- Определение точек поворотов пальцев при создании шаблона ладони

Содержание
- 2. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 3. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 4. Задача распознавания формы ладони бинарное изображение ладони граничное представление ...
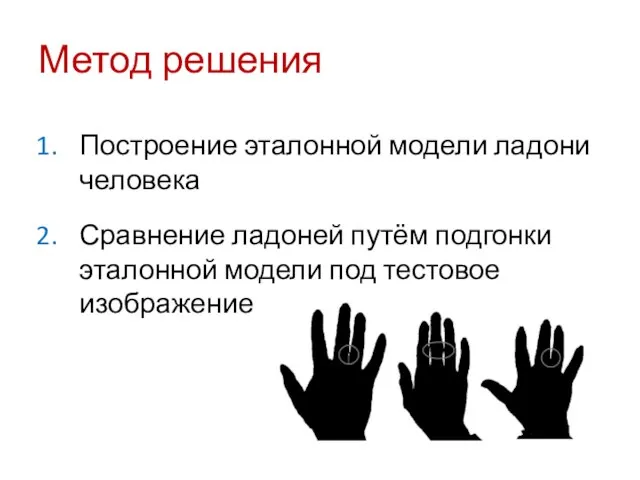
- 5. Метод решения Построение эталонной модели ладони человека Сравнение ладоней путём подгонки эталонной модели под тестовое изображение
- 6. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 7. Гибкий объект Семейство кругов C={ct,t∊T} – циркулярный граф Объединение кругов (как точечных множеств) S=⋃ct, t∊T –
- 8. Трансформации Основные движения сдвиг ладони поворот ладони поворот пальцев Допустимые трансформации сдвиг циркулярного графа поворот циркулярного
- 9. Разметка ладони Основные шаги Выделение пальцев Определение точек поворотов пальцев Обозначения кончики: P1, P2, P3, P4
- 10. Сравнение формы ладоней Эталонная ладонь G1 Тестовая ладонь G2
- 11. Сравнение формы ладоней Совмещение кончиков средних пальцев (точка P3) Совмещение осей средних пальцев (прямая P3R3) Исключение
- 12. Подгонка Площадь ладони в среднем – 40000 пикселей Эталонная ладонь G1 Тестовая ладонь G2 Начальное совмещение
- 13. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
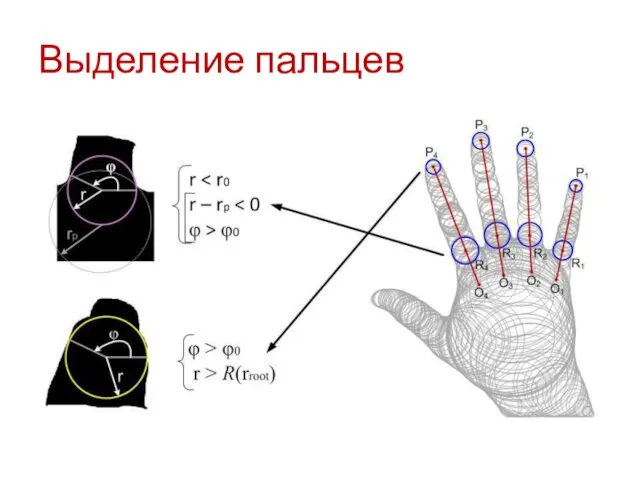
- 14. Выделение пальцев
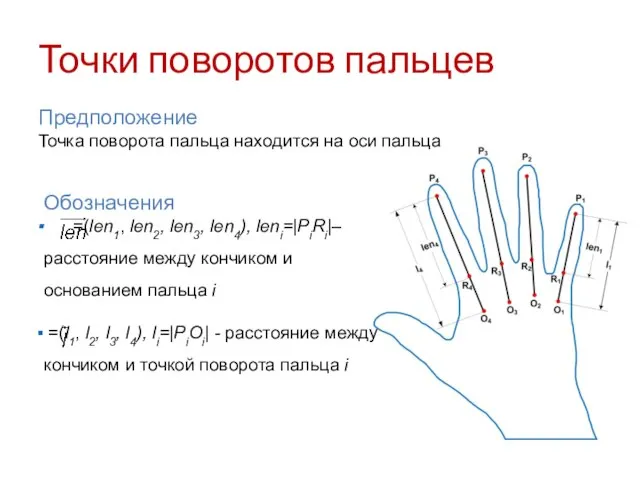
- 15. Точки поворотов пальцев Предположение Точка поворота пальца находится на оси пальца Обозначения =(len1, len2, len3, len4),
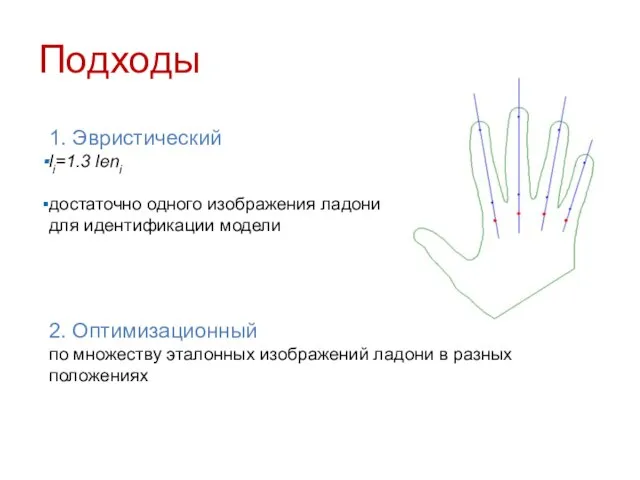
- 16. Подходы 1. Эвристический li=1.3 leni достаточно одного изображения ладони для идентификации модели 2. Оптимизационный по множеству
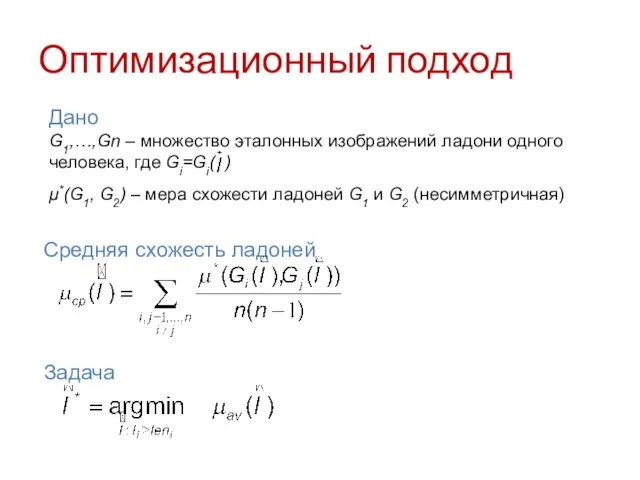
- 17. Оптимизационный подход Дано G1,…,Gn – множество эталонных изображений ладони одного человека, где Gi=Gi( ) μ*(G1, G2)
- 18. Оптимизационный подход Решение перебор: li∊[1.25 leni, 1.5 leni] численные методы … Пример l1 = 1.25 len1
- 19. Пример Эвристический подход Оптимизационный подход: полный перебор Оптимизационный подход: метод Нелдера-Мида
- 20. Содержание Предпосылки Модель ладони Определение точек поворотов Эксперименты
