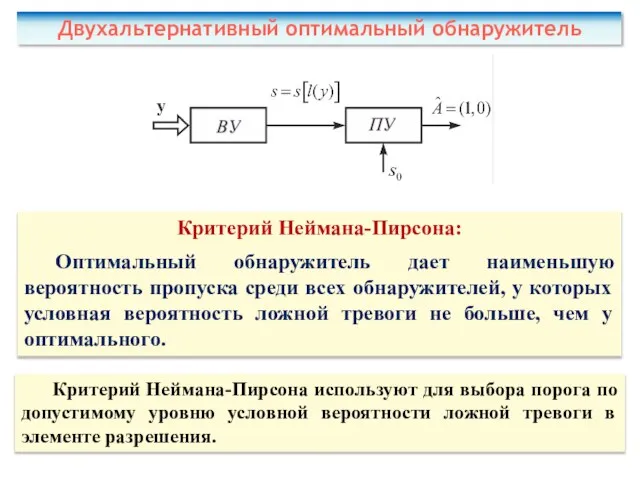
- 63. Двухальтернативный оптимальный обнаружитель Критерий Неймана-Пирсона: Оптимальный обнаружитель дает наименьшую вероятность пропуска среди всех обнаружителей, у которых
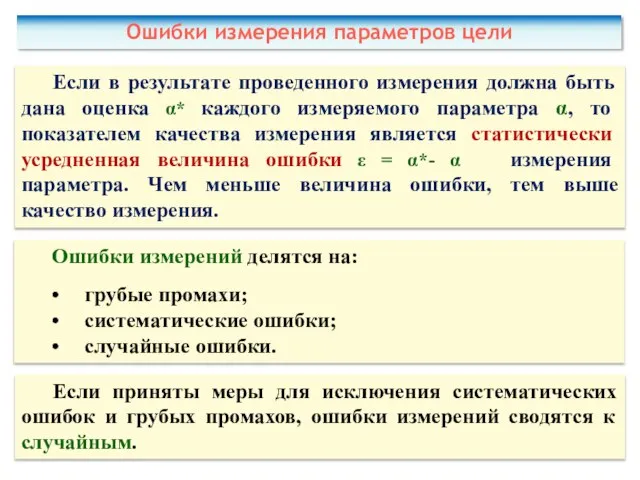
- 64. Ошибки измерения параметров цели Если в результате проведенного измерения должна быть дана оценка α* каждого измеряемого
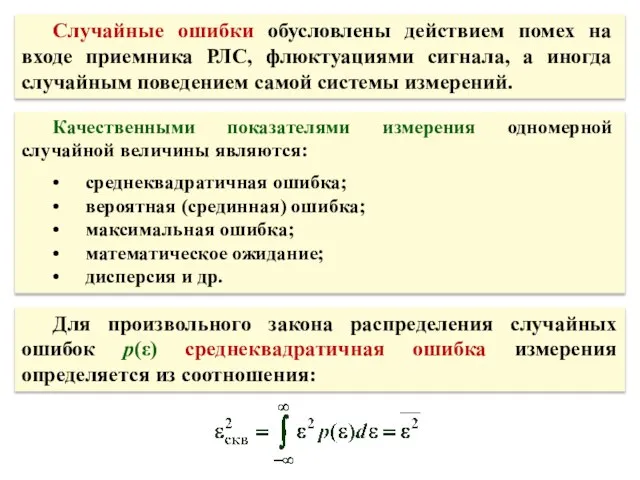
- 65. Для произвольного закона распределения случайных ошибок p(ε) среднеквадратичная ошибка измерения определяется из соотношения: Качественными показателями измерения
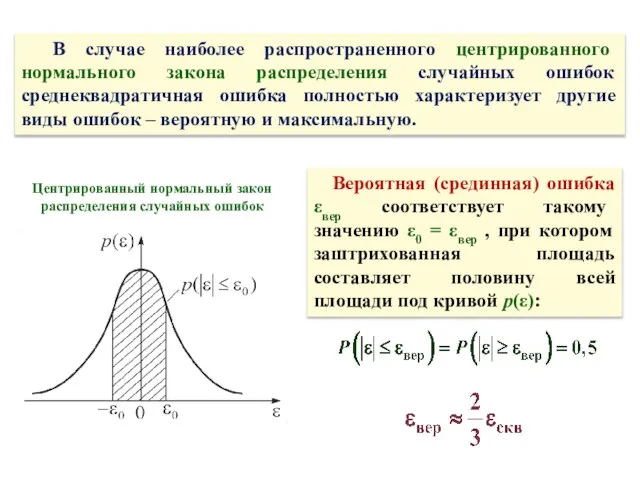
- 66. В случае наиболее распространенного центрированного нормального закона распределения случайных ошибок среднеквадратичная ошибка полностью характеризует другие виды
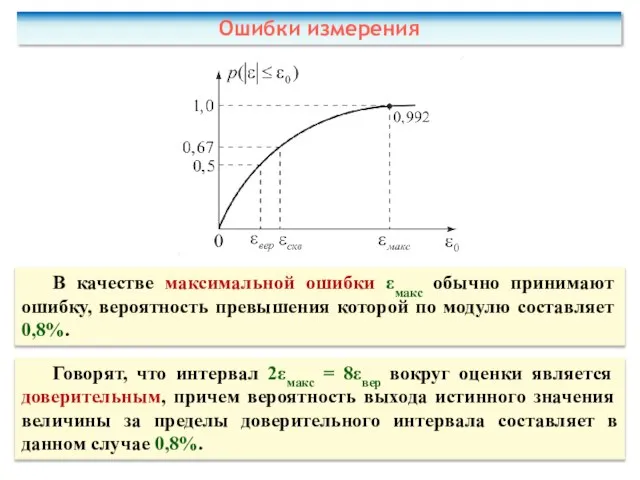
- 67. В качестве максимальной ошибки εмакс обычно принимают ошибку, вероятность превышения которой по модулю составляет 0,8%. Говорят,
- 68. Математическое ожидание ошибки M{ε} отлично от нуля, когда действует источник систематической ошибки. Оценку α* в этом
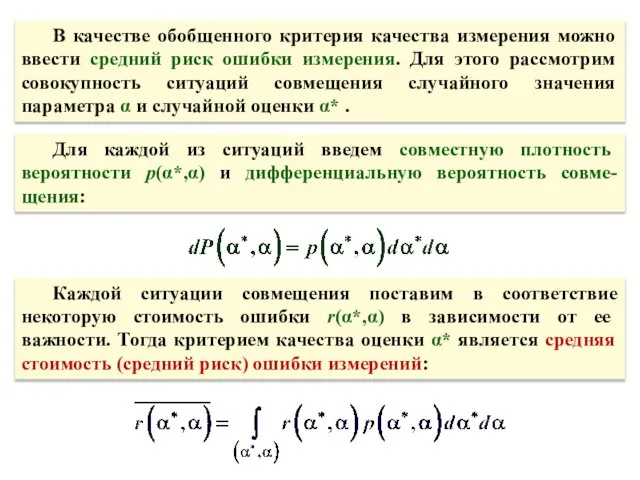
- 69. В качестве обобщенного критерия качества измерения можно ввести средний риск ошибки измерения. Для этого рассмотрим совокупность
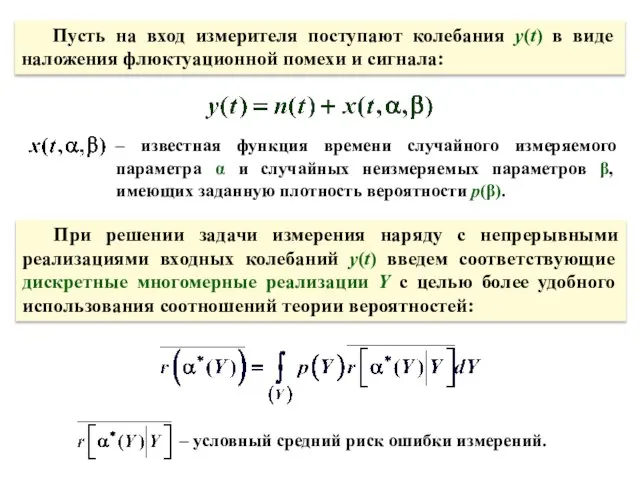
- 70. Пусть на вход измерителя поступают колебания у(t) в виде наложения флюктуационной помехи и сигнала: При решении
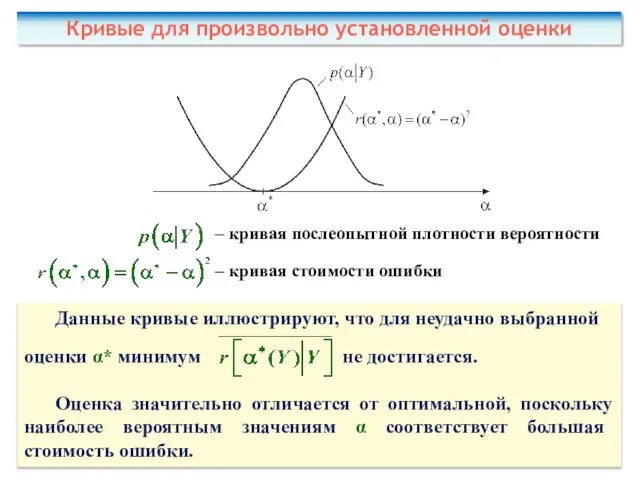
- 71. – кривая послеопытной плотности вероятности – кривая стоимости ошибки Кривые для произвольно установленной оценки Данные кривые
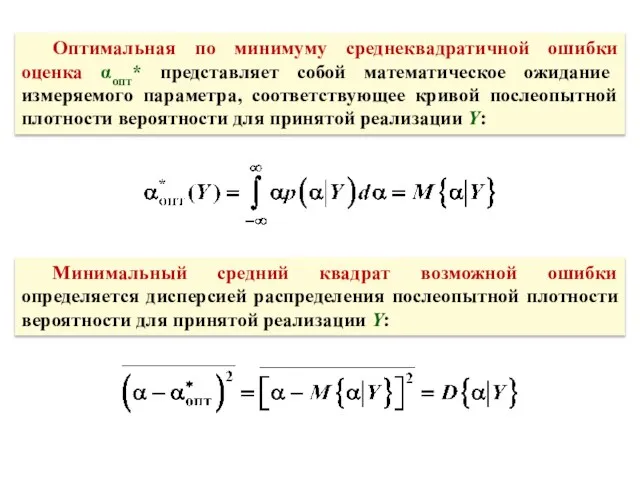
