- Оптический датчик, следование по линии

Содержание
- 2. 1. Остановка на линии Собрать робота Domabot с присоединенным оптическим датчиком Сделать и загрузить в робота
- 3. Блок-схема остановки на черной линии Проверить яркость >50% Двигатели B, C - вперед
- 4. 2. Следование по линии Необходимо сделать программу следования робота по линии. Условия: Двигатель B – левый,
- 5. Блок-схема движения по черной линии Проверить яркость >50% Двигатель C – постоянное движение Двигатель B -
- 6. Траектория движения робота
- 8. Скачать презентацию
Слайд 21. Остановка на линии
Собрать робота Domabot с присоединенным оптическим датчиком
Сделать и загрузить
1. Остановка на линии
Собрать робота Domabot с присоединенным оптическим датчиком
Сделать и загрузить
Слайд 3Блок-схема остановки на черной линии
Проверить яркость
>50%
<50%
Двигатели B, C - вперед
Блок-схема остановки на черной линии
Проверить яркость
>50%
<50%
Двигатели B, C - вперед

Слайд 42. Следование по линии
Необходимо сделать программу следования робота по линии. Условия:
Двигатель
2. Следование по линии
Необходимо сделать программу следования робота по линии. Условия:
Двигатель
Слайд 5Блок-схема движения по черной линии
Проверить яркость
>50%
<50%
Двигатель C – постоянное движение
Двигатель B -
Блок-схема движения по черной линии
Проверить яркость
>50%
<50%
Двигатель C – постоянное движение
Двигатель B -

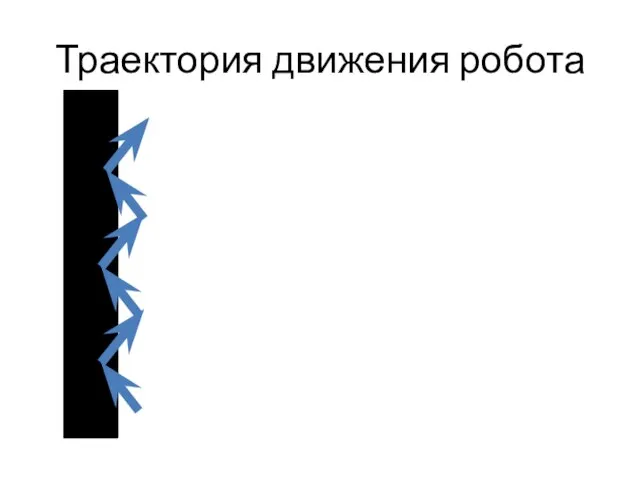
Слайд 6Траектория движения робота
Траектория движения робота
 “ Прорывные проекты АО “ Национальная компания “КазМунайГаз”
“ Прорывные проекты АО “ Национальная компания “КазМунайГаз” Leçon dix
Leçon dix Банковская система Турции. Сравнение с Россией
Банковская система Турции. Сравнение с Россией Приключения Флоры
Приключения Флоры Барклай де Толли
Барклай де Толли КОМЕТА 3
КОМЕТА 3 Основы HTML. Разработка Web-сайта
Основы HTML. Разработка Web-сайта «Социально-экономическое будущее села Умыган»
«Социально-экономическое будущее села Умыган» Результативность занятий по дополнительным образовательным программам 2019-20 уч.год
Результативность занятий по дополнительным образовательным программам 2019-20 уч.год Наша планета Земля - огромная и удивительная
Наша планета Земля - огромная и удивительная Графическая работа №7 Эскиз вала
Графическая работа №7 Эскиз вала Доклад Партнерские связи Лешуконского, Мезенского и Пинежского районов как способ развития территории
Доклад Партнерские связи Лешуконского, Мезенского и Пинежского районов как способ развития территории Проверка и калибровка комплектов регулирования температур
Проверка и калибровка комплектов регулирования температур Использование новых информационных технологий в преподавании иностранного языка
Использование новых информационных технологий в преподавании иностранного языка Анализ МОУ гимназии №2 г.Иркутска по основным показателям работы
Анализ МОУ гимназии №2 г.Иркутска по основным показателям работы ИКТ в обучении английскому языку
ИКТ в обучении английскому языку Сигнализация на железнодорожном транспорте
Сигнализация на железнодорожном транспорте Citation бриф (002)
Citation бриф (002) Чары. Секретный день…
Чары. Секретный день… Чудесная раковина
Чудесная раковина Прокариоты
Прокариоты Капитализация человеческого потенциала в (моно)городах: практика и технологии
Капитализация человеческого потенциала в (моно)городах: практика и технологии Аудит операций с материальнопроизводственными запасами. Лекция 9
Аудит операций с материальнопроизводственными запасами. Лекция 9 Информация
Информация Административная ответственность несовершеннолетних
Административная ответственность несовершеннолетних Презентация "Струнно-смычковые" - скачать презентации по МХК
Презентация "Струнно-смычковые" - скачать презентации по МХК Kонкурентные преимущества изделий группы Талема
Kонкурентные преимущества изделий группы Талема Алтай
Алтай