- 21. Исходные данные База ладоней 22 человека 45 эталонных изображений (2-3 для каждого человека) 52 тестовых изображения
- 23. Скачать презентацию
Слайд 3Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Слайд 4Задача распознавания формы ладони
бинарное изображение ладони
граничное представление
...
Задача распознавания формы ладони
бинарное изображение ладони
граничное представление
...

Слайд 5Метод решения
Построение эталонной модели ладони человека
Сравнение ладоней путём подгонки эталонной модели под
Метод решения
Построение эталонной модели ладони человека
Сравнение ладоней путём подгонки эталонной модели под
Слайд 6Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
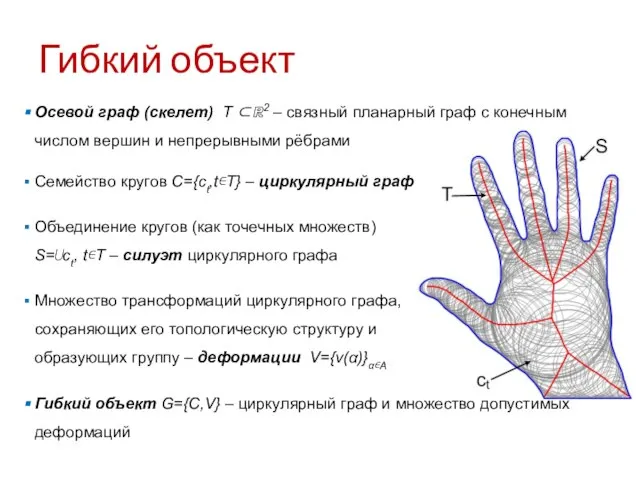
Слайд 7Гибкий объект
Семейство кругов C={ct,t∊T} – циркулярный граф
Объединение кругов (как точечных множеств) S=⋃ct,
Гибкий объект
Семейство кругов C={ct,t∊T} – циркулярный граф
Объединение кругов (как точечных множеств) S=⋃ct,
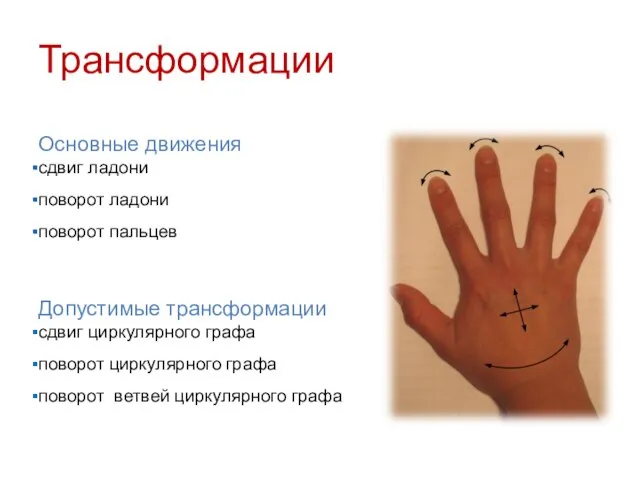
Слайд 8Трансформации
Основные движения
сдвиг ладони
поворот ладони
поворот пальцев
Допустимые трансформации
сдвиг циркулярного графа
поворот циркулярного графа
поворот ветвей циркулярного
Трансформации
Основные движения
сдвиг ладони
поворот ладони
поворот пальцев
Допустимые трансформации
сдвиг циркулярного графа
поворот циркулярного графа
поворот ветвей циркулярного
Слайд 9Разметка ладони
Основные шаги
Выделение пальцев
Определение точек поворотов пальцев
Обозначения
кончики: P1, P2, P3, P4
основания: O1,
Разметка ладони
Основные шаги
Выделение пальцев
Определение точек поворотов пальцев
Обозначения
кончики: P1, P2, P3, P4
основания: O1,

Слайд 10Сравнение формы ладоней
Эталонная ладонь G1
Тестовая ладонь G2
Сравнение формы ладоней
Эталонная ладонь G1
Тестовая ладонь G2

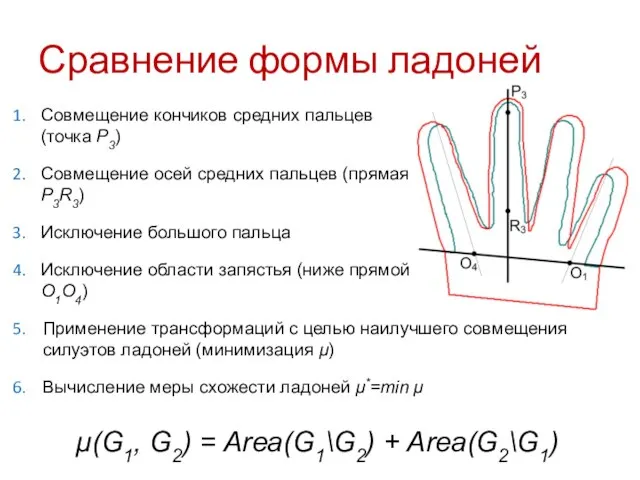
Слайд 11Сравнение формы ладоней
Совмещение кончиков средних пальцев (точка P3)
Совмещение осей средних пальцев (прямая
Сравнение формы ладоней
Совмещение кончиков средних пальцев (точка P3)
Совмещение осей средних пальцев (прямая
Слайд 12Подгонка
Площадь ладони в среднем – 40000 пикселей
Эталонная ладонь G1
Тестовая ладонь G2
Начальное совмещение
Наилучшее
Подгонка
Площадь ладони в среднем – 40000 пикселей