- 72. Оптимальная по минимуму среднеквадратичной ошибки оценка αопт* представляет собой математическое ожидание измеряемого параметра, соответствующее кривой послеопытной
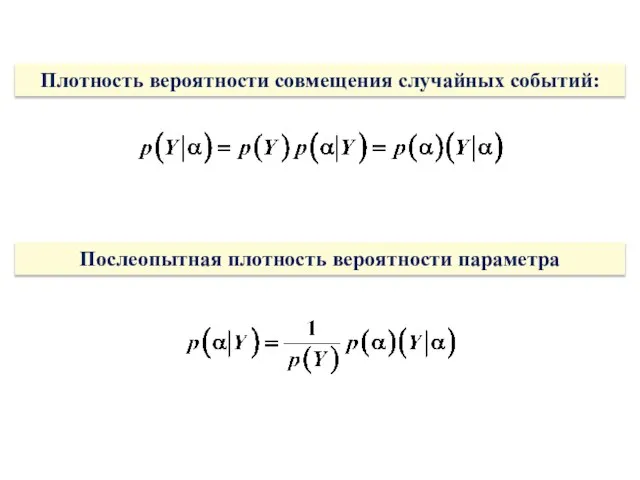
- 73. Плотность вероятности совмещения случайных событий: Послеопытная плотность вероятности параметра
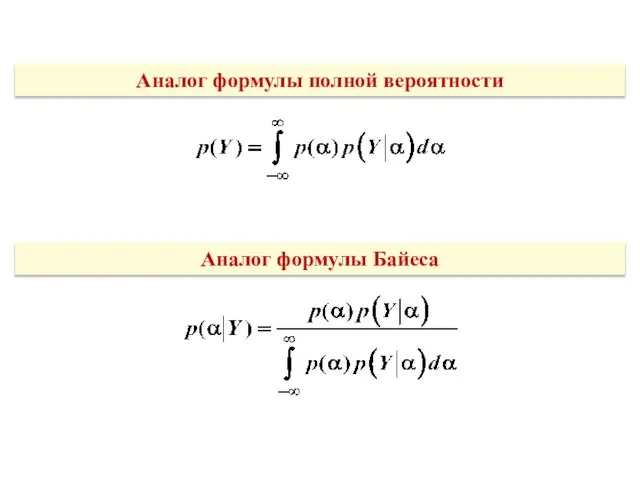
- 74. Аналог формулы полной вероятности Аналог формулы Байеса
- 75. Вопрос 4 Расчет характеристик радиолокационного обзора
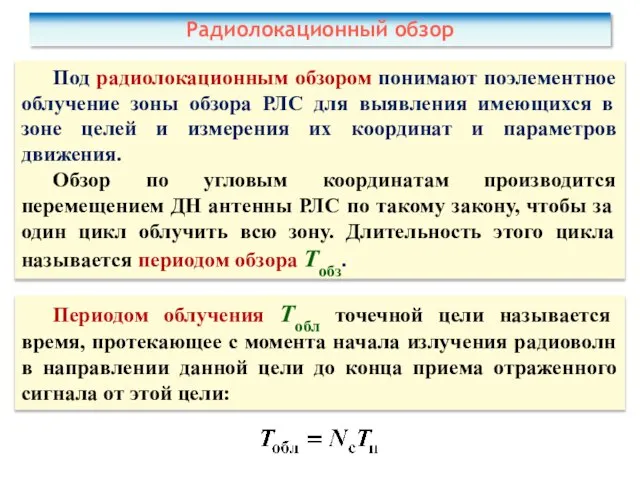
- 76. Под радиолокационным обзором понимают поэлементное облучение зоны обзора РЛС для выявления имеющихся в зоне целей и
- 77. Параллельный обзор одним неподвижным лучом ДН ФАР применяют в РЛС, измеряющих только дальность и, следовательно, не
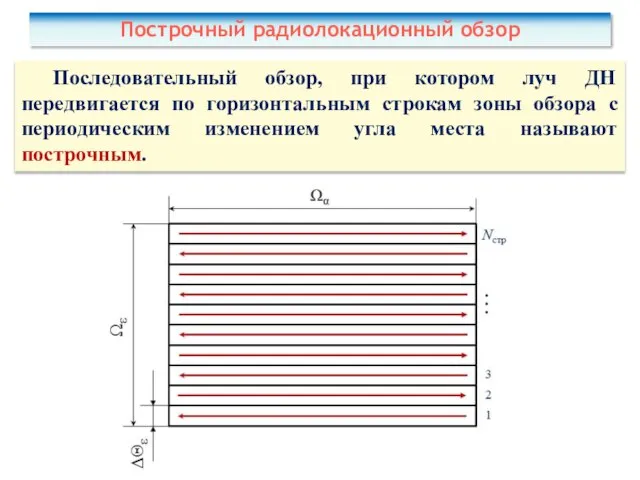
- 78. Последовательный обзор, при котором луч ДН передвигается по горизонтальным строкам зоны обзора с периодическим изменением угла
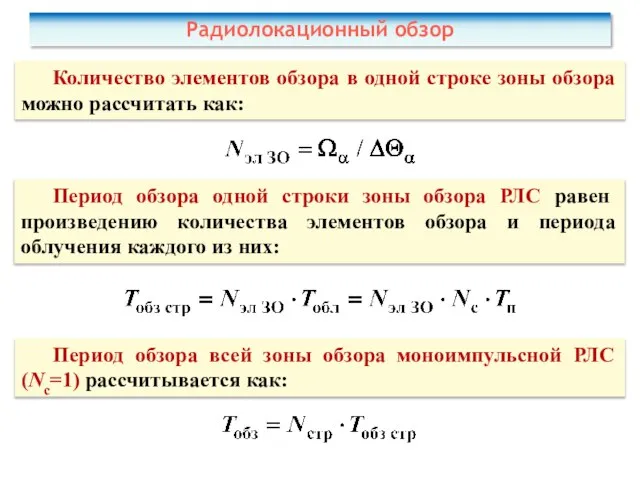
- 79. Количество элементов обзора в одной строке зоны обзора можно рассчитать как: Радиолокационный обзор Период обзора одной
- 80. Отработать материал занятия с использованием рекомендуемой литературы. Подготовиться к следующему занятию. Быть готовым к контрольному опросу
- 81. Чепурнов И.А., Серов С.А., Воротнюк Ю.С. Военно-техническая подготовка. Введение в специальность. – М.: Изд-во МГТУ им.
- 83. Скачать презентацию
Слайд 2Учебные вопросы
Принципы получения радиолокационной информации.
Радиолокационные сигналы и их характеристики.
Оптимальное обнаружение сигналов и
Учебные вопросы
Принципы получения радиолокационной информации.
Радиолокационные сигналы и их характеристики.
Оптимальное обнаружение сигналов и
Слайд 3Вопрос 1
