- Обнаружение свободных мест на парковке с помощью камеры видеонаблюдения и фреймворка Intel OpenVINO

Содержание
- 2. Цели Создать решение, которое упрощало бы навигацию по парковке, с указанием конкретного свободного места. Обеспечение конкурентоспособности
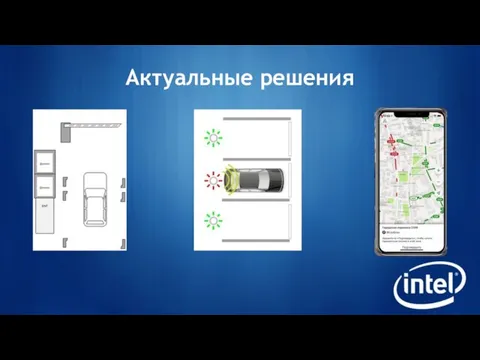
- 3. Актуальные решения
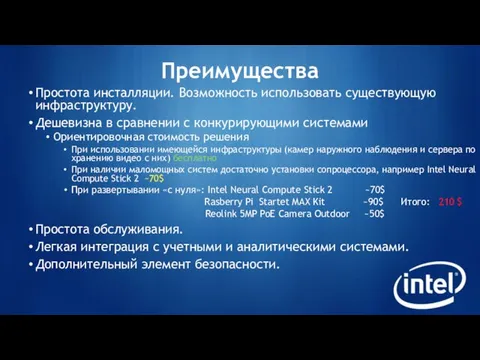
- 4. Преимущества Простота инсталляции. Возможность использовать существующую инфраструктуру. Дешевизна в сравнении с конкурирующими системами Ориентировочная стоимость решения
- 5. Постановка задачи Изучить инструмент OpenVINO и ознакомиться с предобученными моделями предоставляемыми разработчиками компании Intel. Разработка системы
- 6. Обнаружение парковочных мест. Разметка парковки вручную.
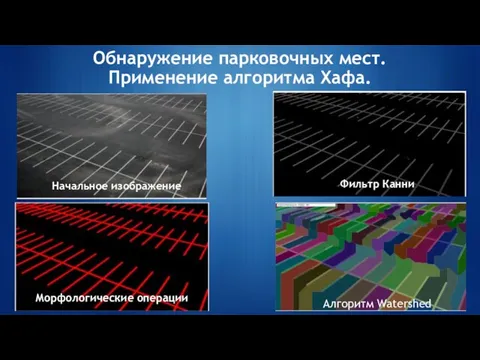
- 7. Обнаружение парковочных мест. Применение алгоритма Хафа. Начальное изображение Фильтр Канни Морфологические операции Алгоритм Watershed
- 8. Определение занятости слота. Использовалась предобученная модель из набора OpenVINO person-vehicle-bike-detection-crossroad-1016 Сеть MobileNetV2 + на основе SSD
- 9. Определение занятости слота. Intersection Over Union (отношение площади пересечения к сумме площадей) или IoU. IoU можно
- 10. Результаты
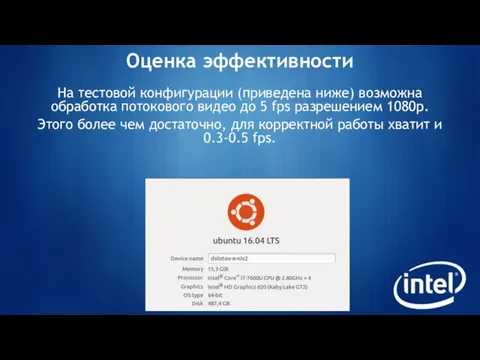
- 11. Оценка эффективности На тестовой конфигурации (приведена ниже) возможна обработка потокового видео до 5 fps разрешением 1080р.
- 13. Скачать презентацию
Слайд 2Цели
Создать решение, которое упрощало бы навигацию по парковке, с указанием конкретного свободного
Цели
Создать решение, которое упрощало бы навигацию по парковке, с указанием конкретного свободного
Слайд 3Актуальные решения
Актуальные решения
Слайд 4Преимущества
Простота инсталляции. Возможность использовать существующую инфраструктуру.
Дешевизна в сравнении с конкурирующими системами
Ориентировочная стоимость
Преимущества
Простота инсталляции. Возможность использовать существующую инфраструктуру.
Дешевизна в сравнении с конкурирующими системами
Ориентировочная стоимость
Слайд 5Постановка задачи
Изучить инструмент OpenVINO и ознакомиться с предобученными моделями предоставляемыми разработчиками компании
Постановка задачи
Изучить инструмент OpenVINO и ознакомиться с предобученными моделями предоставляемыми разработчиками компании
Слайд 6Обнаружение парковочных мест.
Разметка парковки вручную.
Обнаружение парковочных мест.
Разметка парковки вручную.