Эталонная ладонь G1
Тестовая ладонь G2
Начальное совмещение
Наилучшее

Слайд 13Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Слайд 14Выделение пальцев
Выделение пальцев
Слайд 15Точки поворотов пальцев
Предположение
Точка поворота пальца находится на оси пальца
Обозначения
=(len1, len2, len3,
Точки поворотов пальцев
Предположение
Точка поворота пальца находится на оси пальца
Обозначения
=(len1, len2, len3,
Слайд 16Подходы
1. Эвристический
li=1.3 leni
достаточно одного изображения ладони для идентификации модели
2. Оптимизационный
по множеству эталонных
Подходы
1. Эвристический
li=1.3 leni
достаточно одного изображения ладони для идентификации модели
2. Оптимизационный
по множеству эталонных
Слайд 17Оптимизационный подход
Дано
G1,…,Gn – множество эталонных изображений ладони одного человека, где Gi=Gi( )
μ*(G1,
Оптимизационный подход
Дано
G1,…,Gn – множество эталонных изображений ладони одного человека, где Gi=Gi( )
μ*(G1,
Слайд 18Оптимизационный подход
Решение
перебор: li∊[1.25 leni, 1.5 leni]
численные методы
…
Пример
l1 = 1.25 len1
l2 = 1.38
Оптимизационный подход
Решение
перебор: li∊[1.25 leni, 1.5 leni]
численные методы
…
Пример
l1 = 1.25 len1
l2 = 1.38
![Оптимизационный подход Решение перебор: li∊[1.25 leni, 1.5 leni] численные методы … Пример](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/368738/slide-17.jpg)
Слайд 19Пример
Эвристический подход
Оптимизационный подход: полный перебор
Оптимизационный подход: метод Нелдера-Мида
Пример
Эвристический подход
Оптимизационный подход: полный перебор
Оптимизационный подход: метод Нелдера-Мида

Слайд 20Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
Содержание
Предпосылки
Модель ладони
Определение точек поворотов
Эксперименты
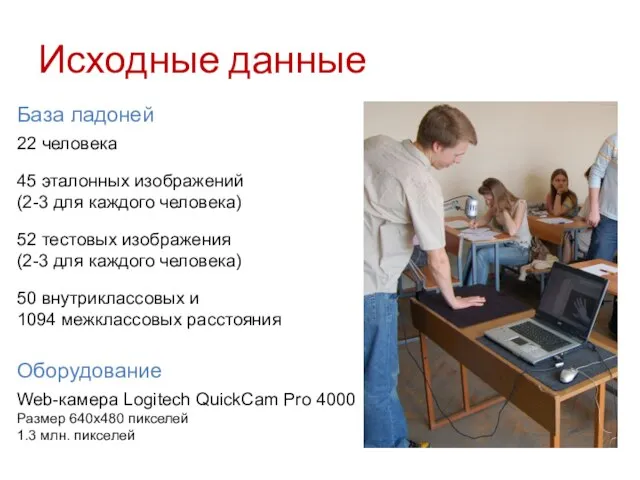
Слайд 21Исходные данные
База ладоней
22 человека
45 эталонных изображений
(2-3 для каждого человека)
52 тестовых изображения
(2-3 для
Исходные данные
База ладоней
22 человека
45 эталонных изображений
(2-3 для каждого человека)
52 тестовых изображения
(2-3 для
 Презентация на тему Биографии Лермонтова (3 класс)
Презентация на тему Биографии Лермонтова (3 класс) Праця підлітків
Праця підлітків Правописание слов с сочетанием ЖИ-ШИ