Принципы получения радиолокационной информации
Вопрос 1
Принципы получения радиолокационной информации
Слайд 4Основные определения радиолокации
Основные определения радиолокации
Слайд 5Этапы получения радиолокационной информации
Этапы получения радиолокационной информации
Слайд 6Основные положения:
Информация получается за счет возмущения среды целью, в частности, за счет
Основные положения:
Информация получается за счет возмущения среды целью, в частности, за счет
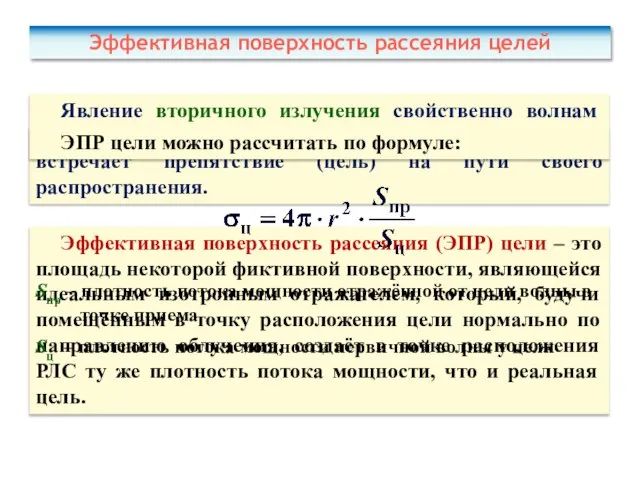
Слайд 7Эффективная поверхность рассеяния целей
Эффективная поверхность рассеяния целей
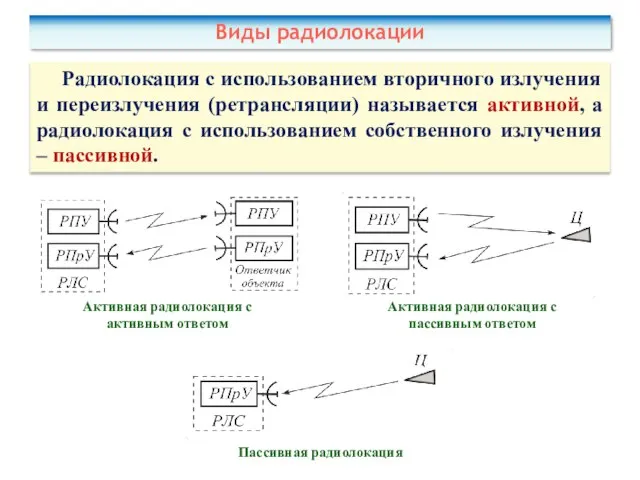
Слайд 8Радиолокация с использованием вторичного излучения и переизлучения (ретрансляции) называется активной, а радиолокация
Радиолокация с использованием вторичного излучения и переизлучения (ретрансляции) называется активной, а радиолокация
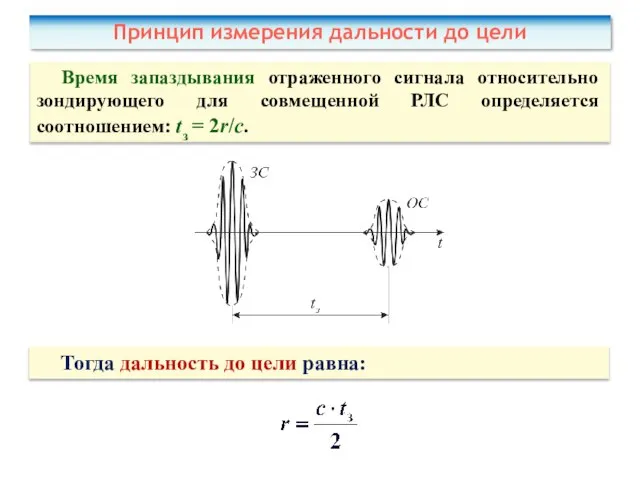
Слайд 9Время запаздывания отраженного сигнала относительно зондирующего для совмещенной РЛС определяется соотношением: tз
Время запаздывания отраженного сигнала относительно зондирующего для совмещенной РЛС определяется соотношением: tз
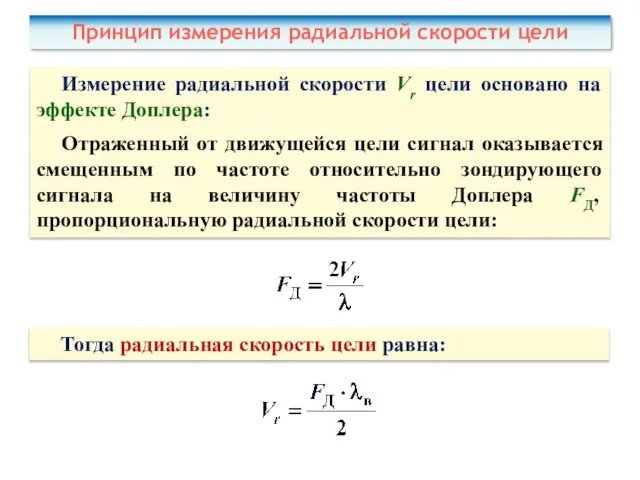
Слайд 10Измерение радиальной скорости Vr цели основано на эффекте Доплера:
Отраженный от движущейся цели
Измерение радиальной скорости Vr цели основано на эффекте Доплера:
Отраженный от движущейся цели
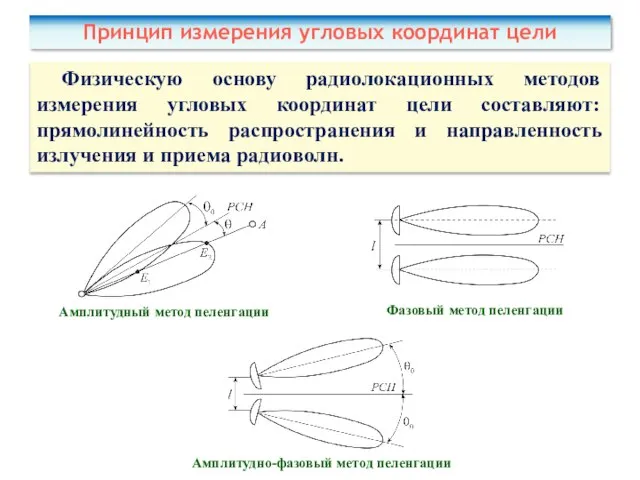
Слайд 11Физическую основу радиолокационных методов измерения угловых координат цели составляют: прямолинейность распространения и
Физическую основу радиолокационных методов измерения угловых координат цели составляют: прямолинейность распространения и