Слайд 7Обнаружение парковочных мест.
Применение алгоритма Хафа.
Начальное изображение
Фильтр Канни
Морфологические операции
Алгоритм Watershed
Обнаружение парковочных мест.
Применение алгоритма Хафа.
Начальное изображение
Фильтр Канни
Морфологические операции
Алгоритм Watershed
Слайд 8Определение занятости слота.
Использовалась предобученная модель из набора OpenVINO
person-vehicle-bike-detection-crossroad-1016
Сеть MobileNetV2 + на основе
Определение занятости слота.
Использовалась предобученная модель из набора OpenVINO
person-vehicle-bike-detection-crossroad-1016
Сеть MobileNetV2 + на основе

Слайд 9Определение занятости слота.
Intersection Over Union (отношение площади пересечения к сумме площадей) или
Определение занятости слота.
Intersection Over Union (отношение площади пересечения к сумме площадей) или

Слайд 10Результаты
Результаты

Слайд 11Оценка эффективности
На тестовой конфигурации (приведена ниже) возможна обработка потокового видео до 5
Оценка эффективности
На тестовой конфигурации (приведена ниже) возможна обработка потокового видео до 5
 Презентация на тему Древнейшие люди
Презентация на тему Древнейшие люди Вода как жизнь
Вода как жизнь Классификация проектов
Классификация проектов Государство как управляющая система
Государство как управляющая система КАК УСТРОЕНЫ ЭЛЕМЕНТЫ ПИТАНИЯ?
КАК УСТРОЕНЫ ЭЛЕМЕНТЫ ПИТАНИЯ? Охрана животных (3 класс)
Охрана животных (3 класс) Problems of the environment
Problems of the environment Презентация на тему Рынок труда
Презентация на тему Рынок труда  Содержание и организация контрольно-оценочной деятельности в 5-6-х классах РО(проблемная лекция)
Содержание и организация контрольно-оценочной деятельности в 5-6-х классах РО(проблемная лекция) Продвижение товара на рынок
Продвижение товара на рынок Marketing. Management. Quan niệm Marketing
Marketing. Management. Quan niệm Marketing «Модели информатизации: формы использования ИКТ в процессе изучения учебных предметов,
«Модели информатизации: формы использования ИКТ в процессе изучения учебных предметов, Выпуск печатного издания «Наш мир» и оказание полиграфических услуг населению
Выпуск печатного издания «Наш мир» и оказание полиграфических услуг населению Envisioning Cards
Envisioning Cards Напорные станционные водоводы. Лекция 19
Напорные станционные водоводы. Лекция 19 7
7 Святки. Святочные обряды
Святки. Святочные обряды Особенности судебного толкования
Особенности судебного толкования 11 класс-это МЫ
11 класс-это МЫ Click to edit Master title style Click to edit Master subtitle style
Click to edit Master title style Click to edit Master subtitle style  Детская лыжная поляна
Детская лыжная поляна Методы прерывания беременности
Методы прерывания беременности Пасха. Христос Воскрес
Пасха. Христос Воскрес Национальный проект образование и его реализация в Астраханской области
Национальный проект образование и его реализация в Астраханской области Закон сохранения энергии в тепловых процессах
Закон сохранения энергии в тепловых процессах «ВЗАИМОСВЯЗЬ ИНТЕЛЛЕКТА И РЕЗУЛЬТАТИВНОСТИ СПОРТИВНЫХ ДЕЙСТВИЙ»
«ВЗАИМОСВЯЗЬ ИНТЕЛЛЕКТА И РЕЗУЛЬТАТИВНОСТИ СПОРТИВНЫХ ДЕЙСТВИЙ» Бихевиоризм. Основатель бихевиоризма
Бихевиоризм. Основатель бихевиоризма Презентация на тему Александро-Невская Лавра
Презентация на тему Александро-Невская Лавра