Правописание слов с сочетанием ЖИ-ШИ Утомление при физической и умственной работе восстановление
Утомление при физической и умственной работе восстановление Образ русского офицера в художественной литературе XIX - XX веков
Образ русского офицера в художественной литературе XIX - XX веков DEVELOPMENT OF ENGLISH VOCABULARY FROM the 12
DEVELOPMENT OF ENGLISH VOCABULARY FROM the 12 Презентация на тему Политическое развитие в начале XX века
Презентация на тему Политическое развитие в начале XX века  Умножители частоты
Умножители частоты Экслибрис. Виды экслибрисов
Экслибрис. Виды экслибрисов Сертификация услуг и работ управляющих компаний
Сертификация услуг и работ управляющих компаний Презентация на тему озеро Байкал
Презентация на тему озеро Байкал  Собрание родителей 11 классов
Собрание родителей 11 классов Лезгины
Лезгины Группа «Эффективные модели обновления систем повышения квалификации и аттестации педагогических работников»
Группа «Эффективные модели обновления систем повышения квалификации и аттестации педагогических работников» Презентация на тему Первый крестовый поход
Презентация на тему Первый крестовый поход Создание программ-функций в среде MathCAD
Создание программ-функций в среде MathCAD Путешествие в сказочный лес
Путешествие в сказочный лес Выполнение шрифтовых работ
Выполнение шрифтовых работ Вводный урок
Вводный урок Фреска Богоматери Оранта
Фреска Богоматери Оранта Нестабильная система
Нестабильная система Эмфизема легких
Эмфизема легких Распространение результатов проекта TEMPUS TACIS III на территории Новгородского региона в 2005-2007 годах
Распространение результатов проекта TEMPUS TACIS III на территории Новгородского региона в 2005-2007 годах Белки. Свойства и функции
Белки. Свойства и функции Ткачева Галина Андреевна
Ткачева Галина Андреевна Средства художественной выразительности
Средства художественной выразительности СТО ВЕЛИКИХ ИМЕН РОССИИ
СТО ВЕЛИКИХ ИМЕН РОССИИ Функция у=ах2+вх+с, где а, в и с заданные действительные числа, а?0, х – действительная переменная, называется квадратичной функцией
Функция у=ах2+вх+с, где а, в и с заданные действительные числа, а?0, х – действительная переменная, называется квадратичной функцией