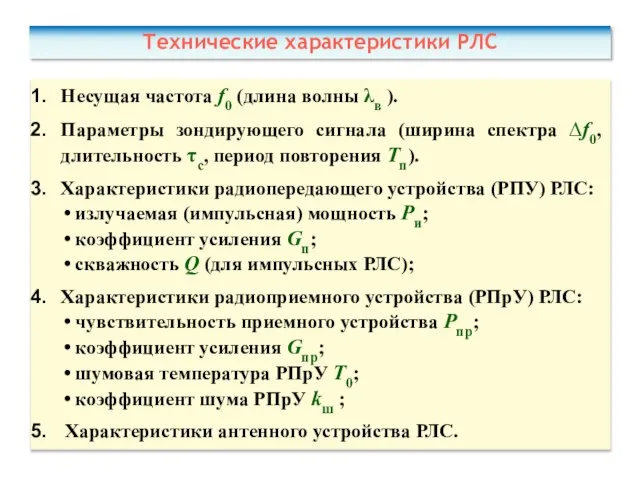
Слайд 12Несущая частота f0 (длина волны λв ).
Параметры зондирующего сигнала (ширина спектра ∆f0,
Несущая частота f0 (длина волны λв ).
Параметры зондирующего сигнала (ширина спектра ∆f0,
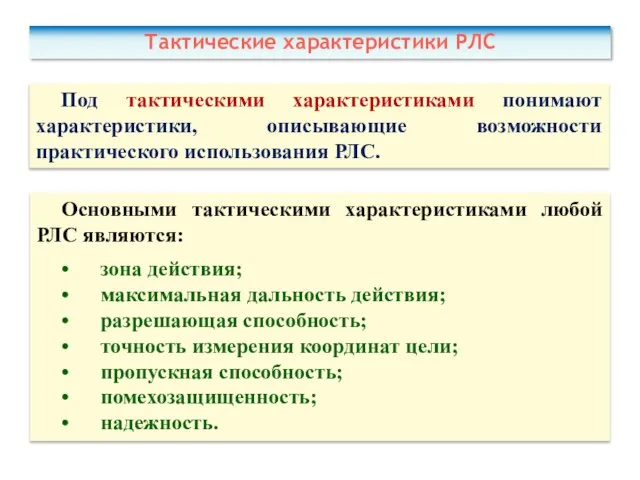
Слайд 13Под тактическими характеристиками понимают характеристики, описывающие возможности практического использования РЛС.
Основными тактическими характеристиками
Под тактическими характеристиками понимают характеристики, описывающие возможности практического использования РЛС.
Основными тактическими характеристиками
Слайд 14Представляет собой область пространства, в которой РЛС решает ту или иную задачу.
Представляет собой область пространства, в которой РЛС решает ту или иную задачу.
Слайд 15Зависит не только от параметров РЛС, но и от ЭПР наблюдаемых целей:
Максимальная
Зависит не только от параметров РЛС, но и от ЭПР наблюдаемых целей:
Максимальная
Слайд 16Способность РЛС осуществлять раздельное радиолокационное наблюдение целей.
Разрешающая способность РЛС
Определяется максимальным
Способность РЛС осуществлять раздельное радиолокационное наблюдение целей.
Разрешающая способность РЛС
Определяется максимальным
Слайд 17Способность РЛС сохранять свои тактико-технические характеристики в заданных допусках при определенных условиях
Способность РЛС сохранять свои тактико-технические характеристики в заданных допусках при определенных условиях
Слайд 18При решении задач получения и обработки радиолокационной информации используются следующие системы координат:
1.
При решении задач получения и обработки радиолокационной информации используются следующие системы координат:
1.
Слайд 19Географическая система координат (ГСК)
Определяет положение точки (объекта) на земной поверхности или, более
Географическая система координат (ГСК)
Определяет положение точки (объекта) на земной поверхности или, более
Слайд 20Геоцентрическая система координат (ГЦСК)
В ГЦСК которой координаты объекта задаются вектором (xg, yg,
Геоцентрическая система координат (ГЦСК)
В ГЦСК которой координаты объекта задаются вектором (xg, yg,
Слайд 21Местные системы координат (МСК)
Местными (топоцентрическими) системами координат (МСК) называют такие системы координат,
Местные системы координат (МСК)
Местными (топоцентрическими) системами координат (МСК) называют такие системы координат,
Слайд 22Местная прямоугольная система координат (МПСК)
Система координат, центр которой находится в точке стояния
Местная прямоугольная система координат (МПСК)
Система координат, центр которой находится в точке стояния

Слайд 23Местная сферическая система координат (МСфСК)
Задается тремя параметрами: наклонной дальностью до объекта наблюдения
Местная сферическая система координат (МСфСК)
Задается тремя параметрами: наклонной дальностью до объекта наблюдения
Слайд 24Антенные системы координат (АСК)
Антенными системами координат (АСК) называют такие системы координат, начало
Антенные системы координат (АСК)
Антенными системами координат (АСК) называют такие системы координат, начало
Слайд 25Антенная прямоугольная система координат (АПСК)
Система координат, начало отсчета, которой совпадает с геометрическим
Антенная прямоугольная система координат (АПСК)
Система координат, начало отсчета, которой совпадает с геометрическим
Слайд 26Антенная биконическая система координат (АБСК)
Система ортогональных криволинейных координат, в которой положение точки
Антенная биконическая система координат (АБСК)
Система ортогональных криволинейных координат, в которой положение точки
Слайд 27Антенная сферическая система координат (АСфСК)
Система координат в которой, положение ДН антенной системы
Антенная сферическая система координат (АСфСК)
Система координат в которой, положение ДН антенной системы
Слайд 28Вопрос 2
Радиолокационные сигналы и их характеристики
Вопрос 2
Радиолокационные сигналы и их характеристики
Слайд 29Под радиолокационным (зондирующим) сигналом в радиолокации понимают электромагнитную волну, излучаемую антенным устройством
Под радиолокационным (зондирующим) сигналом в радиолокации понимают электромагнитную волну, излучаемую антенным устройством
Слайд 30a(t) – функция, выражающая амплитудную модуляцию сигнала;
φ(t) – функция, выражающая фазовую модуляцию
a(t) – функция, выражающая амплитудную модуляцию сигнала;
φ(t) – функция, выражающая фазовую модуляцию
Слайд 31Через фазовую модуляцию сигнала можно выразить его частотную модуляцию:
В случае, когда сигнал
Через фазовую модуляцию сигнала можно выразить его частотную модуляцию:
В случае, когда сигнал
Слайд 32Представление РЛ сигнала в частотной области
Представление РЛ сигнала в частотной области
Слайд 33Автокорреляционная функция (АКФ) сигнала
Автокорреляционная функция (АКФ) сигнала
Слайд 34Функция неопределенности сигнала
Функцией неопределенности (рассогласования) сиг-нала называют его нормированную двумерную АКФ:
τ и
Функция неопределенности сигнала
Функцией неопределенности (рассогласования) сиг-нала называют его нормированную двумерную АКФ:
τ и
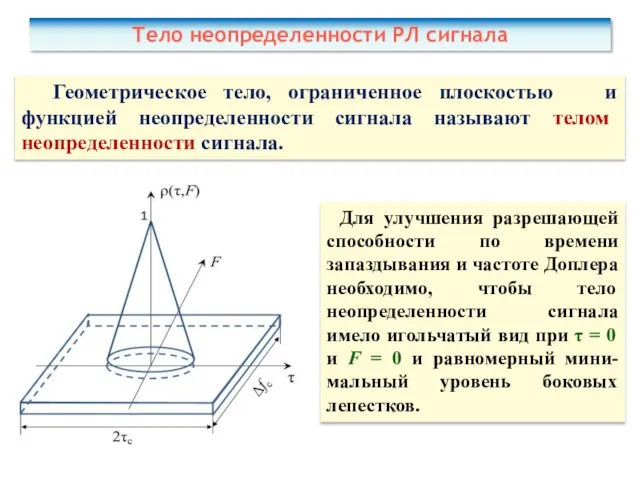
Слайд 35Геометрическое тело, ограниченное плоскостью и функцией неопределенности сигнала называют телом неопределенности сигнала.
Тело
Геометрическое тело, ограниченное плоскостью и функцией неопределенности сигнала называют телом неопределенности сигнала.
Тело
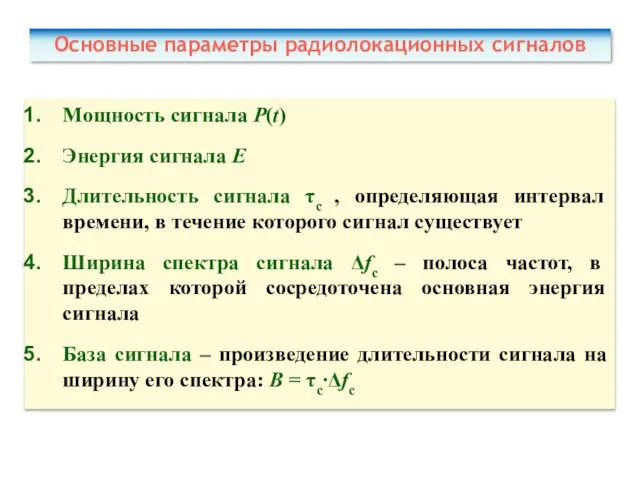
Слайд 36Мощность сигнала P(t)
Энергия сигнала Е
Длительность сигнала τс , определяющая интервал времени, в
Мощность сигнала P(t)
Энергия сигнала Е
Длительность сигнала τс , определяющая интервал времени, в
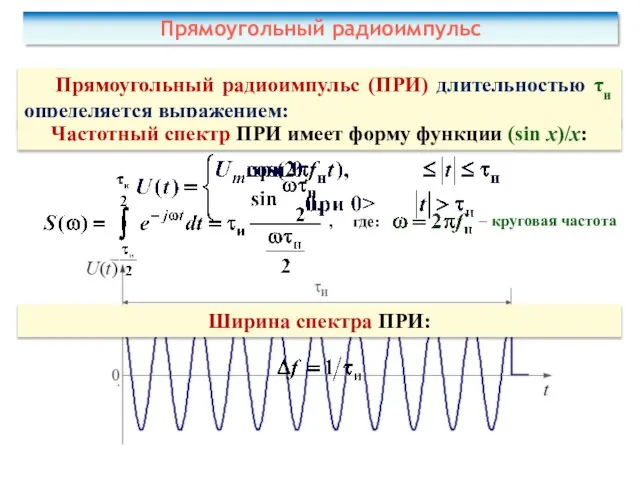
Слайд 37Прямоугольный радиоимпульс
Прямоугольный радиоимпульс
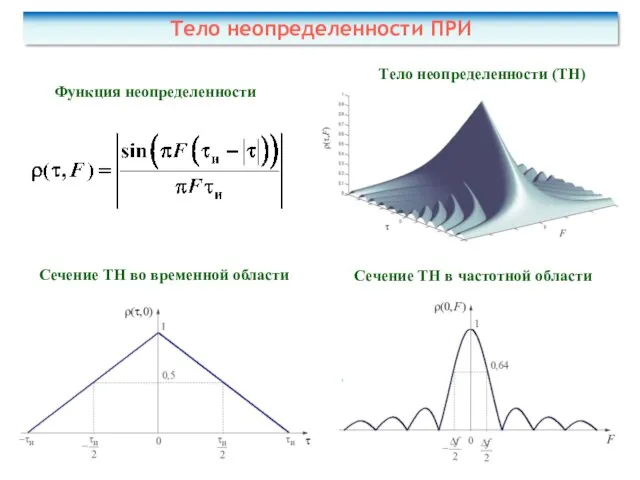
Слайд 38Тело неопределенности ПРИ
Функция неопределенности
Тело неопределенности (ТН)
Сечение ТН во временной области
Сечение ТН
Тело неопределенности ПРИ
Функция неопределенности
Тело неопределенности (ТН)
Сечение ТН во временной области
Сечение ТН
Слайд 39Преимущества: простота генерации и обработки.
Прямоугольный радиоимпульс
Недостатки: невозможность обеспечить одновременно хорошее разрешение
Преимущества: простота генерации и обработки.
Прямоугольный радиоимпульс
Недостатки: невозможность обеспечить одновременно хорошее разрешение
Слайд 40Пачка прямоугольных радиоимпульсов
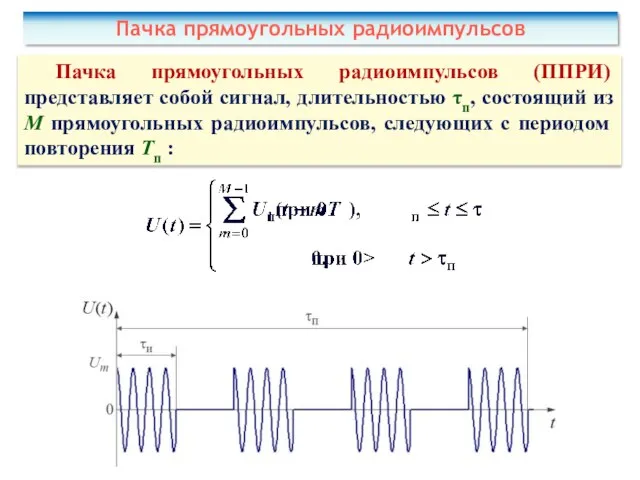
Пачка прямоугольных радиоимпульсов (ППРИ) представляет собой сигнал, длительностью τп, состоящий
Пачка прямоугольных радиоимпульсов
Пачка прямоугольных радиоимпульсов (ППРИ) представляет собой сигнал, длительностью τп, состоящий
Слайд 41Пачка прямоугольных радиоимпульсов
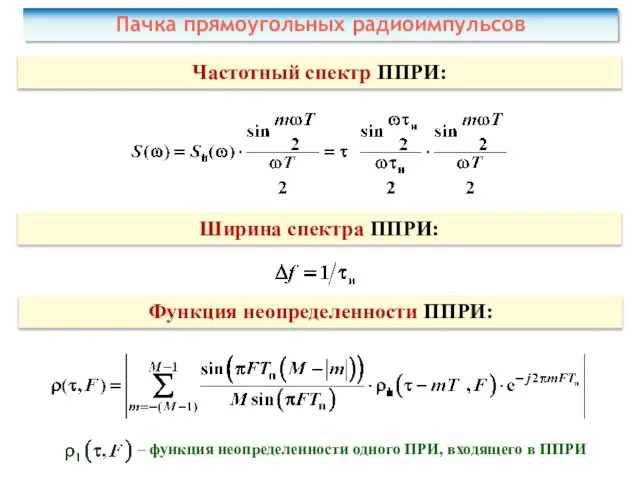
Частотный спектр ППРИ:
Ширина спектра ППРИ:
Функция неопределенности ППРИ:
– функция неопределенности одного
Пачка прямоугольных радиоимпульсов
Частотный спектр ППРИ:
Ширина спектра ППРИ:
Функция неопределенности ППРИ:
– функция неопределенности одного
Слайд 42Тело неопределенности ППРИ (M=4)
Тело неопределенности (ТН)
Сечение ТН во временной области
Сечение ТН
Тело неопределенности ППРИ (M=4)
Тело неопределенности (ТН)
Сечение ТН во временной области
Сечение ТН
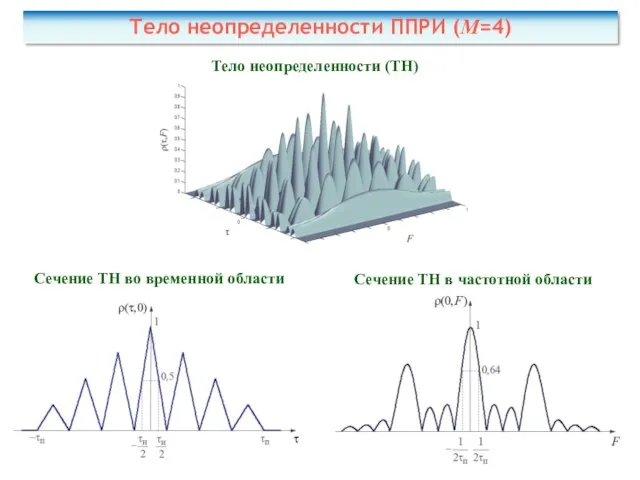
Слайд 43Преимущества: пачечные сигналы обеспечивают существенно более высокую разрешающую способность по частоте (радиальной
Преимущества: пачечные сигналы обеспечивают существенно более высокую разрешающую способность по частоте (радиальной
Слайд 44Радиоимпульс с линейной частотной модуляцией
Радиоимпульс с линейной частотной модуляцией
Слайд 45Тело неопределенности ЛЧМ РИ
Функция неопределенности
Тело неопределенности ЛЧМ РИ
Функция неопределенности
Слайд 46Преимущества: в результате корреляционной обработки длительность ЛЧМ РИ уменьшается, что позволяет повысить
Преимущества: в результате корреляционной обработки длительность ЛЧМ РИ уменьшается, что позволяет повысить
Слайд 47Радиоимпульс с фазокодовой манипуляцией
Радиоимпульс с фазокодовой манипуляцией (ФКМ РИ) – это совокупность
Радиоимпульс с фазокодовой манипуляцией
Радиоимпульс с фазокодовой манипуляцией (ФКМ РИ) – это совокупность
Слайд 48ФКМ РИ, кодированный 7-значным кодом Баркера
Радиоимпульс с фазокодовой манипуляцией
ФКМ РИ, кодированный 7-значным кодом Баркера
Радиоимпульс с фазокодовой манипуляцией
Слайд 49Радиоимпульс с фазокодовой манипуляцией
Огибающая одного дискрета кода:
Временное представление сигнала:
где qk – код
Радиоимпульс с фазокодовой манипуляцией
Огибающая одного дискрета кода:
Временное представление сигнала:
где qk – код
Слайд 50Функция неопределенности ФКМ РИ
– функция неопределенности
одного дискрета ФКМ РИ
Функция неопределенности ФКМ РИ
– функция неопределенности
одного дискрета ФКМ РИ
Слайд 51ФКМ РИ, кодированный 31-значной М-последовательностью
ФКМ РИ, кодированные М-последовательностями
ФКМ РИ, кодированный 31-значной М-последовательностью
ФКМ РИ, кодированные М-последовательностями
Слайд 52Тело неопределенности ФКМ РИ
(31-значная М-последовательность)
Тело неопределенности
Сечение ТН во временной области
Сечение ТН в
Тело неопределенности ФКМ РИ
(31-значная М-последовательность)
Тело неопределенности
Сечение ТН во временной области
Сечение ТН в
Слайд 53Преимущества: энергоемкость и высокая разрешающая способность одновременно по времени и по частоте
Преимущества: энергоемкость и высокая разрешающая способность одновременно по времени и по частоте
Слайд 54Вопрос 3
Оптимальное обнаружение сигналов и измерение их параметров
Вопрос 3
Оптимальное обнаружение сигналов и измерение их параметров
Слайд 55В результате процесса обнаружения должно быть выдано решение о наличии или отсутствии
В результате процесса обнаружения должно быть выдано решение о наличии или отсутствии
Слайд 56При обнаружении возможны четыре ситуации совмещения случайных событий «решения» и «условия»:
1) ситуация А1*А1
При обнаружении возможны четыре ситуации совмещения случайных событий «решения» и «условия»:
1) ситуация А1*А1
Слайд 57Если каждому ошибочному решению поставить в соответствие некоторую плату – стоимость ошибки
Если каждому ошибочному решению поставить в соответствие некоторую плату – стоимость ошибки
Слайд 58Критерий минимума среднего риска основан на введении неотрицательных стоимостей ущерба (штрафов) rik
Критерий минимума среднего риска основан на введении неотрицательных стоимостей ущерба (штрафов) rik
Слайд 59Преобразуем выражение для среднего риска:
где l0 – весовой множитель, равный:
Критерий минимума среднего
Преобразуем выражение для среднего риска:
где l0 – весовой множитель, равный:
Критерий минимума среднего
Слайд 60Условные вероятности правильного обнаружения и ложной тревоги определяются выбором решающей функции и
Условные вероятности правильного обнаружения и ложной тревоги определяются выбором решающей функции и
Слайд 61Оптимальное решающее правило
Отношение условных плотностей вероятностей как функций одной и той же
Оптимальное решающее правило
Отношение условных плотностей вероятностей как функций одной и той же
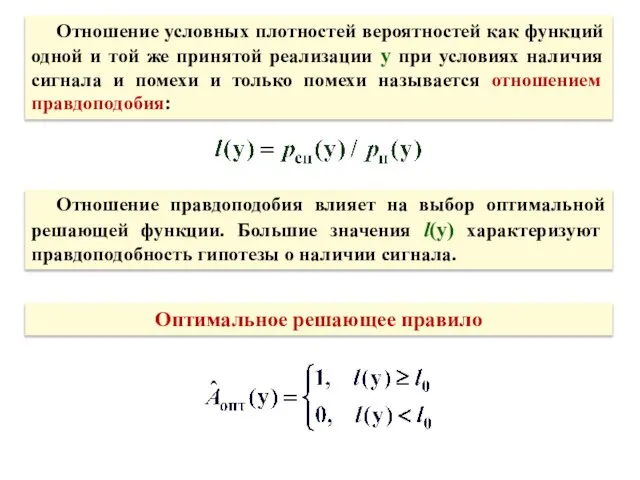
Слайд 62Наряду с отношениями правдоподобия l вводятся их монотонно нарастающие функции s(l). Оптимизация
Наряду с отношениями правдоподобия l вводятся их монотонно нарастающие функции s(l). Оптимизация

Слайд 63Двухальтернативный оптимальный обнаружитель
Критерий Неймана-Пирсона:
Оптимальный обнаружитель дает наименьшую вероятность пропуска среди всех
Двухальтернативный оптимальный обнаружитель
Критерий Неймана-Пирсона:
Оптимальный обнаружитель дает наименьшую вероятность пропуска среди всех
Слайд 64Ошибки измерения параметров цели
Если в результате проведенного измерения должна быть дана
Ошибки измерения параметров цели
Если в результате проведенного измерения должна быть дана
Слайд 65Для произвольного закона распределения случайных ошибок p(ε) среднеквадратичная ошибка измерения определяется из
Для произвольного закона распределения случайных ошибок p(ε) среднеквадратичная ошибка измерения определяется из
Слайд 66В случае наиболее распространенного центрированного нормального закона распределения случайных ошибок среднеквадратичная ошибка
В случае наиболее распространенного центрированного нормального закона распределения случайных ошибок среднеквадратичная ошибка
Слайд 67В качестве максимальной ошибки εмакс обычно принимают ошибку, вероятность превышения которой по
В качестве максимальной ошибки εмакс обычно принимают ошибку, вероятность превышения которой по
Слайд 68Математическое ожидание ошибки M{ε} отлично от нуля, когда действует источник систематической ошибки.
Математическое ожидание ошибки M{ε} отлично от нуля, когда действует источник систематической ошибки.
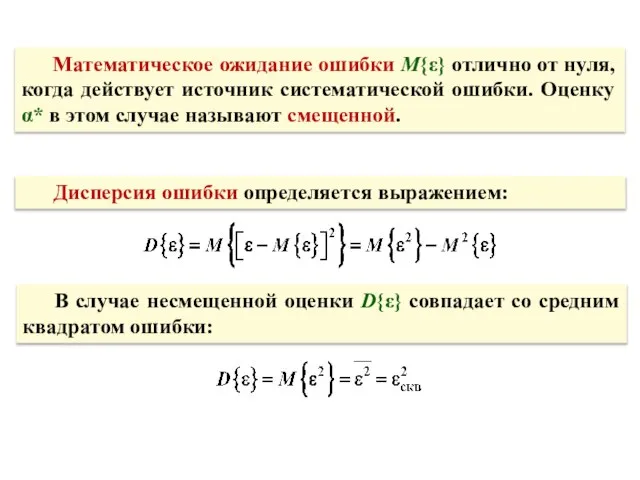
Слайд 69В качестве обобщенного критерия качества измерения можно ввести средний риск ошибки измерения.
В качестве обобщенного критерия качества измерения можно ввести средний риск ошибки измерения.
Слайд 70Пусть на вход измерителя поступают колебания у(t) в виде наложения флюктуационной помехи
Пусть на вход измерителя поступают колебания у(t) в виде наложения флюктуационной помехи
Слайд 71– кривая послеопытной плотности вероятности
– кривая стоимости ошибки
Кривые для произвольно
– кривая послеопытной плотности вероятности
– кривая стоимости ошибки
Кривые для произвольно
Слайд 72Оптимальная по минимуму среднеквадратичной ошибки оценка αопт* представляет собой математическое ожидание измеряемого
Оптимальная по минимуму среднеквадратичной ошибки оценка αопт* представляет собой математическое ожидание измеряемого
Слайд 73Плотность вероятности совмещения случайных событий:
Послеопытная плотность вероятности параметра
Плотность вероятности совмещения случайных событий:
Послеопытная плотность вероятности параметра
Слайд 74Аналог формулы полной вероятности
Аналог формулы Байеса
Аналог формулы полной вероятности
Аналог формулы Байеса
Слайд 75Вопрос 4
Расчет характеристик радиолокационного обзора
Вопрос 4
Расчет характеристик радиолокационного обзора
Слайд 76Под радиолокационным обзором понимают поэлементное облучение зоны обзора РЛС для выявления имеющихся
Под радиолокационным обзором понимают поэлементное облучение зоны обзора РЛС для выявления имеющихся
Слайд 77Параллельный обзор одним неподвижным лучом ДН ФАР применяют в РЛС, измеряющих только
Параллельный обзор одним неподвижным лучом ДН ФАР применяют в РЛС, измеряющих только
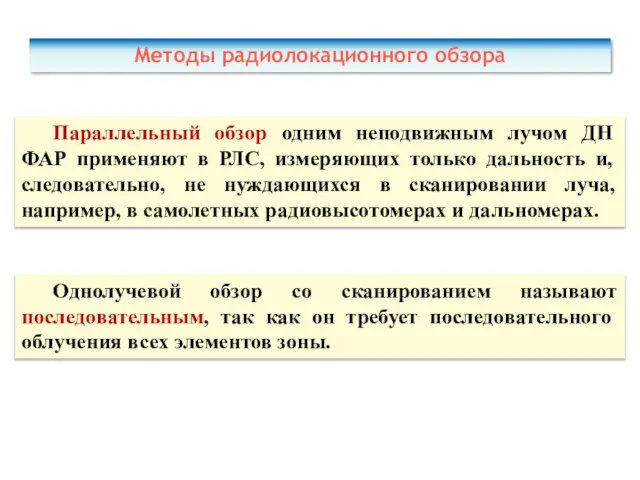
Слайд 78Последовательный обзор, при котором луч ДН передвигается по горизонтальным строкам зоны обзора
Последовательный обзор, при котором луч ДН передвигается по горизонтальным строкам зоны обзора
Слайд 79Количество элементов обзора в одной строке зоны обзора можно рассчитать как:
Радиолокационный обзор
Период
Количество элементов обзора в одной строке зоны обзора можно рассчитать как:
Радиолокационный обзор
Период
Слайд 80Отработать материал занятия с использованием рекомендуемой литературы.
Подготовиться к следующему занятию.
Быть готовым к
Отработать материал занятия с использованием рекомендуемой литературы.
Подготовиться к следующему занятию.
Быть готовым к
Слайд 81Чепурнов И.А., Серов С.А., Воротнюк Ю.С. Военно-техническая подготовка. Введение в специальность. –
Чепурнов И.А., Серов С.А., Воротнюк Ю.С. Военно-техническая подготовка. Введение в специальность. –
 Изделия для ландшафтного дизайна
Изделия для ландшафтного дизайна Презентация на тему С Днём матери
Презентация на тему С Днём матери Предложите детям хлопать в ладоши (топать ногой, ударять по коленкам, поднимать руку вверх...) тогда, когда они услышат слова, с зад
Предложите детям хлопать в ладоши (топать ногой, ударять по коленкам, поднимать руку вверх...) тогда, когда они услышат слова, с зад Популяционнаягенетика - 6
Популяционнаягенетика - 6 Музей. 3 класс
Музей. 3 класс Список наиболее значимых конкурсов исследовательских и проектных работ учащихся в 2011-2012 уч. г.
Список наиболее значимых конкурсов исследовательских и проектных работ учащихся в 2011-2012 уч. г. Гостевой Дом Диамонд
Гостевой Дом Диамонд Акция «Рождественские колокола»
Акция «Рождественские колокола» Cистема курсовой устойчивости ESP1
Cистема курсовой устойчивости ESP1 Презентация_Владимир_11 октября
Презентация_Владимир_11 октября Инновации в образовательном процессе: использование современных информационных технологий управления в рамках обучения по эконо
Инновации в образовательном процессе: использование современных информационных технологий управления в рамках обучения по эконо Понятие права. Правовая норма. Источники права
Понятие права. Правовая норма. Источники права Урок преподавателя химии Смирновой Л.Н.. «Урок это солнце, вокруг которого, как планеты, вращаются все формы учебных занятий» Н.М. Ве
Урок преподавателя химии Смирновой Л.Н.. «Урок это солнце, вокруг которого, как планеты, вращаются все формы учебных занятий» Н.М. Ве Бизнес-план ShengYou
Бизнес-план ShengYou Презентация на тему Топливно-энергетический комплекс (ТЭК)
Презентация на тему Топливно-энергетический комплекс (ТЭК) Презентация на тему Valentine’s Day
Презентация на тему Valentine’s Day Презентация на тему Рождество 6 класс
Презентация на тему Рождество 6 класс  Национальное блюдо Болгарии Гювеч
Национальное блюдо Болгарии Гювеч ИНДИВИДУАЛЬНЫЕ ГИГИЕНИЧЕСКИЕ ТАПОЧКИ
ИНДИВИДУАЛЬНЫЕ ГИГИЕНИЧЕСКИЕ ТАПОЧКИ В техникуме прошёл Чемпионат по играмWarcraft Dota и Flatout 2
В техникуме прошёл Чемпионат по играмWarcraft Dota и Flatout 2 Расстояния до звёзд
Расстояния до звёзд Бажов Павел Петрович. Уральские сказы
Бажов Павел Петрович. Уральские сказы Методы анализа, используемые при проектировании логистических систем
Методы анализа, используемые при проектировании логистических систем Фламбирование десертных блюд
Фламбирование десертных блюд Моя семья
Моя семья МБОУ
МБОУ Введение в разработку под Kinect
Введение в разработку под Kinect «Нахождение числа по его дроби»
«Нахождение числа по его дроби»